Изобретение относится к железнодорожному транспорту, а именно, к автоматизированным устройствам для определения габаритности перевозимых грузов, выявления негабаритности и локализации места ее расположения.
Известно устройство для контроля негабаритности грузов на подвижном составе (Ю.М. Кравченко. Железнодорожный путь: часть 1. Габариты. - Екатеринбург: Изд-во УрГУПС, 2014. 30 с), содержащее вертикальные стойки с поворотными элементами, образующими контур габарита погрузки и установленными независимо друг от друга.
Недостатком данного устройства является ограничение скорости движения контролируемого подвижного состава из-за механического контакта подвижных элементов с негабаритным грузом, низкая надежность визуального контроля негабаритности.
Известно контрольно-габаритное устройство (КГУ), сигнализирующее о грузах, вышедших в пути следования за очертания допускаемого габарита (Камзолова Д. Испытано на себе. Железнодорожник Поволжья, №4, 2014 г.), представляющее собой проволочный контур по очертанию утвержденного габарита, укрепленный на железобетонных опорах. Такие устройства устанавливаются перед важными сооружениями - мостами или тоннелями. Контрольная проволока образует электрическую сигнальную цепь с контрольным электромеханическим реле, находящимся на станции. В случае выхода груза за очертание габарита контрольная проволока разрывается. При обрыве проволоки контрольное реле обесточивается, от чего на станции включается оповестительная сигнализация (звонки и лампы), а на ограждающих мост или тоннель светофорах загораются красные огни.
Контрольный контур из проволоки закрепляется при помощи наконечников на консолях. Консоли, в свою очередь, крепятся к отдельно стоящим стойкам или опорам с жесткой поперечиной. На участках с электротягой контактная сеть и токосъемные устройства не позволяют проложить проволочный контур по верхней грани подвижного состава, поэтому он охватывает контролем одну сторону поезда. Для контроля другой стороны поезда устанавливается аналогичное устройство (ИССЛЕДОВАНИЕ ЭФЕКТИВНОСТИ СИСТЕМ КОНТРОЛЯ ГАБАРИТОВ ПОДВИЖНОГО СОСТАВА II Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ: Сб. ст.по мат.XVII междунар. студ. науч.-практ.конф. №2(17). [Электронный ресурс] - Режим доступа. - URL:http://sibac.info/archive/technic/2(17).pdf.)
Недостатками этой системы является необходимость выполнения операции восстановления контрольного контура после каждого обрыва проволоки выступающими за допустимый габарит элементами груза, ослабление креплений ригелей на мачте и проволоки в наконечниках, приводящее к провису проволоки и соответствующему снижению точности определения негабарита
Известно устройство для контроля негабаритности груза подвижного состава (RU 2066282, B61K 9/02), содержащее П-образные ворота, установленные над рельсовым путем, датчик наличия состава, датчик счета вагонов, пять датчиков контроля габарита подвижного состава, имеющих оптоэлектронные каналы, проложенные на внутренних сторонах стоек и перекладины ворот по контуру верхнего очертания максимально допустимого габарита вагона, включающие в себя инфракрасные излучатель и фотоприемник, блок сопряжения, входы которого связаны с выходами датчиков габарита подвижного состава, а выходы - с входом средства обработки и записи информации, выход которого подключен к входу блока индикации, введены телевизионная камера, шарнирно закрепленная на перекладине ворот с возможностью фиксирования ее положения и сканирования в плоскости створа ворот и в вертикальной плоскости, проходящей вдоль рельсового пути, и видеомагнитофон. Датчики наличия состава и счета вагонов имеют оптоэлектронные каналы, аналогичные каналам датчиков габарита состава, и выходами подключены к входам блока сопряжения, выход которого соединен с входом средства обработки и записи, а выход телевизионной камеры связан через блок сопряжения и средство обработки и записи информации с видеомагнитофоном.
Недостаток устройства заключается в низкой надежности контроля из-за многоприборности и сложности общей схемы устройства, создании дополнительных помех из-за атмосферных явлений, ручного запуска работы устройства. Использование телекамеры и видеомагнитофона для визуального контроля состояния крепежа, качества закрепления и типа груза не является необходимым для контроля габаритов погрузки и усложняет техническую сторону устройства.
Наиболее близким по технической сущности к заявляемому изобретению является устройство контроля габаритов грузов и подвижного состава в процессе их движения (RU 262365, B61K 9/02). Указанное устройство содержит лазерные триангуляционные датчики со встроенной микропроцессорной системой управления, П-образную раму, оборудованную кронштейнами и выносными опорами, прикрепленными к стойкам П-образной рамы. Стойки и перекладина П-образной рамы выполнены в виде ферм, снабженных кабель-каналами и кронштейнами для крепления датчиков. По периметру П-образной рамы установлены лазерные триангуляционные датчики контроля габарита со встроенной микропроцессорной системой управления. В створе П-образной рамы на высоте 1080 мм от уровня головки рельса на выносных опорах, прикрепленных к ферме П-образной рамы на уровне рамы кузова вагона, размещен датчик наличия состава, на высоте 2300 мм от уровня головки рельса - оптико-электронное устройство распознавания и фиксирования номеров вагонов. Выходы микропроцессорных систем управления всех шестнадцати датчиков контроля габарита, выходы сканера и датчика наличия состава подключены к единой системе обработки данных, которая автоматически запускается с момента срабатывания датчика наличия состава. Обработка показаний всех датчиков осуществляется в режиме реального времени, а результаты анализа поступают на диспетчерский пульт. В результате повышается надежность контроля габаритов, упрощается монтаж датчиков, обеспечивается автоматизация работы устройства.
Недостатками устройства-прототипа являются:
- невозможность представления оператору изображений обнаруженных сканирующими лазерными дальномерами негабаритностей для их немедленного анализа и принятия решения о возможности дальнейшего движения поезда или его аварийной остановки;
- отсутствие возможности архивирования изображений выявленных нарушений для их последующего анализа и выявления причин их возникновения, а также передачи по каналам связи АСУ железной дороги.
Для реализации цели изобретения в устройство введены три цифровые фотоаппарата, три импульсных осветителя, расположенные на боковых стойках и поперечине П-образной рамы, а также селектор, соединенный с ПЭВМ, три сумматора видеосигналов, три синтезатора изображений сигнальной метки, три коммутатора видеосигналов, а также контрольный монитор. При этом выходы цифровых фотоаппаратов через последовательно соединенные соответствующие сумматоры видеосигналов и коммутаторы видеосигналов соединены с контрольным монитором. Свободные входы сумматоров видеосигналов соединены с выходами соответствующих синтезаторов изображений сигнальной метки, управляющие входы которых соединены с соответствующими выходами селектора, соединенными также с управляющими входами соответствующих цифровых фотоаппаратов, управляющими входами импульсных осветителей и управляющими входами соответствующих коммутаторов, при этом соответствующие выходы ПЭВМ соединены с управляющими входами соответствующих синтезаторов изображений сигнальной метки.
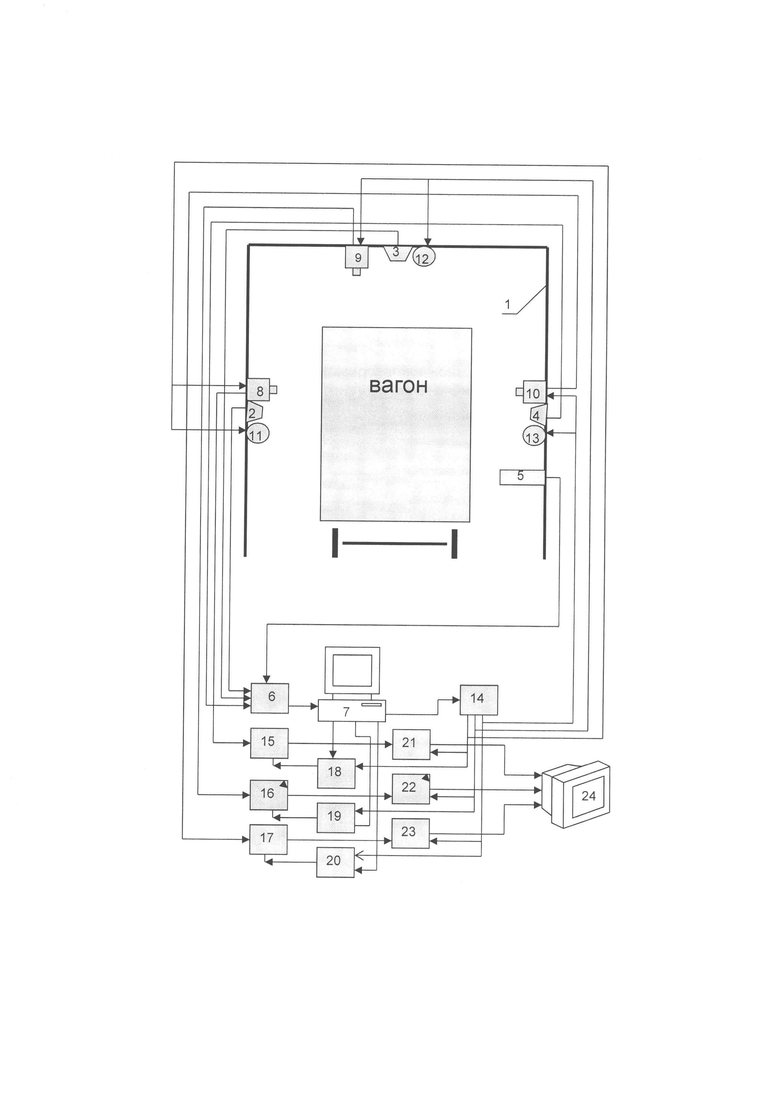
При реализации цели изобретения автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов содержит П-образную раму 1 (чертеж), установленную над железнодорожным путем, с размещенными на ней тремя сканирующими лазерными дальномерами 2, 3, 4 со встроенными вычислителями, установленными на боковых стойках и поперечине П-образной рамы 1, а также оптико-электронный датчик 5 начала состава и счета вагонов. При этом вычислители сканирующих лазерных дальномеров 2, 3 и 4, а также выход оптико-электронного датчика 5 начала состава и счета вагонов через мультипортовую плату 6 соединены с ПЭВМ 7. Кроме того, имеются три цифровые фотоаппарата 8, 9 и 10, три импульсных осветителя 11, 12 и 13, расположенные на боковых стойках и поперечине П-образной рамы 1, а также селектор 14, соединенный с ПЭВМ 10, три сумматора видеосигналов 15, 16 и 17, три синтезатора изображений 18, 19 и 20 сигнальной метки, три коммутатора видеосигналов 21, 22 и 23, а также контрольный монитор 24. При этом выходы цифровых фотоаппаратов 8, 9 и 10 через последовательно соединенные соответствующие сумматоры 15, 16 и 17 видеосигналов и коммутаторы 21, 22 и 23 видеосигналов соединены с контрольным монитором 24. Свободные входы сумматоров видеосигналов 15, 16 и 17 соединены с выходами соответствующих синтезаторов 18, 19 и 20 изображений сигнальной метки, управляющие входы которых соединены с соответствующими выходами селектора 14, соединенными также с управляющими входами соответствующих цифровых фотоаппаратов 8, 9 и 10, управляющими входами импульсных осветителей 11, 12 13 и управляющими входами соответствующих коммутаторов 21, 22, 23, при этом соответствующие выходы ПЭВМ 10 соединены с управляющими входами соответствующих синтезаторов 18, 19 и 20 изображений сигнальной метки.
При реализации устройства могут быть реализованы следующие технические решения. Рама 1 аналогична несущей конструкции, используемой в габаритных воротах, в частности, в комплексе коммерческого осмотра грузов АСКО ПВ производства НПК «Автоматизация». В качестве сканирующих лазерных дальномеров 2, 3, 4 могут быть использованы устройства фирмы «HOKUYO» (Япония), например, сканирующий лазерный дальномер UXM-30LX-EW, обеспечивающий измерение расстояний до 30 м с точностью 1 мм при угле сканирования 190°. Указанный сканирующий лазерный дальномер имеет встроенный вычислитель.
В качестве оптико-электронного датчика начала состава и счета вагонов 5 может быть использован однолучевой лазерный дальномер производства НПК «Автоматизация» ФКНП.468166.001 или его аналог иностранного производства.
В качестве ПЭВМ 7 можно использовать типовую ПЭВМ с соответствующим программным обеспечением и многоканальным входом - мультипортовой платой 6. Монитор 24 - жидкокристаллический монитор, например, типа ВМЦ - 38.3 со встроенным динамиком. Цифровые фотоаппараты 8, 9, 10 - серийные, установленные в герметичных термостатированных кожухах. Импульсные осветители 11, 12 и 13 выполнены на основе импульсных ламп серии ИФК. Селектор 14 может быть построен по схеме многовходового электронного коммутатора на аналоговом переключателе КР590КН8А. Сумматор видеосигналов - Сагах VCS CRR-6001 на три видеовхода. Синтезаторы 18, 19 и 20 изображения сигнальной метки могут быть построены по принципу формирования фигур вытеснения по методологии, изложенной в (Гуглин И.Н. Телевизионные игровые автоматы и тренажеры. М.: Советское радио, 1978 г.).
Программное обеспечение ПЭВМ 7 обеспечивает, в частности, выполнение следующих функций:
- прием информации о количестве локомотивов в составе по локальной сети от автоматизированной системы управления сортировочной станции;
- прием и хранение информации о нормальных габаритах вагонов в составе;
- прием, формирование и передача информации о негабаритностях погрузки вагонов;
- фиксация начала состава, промежутков между вагонами и негабаритности;
- сравнение трехмерного изображения поверхности вагона и груза, определенного сканирующими лазерными дальномерами с информацией о допустимом габарите и выявление опасной негабаритности, определение места ее локализации и формирование соответствующего сигнала на селектор 14 для включения соответствующего цифрового фотоаппарата, синтезатора изображения сигнальной метки и коммутатора;
- исходя из места локализации негабаритности в кадре цифрового фотоаппарата формирование управляющих сигналов на соответствующий синтезатор сигнальной метки, определяющих местоположение и размер сигнальной метки;
- запись на жесткий диск кадров с цифровых фотоаппаратов и хранение архива изображений в объеме, ограниченном емкостью жесткого диска;
- просмотр видеоархива на экране ПЭВМ;
- покадровый просмотр и режим стоп-кадра;
- подключение к единой автоматизированной системе актово-претензионной работы (ЕАСАПР) железной дороги для передачи данных о выявленных негабаритностях в прошедшем составе в сеть ОАО «РЖД» для последующей обработки полученной информации;
- поиск видеоинформации по времени прохождения состава, номеру состава, порядковому номеру вагона;
- вывод на экран контуров поперечного сечения вагонов состава для их детального анализа.
- выделение обнаруженных негабаритностей и отправка изображений с пометками по электронной почте;
- осуществление поиска в видеоархиве по номеру/индексу поезда, диапазону времени и дат, признаку наличия негабаритов;
- автоматическое ведение книги регистрации негабаритностей вагонов в поездах.
При реализации цели изобретения устройство работает следующим образом.
Оператор, получив информацию о приближении состава к зоне контроля, вводит в ПЭВМ 7 данные о количестве локомотивов в составе и номер состава или указанные данные передаются на ПЭВМ 7 по локальной сети от автоматизированной системы управления станции автоматически. При входе состава в зону контроля локомотив пересекает луч от однолучевого лазерного дальномера 5, играющего роль датчика начала состава и датчика промежутков между вагонами, при этом информация о пересечении луча поступает в ПЭВМ 7, которая начинает отсчет вагонов. ПЭВМ 7 осуществляет счет вагонов в зоне контроля по перекрытию луча однолучевого лазерного дальномера 5 и формирует порядковый номер вагона. При этом одновременно идентифицируется тип проверяемого вагона, исходя из последовательности вагонов в поезде, записанной в памяти ПЭВМ 7.
Сканирующие лазерные дальномеры 2, 3 и 4 обеспечивают детальное определение как наличия негабаритностей, так и их формы и места локализации. Указанные дальномеры выполняют сканирование в заданных секторах, определяемых геометрией их размещения и высотой вагона. Встроенные в дальномеры 2 и 4 вычислители строят изображения контуров боковых стенок вагона, а встроенный в дальномер 3 вычислитель -изображение рельефа крыши вагона, либо изображение рельефа расположенного в полувагоне или на платформе груза. Изображения рельефов боковых стенок и крыши вагона (груза в полувагоне или на платформе) объединяются в ПЭВМ 7 в единый контур вагона для формирования изображения поперечного сечения контура вагона (боковых стенок и груза в полувагоне). Информация о поперечном сечении контура вагона в ПЭВМ 7 сравнивается с допустимом на данном участке движения железнодорожном габарите, заранее поступившей в ПЭВМ 7. При превышении границы зоны габаритности ПЭВМ 7 определяет место локализации негабарита (правый борт, левый борт, крыша или насыпной груз в полувагоне), определяет его место в кадре соответствующего цифрового фотоаппарата 8, 9 или 10. При этом следует учитывать, что обнаружение негабарита происходит в момент ее нахождения в вертикальной плоскости сканирования соответствующего сканирующего лазерного дальномера, а указанная плоскость лежит в плоскости П-образной рамы 1. При монтаже цифровых фотоаппаратов 8, 9 и 10 их оптические оси ориентируют в плоскости П-образной рамы 1. При работе встроенных вычислителей сканирующих лазерных дальномеров 2, 3 и 4, также ПЭВМ 7 в реальном масштабе времени обнаружение негабарита происходит в момент его прохождения плоскости П-образной рамы.
При обнаружении негабарита ПЭВМ 7 формирует управляющий сигнал, который полается на селектор 14 и содержит информацию о том, в поле зрения какого из цифровых фотоаппаратов 8, 9 или 10 находится негабарит. Селектор 14 производит включение:
- соответствующего импульсного осветителя 11,12 или 13;
- соответствующего цифрового фотоаппарата 8, 9 или 10;
- соответствующего синтезатора изображения сигнальной метки 18,19 или 20;
- соответствующего коммутатора видеосигналов 21, 22 или 23.
Если негабарит обнаружен на левом борту вагона в поле зрения, селектор 14 включает указанный цифровой фотоаппарат 8, импульсный осветитель 11, синтезатор 18 и коммутатор 21. При этом цифровой фотоаппарат 8 производит съемку ярко освещенного вспышкой импульсного осветителя 11 негабарита, располагающегося в момент съемки на вертикальной оси симметрии кадра, после чего изображение хранится на карте памяти цифрового фотоаппарата 8. Съемка негабарита в момент вспышки импульсного осветителя 11 обеспечивает формирование несмазанного высококачественного изображения негабарита. Синтезатор 18 формирует изображение сигнальной метки, расположенной на вертикальной оси симметрии кадра и обрамляющей негабарит, в виде прямоугольной рамки или круга. Для лучшей заметности метка может быть выполнена мигающей с частотой около 1 Гц. Размер метки и ее местоположение по вертикали задается с ПЭВМ 7, связанной с синтезатором 18. Изображение метки накладывается на фотокадр в сумматоре видеосигналов 15, на который поступает видеосигнал кадра с карты памяти цифрового фотоаппарата 8. Суммарный (микшированный) видеосигнал через замкнутый по сигналу с селектора 14 коммутатор 21 подается на монитор 24. Одновременно может воспроизводиться тревожный сигнал в динамике монитора 24.
Для удобства работы монитор 24 может быть переведен в режим квадратора, при котором за каждым каналом (цифровым фотоаппаратом) закрепляется определенный квадрант экрана. А свободный квадрант может использоваться для ввода предупредительной или иной информации.
При обнаружении негабарита на правом борту вагона или сверху устройство работает аналогичным образом.
Без дополнительных доработок устройство, как опцию, может выполнять и функцию автоматического контроля коммерческой сохранности поездов и вагонов. При предварительной передаче со станции отправления информации о форме боковых поверхностей и крыш вагонов поезда и ее записи в память ПЭВМ 7 информация о форме боковой поверхности и крыши вагона, проходящего контроль, сравнивается в ПЭВМ 7 с записанной информацией. Эта информация выбирается из памяти ПЭВМ 7 с учетом информации о типе вагона, хранящейся в памяти ПЭВМ 7 и формируемой на основе данных о номере вагона в составе и предварительно введенных с АСУ железной дороги информации о железнодорожном составе. При обнаружении существенных отклонений в форме указанных поверхностей вагона, обусловленных наличием глубоких вмятин, проломов, незакрытых ворот ПЭВМ 7 управляющий сигнал на селектор 14, после чего устройство работает, как описано выше с той лишь разницей, что вместо негабарита на мониторе 24 воспроизводится кадр с обнаруженным нарушением коммерческой сохранности, отмеченным меткой.
Использование устройства позволяет наряду с автоматизированным обнаружением негабаритностей включить оператора в процесс их просмотра и обоснованного оперативного решения вопроса об их критичности и возможности дальнейшего движения поезда или необходимости его остановки. При этом оператор рассматривает статичное неподвижное изображение, сформированное электронным фотоаппаратом, которое по качеству существенно превосходит телевизионное изображение, предъявляемое оператору в существующих системах осмотра поездов и вагонов. Кроме того, по сравнению с существующими телевизионными системами непрерывного телевизионного контроля сохранности состава оператором использование устройства позволяет значительно уменьшить нагрузку на оператора, исключив из его деятельности необходимость постоянного наблюдения динамических изображений поверхностей подвижного состава с целью визуального выявления негабарита и его оценки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| Автоматизированный пост динамического взвешивания железнодорожных составов (АПДВ) | 2023 |
|
RU2828636C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| Способ автоматизированного учета вагонов и контейнеров в движущемся железнодорожном составе | 2022 |
|
RU2784230C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
Изобретение относится к автоматизированным устройствам для определения габаритности перевозимых грузов. Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов содержит П-образную раму, установленную над железнодорожным путем, с размещенными на ней тремя сканирующими лазерными дальномерами со встроенными вычислителями, установленными на боковых стойках и поперечине П-образной рамы, а также оптико-электронный датчик начала состава и счета вагонов, при этом вычислители сканирующих лазерных дальномеров, а также выход оптико-электронного датчика начала состава и счета вагонов через мультипортовую плату соединены с ПЭВМ. При этом также имеются три цифровых фотоаппарата, расположенные на боковых стойках и поперечине П-образной рамы, три импульсных осветителя, расположенные на боковых стойках и поперечине П-образной рамы, а также селектор, соединенный с ПЭВМ, три сумматора видеосигналов, три синтезатора изображений сигнальной метки, три коммутатора видеосигналов и контрольный монитор. Выходы цифровых фотоаппаратов через последовательно соединенные соответствующие сумматоры видеосигналов и коммутаторы видеосигналов соединены с контрольным монитором, свободные входы сумматоров видеосигналов соединены с выходами соответствующих синтезаторов изображений сигнальной метки, управляющие входы которых соединены с соответствующими выходами селектора, соединенными также с управляющими входами соответствующих цифровых фотоаппаратов, управляющими входами соответствующих коммутаторов и управляющими входами импульсных осветителей. Соответствующие выходы ПЭВМ соединены с управляющими входами соответствующих синтезаторов изображений сигнальной метки. В результате достигается автоматизация обнаружения негабаритностей. 1 ил.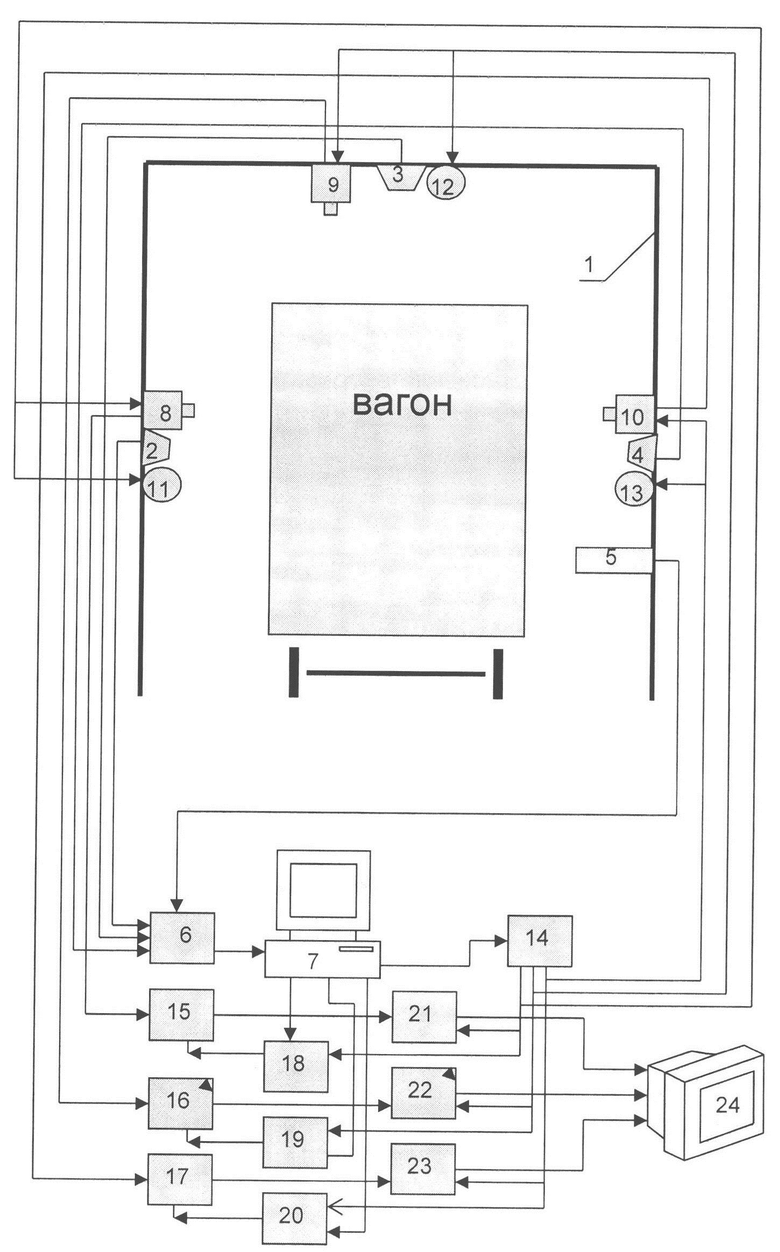
Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов, содержащее П-образную раму, установленную над железнодорожным путем, с размещенными на ней тремя сканирующими лазерными дальномерами со встроенными вычислителями, установленными на боковых стойках и поперечине П-образной рамы, а также оптико-электронный датчик начала состава и счета вагонов, при этом вычислители сканирующих лазерных дальномеров, а также выход оптико-электронного датчика начала состава и счета вагонов через мультипортовую плату соединены с ПЭВМ, отличающееся тем, что имеются три цифровых фотоаппарата, расположенные на боковых стойках и поперечине П-образной рамы, три импульсных осветителя, расположенные на боковых стойках и поперечине П-образной рамы, а также селектор, соединенный с ПЭВМ, три сумматора видеосигналов, три синтезатора изображений сигнальной метки, три коммутатора видеосигналов и контрольный монитор, при этом выходы цифровых фотоаппаратов через последовательно соединенные соответствующие сумматоры видеосигналов и коммутаторы видеосигналов соединены с контрольным монитором, причем свободные входы сумматоров видеосигналов соединены с выходами соответствующих синтезаторов изображений сигнальной метки, управляющие входы которых соединены с соответствующими выходами селектора, соединенными также с управляющими входами соответствующих цифровых фотоаппаратов, управляющими входами соответствующих коммутаторов и управляющими входами импульсных осветителей, при этом соответствующие выходы ПЭВМ соединены с управляющими входами соответствующих синтезаторов изображений сигнальной метки.
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| US 200902900757 A1, 26.11.2009 | |||
| УСТРОЙСТВО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ И ПОДВИЖНОГО СОСТАВА В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2016 |
|
RU2624365C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |

