Изобретение относится к машиностроению, а именно к конструкциям манипуляторов и промышленных роботов, а также к самоходным тележкам робототехнических комплексов и межцехового транспорта.
Цель изобретения - повышение динамической точности за счет введения жестких связей.
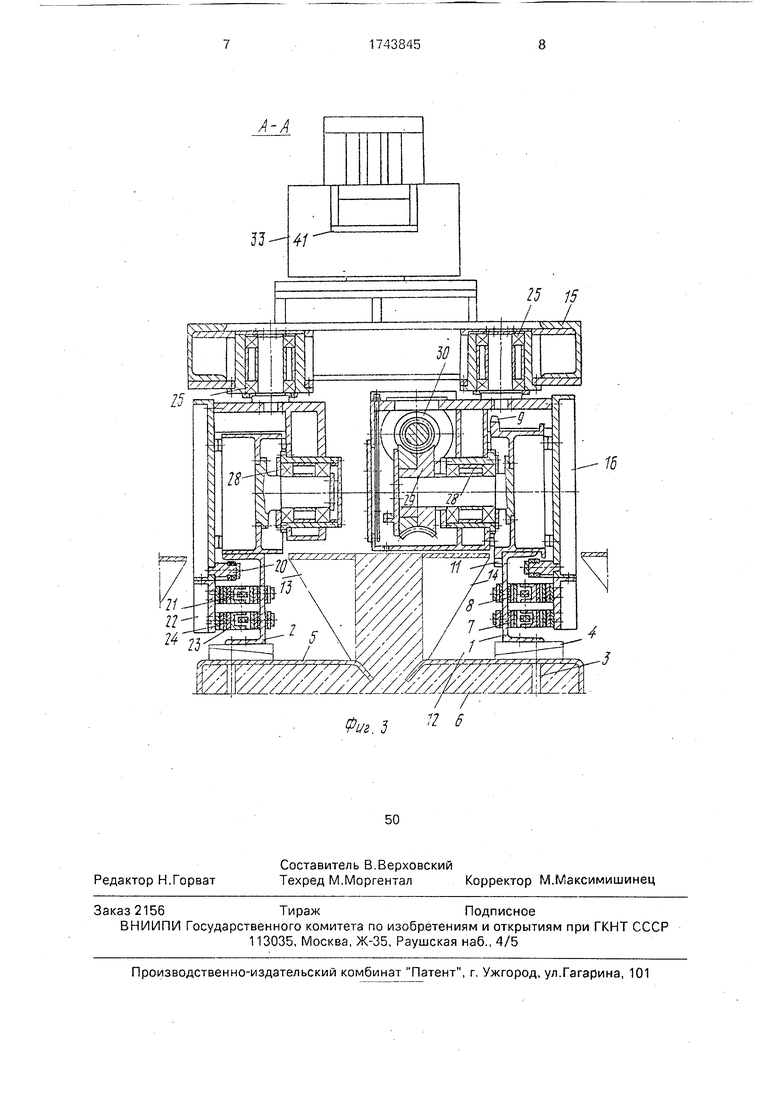
На фиг.1 показана кинематическая схема транспортного промышленного робота; на фиг.2 - ходовая тележка; на фиг.З - разрез А-А на фиг.2.
Транспортный промышленный робот содержит рельсы 1 и 2, болтами 3 прикрепленные через подкладки 4 к пластинам 5, установленным на бетонном основании 6. На рельсах 1 и 2 через изоляторы 7 смонтированы шины 8, а на направляющем рельсе 1 по шагу звездочки 9 ведущего колеса 10
неподвижно смонтированы калиброванные пальцы 11. Полости 12 рельсов 1 и2 закрыты щитками 13, которые закреплены на опорах 14. Платформа 15 ходовой тележки соединена с рельсами через индивидуальные шарнирные держатели 16, ведущее колесо 10, направляющее колесо 17 и поддерживающие колеса 18 и 19. На держателях 16 смонтированы предохранительные ролики 20, плоские пружины 21, а на них через крестовые шарниры 22 присоединены токосье.м- ные щетки 23 с контактами 24. На ведущем колесе установлена цепная звездочка 9. Шарнирные держатели 16 установлены на платформе посредством подшипников качения 25 и оба конца платформы соединены попарно и шарнирно между собой с помощью тяг 26 и подшипников качения 27. На шарнирах-держателях через подшипники
VI
4
СА 00 СЛ
28 установлены на платформу несущие колеса 10-19, а на оси ведущего колеса 10 смонтировано червячное колесо 29, имеющее зацепление с червяком 30 и соединен- ное с приводным двигателем 31 постоянного тока, который также установлен на том же держателе 16. На верхней плоскости платформы 15 неподвижно укреплено основание 32 вращающейся рамы 33 манипулятора транспортного робота. Основание 32 и рама 33 между собой соединены подшипниками качения 34, а также связаны с червячным колесом 35, которое укреплено на раме, и червяком 36, причем последний смонтирован на верхней плоскости платформы 15, как и основание 32. Червяк 36 соединен с приводным двигателем постоянного тока 37. На платформе 15 рядом с вращающейся рамой 33 манипулятора с одной стороны установлен шкаф 38 для электрооборудования и системы управления, а с другой оборудована площадка 39 для размещения перевозимого груза.
На одном конце манипулятора 40 промышленного робота смонтирован захват 41 для переноса ящиков 42 с заготовками и деталями. Привод поворота захвата вокруг вертикальной его оси содержит электродвигатель постоянного тока 43, червяк 44 и червячное колесо 45, неподвижно укрепленное на оси поворота захвата 41. Другой руки шарнирно через подшипники качения 46 и 47 укреплен на кривошипах 48 и 49 двух механизмов 33, смонтированных так, что кривошипы 48 и 49 закреплены на осях 50 и 51, которые через подшипники 52 и 53 укреплены на осях 54 и 55 соответствующих механизмов, Оси 54 и 55 через подшипники 56 и кривошипы 57 и 58 соединены тягами 59 и 60 так, что кривошипы 57 и 58, а также тяги 59 и 60 по углу вращения осей сдвинуты на 90°. Привод звеньев состоит из электродвигателя постоянного тока 61, смонтированного на раме 33, червяка 62 и червячного колеса 63. Оси 50 и 51 подшипниками 64 через идентичные кривошипы 65 соединены одинаковыми тягами 66 и приводными осями 67 и 68. Тяги 66 одна относительно другой также сдвинуты на угол 90 . Приводные оси 67 и 68 между собой соединены аналогично, как и оси 54 и 55, тягами 69 и 70. Приводной двигатель 71 осей сателлитов 50 и 51 установлен на раме 33 и через червяк 72 и червячное колесо 73 связан с приводной осью 67. Противовес 74 тросом 75 через ролики 76(установленные на раме 33, соединен с манипулятором 40. Система управления 77 установлена на платформе 15.
Транспортный промышленный робот работает следующим образом.
Платформа 15 с помощью колес 10, 17- 19 перемещается по рельсам 1 и 2 с помощью электродвигателя 31 постоянного тока. От опрокидывания платформу при воз- можных боковых перегрузках предохраняют ролики 20, Поскольку ведущее колесо 10 и направляющее колесо 17 обхватывают рельс 1 с обеих сторон и могут одновременно вращаться вокруг вертикальных осей де0 ржателей 16, то они обеспечивают движение тележки как на прямых участках, так и на поворотах. Проскальзывание колес ходовой тележки предотвращает цепная звездочка 9, жестко установленная на веду5 щем колесе 10 и соприкасающаяся с калиброванными пальцами 11, которые на рельсе 1 установлены по шагу звездочки. Торможение осуществляется электродвигателем 31, а при отключении тока - самотормозящей
0 червячной передачей 29 и 30. Поворот рамы 33, несущей механическую руку и захват 41, вокруг вертикальной оси осуществляет электродвигатель постоянного тока 37 через червяк 36 и червячное колесо 35. Ось 54
5 первого шарнирно-рычажного механизма приводится в движение от электродвигателя 61 через червяк 62 и червячное колесо 63, а через тяги 60 и 59 синхронно вращается и ось 55 второго механизма. Ось 51 первого
0 механизма вращается от электродвигателя 71 через червяк 72, червячное колесо 73 и тяги 66, а через одну пару тяг 66, 70 и другую пару тяг 66 синхронно передается вращение и на ось 50 второго шарнирного механизма. Поскольку механическая рука шарнирно укреплена на кривошипах 48 и 49 осей 50 и 51, то при синхронном вращении осей планетарных механизмов руки перемещается в вертикальной плоскости по нуж0 ным координатам и траекториям. Поворот захвата 41 вокруг вертикальной оси осуществляется от электродвигателя 43 через червяк 44 и червячное колесо 45. Поэтому ориентирование и перемещение захвата 41,
5 а с ним и груза 42 можно осуществить соответствующим вращением электродвигателей 37, 61, 71 и 43.
Формула изобретения 0 Транспортный промышленный робот, содержащий платформу, установленную на рельсовом пути на ходовых колесах, снабженных приводами, связанными с этими колесами, а также манипулятор, шарнирно 5 установленный на платформе и содержащий звенья и рабочий орган, соединенные друг с другом шарнирами, и приводы относительного перемещения звеньев, включающие двигатели и передаточные механизмы, отличающийся тем, что,
с целью повышения динамической точности за счет введения жестких связей, он снабжен звездочками, жестко закрепленными на ходовых колесах, а также штифтами, жестко установленными на рельсовом пути и взаимодействующими со звездочками, а каждый передаточный механизм привода звеньев манипулятора дополнительно имеет по два шарнирно-рычажных четырех- звенника, образованных дополнительно введенными двумя кривошипами, установленными соосно осям шарниров, соединяющих звенья манипулятора, и одним дополнительно введенным шатуном, шарнирно соединенным с кривошипами, причем соответствующие кривошипы обоих четырех- звенников взаимно перпендикулярны и жестко соединены между собой, при этом один кривошип каждого четырехзвенника жестко соединен с соответствующим приводом, а второй - с соответствующим звеном манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка для транспортировки листовых грузов | 1989 |
|
SU1638052A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Штабелирующая тележка | 1941 |
|
SU83996A1 |
| Промышленный робот | 1989 |
|
SU1673428A1 |
| САМОХОДНАЯ РЕЛЬСОВАЯ ТЕЛЕЖКА | 1991 |
|
RU2006400C1 |
| МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД И МАНИПУЛЯТОР ДЛЯ НЕГО | 1996 |
|
RU2111325C1 |
| Загрузочное устройство при пекарных камерах | 1934 |
|
SU43616A1 |
| Устройство для укладки гибкого полотна в стопу | 1984 |
|
SU1164182A1 |
| Устройство для замены роликоопор ленточного конвейера | 1990 |
|
SU1751112A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |

Изобретение относится к машиностроению, а именно к конструкциям манипуляторов и промышленных роботов, а также самоходных тележек робототехнических комплексов и межцехового транспорта. Цель изобретения - повышение динамической точности за счет введения жестких связей. Платформа 15 с помощью колес 10,17-19 перемещается по рельсам 1 и 2 с помощью электродвигателя. Проскальзывание колес ходовой тележки предотвращает цепная звездочка, жестко установленная на ведущем колесе 10 и соприкасающаяся с калиброванными пальцами. Ось 54 первого шарнирно-рычажного механизма приводится в движение от электродвигателя 61 через червяк 62 и червячное колесо 63. Одновременно через тяги 58 и 59 синхронно вращается и ось 55. Ось 51 вращается от электродвигателя 71 через червяк 72, червячное колесо 73 и тяги 66. Через пару тяг 67 вращение передается на ось 50 второго шарнирно-рычажного механизма. При одновременном движении осей 50 и 51 манипулятор 40 перемещается в вертикальной плоскости по нужным координатам. 3 ил. сл С
7(/
5S
Оиг1
77
Щи г г
АФиг. 3
12 6
| Промышленные роботы | |||
| Каталог, М.: НИИМаш, 1978, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
