Изобретение относится к транспортному оборудованию и может быть применено во многих отраслях промышленности, где требуются независимые и частые перемещения тяговых органов от одного двигателя, вращающегося в одном направлении.
Известен двухбарабанный привод ленточного конвейера 1, включающий двигатель с редуктором и дифференциальным механизмом, соединяющим приводные валы двух барабанов, различных по диаметру. При этом привод снабжен установленными на приводных валах управляемыми тормозами и обгонными муфтами.
Данный привод не обеспечивает независимых перемещений тяговых органов.
Известен привод конвейеров, выбранный в качестве прототипа, имеющий двигатель и редуктор, содержащий две передачи с четным и нечетным числами зубчатых колес, ведущий и ведомый валы, на которые насажены зубчатые колеса. В передаче с четным числом зубчатых колес последние посажены на вал свободно и снабжены той сцепления, установленной между валом и зубчатым колесом 2.
В данном приводе передача с нечетным числом зубчатых колес обеспечивает перемещение цепей конвейеров только в одну сторону. Для перемещения цепей в другую сторону необходимо менять направление вращения двигателя, при частых включениях которого сокращается срок его служоы.
V4 СО
ON Ю 00
Целью изобретения является расширение эксплуатационных возможностей конвейера.
Указанная цель достигается тем, что привод конвейера, включающий двигатель, кинематически соединенный с ведущим составным валом, редуктор, ведомая шестерня которого закреплена нэ ведомом составном валу с ведущими звездочками для двух тяговых цепей,- а ведущая - кинематически связана с ведущим составным валом, и муфты сцепления, расположенные между частями составных ведущего и ведомого валов для их соединения, снабжен цеп- ной передачей, одна звездочка которой закреплена на ведущем составном валу, а другая - на валу ведущей шестерни редуктора. При этом ведомые звездочки тяговых .органов установлены на концевых частях ведущего составного вала, а муфты сцепления расположены по обе стороны от двигателя и редуктора, который выполнен одноступенчатым, причем одна из указанный муфт сцепления на ведущем составном валу расположена между звездочкой цепной передачи и ведомой звездочкой тягового органа.
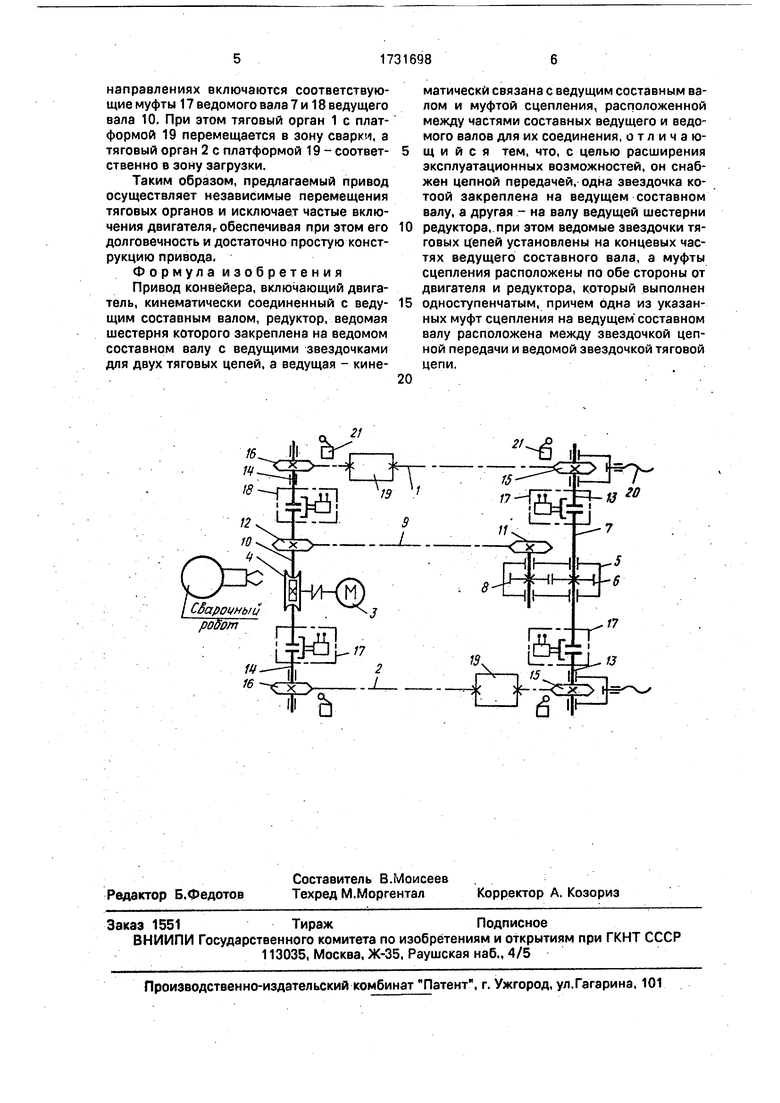
На чертеже изображен привод конвейера.
Привод конвейера включает два тяговых органа 1 и 2, двигатель 3 с редуктором 4, например червячный, одноступенчатый цилиндрический редуктор 5 с передаточным отношением I 1, в котором ведомая шестерня 6 закреплена на ведомом составном валу 7, другая ведущая шестерня 8 через цепную передачу 9 связана с ведущим составным валом 10. В цепной передаче 9 звездочка 11 закреплена на валу ведущей шестерни 8, а звездочка 12 на валу 10. Ведомый составной вал 7 включает концевые части 13, а ведущий составной вал 10 - концевые части 14. На концевых частях 13 ведомого вала 7 установлены ведущие звездочки 15, на концевых частях 14 ведущего вала 10 - ведомые звездочки. 16 тяговых органов 1 и 2. По обе стороны от двигателя 3 и редуктора 5 установлены электромагнитные муфты 17 и 18 сцепления, причем муфта 18 на валу 10 расположена между звездочкой 12 цепной передачи 9 и ведомой звездочкой 16 тягового органа 1. Муфты 17 и 18 состоят из двух поводков и подвижных дисков, которые при подаче тока соединяют соответствующие части 13 и 14 ведомого вала 7 и ведущего вала 10 для передачи крутящего момента звездочкам 15 и 16 соответствующих тяговых органов 1 и 2. Ведомый вал 7 и его концевые части 13 получают вращение от редуктора 5 через
цепную передачу 9 в сторону, противоположную вращению ведущего вала 10 с его концевыми частями 14.
Тяговые органы 1 и 2 снабжены подвижными платформами 19, с помощью которых заготовки (на чертеже не показаны) подают в зону сварки сварочного робота. Натяжение тяговых органов 1,2 и цепной лередачи 9 осуществляется с помощью грузовых вин0 тов 20, установленных на раме привода (на чертеже не показаны). Для управления перемещения тяговых органов 1 и 2 привод снабжен путевыми выключателями 21, при нажатии на которые платформами 19 соот5 ветствующими муфтами 17,18 подается сигнал на расцепление соответствующих концевых частей 13,14 ведомого составного вала 7 и ведущего составного вала 10.
Привод конвейера работает следующим
0 образом.
В исходном положении платформы 19 находятся в зоне загрузки. При этом двигатель 3 и выключатели 21 выключены, муфты 17, 18 отключены, концевые части 13 и 14
5 составных валов 7 и 10 р асцеплены, а редуктор 5 и цепная передача 9 работают вхолостую.
После загрузки платформы 19 оператор подает команду, например, на включение
0 муфты 18, подвижные диски которой соединяют соответствующую ей часть 14 ведущего вала 10. При этом другие муфты отключены. Крутящий момент от двигателя 3 и редуктора 4 через ведущий вал 10 пере5 дается тяговому органу 1, который перемещает платформу 19 в зону сварки. При этом цепная передача 9 и редуктор 5 работают вхолостую. Платформа 19, дойдя до соответствующего выключателя 21, нажимает на не0 го и останавливается, отключается муфта 18 и часть 14 ведущего вала 10 расцепляется. Одновременно подается команда сварочному роботу на сварку очередных заготовок,- После сварки заготовки от программы сва5 рочного робота подается команда соответствующей муфте 17 на перемещение платформы 19 из зоны сварки в зону загрузки. Крутящий момент от двигателя 3 и редуктора 4 через цепную передачу 9.. редуктор 5
0 и ведомый вал 7 передается ведущей звездочке 15 тягового органа 1, который перемещает платформу 19 в зону загрузки.
При необходимости перемещения одновременно обеих платформ 19 в зону свар5 ки включаются обе муфты 17, 18 ведущего составного вала 10, а при возвращении платформы 19 в зону загрузки включаются обе муфты 17 ведомого вала 7.
В случае перемещения тяговых органов 1 и 2 с платформами 19 в противоположных
направлениях включаются соответствующие муфты 17 ведомого вала 7 и 18 ведущего вала 10. При этом тяговый орган 1 с платформой 19 перемещается в зону сварки, а тяговый орган 2 с платформой 19 - соответственно в зону загрузки.
Таким образом, предлагаемый привод осуществляет независимые перемещения тяговых органов и исключает частые включения двигателяг обеспечивая при этом его долговечность и достаточно простую конструкцию привода.
Формула изобретения Привод конвейера, включающий двигатель, кинематически соединенный с ведущим составным валом, редуктор, ведомая шестерня которого закреплена на ведомом составном валу с ведущими звездочками для двух тяговых цепей, а ведущая - кине0
5
0
матическй связана с ведущим составным валом и муфтой сцепления, расположенной между частями составных ведущего и ведомого валов для их соединения, отличающийся тем, что, с целью расширения эксплуатационных возможностей, он снабжен цепной передачей, одна звездочка ко- тоой закреплена на ведущем составном валу, а другая - на валу ведущей шестерни редуктора, при этом ведомые звездочки тяговых цепей установлены на концевых частях ведущего составного вала, а муфты сцепления расположены по обе стороны от двигателя и редуктора, который выполнен одноступенчатым, причем одна из указанных муфт сцепления на ведущем составном валу расположена между звездочкой цепной передачи и ведомой звездочкой тяговой цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРАЛЬНЫЙ РЕДУКТОР КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2392159C1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2388639C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ЗВЕЗДОЧЕК ЦЕПНЫХ ПРИВОДОВ | 2004 |
|
RU2343279C2 |
| Станок для резки волокна на мерные заготовки | 1987 |
|
SU1460051A1 |
| Силовая передача мотокультиватора | 2023 |
|
RU2814605C1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| Устройство для синхронной заливки форм на литейных конвейерах | 1982 |
|
SU1071362A1 |
| Конвейер для перегрузки штучных грузов | 1980 |
|
SU918194A1 |
Использование: привод для конвейерного транспорта позволяет расширить эксплуатационные возможности конвейера. Привод конвейера включает двигатель 3, кинематически соединенный с ведущим составным валом 10, редуктор 4, ведомая шестерня 6 которого закреплена на ведомом составном валу 7 г, ведущими звездочками 15 для двух тагозых цепей 1 и 2, а ведущая 8 кинематически связана с ведущим валом 10 , и муфты сцепления, расположенные между частями ведущего вала 10 и ведомого составного вала 7 для их соединения. Привод конвейера снабжен цепной передачей 9, одна звездочка 11 которой закреплена на ведущем валу 10, а другая - 12 - на валу ведущей шестерни редуктора 8. При этом ведомые звездочки 16 тяговых цепей 1 и 2 установлены на концевых частях ведущего составного вала 10, а муфты 17 и 18 расположены по обе стороны от двигателя 3 и редуктора 4, который выполнен Одноступенчатым, причем одна из муфт сцепления на ведущем составном валу 10 расположена между звездочкой 12 цепной передачи 9 и ведомой звездочкой 16 тяговой цепи 1. Путем включения и выключения соответствующих муфт сцепления осуществляется перемещение грузов в одном и в противоположных направлениях. 1 ил. у Ј
СЁаррцныи робот
Г7го
| Двухбарабанный привод ленточного конвейера | 1986 |
|
SU1377226A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Привод конвейеров | 1978 |
|
SU716919A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
