Изобретение относится к железнодорожной автоматике и телемеханике, а именно к устройствам контроля габарита транспортных средств в местах пересечения с железной дорогой.
Инструкцией по эксплуатации железнодорожных переездов МПС России предусмотрено применение габаритных ворот перед искусственными сооружениями (1), для контроля верхнего габарита транспортных средств. Габаритные ворота устанавливаются на расстоянии Lгаб=10-15 м с обеих сторон перед искусственными сооружениями. Контроль габарита осуществляется посредством ограничительной планки, подвешенной на металлических цепочках или тросиках к металлической растяжке или металлической ферме. Ворота снабжены дорожным знаком «Ограничение высоты» и рассчитаны исключительно на внимание водителя автотранспорта, который обязан проверить (визуально) соответствие фактического габарита допустимым нормам в момент проследования через плоскость габаритных ворот. На практике же внимание водителей сконцентрировано на управлении машиной и как следствие - нередки случаи аварий, в результате которых происходит разрушение габаритных ворот, повреждение автотранспорта, а если тормозной путь Lторм>Lгаб, то последствия более значительны - возможен либо обрыв контактного провода, либо сдвиг пролетного строения путепровода. Вероятность такого исхода весьма велика. Тормозной путь автотранспорта при одинаковой скорости, например, 40 км/ч может меняться от 17 м до 80 м в зависимости от коэффициента сцепления с дорогой, который уменьшается от 0,7 при сухом асфальте до 0,2 при снегопаде.
Наиболее близким по технической сущности является устройство (2) для определения негабаритности транспортных средств, содержащее датчик начала координат, подключенный к таймеру и скоростемер, выходы таймера и скоростемера подключены к входам блока определения координаты негабаритности, к третьему входу последнего подключен блок формирования признаков негабаритности, выход блока определения координаты негабаритности связан с входом блока памяти и блоком управления.
Оно и принято за прототип. Недостатком указанного устройства является низкий уровень безопасности, обусловленный тем, что как и в других аналогичных устройствах, например, используемых на сортировочных горках (3), обнаружение препятствий производится в плоскости самих габаритных ворот, что как отмечено выше не гарантирует безопасности движения.
Техническим результатом является повышение надежности и безопасности движения в местах пересечения автомобильных дорог с искусственными препятствиями.
Сущность изобретения состоит в повышение надежности и безопасности движения за счет создания зоны предварительного контроля на дополнительном расстоянии Lконтр за плоскостью габаритных ворот, а также повышении надежности обнаружения транспортных средств с нарушениями габарита.
Для этого в состав известного устройства (2), содержащего датчик начала координат, таймер, скоростемер, блок определения координаты негабаритности, блок формирования признаков негабаритности, блок памяти и блок управления, дополнительно введены блок управления сканированием, блок сканирования, генератор опорного сигнала, приемник отраженного сигнала, селективный усилитель, блок обнаружения, датчик касания, блок окончательного контроля, блок включения исполнительных устройств, блок сигнализаторов опасности, блок извещения поезда и механизмы заграждения, причем один из выходов блока управления сканированием подключен к входу блока сканирования, к другому входу указанного блока подключен генератор опорного сигнала, выход приемника отраженного сигнала подключен к селективному усилителю, а к выходу селективного усилителя подключены блок обнаружения и один из входов блока определения координаты негабаритности, к другим входам которого подключены также выходы блока управления сканированием и генератора опорного сигнала, блок определения координаты негабаритности связан с блоком управления и блоком окончательного контроля, к входам блока окончательного контроля подключены также выходы приемников, размещенных в плоскости ворот, а выход блока окончательно контроля подключен к входу блока управления сканированием, к входу блока управления подключен выход датчика касания, выход блока управления подключен к входу блока включения исполнительных устройств, выходы последнего подключены к блоку сигнализаторов опасности, блоку извещения поезда и к механизмам заграждения.
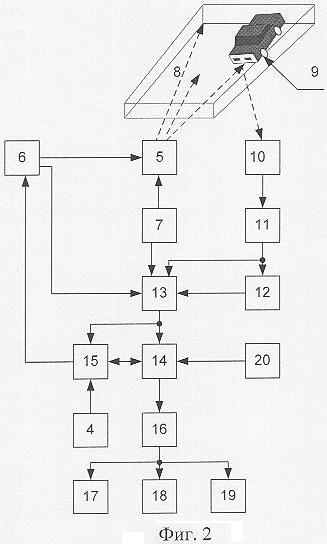
На фиг.1 представлена схема размещения элементов устройства контроля негабаритности, на фиг.2 представлена блок-схема устройства.
Заявляемое устройство содержит типовые габаритные ворота 1, в верхней части которых размещены ограничительные планки 2, на вертикальных опорах ворот размещены излучатели 3 и приемники 4. Блок 5 сканирования размещается в верхней части габаритных ворот и к входам управления указанного блока подключены выходы блока 6 управления сканированием и генератора 7 опорного сигнала. Область сканирования 8 выбрана таким образом, чтобы в нее попадали транспортные средства 9 на расстоянии Lконтр до плоскости габаритных ворот, гарантирующем надежное торможение транспортного средства перед габаритными воротами. Выход приемника 10 отраженного сигнала подключен к входу селективного усилителя 11, выход которого подключен к входу блока 12 обнаружения отраженного сигнала, выход последнего подключен к одному из входов блока 13 определения координаты негабаритности, к другим входам которого подключены выходы блока 6 управления сканированием, генератора 7 опорного сигнала и селективного усилителя 11. Выходы блока 13 определения координаты негабаритности подключены к входу блока 14 управления включением заграждающих механизмов и входу блока 15 окончательного контроля, блоки 14 управления включением заграждающих механизмов и 15 окончательного контроля связаны между собой шиной обмена данных. К входу блока 15 окончательного контроля подключены приемники 4, размещенные в плоскости ворот, а выход связан с входом блока 6 управления сканированием. Выходы блока 14 управления включением заграждающих механизмов подключены к входам блока 16 включения исполнительных устройств, к выходам которого подключены блок 17 сигнализаторов опасности, блок 18 извещения поезда и механизмы 19 заграждения. К входу блока 14 управления включением заграждающих механизмов подключен также датчик 20 касания.
Заявляемое устройство работает следующим образом. При отсутствии транспортных средств на участке приближения к габаритным воротам 1 ограничительные планки 2 не испытывают механического воздействия, а излучение от излучателей 3 беспрепятственно доходят до приемников 4. Блок 5 сканирования осуществляет поиск объектов в пределах области сканирования 8, охватывающую участок приближения к габаритным воротам, при этом алгоритм и параметры сканирования, в частности пределы области сканирования 8 определяются управляющими сигналами, поступающими от блока 6 управления сканированием. Излучаемый блоком 5 сканирования сигнал модулируется, при этом частота и фаза модулирующего сигнала жестко задаются генератором 7 опорного сигнала.
При появлении транспортного средства в пределах области сканирования 8 приемником 10 будет регистрироваться отраженный сигнал, который поступит с выхода названного приемника на селективный усилитель 11, а с выхода последнего очищенный от помех и усиленный до требуемой величины сигнал поступает на вход блока 12 обнаружения отраженного сигнала, на выходе последнего в зависимости от параметров принятого сигнала формируется сигнал логического нуля или единицы. Сигнал уровня логической единицы свидетельствует о том, что в данный момент (при данном пространственном положении луча сканера) найден физический объект. Далее по сигналам от блока 6 управления сканированием, генератора 7 опорного сигнала и селективного усилителя 11 в блоке 13 определения координаты негабаритности на основе анализа отраженных от транспортного средства 9 сигналов производится вычисление основных параметров транспортного средства (габарита, координаты, скорости и ускорения). Блок 13 определения координаты негабаритности реализован на базе микропроцессора, что существенно упрощает стандартные вычислительные процедуры (скорости по разности частот падающего и отраженного сигналов по формуле эффекта Доплера и расстояния по фазовому сдвигу и т.д.), результатом которых является вычисление текущих координат габарита и расчет времени ожидаемого проследования данного транспортного средства через плоскость габаритных ворот. Полученные данные передаются в блок 14 управления включением заграждающих механизмов, также выполненный на базе микропроцессора.
Если максимальные значения расчетных параметров не выходят за допустимые уровни, а также если фактические значения этих параметров, определенные посредством блока 15 окончательного контроля на основе анализа сигналов от приемников 4, уже во время проследования плоскости ворот, согласуются с расчетными, то на выходах блока 14 управления включением заграждающих механизмов формируются управляющие сигналы соответствуют исходному уровню - до появления транспортного средства. Техническая реализация блока 14 управления включением заграждающих механизмов и блока 15 окончательного контроля на базе микропроцессора позволяет применить алгоритмы сравнения расчетных и фактически измеренных данных, основанные на методах корреляционного анализа, что в свою очередь гарантирует высокую надежность принятия решений.
В том случае, если будет выявлена устойчивая статистическая зависимость, свидетельствующая о существенном расхождении расчетных и фактически измеренных данных, блок 15 окончательного контроля вырабатывает сигнал коррекции, который поступает на корректирующий вход блока 6 управления сканированием.
При появлении в области сканирования 8 транспортного средства 9, габариты которого превышают допустимые максимальные значения, блок 14 управления включением заграждающих механизмов выдаст соответствующий сигнал на вход блока 16 включения исполнительных устройств в блоке 17 сигнализаторов опасности. По этому сигналу включаются световые и звуковые сигнализаторы, предупреждающие водителя о недопустимости дальнейшего движения. Тем самым опасная ситуация может быть ликвидирована уже на стадии возникновения.
Если транспортное средство не будет остановлено до плоскости ворот, то создается реальная угроза безопасности, что фиксируется блоком 15 окончательного контроля. В этом случае по сигналу с блока 15 окончательного контроля в блок 14 управления включением заграждающих механизмов формируется сигнал, по которому блок 16 включения исполнительных устройств помимо включения блока 17 сигнализаторов опасности обеспечивает включение блока 18 извещения поезда и срабатывание механизмов 19 заграждения. Тем самым, приближающийся поезд получает сигнал запрета дальнейшего движения, а механизмы заграждения препятствуют дальнейшему продвижению транспортного средства в направлении искусственного сооружения. Аналогичным образом блок 14 управления включением заграждающих механизмов реагирует на сигнал датчика 20 касания к ограничительной планке 2.
В целом применение данного устройства позволяет предупредить развитие предпосылок аварийной ситуации в реальную аварию, свести к минимуму возможные негативные социально-экономические последствия.
Литература
1. Инструкция по эксплуатации железнодорожных переездов МПС России, «Транспорт», 21.07.97 г. - 103 с.
2. Устройство для определения негабаритности транспортных средств. Шевандин М.А., Анненков A.M., Жуков В.И., Левин Б.А., Волков А.В. А.С. №118 1925 по кл. МПК В61К 9/02, опубл. Б.И. №36 от 30.09.85 г.
3. Устройство для определения негабаритности транспортных средств. Код ГРНТИ 732985 от 27.11.2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ СОСТАВИТЕЛЯ ПОЕЗДОВ В ЗОНЕ НЕГАБАРИТНЫХ МЕСТ | 2004 |
|
RU2301169C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА | 2012 |
|
RU2519607C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДАХ | 2006 |
|
RU2330774C2 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНО-ГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2021 |
|
RU2764816C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
Изобретение относится к области транспорта и направлено на усовершенствование средств для контроля негабаритности транспортных средств. Устройство содержит датчик начала координат, блок определения координаты негабаритности, блок памяти и блок управления. Кроме того в него введен блок сканирования и блок управления сканированием, посредством которых осуществляется сканирование в горизонтально расположенной на высоте плоскости. Это позволяет обнаруживать нарушение верхнего габарита транспорта еще за 15-20 м до пересечения последним плоскости габаритных ворот. Факт нарушения регистрируется фотоприемниками и через блок управления включает предупредительную звуковую и световую сигнализацию, также размещаемую на габаритных воротах. Таким образом, водитель предупреждается о недопустимости дальнейшего движения. Технический результат заключается в обеспечении выдачи машинисту приближающегося поезда предупреждения о наличии постороннего объекта на переезде или возможном повреждении путепровода, что позволяет свести к минимуму аварийность по причине нарушения автотранспортом верхнего габарита. 2 ил.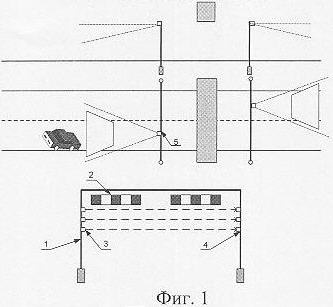
Устройство для контроля негабаритности транспортных средств, содержащее типовые габаритные ворота, в верхней части которых размещены ограничительные планки, а также излучатели и приемники, подключенные к блоку определения координаты негабаритности, выход которого связан с блоком памяти и блоком управления включением заграждающих механизмов, отличающееся тем, что дополнительно введены блок управления сканированием, блок сканирования, генератор опорного сигнала, приемник отраженного сигнала, селективный усилитель, блок обнаружения, датчик касания, блок окончательного контроля, блок включения исполнительных устройств, блок сигнализаторов опасности, блок извещения поезда и механизмы заграждения, причем один из выходов блока управления сканированием подключен к входу блока сканирования, к другому входу указанного блока подключен генератор опорного сигнала, выход приемника отраженного сигнала подключен к селективному усилителю, а к выходу селективного усилителя поключены блок обнаружения и один из входов блока определения координаты негабаритности, к другим входам которого подключены также выходы блока управления сканированием и генератора опорного сигнала, блок определения координаты негабаритности связан с блоком управления включением заграждающих механизмов, к входам блока окончательного контроля подключены выходы приемников, размещенных в плоскости ворот, а выход блока окончательного контроля подключен к входу блока управления сканированием, к входу блока управления включением заграждающих механизмов подключен выход датчика касания, а выход блока управления включением заграждающих механизмов подключен к входу блока включения исполнительных устройств, причем выходы последнего подключены к блоку сигнализаторов опасности, блоку извещения поезда и к механизмам заграждения.
| Устройство для определения негабаритности транспортных средств | 1984 |
|
SU1181925A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| DE 4015086 A1,17.01.1991 | |||
| МОДУЛЬ ПОЖАРОТУШЕНИЯ ТОНКОРАСПЫЛЕННОЙ ОГНЕТУШАЩЕЙ ЖИДКОСТЬЮ | 2012 |
|
RU2494780C1 |

