ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется по заявке на патент Кореи №2005-80977, которая подана 31 августа 2005 года и описание которой целиком включено в данный документ посредством ссылки. Данную заявку можно также отнести к американским заявкам №11/336,979, поданным 23 января 2006 года, описание которых включено в данный документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
Данное изобретение относится к роботу-пылесосу, который может самостоятельно перемещаться и осуществлять чистку. В частности, данное изобретение относится к системе и способу возвращения робота-пылесоса с аккумуляторной батареей к зарядному устройству.
Описание уровня техники
Как правило, робот-пылесос осуществляет чистку при перемещении за счет всасывания с поверхности пыли, грязи и другого мусора (собирательно называемых «грязью»). Такой робот-пылесос способен определять расстояние до препятствия, находящегося поблизости, как, например, предмет мебели, офисная техника, стена или тому подобное. Благодаря определению расстояния между объектами робот-пылесос может избежать столкновения с указанными препятствиями. Однако может случиться так, что робот-пылесос может не обнаружить зарядное устройство или его батарея разрядится до того, как он достигнет зарядного устройства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение разработано соответственно для решения вышеуказанных проблем. Таким образом, первый аспект данного изобретения состоит в разработке системы возвращения робота к зарядному устройству, которая содержит передатчик сигналов самонаведения, включающий по меньшей мере первое, второе и третье сигнальные передающие устройства, каждое из которых установлено на передней стенке зарядного устройства и предназначено для передачи соответствующих сигналов, отличающихся друг от друга по меньшей мере одним из следующих параметров: кодом или дальностью передачи, и четвертое сигнальное передающее устройство, установленное по меньшей мере на одной боковой стенке зарядного устройства и предназначенное для передачи сигнала, код которого отличается от кодов сигналов первого, второго и третьего передающих устройств; приемник сигналов системы самонаведения, установленный в роботе и принимающий по меньшей мере один сигнал, передаваемый от передатчика сигналов самонаведения; и устройство управления, распознающее указанный по меньшей мере один сигнал и управляющее роботом с обеспечением возвращения его к зарядному устройству, основываясь по меньшей мере частично на указанном по меньшей мере одном сигнале.
Другой аспект данного изобретения состоит в разработке способа возвращения робота к зарядному устройству, включающего обнаружение роботом сигнала команды возврата; прием по меньшей мере одного инфракрасного сигнала, переданного от зарядного устройства; определение местонахождения зарядного устройства, основываясь по меньшей мере частично на по меньшей мере одном инфракрасном сигнале; и стыковку с зарядным устройством, давая, таким образом, возможность роботу выполнить зарядку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изложенные выше аспекты и характерные признаки данного изобретения станут более понятными из описания иллюстративных неограничивающих вариантов выполнения данного изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг.1А-1D представляют собой схемы, изображающие иллюстративные способы возвращения робота-пылесоса к зарядному устройству;
фиг.2 представляет собой схему, изображающую систему возвращения робота-пылесоса к зарядному устройству, выполненную в соответствии с данным изобретением;
фиг.3 представляет собой вид в аксонометрии робота-пылесоса, изображенного на фиг.2;
фиг.4 представляет собой диаграмму, показывающую алгоритм возвращения робота-пылесоса к зарядному устройству, выполненный в соответствии с неограничивающим вариантом выполнения данного изобретения;
фиг.5А-5В представляют собой вертикальную проекцию вида спереди и вид сверху зарядного устройства, изображенного на фиг.2;
фиг.6 представляет собой схематичное изображение расстояний и углов передачи сигнала передатчика сигналов самонаведения, выполненного в соответствии с неограничивающим вариантом выполнения данного изобретения;
фиг.7 иллюстрирует способ возвращения робота-пылесоса к зарядному устройству, выполненный в соответствии с неограничивающим вариантом выполнения данного изобретения;
фиг.8 представляет собой блок-схему этапа самонаведения, изображенного на Фиг.7;
фиг.9-11 иллюстрируют этап стыковки способа возвращения робота-пылесоса к зарядному устройству в соответствии с неограничивающим вариантом выполнения данного изобретения; и
фиг.12 представляет собой блок-схему, изображающую иллюстративный этап стыковки, проиллюстрированный на фиг.9-11.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже со ссылкой на прилагаемые чертежи подробно описаны типичные варианты выполнения данного изобретения. В приведенном ниже описании одинаковые номера позиций относятся к одинаковым элементам.
Робот-пылесос может быть выполнен с источником питания, таким как батарея (например, аккумуляторная батарея). Для подзарядки аккумуляторной батареи система может дополнительно содержать зарядное устройство (например, внешнее зарядное устройство), к которому может возвращаться робот-пылесос.
При необходимости подзарядки для того, чтобы возвратиться к зарядному устройству, робот-пылесос определяет местонахождение зарядного устройства. Робот-пылесос предпочтительно может также определять и местонахождение зарядных клемм для совмещения их с соединительными клеммами робота.
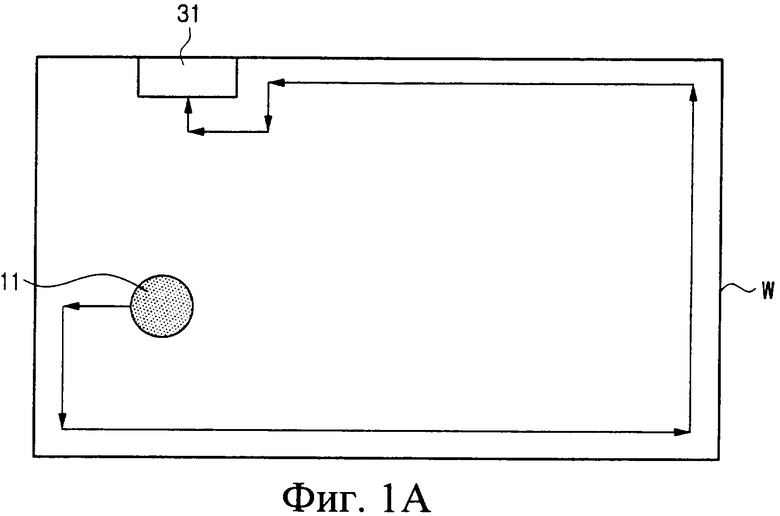
На фиг.1А проиллюстрирован неограничивающий способ, который может быть использован для возвращения робота-пылесоса к зарядному устройству. При обнаружении сигнала запроса подзарядки робот-пылесос 11 может подойти к стене W и перемещаться вдоль нее. Если при перемещении робота-пылесоса 11 вдоль стены W им обнаружен датчик (например, магнитный датчик), который может быть предусмотрен на зарядном устройстве 31, то робот может распознать его как зарядное устройство и попытаться пристыковаться к нему. Несмотря на то, что такой способ требует незначительного программирования робота, иногда он требует длительного времени перемещения робота. В результате батарея робота-пылесоса может разрядиться до того, как он достигнет зарядного устройства.
На фиг.1В проиллюстрирован другой иллюстративный способ, с помощью которого во время перемещения вдоль стены W робот-пылесос 12 может обнаружить зарядное устройство 32 и возвратиться к нему, используя датчик (например, датчик инфракрасного излучения), и может пристыковаться к зарядному устройству 32. Робот-пылесос 12 может произвольно перемещаться и определять область действия инфракрасного излучения А1. Зарядное устройство 32 может испускать инфракрасный свет, создавая область инфракрасного излучения А1. При обнаружении инфракрасного излучения робот-пылесос 12 может подойти к стене W, перемещаться вдоль нее и пристыковаться к зарядному устройству 32. Согласно указанному способу робот-пылесос 12 может легко подойти к зарядному устройству 32, если обнаружит область инфракрасного излучения А1. Однако при произвольном перемещении робота для обнаружения области инфракрасного излучения А1 может потребоваться слишком много времени, поскольку эта область может быть очень узкой. Кроме того, случается, что стыковка происходит неверно.
На фиг.1C проиллюстрирован следующий способ направления робота-пылесоса 13 к зарядному устройству 33 за счет использования датчика инфракрасного излучения, находящегося на зарядном устройстве 33. В отличие от способа, проиллюстрированного на фиг.1В, способ, проиллюстрированный на фиг.1C, позволяет легко выполнить операцию стыковки, поскольку область инфракрасного излучения А2 находится рядом с зарядным устройством 33. Однако, поскольку область инфракрасного излучения А2 также может быть очень узкой, то для ее обнаружения роботу-пылесосу также может потребоваться много времени.
На фиг.1D проиллюстрирован еще один неограничивающий способ обнаружения зарядного устройства. Согласно этому способу площадь желаемой чистки и местоположение зарядного устройства могут быть сохранены в памяти робота-пылесоса 14 (например, в виде карты изображений). В данном случае робот-пылесос 14 может возвратиться к зарядному устройству 34, как только обнаружит сигнал запроса подзарядки. Однако создание памяти или процессоров для обработки видеоинформации может оказаться экономически невыгодным или нежелательным.
Как видно из фиг.2-4, робот-пылесос 100 может содержать корпус 110, приемник 120 сигналов системы самонаведения, по меньшей мере одну соединительную клемму 130, аккумуляторную батарею 140, датчик 150 зарядки батареи, датчик 160 расстояния и угла и устройство 210 управления.
Приемник 120 сигналов системы самонаведения может быть выполнен на передней стенке корпуса 110 для того, чтобы указанный приемник мог принимать по меньшей мере один сигнал, посланный передатчиком 320 сигналов самонаведения. Приемник 120 выполнен с возможностью обмена сигналами с устройством 210 управления. Несмотря на то, что местоположение приемника 120 не ограничено, предпочтительно, чтобы он был установлен в центральной части передней стенки корпуса 110, как показано на фиг.3, для более эффективного приема сигналов, переданных передатчиком 320.
Соединительные клеммы 130 могут быть установлены на передней поверхности корпуса 110 в положении, позволяющем эффективное подключение зарядных клемм 330 зарядного устройства 300. Предпочтительно, чтобы соединительные клеммы 130 были выполнены парами. Кроме того, желательно, чтобы соединительные клеммы были симметричны относительно приемника 120.
Аккумуляторная батарея 140 может быть установлена на корпусе 110 и подключена к соединительным клеммам 130. Если соединительные клеммы 130 подключены к зарядным клеммам 330 зарядного устройства 300, то можно осуществить подзарядку аккумуляторной батареи 140.
Датчик 150 заряда батареи может определять оставшийся заряд аккумуляторной батареи 140. Датчик 150 заряда батареи может быть выполнен с возможностью обмена сигналами с устройством 210 управления так, что если уровень заряда меньше желаемого, то датчик 150 может послать в устройство 210 управления сигнал запроса подзарядки.
Датчик 160 расстояния и угла может определять по меньшей мере одно значение расстояния и угла между роботом-пылесосом 100 и зарядным устройством 300 при подходе робота-пылесоса 100 к зарядному устройству 300. Датчик 160 может передавать сигналы к зарядному устройству 300 и принимать сигналы от указанного устройства. Конструкция датчика 160 позволяет ему обмениваться сигналами с устройством управления 210, а при получении сигнала от зарядного устройства 300 послать сигнал к устройству управления.
Несмотря на то, что в качестве датчика 160 можно использовать несколько типов датчиков, с которыми знакомы специалисты в данной области техники, предпочтительно применять датчики инфракрасного излучения. Датчики инфракрасного излучения относительно недороги и просты в обращении. В качестве неограничивающего примера данного изобретения датчик 160 может быть оснащен одним или несколькими приборами инфракрасного излучения и приемником инфракрасного излучения. В соответствии с неограничивающим аспектом данного изобретения предпочтительно, чтобы датчик 160 содержал первый и второй датчики 161 и 162 определения расстояния и угла, которые могут быть расположены слева и справа. Первый и второй датчики 161 и 162 могут быть симметричны друг другу относительно центральной части передней стенки корпуса 110. То есть, первый и второй датчики 161 и 162 могут быть расположены слева и справа симметрично относительно приемника сигналов 120 системы самонаведения, как показано на фиг.3.
Если робот-пылесос 100 подходит к зарядному устройству 300 и пытается пристыковаться к нему так, что по меньшей мере одна соединительная клемма 130 робота-пылесоса 100 соединяется с по меньшей мере одной зарядной клеммой 330 зарядного устройства 300, то по меньшей мере один из датчиков 161, 162 определяет расстояние до зарядного устройства 300. По меньшей мере один из датчиков 161, 162 может иметь необходимую дальность обнаружения. Например, значение указанной дальности от зарядного устройства 300 можно установить примерно в диапазоне 10 см. Как только робот-пылесос 100 входит в заданную область, один из датчиков 161, 162 может послать и/или принять сигналы инфракрасного излучения к/от зарядного устройства 300.
Приводной узел 170 может иметь колеса (не показаны), установленные на одной или обеих сторонах корпуса 110, и двигатель (не показан), предназначенный для приведения в действия колес. Таким образом, двигатель может приводить в движение колеса в соответствии с сигналами управления, полученными от устройства 210 управления так, что указанные колеса могут вращаться в прямом или обратном направлении независимо друг от друга и с разной скоростью вращения. Следовательно, робот-пылесос 100 может поворачивать направо и налево и передвигаться вперед и назад.
Хотя это не показано на чертежах, робот-пылесос 100 может иметь всасывающий узел, предназначенный для втягивания пыли с очищаемой поверхности, датчик обнаружения препятствий, предназначенный для обнаружения препятствий на пути робота-пылесоса 100, датчик определения пройденного пути, а также другие датчики, с которыми знакомы специалисты в данной области техники.
Устройство 210 управления может быть выполнено с целью управления узлами робота-пылесоса 100 так, что робот может осуществлять операцию чистки. Когда операция чистки не выполняется, устройство 210 управления может оставить робот-пылесос 100 в зарядном устройстве 300 с тем, чтобы аккумуляторная батарея 140 оставалась заряженной.
Как видно из фиг.4, устройство 210 управления может содержать узел 220 селекции сигналов и вычислительное устройство 230 для расчета расстояния и угла. Узел 220 способен различать сигналы инфракрасного излучения, полученные приемником 120 сигналов системы самонаведения, и может испускать коды управления или цифровые сигналы, соответствующие выбранным сигналам. Коды управления или цифровые сигналы можно заранее ввести в узел 220. Используя выходные сигналы, устройство 210 управления может управлять приводным узлом 170.
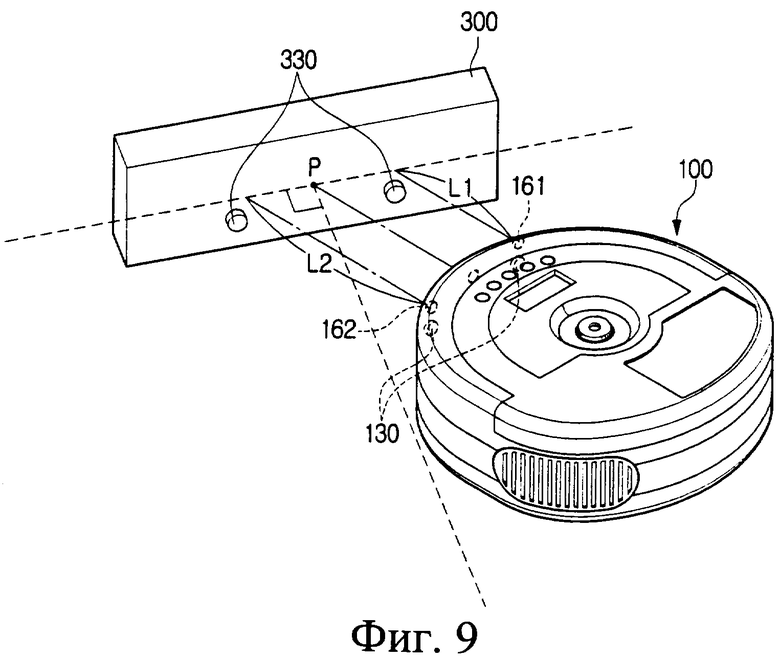
Вычислительное устройство 230 для расчета расстояния и угла способно рассчитать дальность и угол между роботом-пылесосом 100 и зарядным устройством 300, используя сигналы, переданные от датчика 160 расстояния и угла. Согласно данному неограничивающему варианту выполнения расстояние от по меньшей мере одного из первого и второго датчиков 161 и 162 определения расстояния до зарядного устройства 300 можно определить, используя сигналы, которые переданы соответственно от первого и второго датчиков 161 и 162 определения расстояния. То есть, поскольку скорость распространения сигналов инфракрасного излучения постоянна, можно вычислить расстояния от первого и второго датчиков 161 и 162 определения расстояния до зарядного устройства 300 путем вычисления количества времени, прошедшего с момента, когда по меньшей мере один из указанных датчиков передает сигнал, до момента, когда соответствующий сигнал принят по меньшей мере одним из них. Кроме того, вычислительное устройство 230 для расчета расстояния и угла может определить взаимное местоположение робота-пылесоса 100 и зарядного устройства 300 и вычислить угол между ними, используя разность расстояний L1 от первого датчика 161 до зарядного устройства 300 и L2 от второго датчика 162 до зарядного устройства 300 (см. фиг.10).
Используя сигналы, выделенные узлом 220 селекции сигналов, устройство 210 управления может привести в движение приводной узел 170 так, что робот-пылесос 100 может вернуться к зарядному устройству 300. В то же время, используя значения расстояния и угла, рассчитанные вычислительным устройством 230 для расчета расстояния и угла, устройство 210 управления может так управлять приводным узлом, что при стыковке соединительные клеммы 130 робота-пылесоса 100 могут быть быстро и точно присоединены к зарядным клеммам 330 зарядного устройства 300.
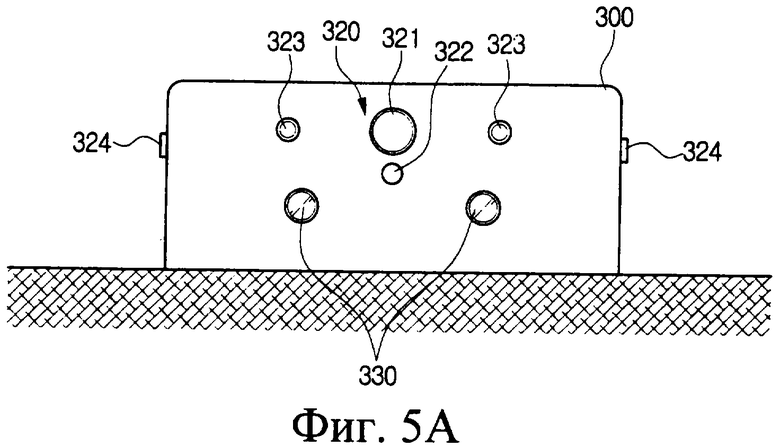
Как видно из фиг.5А и 5В, зарядное устройство 300 может быть выполнено с передатчиком 320 сигналов самонаведения и с зарядными клеммами 330. Зарядные клеммы 330 могут быть присоединены к шнуру 301 питания (см. фиг.2) через внутренний трансформатор, преобразователь и силовой кабель. Зарядные клеммы 330 могут быть присоединены (например, вставить) к соединительным клеммам 130 робота-пылесоса 100 (см. фиг.3) для подачи электропитания к аккумуляторной батарее 140. Зарядные клеммы 330 могут быть установлены в зарядном устройстве 300 примерно на той же высоте, что и соединительные клеммы 130. Однако другие конструкции, с которыми знакомы специалисты в данной области техники, также не выходят за пределы правовой охраны данного изобретения.
Передатчик 320 сигналов самонаведения может содержать первый, второй, третий и четвертый передатчики 321, 322, 323 и 324 сигналов. Поскольку с первого по четвертый передатчики 321-324 передают сигналы, которые могут отличаться друг от друга кодом, то узел селекции сигналов может распознавать соответствующие сигналы, переданные с первого по четвертый передатчиками 321-324 сигналов. С первого по третий передатчики 321-323 могут быть выполнены на передней стенке зарядного устройства 300, а четвертый передатчик 324 может быть выполнен на боковой стороне зарядного устройства 300. Согласно данному неограничивающему варианту выполнения, с первого по четвертый передатчики 321-324 сигналов содержат приборы инфракрасного излучения, такие как инфракрасные светоизлучающие диоды (СИДы). В этом случае в приемнике 120 сигналов системы самонаведения может быть использован приемник инфракрасного излучения. За счет использования приборов инфракрасного излучения и приемника инфракрасного излучения можно создать сравнительно недорогую систему возвращения робота-пылесоса к зарядному устройству.
Несмотря на то, что могут быть предусмотрены несколько приемников 120 сигналов системы самонаведения, которые соответствуют первому и второму передатчикам сигналов, соответственно 321 и 322, предпочтительнее создать один приемник 120 сигналов, который может принимать все сигналы, переданные от первого-четвертого передатчиков 321-324 сигналов. Использование одного приемника 120 сигналов системы самонаведения может уменьшить затраты и сократить площадь, необходимую для установки приемника сигналов. Таким образом, предпочтительно, чтобы с первого по четвертый передатчики 321-324 сигналов передавали сигналы инфракрасного излучения примерно одной частоты.
Как видно из фиг.6, сигналы инфракрасного излучения, которые могут быть переданы от каждого из первого, второго и третьего 321, 322 и 323 передатчиков сигналов, могут отличаться друг от друга углом передачи и дальностью передачи сигнала.
Цель данного изобретения заключается в создании робота-пылесоса 100, способного принять сигналы инфракрасного излучения и быстро приблизиться к зарядному устройству, используя эти сигналы.
Если говорить более подробно, то сигналы инфракрасного излучения могут отличаться количеством импульсов высокого и низкого напряжения в секунду, проходящих в сигнале друг за другом. Например, первый передатчик может посылать сигнал, содержащий три импульса высокого напряжения, чередующихся с тремя импульсами низкого напряжения, а второй передатчик может посылать сигнал, содержащий четыре импульса высокого напряжения, чередующихся с четырьмя импульсами низкого напряжения. Конечно, данный пример не является ограничением и возможны другие сигналы, не выходящие за пределы сущности данного изобретения. Для облегчения ссылки указанные сигналы упомянуты ниже, как сигналы, «отличающиеся кодами». Более того, желательно, чтобы сигналы инфракрасного излучения, переданные с первого по четвертый передатчиками 321-324 сигналов, были равномерно распространены над передней и боковой поверхностями зарядного устройства 300 так, чтобы робот-пылесос 100 мог принять сигналы инфракрасного излучения в любом месте рядом с зарядным устройством 300.
Расстояния передачи и углы передачи сигнала могут быть последовательно уменьшены по порядку от первого передатчика 321 сигналов ко второму передатчику 322 сигналов и к третьему передатчику 323 сигналов. В соответствии с неограничивающим аспектом данного изобретения предпочтительно установить такие углы и расстояния передачи сигнала, чтобы первый передатчик 321 сигналов имел угол передачи сигнала в диапазоне значений от 120° до 170°, а дальность передачи сигнала в диапазоне значений от 14 до 20 м; второй передатчик 322 сигналов имел угол передачи сигнала в диапазоне значений от 30° до 60°, а дальность передачи сигнала в диапазоне значений от 10 до 13 м; и третий передатчик 323 сигналов имел угол передачи сигнала в диапазоне значений от 10° до 20°, а дальность передачи сигнала в диапазоне значений от 1 до 2 м. Указанные значения дальностей передачи сигнала и углов передачи сигнала (или другие требуемые значения дальностей передачи сигнала и углов передачи сигнала) могут быть установлены в качестве стандартных при изготовлении передатчиков. Кроме того, используя ручки настройки, расположенные по меньшей мере на той стороне, где находятся с первого по третий передатчики 321-323 сигналов, возможно точно настроить угол передачи сигнала.
Для эффективного приема сигналов приемником 120 сигналов системы самонаведения, предпочтительно, чтобы первый и второй передатчики 321 и 322 были расположены в вертикальной плоскости в центральной части зарядного устройства 300 или вблизи нее. Кроме того, поскольку угол передачи сигнала и дальность передачи сигнала третьего передатчика 323 могут быть незначительны, то желательно, чтобы он состоял из двух сигнальных передатчиков. Эти передатчики могут быть расположены с противоположных боковых сторон зарядного устройства 300 симметрично друг другу относительно первого и второго передатчиков 321 и 322.
Возможная конструкция системы данного изобретения может содержать зарядное устройство, расположенное на стене. В данном случае робот-пылесос 100 может не обнаружить сигналы инфракрасного излучения, переданные с первого по третий передатчиками 321-323, во время его перемещения вдоль стены, на которой установлено зарядное устройство 300. Поэтому желательно, чтобы четвертый передатчик 324 состоял из двух сигнальных передатчиков, установленных на противоположных боковых стенках зарядного устройства 300. К тому же, четвертый передатчик 324 может передавать сигналы с кодом, отличающимся от кодов сигналов инфракрасного излучения, посланных первым-третьим передатчиками 321-323. Однако необязательно, чтобы угол передачи сигнала и дальность передачи сигнала четвертого передатчика 324 отличались от угла и расстояния передачи сигнала первого-третьего передатчиков 321-323. В соответствии с данным изобретением предпочтительно так установить четвертый передатчик 324, чтобы угол передачи его сигнала составлял примерно 60°, а дальность передачи сигнала составляла примерно 1 м.
В соответствии с другим неограничивающим вариантом выполнения робот-пылесос 100 может оставаться в режиме ожидания, в котором его соединительные клеммы 130 подключены к зарядным клеммам 330 зарядного устройства 300. При получении команды очистки, робот-пылесос 100 отделяется от зарядного устройства 300 и осуществляет очистку площади, заданной по меньшей мере одной из команд пользователя или заранее запрограммированной командой.
После завершения очистки или при получении во время операции очистки сигнала запроса подзарядки датчиком 150 заряда батареи устройство 210 управления может поменять режим работы робота-пылесоса 100 на режим возврата с тем, чтобы робот-пылесос 100 возвратился к зарядному устройству 300. Таким образом, устройство 210 управления может так управлять роботом-пылесосом 100, что робот будет перемещаться из своего местонахождения, принимая сигналы, посланные передатчиком 320 сигналов самонаведения, расположенным в зарядном устройстве 300. Например, робот-пылесос 100 может перемещаться зигзагообразно, произвольно, или вдоль стены W (на которой расположено зарядное устройство 300) до тех пор, пока сигналы инфракрасного излучения, посланные передатчиком 320 сигналов самонаведения, принимаются приемником 120 сигналов системы самонаведения.
Иллюстративный способ возвращения и стыковки робота-пылесоса 100 с зарядным устройством 300 можно разделить на два этапа: этап самонаведения (во время которого робот-пылесос 100 наводится на зарядное устройство 300) и этап стыковки (во время которого соединительные клеммы 130 робота-пылесоса 100 подключаются к зарядным клеммам 330 зарядного устройства 300).
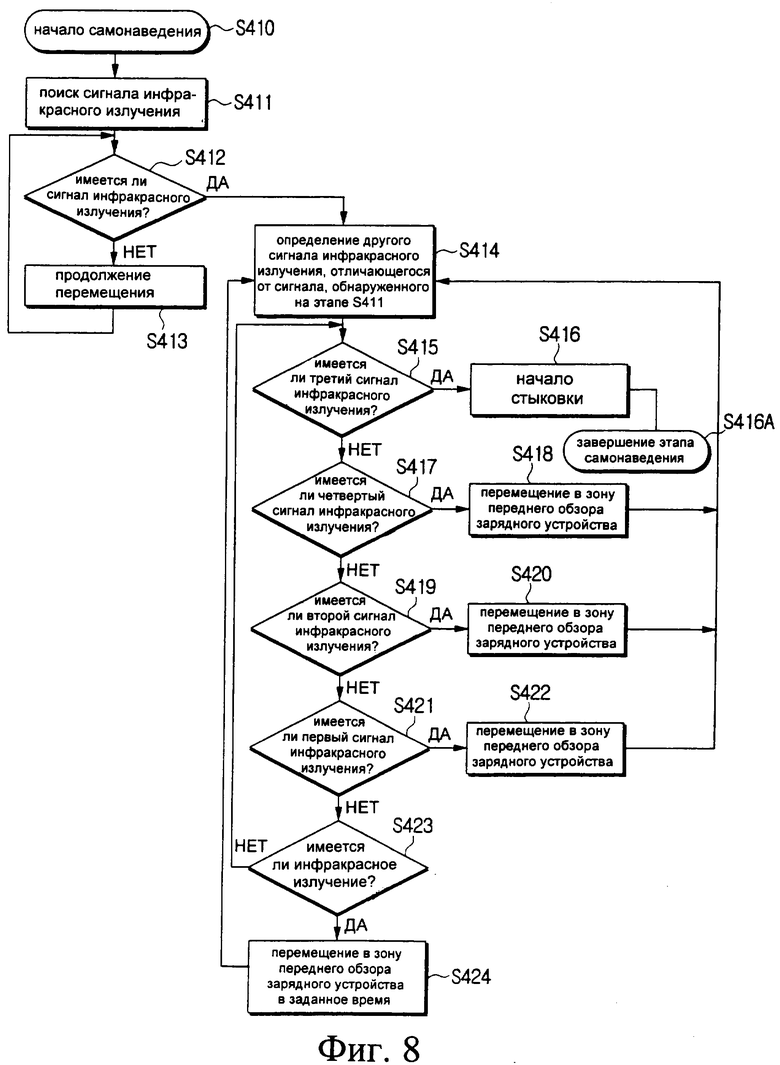
Этап самонаведения описан со ссылкой на фиг.7 и 8. Робот-пылесос 100 начинает самонаведение (S410) и, передвигаясь, ведет поиски сигнала инфракрасного излучения (S411). Робот-пылесос 100 может постоянно перемещаться до тех пор, пока приемник 120 сигналов системы самонаведения (см. фиг.3) не обнаружит сигналы инфракрасного излучения (S413). При этом сигналы инфракрасного излучения, которые могут идти от первого-четвертого передатчиков 321-324 сигналов, обозначены соответственно как первый, второй, третий и четвертый сигналы А321, А322, А323 и А324.
Если сигнал инфракрасного излучения обнаружен (S412), то робот-пылесос 100 может повернуть, не добившись успеха, чтобы приемник 120 сигналов системы самонаведения мог определить местоположение другого сигнала инфракрасного излучения (S414), код которого отличается от кода предыдущего сигнала. Поскольку значение угла и расстояния передачи первого сигнала А321 инфракрасного излучения самые большие среди первого-четвертого сигналов инфракрасного излучения, то приемник 120 сигналов системы самонаведения, как правило, сначала распознает первый сигнал А321 инфракрасного излучения. Таким образом, в случае обнаружения первого сигнала А321 инфракрасного излучения робот-пылесос 100 ведет поиски с целью обнаружения второго-четвертого сигналов А322-А324 инфракрасного излучения. В то же время, поскольку цель данного изобретения заключается в создании робота-пылесоса 100, способного быстро и точно приближаться к зарядному устройству 300, робот-пылесос 100 может продолжать поиск до тех пор, пока не обнаружит третий сигнал А323 инфракрасного излучения.
Если робот-пылесос 100-3 приближается к зарядному устройству 300 и обнаруживает третий сигнал А323 инфракрасного излучения (S415), то робот-пылесос может начать этап стыковки (S416) и завершить этап самонаведения (S416A).
Если до обнаружения третьего сигнала А323 инфракрасного излучения обнаружен четвертый сигнал А324 инфракрасного излучения, то робот-пылесос 100-4 может двигаться в зону переднего обзора зарядного устройства 300. Для этого робот-пылесос 100-4 до начала движения вперед может повернуть налево или направо на 90°, как показано стрелками С и D. Четвертый сигнал А324 инфракрасного излучения может быть передан от боковых стенок зарядного устройства 300. Как описано выше, дальность передачи четвертого сигнала А324 может быть относительно небольшой (около 1 м), а угол передачи сигнала относительно широким. Таким образом, оптимальный маршрут для обнаружения третьего сигнала А323 инфракрасного излучения можно получить тогда, когда робот-пылесос повернет налево или направо на 90° и станет передвигаться прямо, как показано на Фиг.7. В то же время, если после поворота при движении в прямом направлении робот-пылесос 100-4 получает первый сигнал А321 инфракрасного излучения, не получив третьего сигнала А323 инфракрасного излучения, то робот-пылесос 100-4 может передвигаться прямо по направлению к зоне переднего обзора зарядного устройства 300, которое испускает третий сигнал А323 инфракрасного излучения. Таким образом, робот-пылесос должен быстро обнаружить третий сигнал А323 инфракрасного излучения.
Если во время поиска обнаружен второй сигнал А322 инфракрасного излучения до того, как обнаружены третий и четвертый сигналы А323 и А324, то робот-пылесос 100-2 можно заставить двигаться по направлению к зоне переднего обзора зарядного устройства 300 (которое испускает сигналы), как показано стрелкой Е (S420).
Если до обнаружения со второго по четвертый сигналов А322-А324 инфракрасного излучения обнаружен первый сигнал А321 инфракрасного излучения, то робот-пылесос 100-1 можно заставить двигаться по направлению к зоне переднего обзора зарядного устройства 300, как показано стрелкой F (S422).
Несмотря на то, что каждый из сигналов инфракрасного излучения, переданных соответствующими передатчиками, может иметь площадь передачи сигнала в форме сектора, как показано на чертежах, чувствительность приема сигналов инфракрасного излучения может быть самой высокой для сигналов инфракрасного излучения, переданных от первоисточника сигналов. Поскольку первый и второй передатчики 321 и 322 сигналов могут находиться в центральной части передней стенки зарядного устройства 300, а приемник 120 сигналов системы самонаведения может располагаться в центре передней поверхности робота-пылесоса 100, принимая, таким образом, первый и второй сигналы А321 и А322 инфракрасного излучения, то наиболее эффективно робот-пылесос может приблизиться к центральной части передней поверхности зарядного устройства 300.
Если во время движения робот-пылесос не смог обнаружить какой-либо из сигналов инфракрасного излучения, он может двигаться по направлению к зарядному устройству 300 в течение заданного промежутка времени (S424) и непрерывно вести поиск до тех пор, пока не обнаружит третий сигнал А323 инфракрасного излучения. Заданный промежуток времени может зависеть от различных факторов, включая ожидаемый ресурс батареи.
Как описано выше, приемник 120 сигналов системы самонаведения робота-пылесоса 100 может принимать несколько сигналов инфракрасного излучения, которые могут отличаться друг от друга кодом, углом передачи сигнала и дальностью передачи сигнала. Устройство 210 управления (см. фиг.4) может установить приоритеты соответствующим полученным сигналам инфракрасного излучения. То есть устройство 210 управления может установить приоритеты полученным сигналам инфракрасного излучения в следующем порядке очередности: третий сигнал А323, четвертый сигнал А324, второй сигнал А322 и первый сигнал А321. Если получены два или более разных сигнала инфракрасного излучения, то устройство 210 может управлять движением робота-пылесоса 100 в порядке приоритетов полученных сигналов.
Таким образом, в соответствии с вышеописанным вариантом выполнения, в зарядном устройстве 300 может быть выполнен по меньшей мере один передатчик сигналов инфракрасного излучения, сигнал которого может отличаться от сигналов других передатчиков инфракрасного излучения углом передачи сигнала и дальностью передачи сигнала, а устройство 210 управления может рассчитать эффективный (даже оптимальный) маршрут в зависимости от расстояния между роботом-пылесосом 100 и зарядным устройством 300. В результате становится возможным создание робота-пылесоса 100, способного быстро и точно возвращаться к зарядному устройству 300. Кроме того, поскольку процесс и алгоритм возвращения робота-пылесоса 100 к зарядному устройству 300 является несложным, то производственные затраты могут быть уменьшены.
Ниже со ссылкой на фиг.9-11 описан этап самонаведения. Для удобства описания соответствующие передатчики 321-324 сигналов, выполненные на зарядном устройстве 300 (см. фиг.5А), не показаны на фиг.9-11.
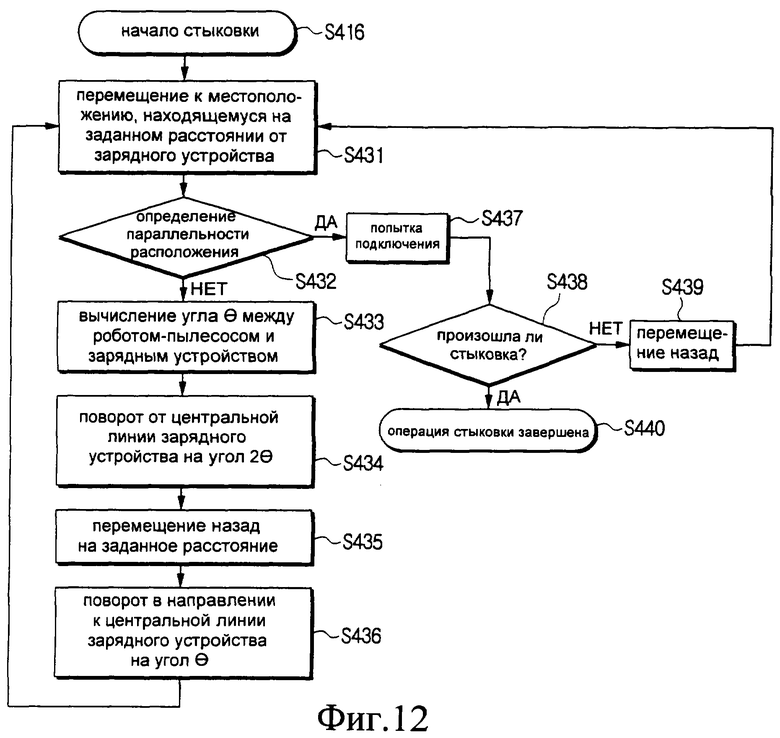
Если приемник 120 сигналов системы самонаведения обнаруживает третий сигнал А323 инфракрасного излучения (см. фиг.7) и начинается этап самонаведения, то робот-пылесос 100 может переместиться к местоположению, находящемуся от зарядного устройства 300 на заданном расстоянии (например, около 10 см) (S431). Заданное расстояние можно вычислить с помощью первого и второго датчиков 161 и 162 определения расстояния, которые могут находиться в роботе-пылесосе 100. И первый и второй датчики 161 и 162 могут передавать сигналы инфракрасного излучения зарядному устройству 300 и могут принимать сигналы инфракрасного излучения от указанного устройства. При этом, поскольку скорость распространения сигналов инфракрасного излучения постоянна, то можно вычислить соответствующие расстояния L1 и L2 от первого и второго датчиков 161 и 162 до зарядного устройства, используя время, прошедшее с момента передачи сигналов инфракрасного излучения до момента их получения. Можно использовать большее или меньшее значение из значений L1 и L2, или среднее значение значений L1 и L2.
Если робот-пылесос 100 достигает положения 10 см от зарядного устройства 300, то устройство 210 управления (см. фиг.4) может определить, расположены ли робот-пылесос 100 и зарядное устройство 300, по существу, параллельно друг другу (S432). Такое заключение можно сделать путем сравнения значений L1 и L2. Например, если вычисленные значения L1 и L2 одинаковы, то робот-пылесос 100 и зарядное устройство 300 могут быть параллельны друг другу. Если нет, то робот-пылесос 100 и зарядное устройство 300 могут не быть параллельны друг другу. Однако, поскольку маловероятно, чтобы значения L1 и L2 были одинаковыми с большой точностью, то желательно определить область допустимых значений для каждого из значений L1 и L2. Если вычисленные значения L1 и L2, по существу, одинаковы в пределах области допустимых значений, то реально предположить, что робот-пылесос 100 и зарядное устройство 300, по существу, параллельны друг другу.
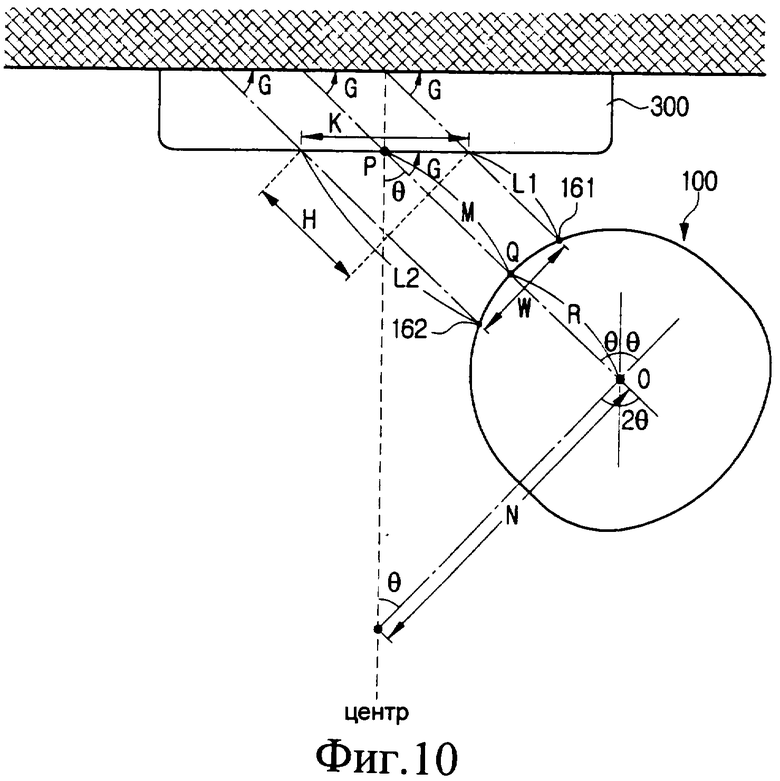
Если робот-пылесос 100 и зарядное устройство 300, по существу, не параллельны друг другу, то вычислительное устройство 230 для расчета расстояния и угла (см. фиг.4) может вычислить угол между роботом-пылесосом 100 и зарядным устройством 300 (S433). Как изложено ниже, угол можно вычислить, используя расстояние L1 от первого датчика 161 определения расстояния и расстояние L2 от второго датчика 162 определения расстояния до зарядного устройства 300.
Как видно из фиг.10, принимая разницу между расстояниями L1 и L2 за Н, а расстояние между первым и вторым датчиками 161 и 162 определения расстояния за W, величину К можно вычислить по формуле

Следовательно, угол G равен arccos(H/K) и, следовательно, угол отклонения θ между роботом-пылесосом 100 и зарядным устройством 300 можно вычислить по формуле

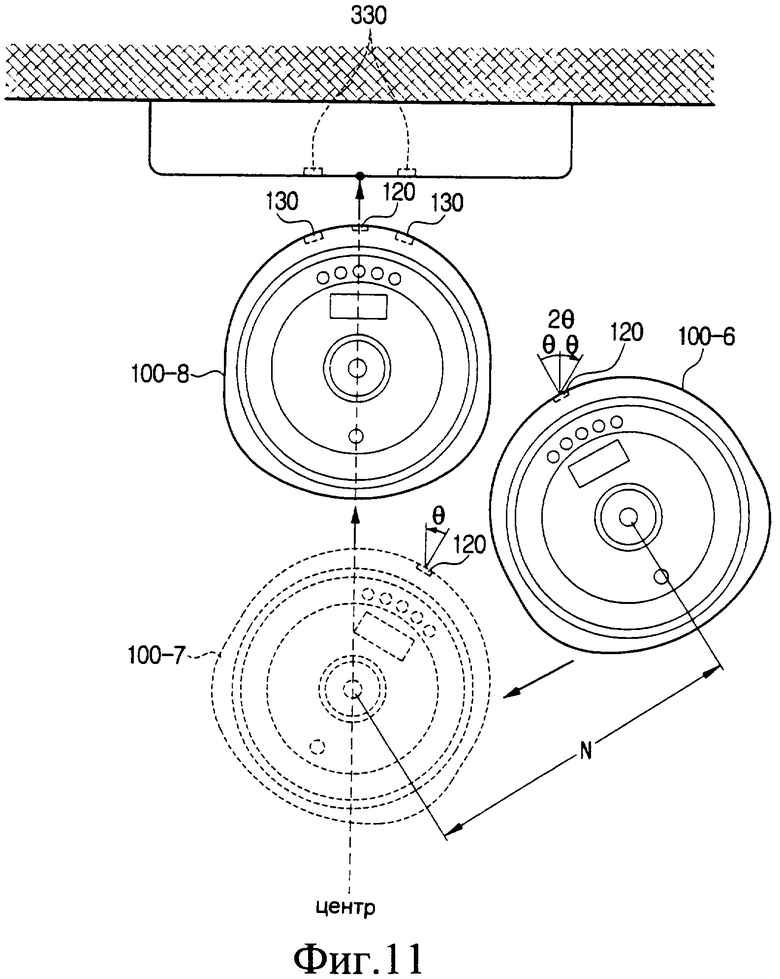
После вычисления угла θ между роботом-пылесосом 100 и зарядным устройством 300 робот-пылесос 100-6 может повернуть в направлении, в котором приемник 120 сигналов системы самонаведения поворачивается от центральной линии зарядного устройства 300 (т.е. в направлении по часовой стрелке, показанном на фиг.11) на угол, равный примерно двойному расчетному значению угла θ, как показано на фиг.11 (S434). Затем робот-пылесос 100-6 может двигаться по прямой назад на расстояние N так, чтобы его центр совместился с центральной линией зарядного устройства 300 (S435).
Расстояние N можно вычислить приведенным ниже способом. Обратимся вновь к фиг.10, из которой понятно, что расстояние N, которое нужно пройти назад роботу-пылесосу, равно расстоянию от центра О робота-пылесоса 100 до центральной точки Р зарядного устройства 300. То есть, если из центра О робота-пылесоса 100 провести выносную линию до центральной линии зарядного устройства 300 после того, как робот-пылесос 100 повернет на угол 2θ относительно его центральной точки, то угол между выносной и центральной линиями станет равным θ. Следовательно, расстояние N, которое нужно пройти назад роботу-пылесосу и расстояние от центра О робота-пылесоса 100 до центральной точки Р зарядного устройства 300, станут равными, поскольку они образуют две равные стороны равнобедренного треугольника. Принимая расстояние от центральной точки Q робота-пылесоса 100 до центральной точки Р зарядного устройства 300 за М, величину М можно вычислить по формуле

При этом следует принять во внимание, что значение М является приближенным. Соединительные клеммы робота-пылесоса 100 и зарядные клеммы 330 зарядного устройства 300 могут быть выполнены таким образом, что они смогут соединиться друг с другом, даже если точно располагаются на одной линии друг с другом. Кроме того, следует учесть, что соединительные клеммы 130 робота-пылесоса 100 могут выступать на его передней поверхности. В результате приближенное значение М может отличаться от реального. Однако разница, как правило, невелика и соединительные клеммы 130 могут быть по-прежнему соединены с зарядными клеммами 330. Выше в качестве примера описано, что выносная линия, проведенная от центра О робота-пылесоса 100, и центральная точка Р зарядного устройства 300 могут находиться на одной линии друг с другом, когда робот-пылесос 100 и зарядное устройство 300 не параллельны друг другу, как показано на фиг.10. Однако в зависимости от угла отклонения робота-пылесоса 100 выносная линия и центральная точка Р могут находиться не на одной линии друг с другом. Даже если такая ошибка случается, ее можно не учитывать, и соединительные клеммы 130 могут быть соединены с зарядными клеммами 330. Если такая погрешность велика, то определение параллельности робота-пылесоса 100 и зарядного устройства 300 можно произвести вновь, как описано ниже.
Принимая радиус робота-пылесоса 100 за R, расстояние N, которое нужно пройти роботу-пылесосу для того, чтобы его центр О и центральная линия, выходящая из центральной точки Р зарядного устройства 300, находились на одной линии друг с другом, можно вычислить по формуле

Обратимся вновь к фиг.11, из которой понятно, что после совмещения центра робота-пылесоса 100-7 и центральной линии зарядного устройства 300 робот-пылесос 100-7 может повернуть в направлении, в котором приемник 120 сигналов системы самонаведения поворачивается к центральной линии зарядного устройства 300 (т.е. в направлении против часовой стрелки, показанном на фиг.11) на угол, равный θ, как показано на фиг.11 (S436). После этого робот-пылесос 100-7 и зарядное устройство 300 могут оказаться параллельными друг другу. Затем робот-пылесос 100-8 может приблизиться к зарядному устройству 300 на расстояние примерно 10 см от него, таким образом, вновь выполняя этап S431.
В то же время, если робот-пылесос 100-8 и зарядное устройство 300 параллельны друг другу, то робот-пылесос 100 может попытаться пристыковаться так, чтобы соединительные клеммы 130 могли подключиться к зарядным клеммам (S437). Затем можно определить, произошла ли стыковка (S438). Если стыковка произошла (т.е. если соединительные клеммы 130 подключены к зарядным клеммам 330), то операция стыковки может быть завершена (S440). Однако если стыковка не произошла (т.е. если соединительные клеммы 130 неверно соединены с зарядными клеммами 330), то робот-пылесос может отойти примерно на 15 см (S439) и повторно выполнять этап S431.
Несмотря на то, что типичные варианты выполнения данного изобретения представлены и описаны для того, чтобы проиллюстрировать принцип данного изобретения, данное изобретение не ограничено в специфических вариантах выполнения. Понятно, что специалисты в данной области техники могут выполнить различные модификации и изменения, не отходя от сущности и объема правовой охраны прилагаемой формулы изобретения. Таким образом, считается, что такие модификации, изменения и их эквиваленты составляют сущность данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| Система и способ для ведения автоматического очистительного устройства по траектории | 2013 |
|
RU2628970C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| УСТРОЙСТВО, СПОСОБСТВУЮЩЕЕ АВТОМАТИЧЕСКОЙ СТЫКОВКЕ РОБОТА | 2007 |
|
RU2355564C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ВОЗВРАЩЕНИЯ САМОХОДНОГО РОБОТА К ЗАРЯДНОМУ УСТРОЙСТВУ | 2006 |
|
RU2306591C1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |








Изобретение относится к роботу-пылесосу и системе для его возвращения к зарядному устройству. Система возвращения робота-пылесоса к зарядному устройству содержит передатчик сигналов самонаведения, приемник системы самонаведения сигналов и устройство управления. Передатчик сигналов самонаведения содержит, по меньшей мере, четыре сигнальных передающих устройств. Первое, второе и третье из них выполнены с возможностью установки на передней стенке зарядного устройства и предназначены для соответствующей передачи сигналов, отличающихся друг от друга кодом или дальностью передачи. А четвертое выполнено с возможностью установки, по меньшей мере, на одной боковой стенке зарядного устройства и передает сигнал, код которого отличается от кодов сигналов первого, второго и третьего передающих устройств. Приемник системы самонаведения сигналов установлен в роботе-пылесосе и принимает, по меньшей мере, один сигнал, переданный от передатчика сигналов самонаведения. Устройство управления предназначено для распознавания указанного одного сигнала и для управления роботом с обеспечением его возвращения к зарядному устройству, основываясь, по меньшей мере, на указанном, по меньшей мере, одном сигнале. Робот-пылесос принимает инфракрасный сигнал, переданный от зарядного устройства, обнаруживает его местоположения и осуществляет стыковку с зарядным устройством с обеспечением зарядки робота-пылесоса. 2 н. и 17 з.п. ф-лы, 16 ил.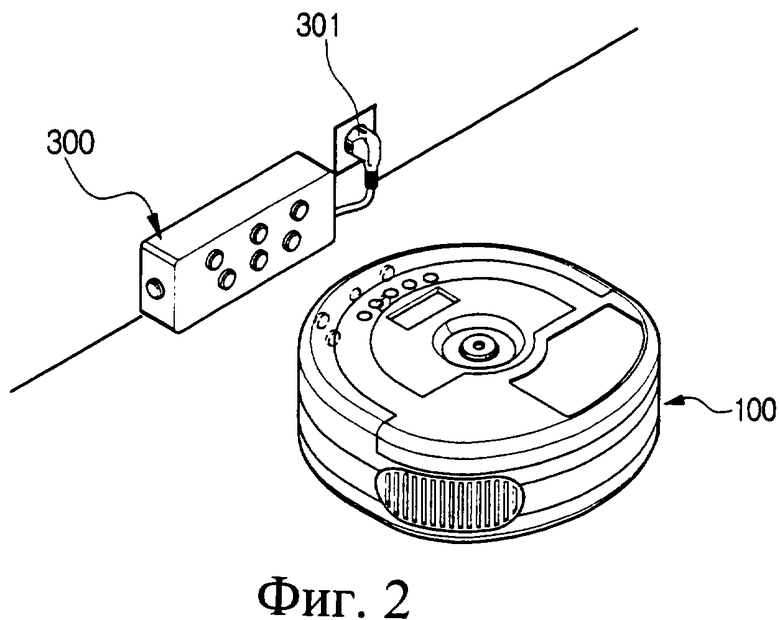
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| СВАРНАЯ ПРОВОЛОЧНАЯ СЕТКА ДЛЯ ГАБИОНОВ | 2007 |
|
RU2398647C2 |
| KR 20030013010 А, 14.02.2003 | |||
| СМЕСЬ ДЛЯ АВТОКЛАВНОГО ПЕНОБЕТОНА | 2009 |
|
RU2394796C1 |
| KR 20040062040 А, 07.07.2004. | |||

