ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется по заявке на патент Кореи №10-2006-123796, поданной 7 декабря 2006 года согласно 35 Своду законов США §119(а), полное содержание которой также включено в настоящую заявку посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
Настоящее изобретение относится, в общем случае, к устройству, способствующему автоматической стыковке робота. В частности, настоящее изобретение относится к устройству, способствующему автоматической стыковке робота, которое наводит робота на самостоятельное передвижение к месту стыковки для точной стыковки робота со стыковочным объектом.
Описание уровня техники
В общем случае, робот широко применяется в промышленных учреждениях и домах. Робот должен сам производить поиск объекта стыковки и пристыковываться к нему во время работы или после окончания работы. Например, в случае использования робота в условиях дома, для зарядки электричеством встроенного в робот аккумулятора робот-очиститель стыкуется с зарядным устройством, установленным в определенном месте, в течение определенного интервала времени и производит зарядку аккумулятора электричеством.
Устройство, способствующее автоматической стыковке робота-очистителя, описанное выше, раскрыто в корейской патентной публикации №2006-37008 и патенте Кореи №645381 настоящего заявителя. Однако огромное количество исследований постоянно выполняется, чтобы расширить угол и увеличить дальность, на которых сигналы стыковки могут действовать на робот, а также чтобы упростить устройство с точки зрения сборки, обслуживания и ремонта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Одним аспектом настоящего изобретения является решение указанных выше проблем и/или недостатков и обеспечение по меньшей мере преимуществ, описанных ниже. Соответственно, аспектом настоящего изобретения является создание устройства, способствующего автоматической стыковке робота, которое может охватывать значительную дальность, оставаясь простым с точки зрения устройства.
Другой аспект настоящего изобретения состоит в создании устройства, способствующего автоматической стыковке робота, которое может привести к точной стыковке робота со стыковочными клеммами стыковочного объекта.
Согласно аспекту иллюстративного варианта выполнения настоящего изобретения предусмотрено устройство, способствующее автоматической стыковке робота, которое приводит к соединению соединительных клемм робота, содержащего принимающий узел, со стыковочными клеммами, расположенными на одной поверхности стыковочного объекта, включая передающие узлы, расположенные на той же поверхности, что и стыковочные клеммы стыковочного объекта. Передающие узлы расположены под разными углами друг к другу соответственно для передачи сигналов в разных направлениях относительно друг друга. Соответственно, устройство может охватывать широкий угол и, таким образом, вызвать автоматическую стыковку робота, который приближается с разных углов.
Выступающая часть может быть выполнена на указанной одной стороне стыковочного объекта, на которой расположены стыковочные клеммы. В этом случае передающие узлы могут быть расположены на выступающей части. Выступающая часть также может иметь закругленную поверхность или быть выполнена в форме полуовальной сферы. Соответственно, конструкция устройства может быть упрощена и передающие узлы в устройстве могут быть выполнены на основе унифицированных модулей для облегчения обслуживания и ремонта.
Передающие узлы могут быть также расположены на выступающей части на одной высоте, или по меньшей мере часть передающих узлов может быть расположена на разных высотах по отношению друг к другу или по отношению к остальной выступающей части.
Предпочтительно, но необязательно, передающие узлы расположены над стыковочными клеммами. Таким образом, устройство может способствовать более точной стыковке соединительных клемм робота со стыковочными клеммами.
Согласно варианту выполнения настоящего изобретения каждый из передающих узлов может быть выполнен на основе инфракрасной лампы, стыковочное устройство может быть зарядным устройством, а стыковочные клеммы могут быть выполнены из зарядных клемм.
Устройство также может дополнительно содержать чувствительную ленту, расположенную по прямой линии в нижней части спереди стыковочных клемм.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные выше аспекты и другие преимущества данного изобретения станут более очевидны и скорее оценены из последующего подробного описания вариантов выполнения предлагаемого изобретения со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 изображает вид в аксонометрии устройства, способствующего автоматической стыковке робота согласно иллюстративному варианту выполнения настоящего изобретения;
Фиг.2 изображает сбоку вид сверху устройства, способствующего автоматической стыковке, показанного на Фиг.1;
Фиг.3 изображает вид спереди устройства, способствующего автоматической стыковке, показанного на Фиг.1;
Фиг.4 изображает вид сверху устройства, способствующего автоматической стыковке, показанного на Фиг.1;
Фиг.5 изображает процесс, в котором робот стыкуется с помощью устройства, способствующего автоматической стыковке, показанного на Фиг.1; и
Фиг.6 изображает вид в аксонометрии устройства, способствующего автоматической стыковке робота согласно другому иллюстративному варианту выполнения настоящего изобретения.
Надо понимать, что на всех чертежах одни и те же номера позиций относятся к одним и тем же элементам, признакам и конструкциям.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
В дальнейшем устройство, способствующее автоматической стыковке робота в соответствии с иллюстративными вариантами выполнения настоящего изобретения, будет описано подробно со ссылкой на прилагаемые чертежи. Робот, как описано выше, может быть одним из различных роботов, как, например, робот для очистки, робот для наблюдения, робот для транспортировки и т.п., а устройство, способствующее автоматической стыковке робота, может быть применено к различным роботам, таким как бытовой робот, промышленный робот и т.п. Однако в иллюстративных вариантах выполнения настоящего изобретения в качестве примера будет объяснено устройство, способствующее автоматической стыковке бытового робота с зарядным устройством.
Фиг.1, 2 и 3 представляют собой вид в аксонометрии, вид сбоку сверху и вид спереди устройства, способствующего автоматической стыковке робота согласно иллюстративному варианту выполнения настоящего изобретения.
Со ссылкой на Фиг.1-3, устройство 9, способствующее автоматической стыковке, согласно иллюстративному варианту выполнения настоящего изобретения содержит зарядное устройство 10, которое является стыковочным объектом, стыковочные клеммы 20, выступающую часть 30 и передающий узел 36.
Зарядное устройство 10 снабжено силовым кабелем, который выполнен с возможностью соединения с источником питания, и состоит из зарядной стойки 12 и подставки 14. Зарядная стойка 12 выполнена неизогнутой, а подставка 14 соединена с нижней частью зарядной стойки 12 и выступает вперед от нее. Зарядная стойка 12 является устройством, которое позволяет аккумулятору (не показан), например, робота 42 (см. Фиг.5) соединиться с источником питания и, таким образом, заряжаться электричеством, когда робот 42 состыкован и электрически соединен с источником. Подставка 14 служит для направления перемещения робота 42. Чувствительная лента 15 прикреплена по прямой линии на подставке 14 спереди от стыковочных клемм 20 так, что, когда робот 42 достигает подставки 14, нижний датчик (не показан), установленный на нижней поверхности робота 42, может обнаружить чувствительную ленту 15 с продолжением центровки робота 42 на чувствительной ленте 15.
Стыковочные клеммы 20 расположены на той же высоте, что и соединительные клеммы (не показаны) робота 42, на передней поверхности зарядной стойки 12, так что, когда робот 42 приближается к зарядной стойке 12, он с ней стыкуется. Когда соединительные клеммы робота 42 соединены со стыковочными клеммами 20, аккумулятор, установленный на роботе 42, заряжается электричеством.
Выступающая часть 30 расположена над стыковочными клеммами 20 на передней поверхности зарядной стойки 12. Поверхность выступающей части 30 закруглена, так что она выступает в форме овала, более точно в форме полуовальной сферы. Соответственно, как показано на Фиг.3, поскольку выступающая часть 30 продолжается влево и вправо, если смотреть спереди, поверхность выступающей части 30 обеспечивает место, которое может установить передающий узел 36 в горизонтальном направлении. В иллюстративном варианте выполнения настоящего изобретения, хотя выступающая часть 30 и показана и объяснена выполненной в форме овала, помимо этой формы, она может быть выполнена в форме полусферы, треугольника, четырехугольника, многоугольника.
Передающий узел 36 выполнен из нескольких, например из с первого по седьмой, передающих узлов 36а, 36b, 36с, 36d, 36е, 36f и 36g и расположен на одной и той же высоте в горизонтальном направлении на выступающей части 30. А именно, как показано на виде спереди на Фиг.3, передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g установлены в ряд в горизонтальной плоскости отстоящими друг от друга. Соответственно, передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g расположены под разными углами друг к другу соответственно для передачи сигналов в разных направлениях относительно друг друга. Также передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g выполнены из инфракрасных ламп, соответственно имеющих разные сигналы относительно друг друга. Со ссылкой на Фиг.4, в иллюстративном варианте выполнения настоящего изобретения передающий узел выполнен из семи передающих узлов. Первый передающий узел 36а, который расположен на Y-оси, т.е. в центре поверхности выступающей части 30, расположен под углом 0° (градусов) к Y-оси и передает инфракрасный сигнал, который дает угол в 0°. Второй и пятый передающие узлы 36b и 36е отстоят от передающего узла 36а по меньшей мере на угол θ1°. Соответственно, второй и пятый передающие узлы 36b и 36е испускают инфракрасный сигнал в направлениях, отклоненных по меньшей мере на θ1° влево и вправо от первого передающего узла 36а, и передают инфракрасные сигналы, которые представляют собой углы соответственно +θ1° и -θ1°. Третий и шестой передающие узлы 36с и 36f отстоят от передающего узла 36а, или Y-оси, по меньшей мере на угол θ2°, и испускают инфракрасный сигнал в направлениях, отклоненных по меньшей мере на θ2° влево и вправо от первого передающего узла 36а. Также третий и шестой передающие узлы 36с и 36f передают инфракрасные сигналы, которые представляют собой углы соответственно +θ2° и -θ2°. Четвертый и седьмой передающие узлы 36d и 36g отстоят от передающего узла 36а, или Y-оси, по меньшей мере на угол θ3° и испускают инфракрасный сигнал в направлениях, отклоненных по меньшей мере на θ3° влево и вправо от первого передающего узла 36а. Четвертый и седьмой передающие узлы 36d и 36g передают инфракрасные сигналы, которые представляют собой углы соответственно +θ3° и -θ3°. Как показано на Фиг.4, θ1° меньше, чем θ2°, а θ3° больше, чем θ2°. Как сказано выше, поскольку с первого по седьмой передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g расположены под разными углами друг к другу для передачи сигналов соответственно в разных направлениях, они могут охватывать более 180° перед зарядным устройством 10, как показано на Фиг.5. Таким образом, хотя робот робота-пылесоса 40, 42 или 46 приближается с любого направления, он может получить любой один или несколько инфракрасных сигналов, которые передаются от передающих узлов 36. Кроме этого, поскольку робот 40, 42 или 46 получает любой один или несколько инфракрасных сигналов в зависимости от своего местоположения, он может определять угол до стыковочных клемм 20, сам производить поиск местоположения, в котором угол до стыковочных клемм 20 становится равным 0°, и производить стыковку с зарядным устройством 10 так, что соединительные клеммы, установленные спереди него, соединяются со стыковочными клеммами 20. В иллюстративном варианте выполнения настоящего изобретения, хотя передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g показаны и объяснены, как было описано, так что три пары передающих узлов расположены через одинаковые интервалы, т.е. симметрично соответственно с центром на первом передающем узле 36а, они также могут быть расположены асимметрично вместо симметричного расположения. Конкретнее, передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g расположены так, что второй и пятый передающие узлы 36b и 36е расположены под разными углами к Y-оси, а четвертый и седьмой передающие узлы 36d и 36g расположены под разными углами к Y-оси. Первый передающий узел 36а также необязательно должен быть расположен на Y-оси, а количество передающих узлов может также быть скорректировано специалистом по желанию в пределах диапазона, что никак не сказывается на способности робота принимать сигналы. Как описано выше, передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g, т.е. передающий узел 36, тщательно расположен на выступающей части 30 так, что выступающая часть 30, на которой расположен передающий узел 36, может быть унифицирована, облегчая сборку передающего узла 36 в зарядном устройстве 10 во время производства, а также облегчая его отсоединение от зарядного устройства 10 при обслуживании и ремонте. Тем самым упрощается конструкция устройства 9, способствующего автоматической стыковке, и снижаются производственные затраты.
В дальнейшем работа робота 40, 42 и 46, когда он пристыковывается к стыковочным клеммам 20 зарядного устройства 10 посредством устройства 9, способствующего автоматической стыковке, будет подробно объяснена со ссылкой на Фиг.5.
Как показано на Фиг.5, с первого по седьмой передающие узлы 36а, 36b, 36с, 36d, 36е, 36f и 36g передают инфракрасные сигналы, которые соответствуют их местоположениям. Со ссылкой на Фиг.5, робот 40, расположенный в середине, получает инфракрасный сигнал 0°, переданный от первого передающего узла 36а. Робот 40, поскольку он расположен спереди стыковочных клемм 20, продолжает движение вперед и приходит на подставку 14. Когда робот 40 приходит на подставку 14, он обнаруживает чувствительную ленту 15, прикрепленную к подставке 14, и продолжает движение вперед, центрируясь на чувствительной ленте 15 для стыковки соединительных клемм (не показаны) робота 40 со стыковочными клеммами 20. Что касается робота 42, если он приближается с левой стороны устройства 9, способствующего автоматической стыковке, то он принимает инфракрасный сигнал - θ3° от седьмого передающего узла 36g, а затем постепенно перемещается вправо, одновременно принимая по очереди инфракрасные сигналы - θ2° и - θ1°. Когда робот 42 наконец принимает инфракрасный сигнал 0°, он продолжает движение и перемещается вдоль чувствительной ленты 15 на подставку 14, одновременно распознавая чувствительную ленту, чтобы состыковаться соединительными клеммами (не показаны) робота 42 со стыковочными клеммами 20. В случае робота 46, если он приближается с правой стороны устройства 9, способствующего автоматической стыковке робота, то он принимает инфракрасный сигнал +θ3° от четвертого передающего узла 36d, а затем постепенно перемещается влево, одновременно принимая по очереди инфракрасные сигналы +θ2° и +θ1°. Когда робот 46 наконец принимает инфракрасный сигнал 0°, он продолжает движение и перемещается вдоль чувствительной ленты 15 на подставку 14, одновременно распознавая чувствительную ленту, чтобы состыковаться соединительными клеммами (не показаны) робота 46 со стыковочными клеммами 20.
Фиг.6 является видом в аксонометрии, изображающим устройство 119, способствующее автоматической стыковке робота, согласно другому иллюстративному варианту выполнения настоящего изобретения. Элементы этого устройства, одинаковые с элементами устройства 9, способствующего автоматической стыковке робота, описанного выше, обозначены одинаковыми номерами позиций. Автоматическое устройство 119, способствующее автоматической стыковке, имеет ту же конструкцию, что и автоматическое устройство 9, способствующее автоматической стыковке, за исключением того, что пять передающих узлов 136а, 136b, 136с, 136d и 136е расположены на выступающей части 130 и установлены на разных высотах. Хотя все передающие узлы 136а, 136b, 136с, 136d и 136е могут быть расположены на разных высотах, в другом иллюстративном варианте выполнения настоящего изобретения только второй и четвертый передающие узлы 136b и 136d расположены на более низкой высоте по сравнению с остальными 136а, 136с и 136е передающими узлами.
Как очевидно из вышеприведенного описания, согласно иллюстративному варианту выполнения настоящего изобретения преимущество устройства, способствующего автоматической стыковке, заключается в том, что оно может покрывать широкий диапазон, имея при этом упрощенную конструкцию.
Кроме того, устройство, способствующее автоматической стыковке, согласно настоящему изобретению имеет передающий узел, выполненный так, что выступающая часть, на которой расположены передающие узлы, может быть модулизирована, обеспечивая тем самым легкую сборку передающих узлов, их обслуживание и ремонт, а также низкую стоимость устройства, способствующего автоматической стыковке.
Кроме этого, устройство, способствующее автоматической стыковке, согласно иллюстративному варианту выполнения настоящего изобретения имеет преимущество, заключающееся в том, что оно может обеспечить точную стыковку робота со стыковочными клеммами стыковочного объекта.
Вышеуказанные варианты выполнения и преимущества являются только иллюстративными, и их не следует толковать как ограничивающие настоящее изобретение. Также понятно, что специалистом могут быть выполнены различные видоизменения и модификации без отхода от сущности и объема изобретения, как определено в прилагаемой формуле изобретения. Таким образом, понимается, что все такие видоизменения, модификации и эквивалентные конструкции подпадают под объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ НАГРЕВАТЕЛЬНЫХ ЭЛЕМЕНТОВ ОБОГРЕВАЕМОЙ СТРЕЛКИ | 2013 |
|
RU2608194C2 |
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| ТРАНСФОРМИРУЕМЫЙ ОДНИМ ДВИЖЕНИЕМ НОЖ-СКРЕБОК | 2020 |
|
RU2748918C1 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| СИСТЕМА И СПОСОБ ВОЗВРАЩЕНИЯ РОБОТА-ПЫЛЕСОСА К ЗАРЯДНОМУ УСТРОЙСТВУ | 2006 |
|
RU2338639C9 |
| ТРАВЕРСА СО СДВОЕННЫМИ ПРИВОДНЫМИ РЕМНЯМИ ДЛЯ РОБОТОВ | 2017 |
|
RU2718857C2 |
| УСОВЕРШЕНСТВОВАННОЕ УПЛОТНЕНИЕ СКВАЖИННОГО ЭЛЕКТРИЧЕСКОГО ПОГРУЖНОГО НАСОСА | 2009 |
|
RU2524590C2 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ ИНДУКЦИОННЫМ НАГРЕВОМ | 2007 |
|
RU2449509C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
Устройство для автоматической стыковки робота способствует соединению соединительных клемм робота, содержащего принимающий узел, со стыковочными клеммами, расположенными на одной поверхности стыковочного объекта, содержащее передающие узлы. Передающие узлы расположены на той же поверхности под разными углами друг к другу соответственно для передачи сигналов в разных направлениях друг к другу. Устройство содержит выступающую часть, выполненную на указанной поверхности, на которой расположены передающие узлы с возможностью охвата угла по меньшей мере 180° в плоскости. Передающие узлы могут быть расположены на одной высоте на выступающей части или, по меньшей мере, часть передающих узлов расположена на разной высоте по отношению друг к другу или по отношению к другим передающим узлам на выступающей части. Устройство также содержит чувствительную ленту, расположенную по прямой линии в нижней части спереди указанных стыковочных клемм. Изобретение позволяет покрывать широкий диапазон воздействия сигналов стыковки на робот при точной стыковке робота, упрощенной конструкции и легкой сборке передающих узлов. 2 н. и 17 з.п. ф-лы, 6 ил.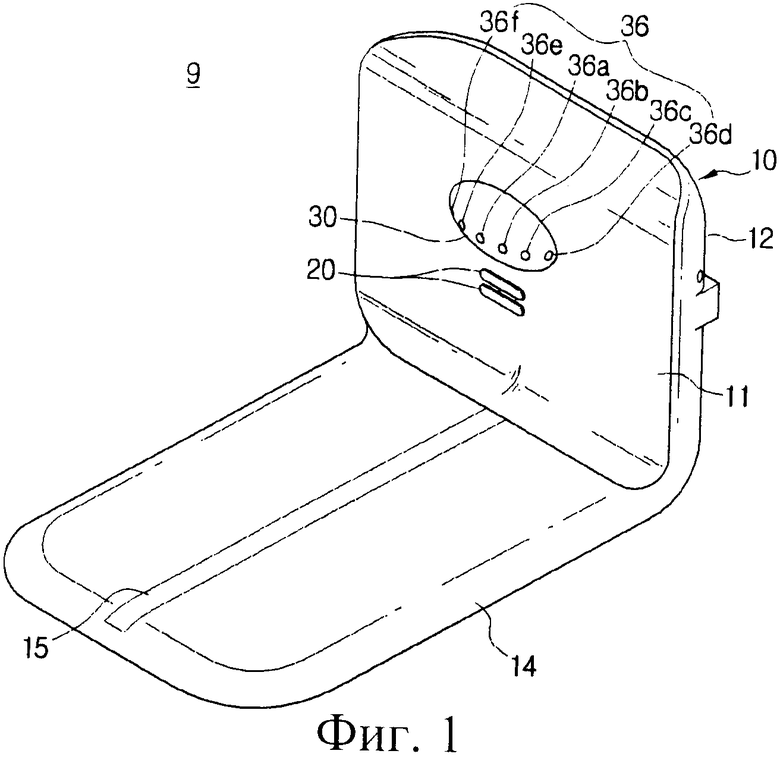
1. Устройство для автоматической стыковки робота, способствующее соединению соединительных клемм робота, содержащего принимающий узел, со стыковочными клеммами, расположенными на одной поверхности стыковочного объекта, содержащее передающие узлы, расположенные на указанной одной поверхности, в котором указанные передающие узлы расположены под разными углами друг к другу соответственно для передачи сигналов в разных направлениях друг к другу.
2. Устройство по п.1, дополнительно содержащее выступающую часть, выполненную на указанной одной поверхности, в котором указанные передающие узлы расположены на выступающей части.
3. Устройство по п.2, в котором поверхность выступающей части закруглена.
4. Устройство по п.2, в котором выступающая часть выполнена в форме полуовальной сферы.
5. Устройство по п.2, в котором указанные передающие узлы расположены для охвата угла по меньшей мере 180° в плоскости.
6. Устройство по п.2, в котором указанные передающие узлы расположены на одной высоте на выступающей части.
7. Устройство по п.2, в котором по меньшей мере часть указанных передающих узлов расположена на разной высоте по отношению друг к другу или по отношению к другим передающим узлам на выступающей части.
8. Устройство по п.1, в котором указанные передающие узлы расположены над стыковочными клеммами.
9. Устройство по п.8, в котором каждый из указанных передающих узлов содержит инфракрасную лампу.
10. Устройство по п.1, в котором указанный стыковочный объект содержит зарядное устройство и в котором указанные стыковочные клеммы содержат зарядные клеммы.
11. Устройство по п.1, дополнительно содержащее чувствительную ленту, расположенную по прямой линии в нижней части спереди указанных стыковочных клемм.
12. Устройство для автоматической стыковки робота с соединительными клеммами и принимающим узлом, содержащее стыковочный объект с стыковочными клеммами, расположенными на поверхности, выполненными для электрической связи с соединительными клеммами робота, когда робот состыкован со стыковочным объектом, и передающие узлы, расположенные на указанной поверхности, причем каждый из них выполнен с возможностью передачи сигнала в отличном от других направлении для приема его принимающим узлом робота для помощи в автоматической стыковке.
13. Устройство по п.12, дополнительно содержащее выступающую часть, выполненную на указанной одной поверхности, в котором указанные передающие узлы расположены на выступающей части.
14. Устройство по п.12, в котором поверхность выступающей части закруглена.
15. Устройство по п.13, в котором выступающая часть выполнена в форме полуовальной сферы.
16. Устройство по п.12, в котором указанные передающие узлы расположены для охвата угла по меньшей мере 180° в плоскости.
17. Устройство по п.12, в котором указанные передающие узлы расположены на общей высоте.
18. Устройство по п.12, в котором по меньшей мере часть указанных передающих узлов расположена на разной высоте.
19. Устройство по п.12, дополнительно содержащее силовой кабель, электрически соединенный со стыковочными клеммами, причем силовой кабель соединен с источником питания.
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

