Заявляемое изобретение относится к робототехнике и может применяться в конструкциях роботов, предназначенных для ликвидации чрезвычайных ситуаций, например для обнаружения и уничтожения взрывоопасных устройств.
Мобильные роботы, предназначенные для ликвидации чрезвычайных ситуаций, известны. Эти роботы должны работать на значительном удалении от оператора и иметь возможно малые размеры и массу, большую зону обслуживания, а также высокую точность позиционирования конечных звеньев манипулятора. Широкое применение в данной отрасли нашли роботы с шарнирными манипуляторами. Одним из аналогов предлагаемой конструкции является робот MV4 (см. «Мобильные роботизированные взрывотехнические комплексы», журнал «Специальная техника» №1), у которого первое звено манипулятора шарнирно связано с транспортным средством, второе звено шарнирно соединено с первым звеном, а третье конечное звено шарнирно соединено со вторым звеном.
Серийно изготавливаемый в ОАО «КЭМЗ» мобильный робот «Варан», выбранный в качестве прототипа, также имеет манипулятор, первое звено которого шарнирно соединено с транспортным средством, второе звено шарнирно соединено с первым звеном, а третье конечное звено шарнирно соединено со вторым звеном. Для привода второго и третьего звеньев используются передачи с гибким тяговым органом (цепные передачи), ведущие звездочки которых через шлицевые соединения связаны с валами, которые одновременно являются ведомыми звеньями предохранительных муфт. Ведущими звеньями этих муфт являются ведомые зубчатые колеса приводов. Сами приводы второго и третьего звеньев манипулятора робота «Варан» установлены таким образом, что валы ведущих звездочек цепных передач всегда параллельны опорной поверхности транспортного средства, в результате чего третье звено манипулятора совершает плоскопараллельное движение относительно транспортного средства при любых движениях первого и второго звеньев манипулятора.
Недостатком известных устройств является наличие вращающихся валов между ведущими звездочками цепных передач и выходными зубчатыми колесами приводов, что обуславливает значительные габариты манипулятора и значительную массу манипулятора. Кроме того, наличие соединений (в прототипе - шлицевых) между ведущими звездочками цепных передач и валами снижает надежность соединений, выражающуюся, в конкретном случае, в увеличенных люфтах третьего звена по отношению к транспортному средству.
Технической задачей заявляемого изобретения является снижение массы робота при одновременном повышении точности перемещения его конечного звена.
Указанный технический результат достигается тем, что в мобильном роботе, состоящем из транспортного средства, шарнирно соединенного с ним первого звена, шарнирно соединенного с первым звеном второго звена, шарнирно соединенного со вторым звеном конечного звена, приводов звеньев, установленных неподвижно относительно транспортного средства, передач с гибкими тяговыми органами, соединяющих второе и конечное звенья с ведомыми дисками предохранительных муфт, ведущими дисками которых являются выходные колеса приводов второго и конечного звеньев, согласно изобретению выходные колеса приводов второго и третьего звеньев установлены на одной общей неподвижной оси с возможностью вращения относительно этой оси, ведомые диски предохранительных муфт выполнены за одно целое с ведущими звеньями передач, имеющих гибкие тяговые органы, и установлены на той же оси с возможностью вращения относительно общей оси.
Заявляемое техническое решение, в связи с отсутствием вращающихся валов, позволяет резко снизить массу манипулятора и соответственно всего робота. Кроме того, вследствие уменьшения количества соединений в передачах от ведомых зубчатых колес до звеньев манипулятора повышается кинематическая точность перемещения конечного звена манипулятора.
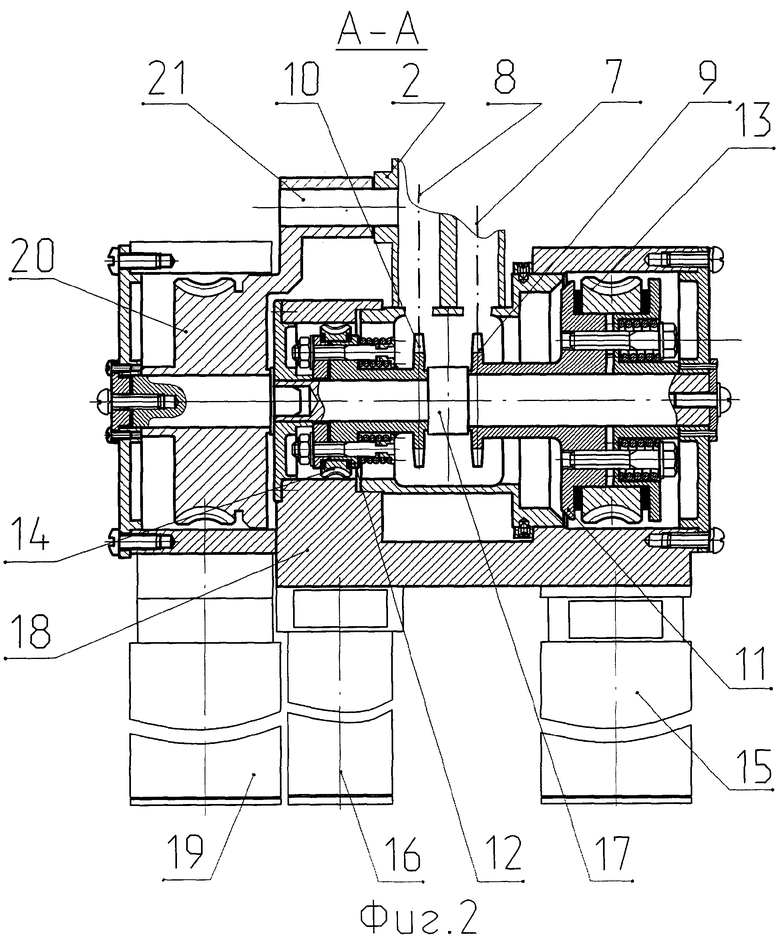
Сущность заявляемого решения поясняется чертежами. На фиг.1 приведен общий вид мобильного робота, а на фиг.2 - разрез по А-А (по плоскости симметрии приводов второго и третьего звеньев манипулятора).
Мобильный робот состоит из транспортного средства 1 (см. фиг.1), с которым шарнирно соединено первое звено 2 манипулятора. Второе звено 3 манипулятора шарнирно соединено с первым звеном 1, а третье (конечное) звено 4 шарнирно соединено со вторым звеном 3. Ведомые звездочки 5 и 6 цепных передач 7 и 8 соединены со вторым звеном 3 и третьим звеном 4 соответственно.
Ведущие звездочки 9 (фиг.2) и 10 цепных передач 7 и 8 выполнены за одно целое с ведомыми дисками 11 и 12 предохранительных фрикционных муфт. Ведущими звеньями предохранительных муфт служат выходные колеса 13 и 14 червячных редукторов. Ведомые диски 11 и 12 постоянно прижаты к выходным колесам 13 и 14 червячных редукторов. Для привода редукторов в движение предусмотрены электродвигатели 15 и 16. Ведущие звездочки 9 и 10 цепных передач 7 и 8 с ведомыми дисками 11 и 12, а также червячные колеса 13 и 14 смонтированы на оси 17 с возможностью вращения относительно нее. Ось 17 смонтирована неподвижно относительно корпуса 18. В свою очередь, корпус 18 смонтирован неподвижно относительно транспортного средства 1. На приведенных чертежах привод первого звена 2 состоит из электродвигателя 19 и червячного редуктора, выходное колесо 20 которого через палец 21 соединено с первым звеном 2 манипулятора. Ведомые звездочки 5 и 6 имеют одинаковое количество зубьев с ведущими звездочками 9 и 10. Таким образом, цепные передачи образуют пантографы, которые обеспечивают плоскопараллельное движение относительно транспортного средства 1 звена 3 при неподвижной звездочке 11 и звена 4 при неподвижной звездочке 12, то есть при выключенных приводах второго звена 3 или третьего звена 4.
В качестве варианта предохранительные муфты могут отсутствовать, тогда ведущие звездочки 9 и 10 должны быть жестко соединены с червячными колесами 13 и 14.
Заявляемый мобильный робот работает следующим образом.
Для приведения в движение звена 2 включается электродвигатель 19, который через колесо 20 червячного редуктора и далее через палец 21 вращает звено 2 относительно оси 17. При включении электродвигателей 15 и 16 начинают вращаться ведомые колеса 13 и 14 червячных редукторов вместе с прижатыми к колесам 13 и 14 ведомыми дисками 11 и 12 фрикционных муфт, изготовленными за одно целое с дисками. Ведущие звездочки 9 и 10 цепных передач 5 и 6 также приходят в движение, поворачивая через цепи ведомые звездочки 7 и 8, которые приводят в движение соединенные с ними звенья 3 и 4 манипулятора.
Имеющиеся в конструкции фрикционные муфты предохраняют приводы второго и третьего звеньев манипулятора от перегрузок. В случае если ко второму звену 3 или третьему звену 4 приложена нагрузка, превышающая настройку соответствующей предохранительной муфты, при вращении колес 13 или 14 соответствующий диск 11 или 12 будет проскальзывать относительно ведущего зубчатого колеса, предохраняя механизм от поломки.
При отсутствии фрикционных муфт движение от электродвигателей 15 и 16 передастся через ведомые колеса 13 и 14 непосредственно на соединенные с колесами 13 и 14 ведущие звездочки 9 и 10 и далее на ведомые звездочки 7 и 8.
Заявляемое устройство проверено в ходе выполнения ОКР «Вездеход-ТМ5». Мобильный робот, выполненный по известной схеме на стадии предварительных испытаний, имел массу 63,75 кг, из них масса манипулятора в соответствии с протоколом предварительных испытаний №12 составила 19,75 кг, что не укладывалось в требования ТТЗ. После переработки в соответствии с заявленным решением масса манипулятора снизилась до 11,5 кг, а всего робота до 48,5 кг, что зафиксировано в протоколе государственных испытаний №14, и что позволило выполнить требования ТТЗ.
Библиографические данные
1. Мобильные роботизированные взрывотехнические комплексы. Журнал «Специальная техника», №1 (робот MV4), 2000 г.
2. МКРН.461343.002 РЭ Изделие «Варан». Руководство по эксплуатации. Чертежи согласно МКРН.461343.002. Изд. Ковровский электромеханический завод. 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Промышленный робот | 1985 |
|
SU1310198A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА И/ИЛИ МУСКУЛЬНОГО ТРЕНАЖЕРА (ВАРИАНТЫ) | 2012 |
|
RU2533870C2 |
| Привод конвейера | 1990 |
|
SU1731698A1 |
| Стенд для испытания предохранительных муфт | 1976 |
|
SU601589A1 |
| Манипулятор | 1985 |
|
SU1284821A1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |
Изобретение относится к конструкции роботов, предназначенных для ликвидации чрезвычайных ситуаций. Мобильный робот выполнен в виде транспортного средства и шарнирно соединенного с ним манипулятора, состоящего из первого звена, шарнирно соединенного с первым звеном второго звена, шарнирно соединенного со вторым звеном конечного третьего звена. Приводы звеньев установлены неподвижно относительно транспортного средства. Посредством передач с гибкими тяговыми органами второе и конечное звенья соединены с ведомыми дисками предохранительных муфт, ведущими дисками которых являются выходные колеса приводов второго и конечного звеньев. Выходные колеса приводов второго и конечного третьего звеньев установлены на одной общей неподвижной оси с возможностью вращения относительно этой оси, ведомые диски предохранительных муфт выполнены за одно целое с ведущими звеньями передач, имеющих гибкие тяговые органы, и также установлены на той же оси с возможностью вращения относительно общей оси. Изобретение позволит снизить массу робота при одновременном повышении точности перемещения его конечного звена. 2 ил.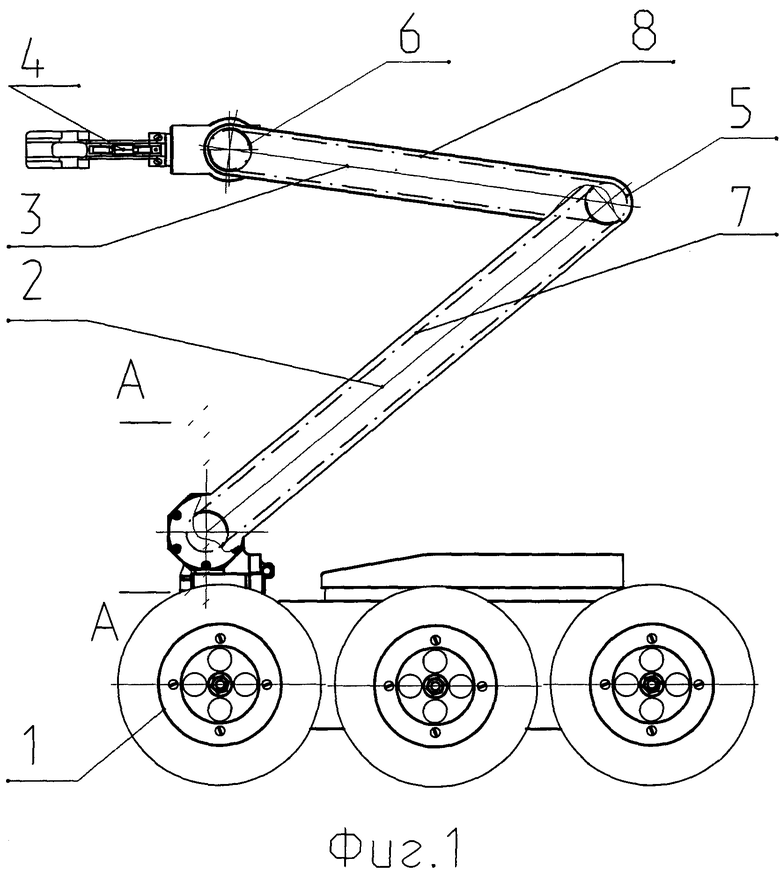
Мобильный робот, состоящий из транспортного средства, шарнирно соединенного с ним первого звена, второго звена шарнирно соединенного с первым звеном, конечного третьего звена шарнирно соединенного с вторым звеном, приводов звеньев, установленных неподвижно относительно транспортного средства, передач с гибкими тяговыми органами, соединяющих второе и конечное третье звенья с ведомыми дисками предохранительных муфт, ведущими дисками которых являются выходные колеса приводов второго и конечного третьего звеньев, отличающийся тем, что выходные колеса приводов второго и конечного третьего звеньев установлены на одной общей неподвижной оси с возможностью вращения относительно этой оси, ведомые диски предохранительных муфт выполнены за одно целое с ведущими звеньями передач с гибкими тяговыми органами, и также установлены на той же оси с возможностью вращения относительно общей оси.
| БАТАНОВ А.Ф | |||
| и др | |||
| Мобильные роботизированные взрывотехнические комплексы | |||
| Специальная техника, №1, 2000 г.[найдено 21.03.2008] | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Устройство для приема дальновидения на большой экран | 1937 |
|
SU56996A1 |
| US 4932831 A1, 12.06.1990. | |||

