12848
ходящиеся в зацеплении с рейкой 10 продольного перемещения механической руки 3. Зубчатое колесо 21 жестко установлено на валу 12, а зубчатые колеса 17, 18, 22 и 24 связаны с соответствующими валами с помощью электромагнитных муфт 19, 20, 23 и 25. Муфты 27 и 28 предназначены для фиксации валов 12 и 13 относительно корпуса каретки 2, а муфта
1
Изобретение относится к машинотроению, а именно к манипуляторам и промьгашенным роботам, и может быть спользовано в быстропереналаживае- ых автоматических линиях для загрузи-разгрузки основного технологичесого оборудования.
Цель изобретения - повышение наежности за счет упрощения конструкии.
На чертеже изображен манипулятор, общий вид.
Манипулятор содержит портал 1 с направляющими, каретку 2 с механической рукой 3, смонтированную на портале, и привод 4 с цепной передачей, ведущая звездочка 5, закрепленная на валу двигателя, и ведомая звездочка 6 расположены на разных концах портала и связаны между собой бесконечной цепью 7.
Механическая рука 3 вьтолнена в виде шлицевого вала 8, на конце которого смонтирован захват 9. На этом же валу закреплена зубчатая рейка 10 и установлено червячное колесо 11.
На корпусе каретки 2 смонтированы три вала 12-14. На одном конце валов 12 и 13 закреплены соответственно звездочки 15 и 16, находящиеся в зацеплении с цепью 7, а на другом конце этих же валов установлены зубчатые колеса 17 и 18, находящиеся в зацеплении с рейкой 10 и связанные с соответствующими валами, управляющими электромагнитными муфтами 19 и 20. В средней части этих валов установлены находящиеся в зацеплении друг с другом зубчатые колеса 21 и 22, причем колесо 21 закреплено жестко
29 фиксирует положение механической руки 3 относительно того же корпуса. Включением соответствующих муфт при непрерывном перемещении цепи 7 можно получить требуемые перемещения каретки 2 по порталу 1 .и механической руки 3 относительно каретки 2 с остановкой их в любой промежуточной точке, а также вращение захвата 9. 1 ил.
5
0
5
0
5
0
на валу 12, а колесо 22 связано с валом 13 с помощью управляющей электромагнитной муфты 23. На одном конце вала 14 каретки 2 смонтировано зубчатое колено 24, находящееся в зацеплении с зубчатым колесом 21 и связанное с валом 14 с помощью управляющей муфты 25, а на другом конце этого же вала закреплен червяк 26, находящийся в зацеплении с червячным колесом 11, установленным на шлицевом- валу механической руки 3.
Каретка 2 также снабжена тремя фиксирующими электромагнитньми муфтами 27-29, ведомые элементы которых закреплены на корпусе каретки 2, а ведущие - соответственно на валах 12 и 13 и зубчатом колесе 17.
Манипулятор работает следующим образом.
Установленный на корпусе постоянно включенньй привод 4 с помощью ведущей звездочки 5 приводит в движение бесконечную цепь 7. Включением одной из электромагнитных муфт 27 или 28 производится торможение соответствующих валов 12 или 13 с жестко установленньми на них звездочками
15 или 16,чем и обеспечивается пере- мещение каретки 2 по порталу 1 в любом из двух направлений, соответствующих направлению движения верхней или нижней ветви цепи. Дня фиксации каретки 2 в любой точке на портале 1 при выключенных муфтах 27 и 28 включается муфта 23, которая жестко соединяет зубчатое колесо 22 с валом 13, в результате- что замыкается кинематическая цепь между звездочками 15 и 16, приводимыми во вращение со3
ответственно верхней и нижней ветвью цепи 7. При этом каретка 2 останавливается .
При зафиксированном положении каретки 2 подъем и опускание механической руки 3 осуществляется включением электромагнитных муфт 19 или 20, при этом вращательное движение от соответствующего вала 12 или 13 передается зубчатым колесом 17 или 18, которые через рейку 10 передают движение на шлицевой вал 8 с захватом 9. Для фиксации руки 3 в любой точке на пути ее вертикального перемещения служит электромагнитная муфта 29.
При зафиксированном положении каретки 2 вращение захвата 9 производится включением муфты 25. При этом вращение от зубчатого колеса 21 передается на зубчатое колесо 24, вал 14, далее на червячную пару 26-11 и затем на шлицевой вал 8.
Формула изобретения
Манипулятор, содержащий портал ci направляющими, каретку, смонтированную на портале, механическую руку с захватом, имеющ1 м возможность возвратно-поступательного перемещения в направлении продольной оси механической руки и вращения вокруг этой оси от приводов, отличаю щ и и с я тем, что, с целью повышения надежности за счет упрощения конструкции, привод вьшолнен в виде двигателя с цепной передачей, ведущая звездочка которой, закрепленная на валу двигателя, и ведомая - расположены на разных концах портала и связаны бесконечной цепью, а механическая рука вьтолнена в виде зубчатой рейки, жестко связанной с шли- цевым валом, на котором с возмож
Редактор И.Дербак
Составитель Ю.Вильчинский
Техред Л.Сардюкова Корректор А.Зимокосов
Заказ 7510/18
Тираж 950Подписное
ВНИЖ1И Государ(ственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, .4
2848214
ностью продольного относительного перемещения установлено червячное колесо, на конце которого размещен захват, а каретка выполнена в виде 5 корпуса, на котором смонтированы
три вала с параллельно расположенными осями, снабженные управляющими электромагнитными муфтами,на одном конце первого и второго валов жестко
to закреплены по одной дополнительной звездочке с равными делительными окружностями, одна из которых находится в зацеплении с ведомой (верхней) ветвью бесконечной цепи приво- 5 да, а другая - с ведущей (нижней)
ветвью той же цепи, а на другом конце этих же валов смонтировано по зуб- чатому колесу, каждое из которых на-- ходится в зацеплении с зубчатой рейкой механической руки и связано с соответствующим валом с помощью одной из указанных электромагнитных муфт, причем в средней части этих валов также установлено по одному зубчатому колесу, и первый вал жестко связан с соответствующим колесом, а второй вал связан с колесом с по- :мощью электромагнитной муфты, причем на одном конце третьего вала
30 смонтировано зубчатое колесо, связанное с ним соответствующей электромагнитной муфтой и находящееся в зацеплении с зубчатым колесом, жестко связанным с первым валом, а на дру- 35 гом конце третьего вала расположен червяк, находящийся в зацеплении с червячным колесом, размещенным на шлицевом ваду механической руки, при этом каретка снабжена дополни40 тельно тремя фиксирующими электро- магнитньми муфтами, ведомые элементы которых закреплены на корпусе каретки, а ведущие связаны соответственно с первым и вторым валами и через ..
45 зубчатое колесо первого вала - с рейкой.
20
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1685701A1 |
| Манипулятор | 1985 |
|
SU1265040A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1991 |
|
RU2047483C1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Стенд для исследования механизмов | 1987 |
|
SU1636855A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 1999 |
|
RU2153909C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Устройство А.С.Кривовязюка для загрузки листового материала на каретку | 1984 |
|
SU1224056A1 |
| Портальный фрезерный станок с числовым программным управлением | 1981 |
|
SU952470A1 |
Изобретение относится к машиностроению, а именно к манипуляторам и промьшшенным роботам, и может быть использовано в быстропереналаживае- мых автоматических линиях для загрузки-разгрузки оборудования. Цель изобретения - повышение надежности за счет упрощения конструкции. На портале 1 смонтированы каретка 2 с механической рукой 3 и привод 4. На каретке 2 установлены валы 12-14, оси которых параллельны. На одном конце валов 12 и 13 закреплены звездочки 15 и 16, находящиеся в зацеплении с постоянно движущейся цепью 7 привода, а на другом конце этих же валов - зубчатые колеса 17 и 18, на15 (Л с: to 00 liti 00 ы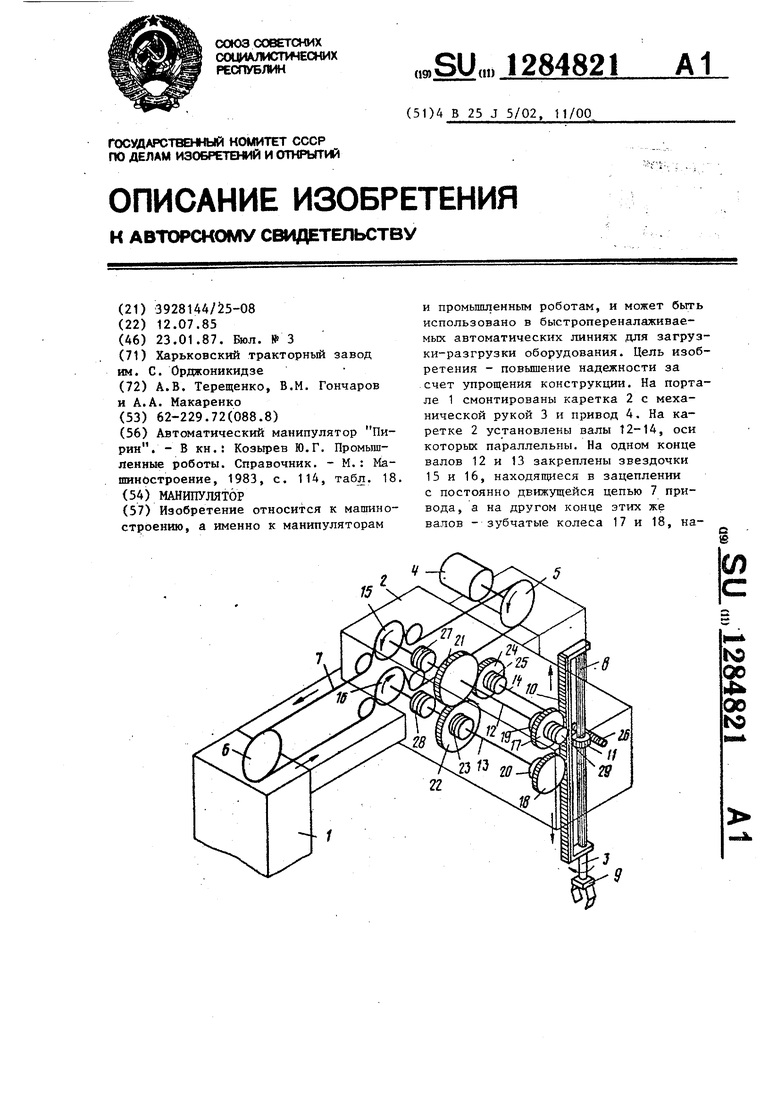
| Автоматический манипулятор Пи- рин | |||
| - В кн.: Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| - М.: Машиностроение, 1983, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
