Изобретение относится к области приборостроения или конструирования устройств для защиты от вибраций/микроускорений измерительной и технологической аппаратуры активным способом.
Существуют системы активной защиты от микроускорений (далее САЗМ), предназначенные для работы на Земле или в невесомости (на космических аппаратах), которые строятся по одинаковой схеме, но сильно отличаются по конструкции и требуемым характеристикам.
На космических аппаратах в защите от микроускорений нуждаются различные измерительные приборы, экспериментальные установки для исследований по гидромеханике, росту кристаллов, в диапазоне частот 0,01 Гц - 300 Гц. В земных условиях защита от вибраций в диапазоне частот 1 Гц - 300 Гц необходима для большого числа прецизионной измерительной аппаратуры, зондовых микроскопов, дифрактометров, различных приборов, использующихся в микроэлектронике и в нанотехнологиях. Во всех случаях САЗМ фактически представляют собой шестиканальные авторегуляторы, "обслуживающие" (защищающие) шесть степеней свободы механической системы (три поступательные моды LX, LY, LZ и три торсионные ТХ, TY, TZ).
Функциональная схема одноканальной/одномодовой САЗМ показана на фиг.1. Защищаемый объект 1, перемещающийся лишь в одном направлении, соединен с акселерометром 2 и бесконтактным магнитоэлектрическим движителем 3. Контур с отрицательной обратной связью замыкают электронные цепи 4 с функцией передачи K(jω). Устойчивость и другие характеристики такой схемы авторегулирования (в данном случае это коэффициент подавления вибраций) определяются так называемой петлевой функцией передачи K(jω)·H(jω), где второй сомножитель представляет собой произведение функций передачи механической системы, акселерометра и магнитоэлектрического движителя (Н(jω)=Нм(jω)·НА(jω)·Нмэд(jω). Для такой системы легко может быть достигнут высокий коэффициент подавления вибраций (40-60 дБ). В реальной шестимодовой системе коэффициент подавления всегда ограничен из-за потери устойчивости в результате взаимодействия между отдельными модами или, точнее, между шестью отдельными цепями/контурами авторегулирования.
Наиболее близкими к заявляемому являются системы, разработанные для американского модуля Международной космической станции, а также некоторые виброзащитные столы, предназначенные для защиты измерительной аппаратуры на Земле.
Системы STABLE [D.Edberg, R.Boucher, D.Schenck, G.Nurre, M.Whorton, Y.Kim, D.AIhorn, "Results of the STABLE Micrograviti Vibration Isolation Flight Experiment' presented at the 19th Annual AAS Guidance and Control Conference, Feb.7-11, 1996, Breckenridge, CO.] и g-LIMIT [Mark S. Whorton, "g-LlMIT: A Microgravity Isolation System for the International Space Station", NASA Marshall Space Fligth Center, Huntsville, AL, USA, 35812, mark.whorton@msfc.nasa.gov] обладают всеми необходимыми характеристиками (диапазон рабочих частот 0,01 Гц - 200 Гц, коэффициент подавления микроускорений не менее 40 дБ), однако они рассчитаны на небольшой компактный защищаемый объект, эллипсоид инерции которого близок к сфере (важность этого параметра будет обсуждаться ниже). Устойчивость систем авторегулирования в этих конструкциях достигается расположением трех двухкоординатных (двунаправленных) магнитоэлектрических движителей в одной плоскости с центром тяжести защищаемого объекта (в плане они расположены неортогонально в вершинах равностороннего треугольника). Эти конструкции имеют узко специфическое назначение, они будут непригодны для объектов, объем которых превышает 4-6 кубических дециметра.
Система ARIS [Bushell G.S. and Becraft M.D. "Micrograviti Performance Flight Characterisation of an International Space Station Active Rack Isolation Prototipe System", in Proceeding of The 16th IEEE Instrumentation and Measurement Technology Conference (1MTC/99), Venice, Italy, May 24-26, 1999] рассчитана на защиту от микроускорений приборных стоек. Она функционирует в пределах заданных параметров, однако содержит неоправданно сложную, избыточную, систему неортогонально расположенных магнитоэлектрических движителей, управляемую вычислительным комплексом.
Если описанные выше САЗМ, рассчитанные на изготовление единичных экземпляров для космических аппаратов, могут иметь специфическую конструкцию, а их сложность и стоимость не являются основными критериями, то для приборов, рассчитанных на широкое применение, (например, виброзащитные столы), оптимальность конструкции является определяющей.
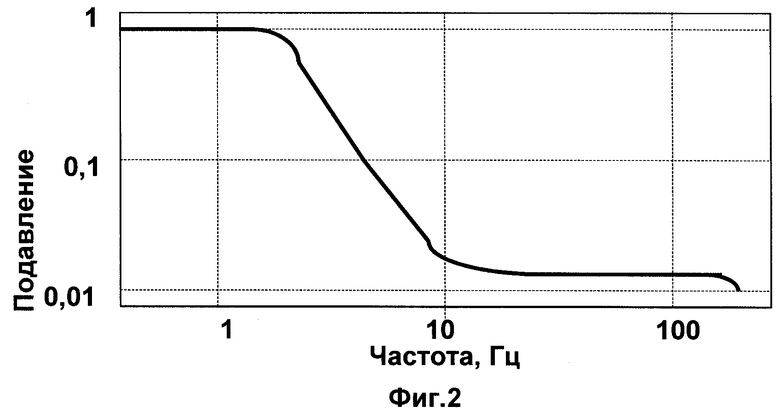
Ряд фирм выпускает виброзащитные столы, рассчитанные на вес защищаемой аппаратуры от 50 до 1000 кг и выше. Характерная для всех этих устройств частотная зависимость коэффициента передачи показана на фиг.2 [пример из описания конструкции: MOD2 - the anti-vibration solution; Nanofilm Technologie GmbH, Postfach 2954-37019 Gottingen-Germany e-mail: 100573.3164@compuserve.com]. Как видно, система не эффективна при частотах ниже 2 Гц, а максимальный коэффициент подавления вибраций достигается лишь при 10 Гц. Этот существенный недостаток рассматриваемых устройств вызван паразитным сигналом наклона акселерометров в поле притяжения Земли. Так, для устройств с характерными размерами около 0,5 м отношение сигнала наклона к сигналу ускорения при частоте 1 Гц равно единице и увеличивается с понижением частоты.
Заявляемое изобретение решает технические задачи оптимизации конструкций САЗМ, увеличения их эффективности, расширения активного диапазона в область низких частот.
Поставленная цель достигается путем разделения шести отдельных мод колебаний механической системы (трех торсионных и трех поступательных) или шести цепей авторегулирования, которое осуществляется, во-первых, симметричным расположением акселерометров и магнитоэлектрических движителей относительно эллипсоида инерции механической системы и, во-вторых, с помощью электронных корректирующих цепей.
Эллипсоид момента инерции тела в точке О описывается выражением

где 

Подинтегральные выражения для Jx, Jy, Jz представляют собой произведения элементов массы на квадраты их расстояния до соответствующей оси. Поэтому эти интегралы являются моментами инерции тела относительно координатных осей Ox, Oy, Oz. Три остальных интеграла Jxy=Jyx, Jyz=Jzy, Jzx=Jxz называются центробежными моментами инерции (девиаторными моментами).
Если за координатные оси принять оси эллипсоида, то его уравнение принимает вид

где J1, J2, J3 - главные моменты инерции. Видно, что в системе осей Ox'y'z' центробежные
или девиаторные моменты инерции равны нулю. Когда точка О совпадает с центром инерции тела, эллипсоид инерции называется центральным эллипсоидом инерции; его оси называются главными центральными осями инерции, а моменты инерции относительно этих осей будут главными центральными моментами инерции J1 c, J2 c, J3 c.
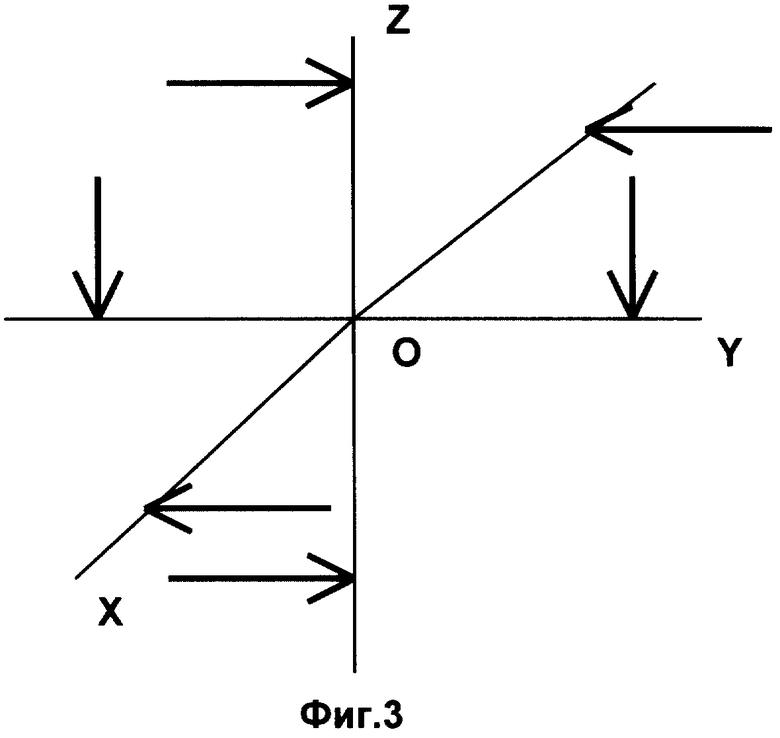
На фиг.3 схематически показана симметричная конструкция, содержащая шесть магнитоэлектрических движителей и шесть акселерометров (каждая из шести стрелок обозначает пару: магнитоэлектрический движитель и акселерометр, расположенные условно в одной точке). Если главные центральные оси инерции механической системы Ox'y'z' совпадают с осями координатной системы Oxyz на фиг.3, то с помощью магнитоэлектрических движителей, расположенных как показано на рисунке, к механической системе наиболее просто могут быть приложены возвращающие силы Fx, Fy, fz и возвращающие моменты Мх, My, Mz, каждый из которых воздействует лишь на одну степень свободы. Для функционирования на базе такой конструкции шестимодовой САЗМ необходимы электрические цепи, которые из сигналов акселерометров выделяют сигналы, соответствующие каждой из шести мод, а также такие сигналы управления магнитоэлектрическими движителями, чтобы возвращающие моменты были параллельны главным центральным моментам инерции, а возвращающие силы приложены к центру инерции механической системы: это и есть условие изоляции отдельных мод колебаний.
Важно подчеркнуть, что ортогональное, симметричное расположение акселерометров и магнитоэлектрических движителей в предлагаемой схеме является естественным/универсальным, поскольку главные центральные оси инерции тела любой формы ортогональны. Эта отличная от упомянутых выше (STABLE, g-LlMIT, ARIS) схема является более гибкой и способна обеспечить весьма высокую эффективность в результате разделения/изоляции отдельных мод колебаний или цепей регулирования.
В отличие от одномодовой САЗМ, показанной на фиг.1, функция передачи механической системы в данном случае представляет собой квадратную векторную матрицу Нik(jω), i,k=1, ..., 6. Однако в идеальной ситуации, описанной выше, межмодовое взаимодействие полностью отсутствует, так что отличны от нуля только диагональные члены матрицы Нii(jω), поэтому система может управляться шестью независимыми регуляторами.
Теория и техника авторегуляторов многокоординатных/многомерных систем в настоящее время развита весьма полно (см., напр., [Трофимов А.И., Егупов Н.Д., Дмитриев А.Н. "Методы теории автоматического управления, ориентированные на применение ЭВМ", М.: Энергоатомиздат, 1997. 656 с.] с обширным списком литературы). В качестве примеров управляемых многомерных систем можно привести: летательные аппараты, космические аппараты, копировально-фрезерные станки, роботы, авиационные турбореактивные двигатели. Основой таких авторегуляторов являются компенсирующие или диагонализирующие цепи, которые устраняют взаимное влияние управляемых переменных. Очевидно, что при этом каждый из каналов авторегулирования может корректироваться независимо от других, а динамическая точность и качество многомерной системы могут быть такими же высокими, как у одномерных систем (естественно, при достаточно высокой степени компенсации взаимного влияния управляемых переменных).
Как отмечалось выше, для симметричной конструкции, в которой главные центральные оси инерции механической системы совпадают с осями координат, на которых, как показано на фиг.3, симметричным образом расположены магнитоэлектрические движители и акселерометры, диагональность векторной матрицы функции передачи обеспечивается только механическими средствами, так что в электронных компенсаторах/диагонализаторах нет необходимости. Очевидно, что такие конструкции могут проектироваться лишь для САЗМ, рассчитанных на постоянный/несменяемый защищаемый объект. В таких случаях могут быть созданы адаптированные к объекту системы магнитоэлектрических движителей, в которых с помощью только механической юстировки достигается разделение мод колебаний (диагонализация функции передачи Hik(jω)).
Существует ряд устройств, которые можно/необходимо проектировать как отдельный конструктивный узел вместе с адаптированным к ним САЗМ. Однако такие САЗМ, как, например, виброзащитные столы, должны быть универсальными, они должны функционировать с заменяемыми объектами разного веса и формы и различным расположением центра тяжести. В этом случае для диагонализации функции передачи Hik(jω) дополнительно к механическим средствам необходимо включение электронных компенсаторов. В САЗМ с несменяемыми защищаемыми объектами также могут потребоваться электронные компенсаторы/диагонализаторы, если механическими средствами диагонализация функции передачи недостижима по конструктивным соображениям (например, невозможно расположить магнитоэлектрические движители в необходимых/оптимальных позициях).
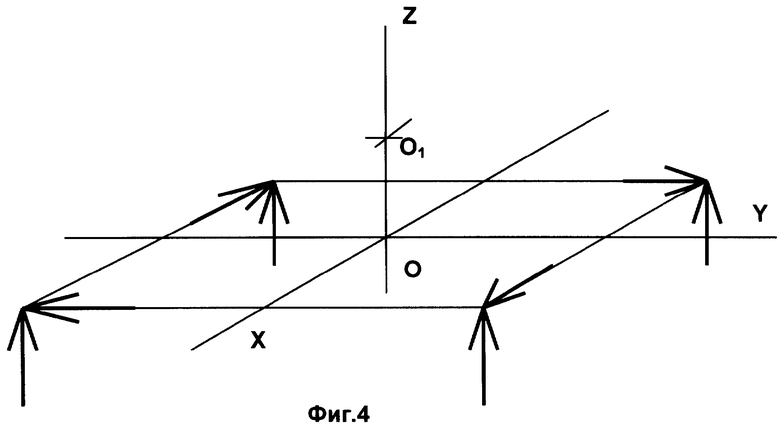
На фиг.4 показан один из возможных вариантов расположения магнитоэлектрических движителей на виброзащитном столе. (Здесь также, как на фиг.3, каждая из шести стрелок обозначает пару: магнитоэлектрический движитель и акселерометр, расположенные условно в одной точке). Как видно из фиг.4, если центр инерции механической системы расположен на поверхности стола в начале координат О, а ее главные центральные оси инерции Ox'y'z' совпадают с осями координатной системы Oxyz, функция передачи механической системы Hik(jω) может быть диагонализирована только механическими средствами, также как в примере, показанном на фиг.3. Однако, если, например, центр инерции механической системы перемещен в точку O1 (соответствует установке на поверхность стола защищаемого прибора), то без электронных компенсаторов диагонализация функции передачи невозможна.
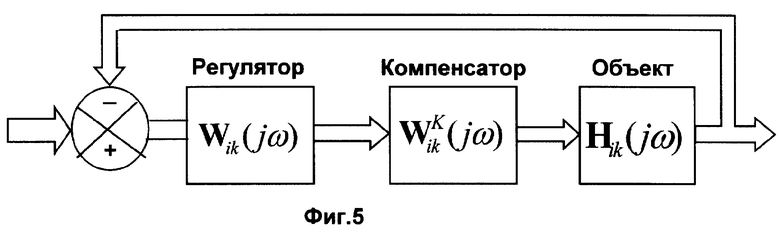
Блок-схема САЗМ, содержащая электронный компенсатор/диагонализатор, представлена на фиг.5. Поскольку функция передачи регулятора Wik(jω) является диагональной матрицей (в данном случае регулятор состоит из шести отдельных цепей), для того чтобы функция передачи разомкнутой или замкнутой системы на фиг.5 имела диагональный вид, необходимо, чтобы диагональной была функция передачи последовательно соединенных компенсатора и объекта:

Из зависимости (3) может быть определена функция передачи компенсатора,

Количество конструктивных элементов шестикоординатного компенсатора, составляющих матрицу Wik K(jω), может изменяться от полного до некоторого минимума, который определяется количеством недиагональных членов матрицы Hik(jω). Наименьшее количество конструктивных элементов компенсатора необходимо, например, если центр инерции механической системы смещен только вдоль одной из координатных осей системы механических движителей, как это показано на фиг.4. Количество конструктивных элементов уменьшается также, если главные центральные оси инерции механической системы Jc 1, Jc 2, Jc 3 не сильно отличаются друг от друга. Очевидно, что в этом случае существенны лишь координаты центра инерции механической системы.
Следует отметить, что для функционирования многоканальных/многомодовых САЗМ строгое равенство нулю недиагональных членов матрицы Hik(jω) на самом деле не требуется. Однако чем выше требования к качеству САЗМ, тем эффективнее должно быть их подавление.
Во многих случаях достаточными оказываются упрощенные, статические компенсаторы, содержащие лишь усилители. При этом формула (4) будет иметь вид:

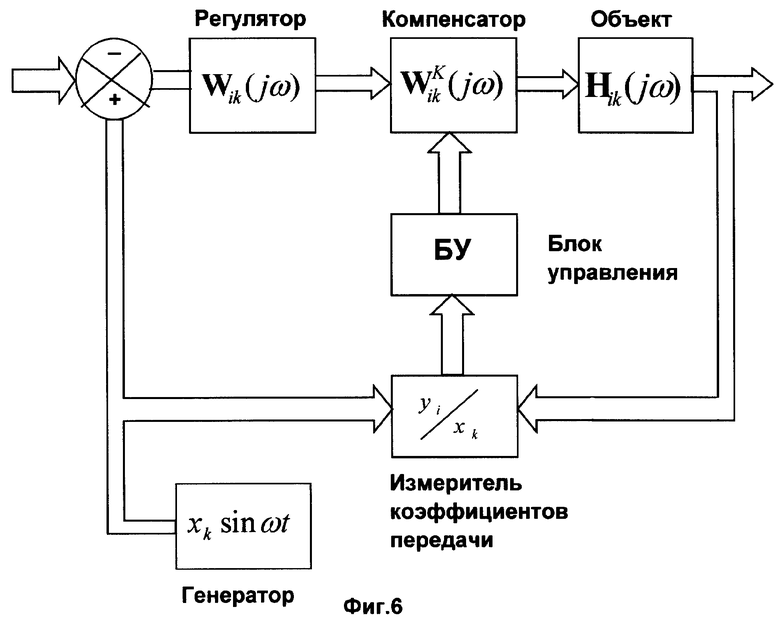
Для того, чтобы правильно сконструировать электронный компенсатор, необходимо каким-либо способом определить матричную функцию передачи Hik(jω) и затем согласно уравнениям (4) или (5) определить Wik K(jω) или Wik K(0). Если расчетным способом этого сделать нельзя, то необходимо выполнить тестирование объекта путем подачи последовательно на шесть каналов управления стандартного сигнала и измерения реакции на всех шести выходах при разомкнутых цепях регулирования.
Как видно из блок-схемы на фиг.6, матрица функции передачи может быть определена из измеренной матрицы коэффициентов передачи yi/xk. Далее блок управления в ручном, полуавтоматическом или автоматическом режиме производит коррекцию компенсатора, минимизируя недиагональные элементы функции передачи Wik K(jω)·Hik(jω).
Для тех случаев, когда центр инерции защищаемого объекта смещается в процессе работы САЗМ, может использоваться полуавтоматическая / автоматическая схема коррекции функции передачи компенсатора, функционирующая при замкнутых цепях регулирования. В этом случае, как показано на фиг.7, измеряются величины взаимных межмодовых корреляций Сik шумового/флуктуационного сигнала.
Коэффициенты корреляции по определению связаны с энергией взаимодействия между отдельными модами, так что, получив матрицу Сik, можно, как показано на фиг.7, произвести коррекцию компенсатора с помощью блока управления БУ в ручном, полуавтоматическом или автоматическом режиме.
Следует отметить, что в рассматриваемых конструкциях САЗМ основной является механическая компенсация межмодового взаимодействия, а электронная компенсация в большинстве случаев является дополнительной, "подстроечной", поэтому она может быть линейной. Это означает, что для коррекции достаточно определить матрицу коэффициентов корреляции Сik (а не функции корреляции Сik(τ)) и, соответственно, матрицу коэффициентов передачи yi/xk (а не функции yi(ω)/xk).
САЗМ с изоляцией/разделением отдельных мод колебаний, рассчитанные для работы на Земле, обладают важным отличительным свойством, позволяющим расширить рабочий диапазон в область низких частот. Очевидно, что акселерометры любого типа, расположенные в поле тяготения Земли, кроме сигнала ускорения дают "паразитный" сигнал наклона. При горизонтальном расположении акселерометров сигнал наклона пропорционален sinϕ˜ϕ (ϕ - малый угол наклона). Для вертикально расположенных акселерометров сигнал наклона пропорционален cosϕ˜ϕ2. Если САЗМ, схематически показанная на фиг.4, имеет характерные размеры порядка 0,5 м, то для торсионных мод ТХ и TY отношение сигналов ускорения Ua к сигналам наклона Uϕ горизонтально расположенных акселерометров Ua/Uϕ порядка единицы для частоты ˜ 1 Гц. С понижением частоты это отношение "полезного" сигнала к "паразитному" быстро уменьшается по квадратичному закону, Ua/Uϕ˜ω2. Именно с этим обстоятельством связано показанное на фиг.2 ограничение активного диапазона частот виброзащитного стола в области 2 Гц.
Поскольку в схеме с разделением мод колебаний выделяются сигналы акселерометров, измеряющие наклоны (в данном случае относительно осей Ох и Оу, то есть моды ТХ и TY), появляется возможность, определив величину соответствующих наклонов ϕ, скомпенсировать/подавить "паразитные" сигналы. Электронные компенсирующие цепи, имеющие точность ±1%, смещают нижнюю границу диапазона рабочих частот до 0,2-0,3 Гц, что существенно расширяет область применения виброзащитных столов и других САЗМ, рассчитанных на работу в поле тяготения Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ВИБРОЗАЩИТНАЯ ПАНЕЛЬ (БОКС ) С КОМПЕНСАЦИЕЙ СИГНАЛА НАКЛОНА АКСЕЛЕРОМЕТРОВ ДЛЯ СТАЦИОНАРНЫХ УСЛОВИЙ И ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2337390C2 |
| АКТИВНЫЙ ИЗОЛЯТОР ИСТОЧНИКОВ ВИБРАЦИЙ | 2008 |
|
RU2395736C1 |
| СПОСОБ ОПТИМИЗАЦИИ ДИНАМИЧЕСКИХ УСЛОВИЙ ФУНКЦИОНИРОВАНИЯ ГРАВИТАЦИОННО-ЧУВСТВИТЕЛЬНЫХ УСТАНОВОК В УСЛОВИЯХ ОСТАТОЧНЫХ МИКРОУСКОРЕНИЙ НА БОРТУ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2369535C1 |
| УСТРОЙСТВО ПАССИВНОЙ ЗАЩИТЫ АППАРАТУРЫ ОТ ВИБРАЦИОННЫХ МИКРОУСКОРЕНИЙ НА КОСМИЧЕСКОМ АППАРАТЕ | 2013 |
|
RU2544286C1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| Активное виброзащитное устройство | 1987 |
|
SU1661525A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |

Изобретение относится к приборостроению и может быть использовано для защиты измерительной и технологической аппаратуры от вибраций и микроускорений. Система содержит шесть или более пар акселерометров и магнитоэлектрических движителей, а также электронные цепи управления. Акселерометры и магнитоэлектрические движители размещены симметричной группой, центр симметрии которой совпадает с центром центрального эллипсоида инерции защищаемого объекта, а ортогональные оси симметрии - с главными центральными осями инерции объекта. При этом возвращающие силы могут быть приложены к центру инерции, а моменты сил - параллельно главным центральным осям инерции объекта. Технический результат заключается в повышении степени защиты объекта от воздействия микрогравитации и вибраций, в том числе в области низких частот. 4 з.п. ф-лы, 7 ил.
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| Marshall Space Flight Center | |||
| Трехкоординатный вибростенд | 1979 |
|
SU849030A1 |
| Бутиков Е.И | |||
| и др | |||
| Автоматизированный практикум по физике для студентов второго курса | |||
| Механика: Учебно-методическое пособие, СПб., 2004, с.47-50. | |||

