Изобретение относится к области измерительной техники и может быть использовано для информационного оповещения водителя о расстоянии, пройденном транспортным средством, об уровне инерционности тормозной системы, о величине тормозного пути, об исправности тормозной системы.
Недостатком известных [1, 2, 3] способов и устройств контроля расстояния, пройденного транспортным средством, является низкая информативность, обусловленная измерением только пройденного пути и отсутствием информации об уровне инерционности тормозной системы, о состоянии тормозной системы и о величине тормозного пути.
Технической задачей изобретения является повышение информативности.
Технический результат изобретения достигается тем, что в способе функционирования информационно-вычислительной системы автомобиля, заключающемся в измерении расстояния, пройденного автомобилем, путем измерении оборотов вращения переднего колеса, формировании сигнала единичного приращения пути, установке значения единичного приращения пути для соответствующих условий движения, суммировании текущих значений пройденного расстояния, сравнении полученных значений с заданными, отображении информации о пройденном пути на индикаторе, осуществлении коррекции значений приращений пути исходя из условий движения автомобиля, осуществлении анализа условий движения автомобиля на основе анализа знака и величины ускорений движущегося автомобиля и осуществлении автоматической коррекции значений приращения пути исходя из условий движения автомобиля, дополнительно определяют уровень инерционности системы торможения путем определения временного интервала между моментом времени нажатия на педаль тормоза и моментом времени начала снижения скорости движения транспортного средства, сравнивают текущие значения уровня инерционности с эталонными значением, осуществляют индикацию о превышении уровня инерционности тормозной системы в случае превышения текущего значения инерционности над эталонным значением, определяют начальные условия торможения путем определения скорости движения транспортного средства в момент начала торможения, определяют эталонные значения перегрузок для данных начальных условий торможения, сравнивают текущие значения перегрузок с эталонными значениями, выдают сигнал об исправности тормозной системы в случае превышения текущих значений перегрузки, определяют тормозной путь транспортного средства от момента снижения скорости до полной остановки транспортного средства.
Заявляемый способ реализуется в устройстве функционирования информационно-вычислительной системы, которое содержит устройство для измерения расстояния, пройденного автомобилем, состоящее из закрепленного на колесе датчика пути, счетчика пути, выполненного в виде генератора импульсов, схемы сравнения, программного переключателя, счетчика импульсов и индикатора, блока анализа условий движения, при этом выход датчика пути соединен через генератор импульсов с первым входом схемы сравнения, выход программного переключателя соединен со вторым входом схемы сравнения, выход которой через счетчик импульсов соединен с входом индикатора, блок анализа условий движения состоит из датчика линейных ускорений, элемента И-НЕ, первого и второго диодов, n-первых и вторых пороговых устройств и задатчика сигналов, причем выход датчика линейных ускорений одновременно соединен через элемент И-НЕ, первый и второй диоды соответственно с первым входом программного переключателя, первыми входами n-первых и вторых пороговых устройств, n-вторые входы которых соединены с n-выходами задатчиков сигналов, выходы n-первых и вторых пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя и в которое дополнительно введены контактный датчик нажатия на педаль тормоза, блок обработки информации, индикатор превышения уровня инерционности тормозной системы, индикатор исправности тормозной системы, индикатор тормозного пути транспортного средства, причем выход контактного датчика нажатия на педаль тормоза, первый, второй и группа третьих выходов блока измерений расстояний соединены соответственно с первым, вторым, третьим и группой четвертых входов блока обработки информации, первый, второй и третий выходы которого соединены соответственно с индикатором превышения уровня инерционности, индикатором исправности тормозной системы, индикатором тормозного пути транспортного средства.
Кроме того, блок обработки информации состоит из сдвигового регистра, генератора импульсов, первого и второго элемента И, первого и второго элемента И-НЕ, первого второго, третьего счетчиков, делителя, первого, второго и n-третьих ключей, триггера, дифференцирующей цепи, первого и второй группы n сравнивающих устройств, первого и второго задатчиков сигналов, первого и второго элементов ИЛИ, группы n-пороговых устройств, причем первый, второй и группа третьих входов блока обработки информации являются соответственно первыми входами сдвигового регистра, делителя, второго ключа, триггера и одновременно входом дифференцирующей цепи, группой n-входов первого элемента ИЛИ, выход дифференцирующей цепи соединен со вторыми входами триггера, сдвигового регистра, первого, второго и третьего счетчика, выход генератора импульсов соединен с третьим входом сдвигового регистра и со вторыми входами первого и второго элементов И, первые и третьи входы которых соединены соответственно с первым выходом сдвигового регистра и выходом триггера, выходами первого и второго элементов И-НЕ, входы которых соединены соответственно со вторым выходом сдвигового регистра и выходом первого элемента ИЛИ, выход которого соединен одновременно со вторыми входами группы n-пороговых устройств и первым входом первого ключа, второй вход которого соединен с выходом делителя, второй вход которого через счетчик соединен с выходом первого элемента И, выход второго элемента И через второй счетчик соединен с первым входом сравнивающего устройства, второй вход которого соединен с выходом первого задатчика сигналов, выход первого ключа соединен одновременно со вторым входом второго ключа и первыми входами группы n-вторых сравнивающих устройств, вторые входы которых соединены с n-первыми выходами второго задатчика сигнала, выходы группы n-вторых сравнивающих устройств соединены с первыми входами группы n-третьих ключей, вторые входы которых соединены со второй группой выходов второго задатчика сигналов, выходы n-третьих ключей соединены с первыми входами группы n-пороговых устройств, выходы которых соединены с группой входов второго элемента ИЛИ, выход второго ключа соединен с первым входом третьего счетчика, выход первой схемы сравнения, выход третьего счетчика и выход второго элемента ИЛИ являются соответственно первым, вторым и третьим выходами блока обработки информации.
Новыми признаками, обладающими существенными отличиями по способу, являются следующие совокупности действий.
1. Определяют уровень инерционности системы торможения путем определения временного интервала между моментом времени нажатия на педаль тормоза и моментом времени начала снижения скорости движения транспортного средства.
2. Сравнивают текущие значения уровня инерционности с эталонными значениями.
3. Осуществляют индикацию о превышения уровня инерционности тормозной системы в случае превышения текущего значения инерционности относительно эталонного.
4. Определяют начальные условия торможения путем определения скорости движения транспортного средства в момент начала торможения.
5. Определяют эталонные значения перегрузок для данных начальных условий торможения.
6. Сравнивают текущие значения перегрузок с эталонными значениями.
7. Выдают сигнал об исправности тормозной системы в случае превышения текущих значений перегрузки.
8. Определяют тормозной путь транспортного средства от момента снижения скорости до полной остановки транспортного средства.
Существенными отличительными признаками по устройству являются контактный датчик нажатия на педаль тормоза, блок обработки информации, индикатор превышения уровня инерционности тормозной системы, индикатор исправности тормозной системы, индикатор тормозного пути транспортного средства и новые связи между элементами устройства.
На фиг.1 показана структурная схема устройства, реализующая предлагаемый способ, на фиг.2 - то же, блока анализа условий движения автомобиля, на фиг.3 - то же, блока обработки информации.
Устройство функционирования информационно-вычислительной системы содержит блок 1 измерения расстояния, пройденного автомобилем, блок 2 обработки информации, индикатор 3 превышения уровня инерционности тормозной системы, индикатор 4 исправности тормозной системы, индикатор 5 тормозного пути транспортного средства, контактный датчик 6 нажатия на педаль тормоза. Блок 1 измерения расстояния состоит из закрепленного на колесе датчика 7 пути, счетчика 8 пути, блока 9 анализа условий движения, при этом счетчик 8 пути выполнен в виде генератора 10 импульсов, схемы 11 сравнения, программного переключателя 12, счетчика 13 импульсов и индикатора 14. Блок 9 анализа условий движения состоит из датчика 15 линейных ускорений, элемента 16 И-НЕ, первого 17 и второго 18 диодов, n-первых 19 и вторых 20 пороговых устройств, задатчика 21 сигналов. Выход датчика 7 пути соединен через генератор 10 импульсов с первым входом схемы 11 сравнения, выход программного переключателя 12 соединен со вторым входов схемы 11 сравнения, выход которой через счетчик 13 импульсов соединен с входом индикатора 14, выход датчика 15 линейных ускорений одновременно соединен через элемент 16 И-НЕ, первый 17 и второй 18 диоды соответственно с первым входом программного переключателя 12, первыми входами n-первых 19 и вторых 20 пороговых устройств, n-вторые входы которых соединены с n-выходами задатчиков 21 сигналов, выходы n-первых 19 и вторых 20 пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя 12, выход счетчика 13 импульсов и выходы вторых 20 пороговых устройств являются соответственно первым и n-третьими выходами блока измерений расстояний, выход контактного датчика 6 нажатия на педаль тормоза, первый выход и группа третьих выходов блока 1 измерений расстояний соединены соответственно с первым, вторым, и n-третьими входами блока 2 обработки информации, первый, второй и третий выходы которого соединены соответственно с индикатором 3 превышения уровня инерционности, индикатором 4 исправности тормозной системы, индикатором 5 тормозного пути транспортного средства.
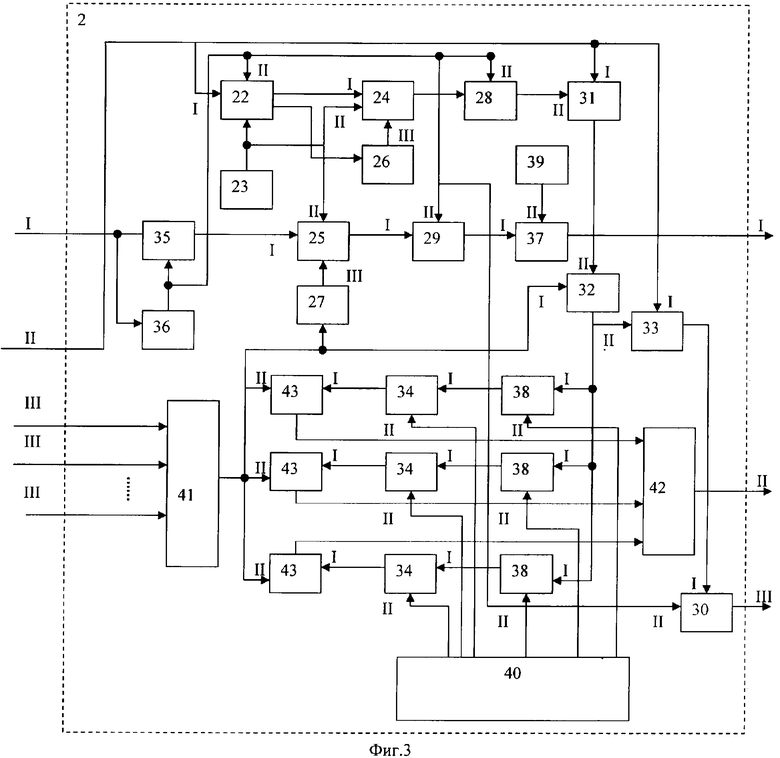
Блок 2 обработки информации состоит из сдвигового регистра 22, генератора 23 импульсов, первого 24 и второго 25 элементов И, первого 26 и второго 27 элементов И-НЕ, первого 28, второго 29, третьего 30 счетчиков, делителя 31, первого 32, второго 33 и n-третью 34 группу ключей, триггера 35, дифференцирующей цепи 36, первого 37 и n-второй 38 группы сравнивающих устройств, первого 39 и второго 40 задатчиков сигналов, первого 41 и второго 42 элементов ИЛИ, n-группы пороговых устройств 43. Первый, второй и n-третьи входы блока 2 обработки информации являются соответственно входами триггера 35 и одновременно входом дифференцирующей цепи 36, первыми входами сдвигового регистра 22, делителя 23, второго 24 ключа и группой входов первого 41 элемента ИЛИ. Выход дифференцирующей цепи 36 соединен со вторыми входами триггера 35, сдвигового регистра 22, первого 28, второго 29 и третьего 30 счетчиков. Выход генератора 23 импульсов соединен с третьим входом сдвигового регистра 22 и со вторыми входами первого 24 и второго 25 элементов И, первые и третьи входы которых соединены соответственно с первым выходом сдвигового регистра 22 и выходом триггера 35, выходами первого 26 и второго 27 элементов И-НЕ, входы которых соединены соответственно со вторым выходом сдвигового регистра 22 и выходом первого 41 элемента ИЛИ, выход которого соединен одновременно со вторыми входами n-группы 43 пороговых устройств и первым входом первого 32 ключа, второй вход которого соединен с выходом делителя 31, второй вход которого через счетчик 28 соединен с выходом первого 24 элемента И. Выход второго 25 элемента И через второй 29 счетчик соединен с первым входом сравнивающего устройства 37, второй вход которого соединен с выходом первого 39 задатчика сигналов, выход первого 32 ключа соединен одновременно со вторым входом второго 33 ключа и первыми входами группы n-вторых 38 сравнивающих устройств, вторые входы которых соединены с n-первыми выходами второго 40 задатчика сигнала, выходы n-вторых 38 сравнивающих устройств соединены с первыми входами n-третьих 34 ключей, вторые входы которых соединены с n-вторыми выходами второго 40 задатчика сигналов. Выходы n-третьих 34 ключей соединены с первыми входами n-пороговых устройств 43, выходы которых соединены с n-входами второго 42 элемента ИЛИ. Выход второго 33 ключа соединен с первым входом третьего 30 счетчика. Выход первой 37 схемы сравнения, выход второго 42 элемента ИЛИ и выход третьего 30 счетчика являются соответственно первым, вторым и третьим выходами блока 2 обработки информации.
Устройство работает следующим образом.
В процессе движения транспортного средства происходит измерение пройденного расстояния.
Датчик 7 оборотов колеса пропорционально пройденному пути автомобиля вырабатывает импульсы, каждый последующий из которых - результат единичного приращения пути. Импульсы с датчика 7 пути запускают высокочастотный генератор 10. Когда число импульсов, выработанных генератором 10, станет равным значению, установленному на программном переключателе 12, схема 11 сравнения остановит генератор 10. В результате сформируется пачка высокочастотных импульсов. Счетчик 13 импульсов прибавит к предыдущему значению число, равное единичному приращению пути (число, установленное программным переключателем). Значение единичного приращения пути подается на индикатор 14. Оно в цифровом виде отображает пройденный путь (фиг.1).
Блок 9 анализа условий движения автомобиля осуществляет коррекцию единичного приращения пути на основе анализа знака и величины ускорения от датчика 15 линейных ускорений (фиг.2).
Если с выхода датчика 15 линейных ускорений сигнал отсутствует, то с выхода элемента И-НЕ 16 сигнал поступает на первый вход программного переключателя 12.
Если с выхода датчика 15 линейных ускорений поступает сигнал, то определение знака линейного ускорения осуществляется первым 17 прямо и вторым 18 обратно включенными диодами. С выхода диодов (17, 18) в зависимости от знака сигнал поступает на n-входы первых 19 или вторых 20 пороговых устройств.
Пороговые устройства (19, 20) осуществляют анализ величины ускорения на основе сравнения текущих значений, поступающих с выхода диодов (17, 18), с заданными, поступающими от задатчика 21 сигналов.
С выхода пороговых устройств 19, 20 сигналы поступают соответственно на вторые и третьи n-входы программного переключателя 12.
Блок 2 обработки информации обеспечивает определение уровня инерционности и оценки состояния тормозной системы, а также измерения тормозного пути следующим образом.
В момент начала торможения транспортного средства сигналы с выхода контактного датчика 6 нажатия на педаль тормоза с первого выхода и группа третьих выходов блока 1 измерений расстояний поступают соответственно на первый, второй и n-третьи входы блока 2 обработки информации.
При этом происходит поступление сигналов соответственно на входы триггера 35 и одновременно на входы дифференцирующей цепи 36, первые входы сдвигового регистра 22, делителя 23, второго 24 ключа и n-входы первого 41 элемента ИЛИ (фиг.3).
С выхода дифференцирующей цепи 36 сигнал обнуления поступает на вторые входы триггера 35, сдвигового регистра 22, первого 28, второго 29 и третьего 30 счетчиков. Таким образом, обеспечивается готовность блока 2 обработки информации к началу измерений.
С выхода генератора 23 импульсов импульсы поступают на третий вход сдвигового регистра 22 и на вторые входы первого 24 и второго 25 элементов И, на первые и третьи входы которых поступают сигналы соответственно с первого выхода сдвигового регистра 22 и выхода триггера 35, выхода первого 26 и второго 27 элементов И-НЕ, обеспечивая тем самым прохождение импульсов от генератора 23 импульсов на первый 28 и второй 29 счетчики.
Сигнал с выхода первого 28 счетчика поступает на второй вход делителя 31, на первый вход которого поступает сигнал, пропорциональный пути, проходимому транспортным средством, на выходе делителя 31 формируется сигнал пропорциональный скорости движения транспортного средства, который подается на первый вход первого 31 ключа.
На выходе счетчика 29 формируется сигнал, пропорциональный временному интервалу от момента нажатия на педаль тормоза до момента времени уменьшения скорости движения, прекращение подсчета импульсов осуществляется в момент времени выдачи сигнала с выхода второго 41 элемента ИЛИ на вход второго 27 элемента И-НЕ.
С выхода второго 29 счетчика сигнал поступает на первый вход первого 37 сравнивающего устройства, на второй вход которого поступает сигнал с выхода первого 39 задатчика сигналов.
Если сигнал с выхода второго 29 счетчика превышает уровень сигнала с выхода первого 39 задатчика сигналов, то сигнал с выхода первого 37 сравнивающего устройства поступает на вход индикатора 3 превышения уровня инерционности тормозной системы.
Сигнал с выхода первого 41 элемента ИЛИ поступает одновременно на вторые входы n-группы 43 пороговых устройств и первый вход первого 32 ключа. Это обеспечивает выдачу сигнала, пропорционального начальной скорости движения транспортного средства в момент торможения, одновременно на второй вход второго 33 ключа и первые входы n-вторых 38 сравнивающих устройств, на вторые входы которых поступают сигналы с n-первых выходов второго 40 задатчика сигналов.
Сравнивающие устройства 38 обеспечивают определение начальной скорости торможения транспортного средства на основе сравнения текущих значений скорости с заданными значениями.
Сигнал с выхода одного из n-вторых 38 сравнивающих устройств поступает на первый вход одного из n-третьих 34 ключей, на второй вход которого поступает сигнал с одного из n-вторых выходов второго 40 задатчика сигналов. С выхода одного из n-третьих 34 ключей эталонный сигнал поступает на первый вход одного из n-пороговых устройств 43, на второй вход которого поступает сигнал с выхода элемента ИЛИ 31.
В случае превышения уровня текущей перегрузки относительно эталонного значения в момент нажатия на педаль тормоза, происходит выдача сигнала с выхода одного из n-пороговых устройств через второй элемент ИЛИ на индикатор исправности тормозной системы транспортного средства.
Сигнал с выхода второго 33 ключа поступает на первый вход третьего 30 счетчика, обеспечивая тем самым формирование сигнала тормозного пути за счет поступления информации о пройденном пути транспортным средством с первого выхода блока измерения расстояний.
Таким образом, наряду с информацией о пройденном расстоянии транспортным средством, осуществляется оценка уровня инерционности, оценка исправности тормозной системы, а также измерение тормозного пути транспортного средства.
Источники информации
1. SU 1303827 А1 (СИБИРСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ГЕОЛОГИИ, ГЕОФИЗИКИ И МИНЕРАЛЬНОГО СЫРЬЯ) 15.04.1987.
2. RU 2037779 C1 (Сибирский научно-исследовательский институт геологии, геофизики и минерального сырья) 19.06.1995.
3. RU 20577 U1 (Сибирский научно-исследовательский институт геологии, геофизики и минерального сырья) 10.11.2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342644C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2007 |
|
RU2326407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2331046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2453454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326363C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОЙ ВИБРАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308006C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2320970C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2331533C1 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 2006 |
|
RU2303245C1 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 2004 |
|
RU2279645C2 |

Изобретение относится к области измерительной техники и может применяться для информационного обеспечения водителя при эксплуатации наземного транспортного средства. Технической результат - повышение информативности. Для достижения данного результата определяют уровень инерционности системы торможения путем определения временного интервала между моментом времени нажатия на педаль тормоза и моментом времени начала снижения скорости движения транспортного средства. Сравнивают текущие значения уровня инерционности с эталонным значением. Осуществляют индикацию о превышении уровня инерционности тормозной системы в случае превышения текущего значения над эталонным. Определяют начальные условия торможения путем определения скорости движения транспортного средства в момент начала торможения, определяют эталонные значения перегрузок для данных начальных условий торможения. Сравнивают текущие значения перегрузок с эталонными. Выдают сигнал об исправности тормозной системы в случае превышения текущих значений перегрузки. Определяют тормозной путь транспортного средства от момента снижения скорости до полной остановки транспортного средства. 2 н. и 1 з.п. ф-лы, 3 ил.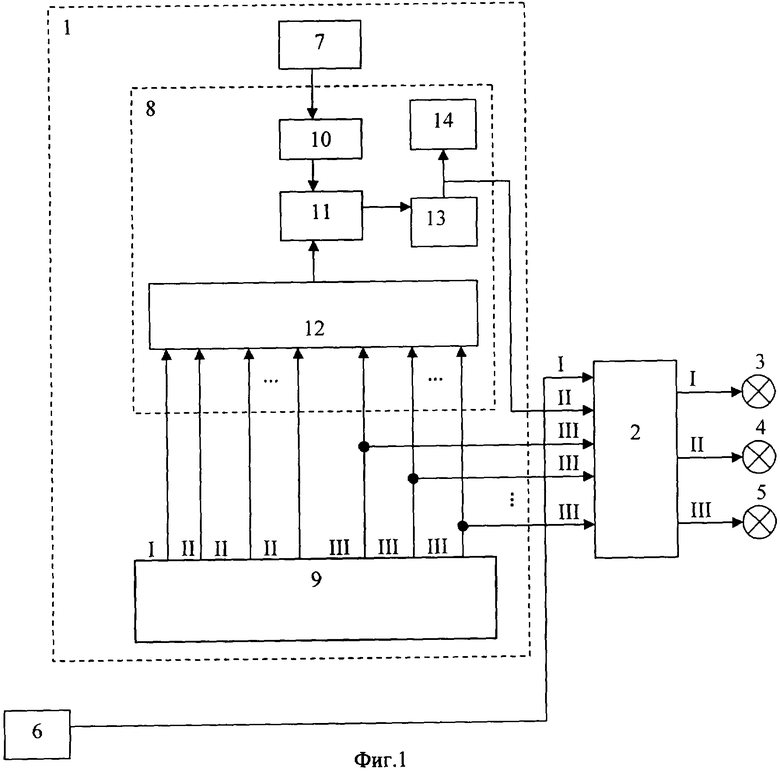
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ | 1993 |
|
RU2037779C1 |
| ВЕТРЯНЫЙ ДВИГАТЕЛЬ | 1930 |
|
SU20577A1 |
| Полевой В.А | |||
| Работа с трехкоординатным топопривязчиком | |||
| - М.: Недра, 1978, с.23-24 | |||
| Устройство для измерения расстояний | 1981 |
|
SU977956A2 |

