ных посредством подвижных оснований 2 и 6 шарнирно-рычажных параллелограмма. Первый параллелограмм ABCD установлен на неподвижном основании в виде стойки 4. Третий параллелограмм включает подвижное основание 9, являющееся выходным звеном механизма.Звенья первого параллелограмма ABCD размещены в одной плоскости со звеньями второго параллелограмма BEFC, а звенья третьего параллелограмма GHKL расположены в плоскости, перпендикулярной плоскости первого и второго параллелограммов. Привод механизма выполнен в виде трех пазовых кулачков 11, 12 и 13, в пазах которых размещены ролики 14, 15 и 16. Ролики 14 и 15 установлены на боковых рычагах 3 и 5
1
Изобретение относится к машиностроению и может быть использовано в станкостроении и робототехнике.
Цель изобретения - расширение кинематических возможностей механизма путем обеспечения пространственного поступательного движения выходного звена с любой требуемой траекторией его точек,
На чертеже представлена кинемати- ческая схема предлагаемого механизма
Кулачково-рычажный механизм содержит рычажно-шарнирный десятизвенник, представляющий собой тройной шарнирный параллелограмм, т.е. три последо вательно соединенные параллелограмма Первый параллелограмм состоит из бокового рычага 1, подвижного основани 2, второго бокового.рычага 3 и неподвижного основания, выполненного в виде стойки-4, Подвижное основание 2 первого параллелограмма является основанием второго параллелограмма, включающего также боковой рычаг 5, второе подвижное основание 6 и второй боковой рычаг 7, Звенья этих параллелограммов могут совершать плоское движение в одной плоскости ABEFCD
Подвижное основание 6 второго параллелограмма служит основанием тре- тьего параллелограмма, звенья которого могут совершать плоское движение
первого и второго параллелограммов, а ролик 16 установлен на качающемся рычаге 17, на котором установлены два ролика 19 с параллельными осями. Между роликами 19 размещен ролик 20,связанный с подвижным осн ованием 9. При одновременном вращении кулачков 11, 12 и 13 ролики 14, 15 и 16 посредством рычагов 3,5 и 17 вызывают перемещение звеньев соответствующих параллелограммов ,, В результате сложения движений звеньев трех параллелограммов выходное звено механизма - подвижное основание 9 совершает пространственное поступательное перемещение с траекторией, определяемой профилями пазов кулачков 11, 12 и 13 и их взаимным расположением. 1 ил.
в плоскости GHKL, перпендикулярной плоскости ABEFCD, Третий параллелограмм состоит также из бокового рычага 8, второго подвижного основания 9, являющегося выходным звеном механизма и второго бокового рычага 10,
Привод механизма выполнен в виде трех жестко связанных между собой пазовых кулачков, двух дисковых кулачков 11 и 12 и одного цилиндрического кулачка 13. Все кулачки установлены с возможностью вращения на оси шарнира стойки 4. Ролик 14 установлен на боковом рычаге 3 первого параллелограмма ABCD и размещен в пазу кулачка 11, ролик 15 установлен на боковом рычаге 5 параллелограмма BEFC и размещен в пазу кулачка 12, а ролик 16 установлен на рычаге 17 и размещен в пазу кулачка 13, Рычаг 17 установлен с возможностью качания на непод- вижйой оси 18, связанной со стойкой 4, На рычаге 17 установлены два параллельных ролика 19, между ними размещен ролик 20, который своей осью связан с выл:одным звеном механизма - подвижным основанием 9 третьего параллелограмма.
Механизм работает следующим образом.
При одновременном вращении кулачков 11-13 размещенные в их пазах ро3130
лики 14-16 посредством рычагов 3, 5 и 17, взаимодействуя со звеньями параллелограммов ABCD, BEFC и GHKL, приводят в движение звенья этих параллелограммов в соответствующих Ш1ОСкостях.В результате сложения движений звеньев трех параллелограммов выходное звено механизма - подвижное основание 9 совершает пространственное поступательное движение с траектори- ей, определяемой профилями пазов кулачков 11-13 и их взаимным расположением. За один цикл работы механизма, соответствующий полному обороту кулачков 11-13, подвижное основание 9 описывает замкнутую пространственную траекторию.
Траектория точек выходного звена предлагаемого механизма может иметь любую кривизну, точки излома и возврата.
Формула изобретения
Кулачково-рычажный механизм, содержащий два лежащих в одной плоскости шарнирных параллелограмма с общим подвижным основанием, первый из которых имеет неподвижное основание в виде стойки, и привод, выполненный в
Редактор Ю,Середа
Заказ 1610/33Тираж 812Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
54
виде жестко связанных между собой и установленных с возможностью вращения на оси шарнира стойки двух пазовых дисковых кулачков и взаимодействующих с их пазами двух роликов/один из которых установлен на боковом рычаге первого параллелограмма, а другой - на боковом рычаге второго параллелограмма, отличающий- с я тем, что, с целью расширения кинематических возможностей путем обеспечения пространственного поступательного движения, он снабжен разме- щенньм в плоскости, перпендикулярной плоскости параллелограммов, третьим шарнирным параллелограммом, одно из оснований которого жестко связано с подвижным основанием второго параллелограмма, роликом, ось которого закреплена на втором основании третьего параллелограмма, установленным на оси шарнира стойки пазовым цилиндрическим кулачком, связанной со стойкой неподвижной осью и установленном на ней с возможностью качания рычагом с тремя установленными на нем роликами, один из которых взаимодействует с пазом цилиндрического кулачка, а два других, имеющие параллельные оси, взаимодейств тот с роликом второго основания третьего параллелограмма.
Составитель А,Жук Техред Л.Сердюкова
Корректор И.Эрдейи
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| Кулачково-зубчато-рычажный механизм | 1987 |
|
SU1567825A1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| Способ клеевого соединения деталей одежды и устройство для нанесения порошка клея на детали одежды | 1958 |
|
SU121728A1 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 1994 |
|
RU2118274C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| УДАРНО-ПОВОРОТНЫЙ МЕХАНИЗМ | 1995 |
|
RU2100597C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к машиностроению, а именно к кулачково-рычаж- ным механизмам. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения пространственного поступательного перемещения выходного звена. Механизм со- три последовательно соединен(Л со о САР СП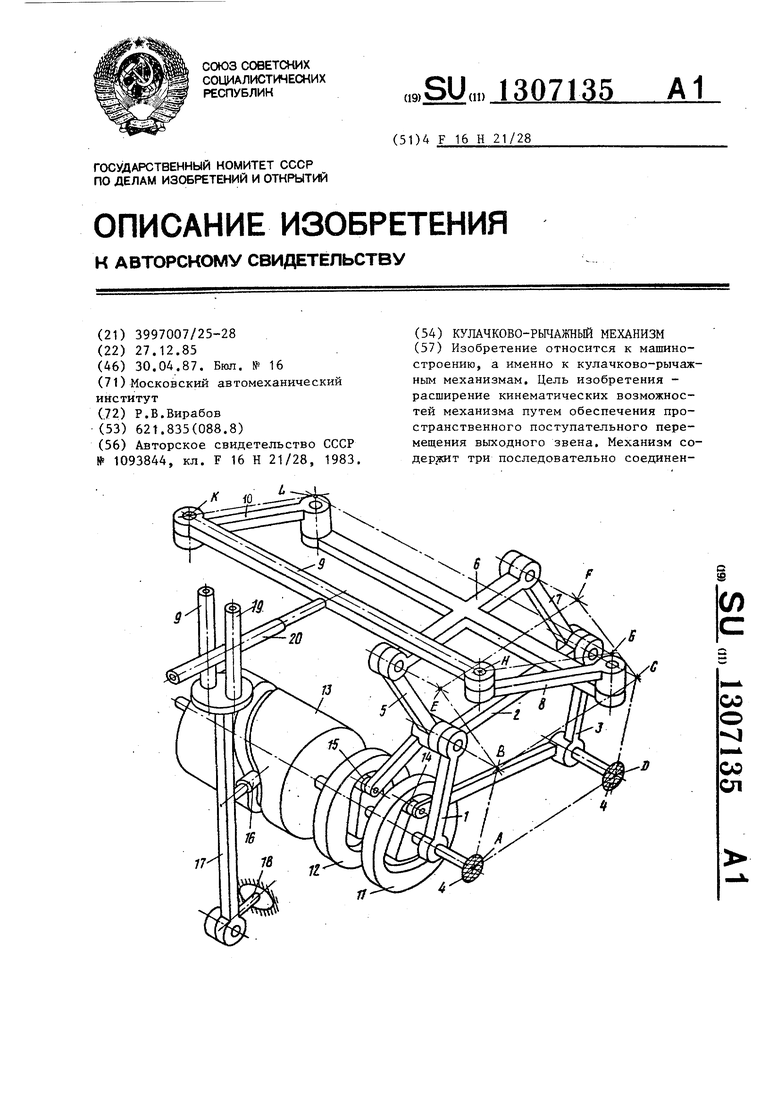
| Кулачково-рычажный механизм | 1983 |
|
SU1093844A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
