Изобретение относится к железнодорожному транспорту, а именно к автоматизированным устройствам для определения габаритности перевозимых грузов, выявления негабаритности и локализации места ее расположения.
Известно устройство для контроля негабаритности грузов на подвижном составе (Ю.М. Кравченко. Железнодорожный путь: часть 1. Габариты. - Екатеринбург: Изд-во УрГУПС, 2014. 30 с.), содержащее вертикальные стойки с поворотными элементами, образующими контур габарита погрузки и установленными независимо друг от друга.
Недостатком данного устройства является ограничение скорости движения контролируемого подвижного состава из-за механического контакта подвижных элементов с негабаритным грузом, низкая надежность визуального контроля негабаритности.
Известно контрольно-габаритное устройство (КГУ), сигнализирующее о грузах, вышедших в пути следования за очертания допускаемого габарита (Камзолова Д. Испытано на себе. Железнодорожник Поволжья, №4, 2014 г.), представляющее собой проволочный контур по очертанию утвержденного габарита, укрепленный на железобетонных опорах. Такие устройства устанавливаются перед важными сооружениями - мостами или тоннелями. Контрольная проволока образует электрическую сигнальную цепь с контрольным электромеханическим реле, находящимся на станции. В случае выхода груза за очертание габарита контрольная проволока разрывается. При обрыве проволоки контрольное реле обесточивается, от чего на станции включается оповестительная сигнализация (звонки и лампы), а на ограждающих мост или тоннель светофорах загораются красные огни.
Контрольный контур из проволоки закрепляется при помощи наконечников на консолях. Консоли, в свою очередь, крепятся к отдельно стоящим стойкам или опорам с жесткой поперечиной. На участках с электротягой контактная сеть и токосъемные устройства не позволяют проложить проволочный контур по верхней грани подвижного состава, поэтому он охватывает контролем одну сторону поезда. Для контроля другой стороны поезда устанавливается аналогичное устройство (ИССЛЕДОВАНИЕ ЭФЕКТИВНОСТИ СИСТЕМ КОНТРОЛЯ ГАБАРИТОВ ПОДВИЖНОГО СОСТАВА // Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ: Сб. ст. по мат. XVII междунар. студ. науч.-практ. конф. №2(17). [Электронный ресурс] - Режим доступа. - URL:http://sibac.info/archive/technic/2(17).pdf.)
Недостатками этой системы является необходимость выполнения операции восстановления контрольного контура после каждого обрыва проволоки выступающими за допустимый габарит элементами груза, ослабление креплений ригелей на мачте и проволоки в наконечниках, приводящее к провису проволоки и соответствующему снижению точности определения негабарита
Известно устройство для контроля негабаритности груза подвижного состава (RU 2066282, B61K 9/02), содержащее П-образные ворота, установленные над рельсовым путем, датчик наличия состава, датчик счета вагонов, пять датчиков контроля габарита подвижного состава, имеющих оптоэлектронные каналы, проложенные на внутренних сторонах стоек и перекладины ворот по контуру верхнего очертания максимально допустимого габарита вагона, включающие в себя инфракрасные излучатель и фотоприемник, блок сопряжения, входы которого связаны с выходами датчиков габарита подвижного состава, а выходы - с входом средства обработки и записи информации, выход которого подключен к входу блока индикации, введены телевизионная камера, шарнирно закрепленная на перекладине ворот с возможностью фиксирования ее положения и сканирования в плоскости створа ворот и в вертикальной плоскости, проходящей вдоль рельсового пути, и видеомагнитофон. Датчики наличия состава и счета вагонов имеют оптоэлектронные каналы, аналогичные каналам датчиков габарита состава, и выходами подключены к входам блока сопряжения, выход которого соединен с входом средства обработки и записи, а выход телевизионной камеры связан через блок сопряжения и средство обработки и записи информации с видеомагнитофоном.
Недостаток устройства заключается в низкой надежности контроля из-за многоприборности и сложности общей схемы устройства, создании дополнительных помех из-за атмосферных явлений, ручного запуска работы устройства. Использование телекамеры и видеомагнитофона для визуального контроля состояния крепежа, качества закрепления и типа груза не является необходимым для контроля габаритов погрузки и усложняет техническую сторону устройства.
Наиболее близким по технической сущности к заявляемому изобретению является устройство контроля габаритов грузов и подвижного состава в процессе их движения (RU 262365, В61К 9/02). Указанное устройство содержит лазерные триангуляционные датчики со встроенной микропроцессорной системой управления, П-образную раму, оборудованную кронштейнами и выносными опорами, прикрепленными к стойкам П-образной рамы. Стойки и перекладина П-образной рамы выполнены в виде ферм, снабженных кабель - каналами и кронштейнами для крепления датчиков. По периметру П-образной рамы установлены лазерные триангуляционные датчики контроля габарита со встроенной микропроцессорной системой управления. В створе П-образной рамы на высоте 1080 мм от уровня головки рельса на выносных опорах, прикрепленных к ферме П-образной рамы на уровне рамы кузова вагона, размещен датчик наличия состава, на высоте 2300 мм от уровня головки рельса - оптико-электронное устройство распознавания и фиксирования номеров вагонов. Выходы микропроцессорных систем управления всех шестнадцати датчиков контроля габарита, выходы сканера и датчика наличия состава подключены к единой системе обработки данных, которая автоматически запускается с момента срабатывания датчика наличия состава. Обработка показаний всех датчиков осуществляется в режиме реального времени, а результаты анализа поступают на диспетчерский пульт. В результате повышается надежность контроля габаритов, упрощается монтаж датчиков, обеспечивается автоматизация работы устройства.
Недостатком устройства-прототипа является возможность пропуска сканирующими лазерными триангуляционными датчиками (сканирующими лазерными дальномерами) негабаритностей с небольшими поперечными размерами (размерами по ширине), причем эта возможность возрастает при увеличении скорости движения состава. Это объясняется тем, что при сканировании лазерный луч сканирующего дальномера формирует на поверхности состава наклонные линии, расстояние между которыми определяется частотой сканирования и скоростью состава. Указанное расстояние уменьшается при увеличении частоты сканирования и увеличивается при увеличении скорости состава.
Целью изобретения является расширение функциональных возможностей устройства за счет:
- повышения надежности обнаружения нарушений габаритов подвижного состава;
- выработки информации о близком к предельному смещению грузов, что может в будущем повлечь за собой возникновение аварийной ситуации;
- привязки нарушения габарита к конкретному вагону с указанием места локализации нарушения;
- повышения надежности извещения оператора за счет дублирования аварийного сообщения на мониторе срабатыванием светоакустического сигнализатора.
Указанная цель достигается тем, что имеются расположенные на одной из боковых стоек рамы и поперечине первый, второй, третий, четвертый и пятый лазерные дальномеры, ориентация в пространстве оптических осей которых соответствует линиям, ограничивающим предельные габариты вагонов, оптико-электронный датчик начала состава и счета вагонов выполнен на основе шестого лазерного дальномера, расположенного на одной из стоек П-образной рамы, оптико-электронные датчики распознавания и формирования номеров вагонов расположены на стойках П-образной рамы и выполнены на основе четырех телевизионных камер, расположенных попарно по обеим сторонам вагона на уровне рамы и середины высоты стенки вагона, имеется расположенная на поперечине П-образной рамы пятая телевизионная камера, расположенные в створе П-образной рамы динамические весы, при этом выходы первого, второго, третьего, четвертого и пятого лазерных дальномеров непосредственно соединены с системой обработки данных, а через первый, второй, третий, четвертый и пятый цифровые компараторы соответственно - со входами логического элемента «ИЛИ», выход которого связан с расположенным на диспетчерском пульте светоакустическим сигнализатором, лазерный дальномер оптико-электронного датчика начала состава и счета вагонов через цифровой компаратор соединен с системой обработки данных и управляющим входом вычислителя поперечного смещения центра тяжести вагона, входы которого соединены с динамическими весами, а выход через цифровой компаратор – с системой обработки данных, выход которой соединен с расположенными на диспетчерском пульте блоками формирования аварийной и предупредительной информации на экране монитора, при этом телевизионные камеры соединены с многоканальным видеовходом системы обработки данных.
Сущность изобретения поясняется структурной схемой, представленной на фигуре.
При реализации цели изобретения контрольно-габаритное устройство для контроля габаритности подвижных железнодорожных составов содержит П-образную раму 1, установленную над железнодорожным путем с размещенными на ней сканирующими лазерными дальномерами 2, 3 и 4 со встроенными вычислителями, оптико-электронный датчик 5 начала состава и счета вагонов и четыре телевизионные камеры оптико-электронных датчиков 6, 7, 8 и 9 распознавания и фиксирования номеров вагонов, при этом вычислители сканирующих лазерных дальномеров 2, 3 и 4, а также выходы телевизионных камер оптико-электронных датчиков 6, 7, 8 и 9 распознавания и фиксирования номеров вагонов соединены с системой обработки данных 10, связанной с диспетчерским пультом 11. Кроме того, имеются расположенные на одной из боковых стоек П-образной рамы 1 и поперечине первый 12, второй 13, третий 14, четвертый 15 и пятый 16 лазерные дальномеры, ориентация в пространстве оптических осей которых соответствует линиям, ограничивающим предельные габариты вагонов. Оптико-электронный датчик 5 начала состава и счета вагонов выполнен на основе шестого лазерного дальномера, расположенного на одной из стоек П-образной рамы 1. Оптико-электронные датчики 6, 7, 8 и 9 распознавания и формирования номеров вагонов расположены на стойках П-образной рамы 1 и выполнены на основе четырех телевизионных камер, расположенных попарно по обеим сторонам вагона на уровне рамы и середины высоты стенки вагона. Имеются расположенная на поперечине П-образной рамы 1 пятая телевизионная камера 17, расположенные в створе П-образной рамы 1 динамические весы 18, при этом выходы первого 12, второго 13, третьего 14, четвертого 15 и пятого 16 лазерных дальномеров непосредственно соединены с системой обработки данных 10, а через первый 19, второй 20, третий 21, четвертый 22 и пятый 23 цифровые компараторы соответственно - со входами логического элемента «ИЛИ» 24, выход которого связан с расположенным на диспетчерском пульте светоакустическим сигнализатором 25, лазерный дальномер оптико-электронного датчика начала состава и счета вагонов 5 через шестой цифровой компаратор 26 соединен с системой обработки данных 10 и управляющим входом вычислителя 27 поперечного смещения центра тяжести вагона, входы которого соединены с динамическими весами 18, а выход через седьмой цифровой компаратор 28 - с системой обработки данных 10, выход которой соединен с расположенными на диспетчерском пульте 11 блоками 29 и 30 формирования аварийной и предупредительной информации на экране монитора 31, при этом телевизионные камеры оптико-электронных датчиков 6, 7, 8 и 9 распознавания и формирования номеров вагонов соединены с многоканальным видеовходом системы обработки данных 10.
При реализации изобретения могут быть использованы следующие технические решения. Рама 1 аналогична несущей конструкции, используемой в габаритных воротах, в частности, в комплексе коммерческого осмотра грузов АСКО ПВ производства НПК «АВТОМАТИЗАЦИЯ». В качестве сканирующих лазерных дальномеров 2, 3 и 4 могут быть использованы устройства фирмы «HOKUYO» (Япония), например, сканирующий лазерный дальномер UXM-30LX-EW, обеспечивающий измерение расстояний до 30 м с точностью 1 мм при угле сканирования 190°. Указанный сканирующий лазерный дальномер имеет встроенный вычислитель.
В качестве однолучевых лазерных дальномеров 5, 12, 13, 14, 15, 16 могут быть использованы дальномеры производства НПК «АВТОМАТИЗАЦИЯ» ФКНП.468166.001 или их аналоги иностранного производства.
В качестве телевизионных камер 6, 7, 8, 9 и 17 можно использовать цифровые камеры на основе CMOS-матриц, размещенные в герметичных термостатированных кожухах.
В качестве системы обработки данных 10 можно использовать типовую ПЭВМ с соответствующим программным обеспечением и многоканальным видеовходом, обеспечивающим видеозахват телевизионного сигнала. Монитор 31 - жидкокристаллический монитор, например, типа ВМЦ - 38.3 со встроенным динамиком.
Программное обеспечение ПЭВМ 10 обеспечивает, в частности, выполнение следующих функций:
- прием информации о количестве локомотивов в составе по локальной сети от автоматизированной системы управления сортировочной станции;
- прием, формирование и передача информации о негабаритностях погрузки вагонов;
- протоколирование данных о проходящих составах;
- отображение на экране ПЭВМ оператора выявленных негабаритностей единиц проходящего подвижного состава;
- фиксация начала состава, промежутков между вагонами и негабаритности;
- вывод на экран видеоизображения проходящего состава с телевизионных камер в виде полиэкрана или в полноэкранном режиме в зависимости от выбора оператора;
- запись на жесткий диск сжатого (компрессированного) видеоизображения от пяти телевизионных камер;
- выбор любой телекамеры для полноэкранного просмотра;
- хранение архива видеоизображений в объеме, ограниченном емкостью жесткого диска;
- просмотр видеоархива на экране ПЭВМ оператора в однооконном или полиэкранном режимах;
- воспроизведение записанного видеоряда с заданной скоростью в прямом и обратном направлении;
- покадровый просмотр и режим стоп-кадра;
- подключение к единой автоматизированной системе актово-претензионной работы (ЕАСАПР) железной дороги (для передачи данных о прошедшем составе в сеть ОАО «РЖД» для последующей обработки полученной информации;
- поиск видеоинформации по времени прохождения состава, номеру состава, порядковому номеру вагона;
- вывод на экран контуров поперечного сечения вагонов состава для их детального анализа.
- выделение цветом обнаруженных негабаритностей и отправка изображений с пометками по электронной почте;
- осуществление поиска в видеоархиве по номеру/индексу поезда, диапазону времени и дат, признаку наличия негабаритов;
- автоматическое ведение книги регистрации негабаритностей вагонов в поездах;
- получение из АСУ станции отправления натурного листа контролируемого состава;
- создание цифрового портрета вагона.
Динамические весы 18 типа ВРТ-200. Цифровые компараторы 19, 20, 21, 22, 23, 26 и 28, логический элемент 24, вычислитель 27 поперечного смещения центра тяжести вагона реализуются на микроконтроллерах. Светоакустический сигнализатор 25 представляет собой мигающую красную лампу и звонок, включаемые электромагнитным реле. Блоки формирования аварийной 29 и предупредительной 30 информации на экране монитора 31 реализуются на ПЭВМ при использовании соответствующего программного обеспечения.
Автоматизированное устройство контроля габаритов грузов подвижного состава работает следующим образом.
Оператор, получив информацию о приближении состава к зоне контроля, вводит в систему обработки данных 10 данные о количестве локомотивов в составе и номер состава, либо указанные данные передаются в систему обработки данных 10 по локальной сети со станции отправления автоматически. При входе подвижного состава в зону контроля локомотив пересекает луч лазерного дальномера датчика начала состава и счета вагонов 5, выходной сигнал с которого через шестой цифровой компаратор 26 поступает в систему обработки данных 10, которая автоматически формирует команду о начале выполнения контрольных операций. При входе состава в зону контроля единицы подвижного состава пересекают лучи от сканирующих лазерных дальномеров 2, 3 и 4, при этом одновременно начинается запись видеоинформации с четырех телекамер 6, 7, 8 и 9 считываний инвентарных номеров вагонов (также обеспечивающих наблюдение боковых поверхностей вагонов и их рам) и пятой телекамеры 17 обзора крыш вагонов на жесткий диск ПЭВМ системы обработки данных 10. При этом на мониторе 31 в режиме полиэкрана отображается информация от всех телекамер, либо от выбранных оператором телекамеры. Система обработки данных 10 осуществляет счет вагонов в зоне контроля по перекрытию луча однолучевого лазерного дальномера 5. При этом увеличиваются показания счетчика порядкового номера вагона, формируемые на экране монитора 31 и одновременно идентифицируется тип проверяемого вагона, исходя из последовательности вагонов в поезде, записанной в памяти системы обработки данных 10. Одновременно происходит распознавание и формирование инвентарных номеров вагонов телекамерами 6, 7, 8 и 9, эти номера в системе обработки данных 10 записываются и сравниваются с данными о составе.
При движении состава сканирующие лазерные дальномеры 2, 3 и 4 выполняют сканирование в заданных секторах, определяемых геометрией их размещения и высотой вагона. Встроенные в дальномеры вычислители строят изображения контуров боковых стенок вагона и изображение рельефа крыши вагона, либо изображение рельефа расположенного в полувагоне груза. Изображения рельефов боковых стенок и крыши вагона (груза в полувагоне) в системе обработки данных 10 объединяются в единый контур вагона и формируется изображение поперечного сечения контура вагона (боковых стенок и груза в полувагоне).
Каждое полученное изображение поперечного сечения в системе обработки данных 10 подвергается анализу на нарушение разрешенного габарита погрузки. После этого в автоматическом режиме реального времени в системе обработки данных 10 формируется отчет с указанием опасных сечений, содержащих негабарит (с локализацией его положения в сечении) с их привязкой к порядковому и инвентарному номерам вагона в составе, информация о котором формируется по сигналам с лазерного дальномера счета вагонов 5, и инвентарному номеру вагона, информация о котором формируется телевизионными камерами 6, 7, 8 и 9.
Сигнал начала каждого следующего вагона формируется лазерным дальномером 5, когда его луч попадает в промежуток между вагонами и на выходе дальномера формируется дальность, соответствующая отсутствию отраженного от вагона излучения (бесконечность или дальность до какого-либо определенного местного предмета). При этом на выходе шестого цифрового компаратора 26, который фиксирует факт отклонения дальности от имеющей место при отражении луча дальномера от поверхности вагона, формируется сигнал начала следующего вагона.
Сформированный отчет о выявленном сканирующими лазерными дальномерами 2, 3 и 4 нарушении габарита (аварийная информация), либо о смещении груза, близком к предельному (предупредительная информация) отображается на диспетчерском пульте 11 и экране монитора 31.
Информация о негабаритности сохраняется в памяти системы обработки данных 10 с формированием отметки о выявленной негабаритности. Одновременно информация о поперечном сечении контуров вагонов непрерывно записывается в системе обработки данных с возможностью последующего анализа.
Учитывая, что сканирующие лазерные дальномеры 2, 3 и 4 обеспечивают ступенчатый контроль поверхности подвижного состава, дискретность которого возрастает с увеличением скорости движения состава, существует опасность пропуска негабаритов, линейный размер которых вдоль направления движения состава меньше шага развертки лазерного луча по поверхности движущегося состава. Для повышения надежности выявления негабарита в устройство введены пять однолучевых лазерных дальномеров. При отсутствии перекрытия лучей указанных лазерных дальномеров дальномер 12 выдает дальность, равную ширине П-образной поперечины 1, дальномеры 13 и 16 - дальности, соответствующие высоте их подвеса относительно поверхности земли, дальномеры 14 и 15 - наклонную дальность до поверхности земли. На указанные дальности настроены соответствующие лазерным дальномерам цифровые компараторы 19, 20, 21, 22 и 23. При уменьшении регистрируемых дальномерами 12, 13, 14, 15 и 16 дальностей по отношению к указанным выше, что имеет место при пересечении лазерного луча негабаритом, соответствующий компаратор формирует сигнал, который поступает на логический элемент «ИЛИ» 24, который срабатывает, что приводит к срабатыванию аварийного светоакустического сигнализатора 25. Срабатывание логического элемента «ИЛИ» 25 происходит по сигналу с любого (одного или нескольких) однолучевого лазерного дальномера 12, 13, 14, 15 и 16. Учитывая, что однолучевые лазерные дальномеры 12, 13, 14, 15 и 16 при попадании в их луч негабарита вырабатывают информацию о дальности до него, их лучи лежат в плоскости П-образной рамы 1, а выходы непосредственно связаны с системой обработки данных 10, указанная система определяет место локализации негабарита на поверхности вагона (груза) и отмечает его цветом на изображении соответствующего вагона (груза).
При этом данные по весам на колесах колесных тележек с динамических весов 18 поступают на вычислитель 27, который определяет общий вес вагона и поперечное смещение его центра тяжести. Информация о поперечном смещении центра тяжести вагона поступает на цифровой компаратор 28. В случае превышения допустимого смещения компаратор 28 вырабатывает сигнал, поступающий на вход системы обработки данных 10, которая в зависимости от величины смещения формирует команду на формирование предупредительной или аварийной информации на блоки 29 и 30.
Результаты контроля состава с помощью заявляемой автоматизированной системы обрабатываются оператором. После этого формируется справка об обнаруженных негабаритностях подвижного состава, либо состояниях, могущих привести к аварийному смещению груза в контролируемом составе, которая передается по локальной сети в автоматизированную систему управления железной дороги.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНО-ГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2021 |
|
RU2764816C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| Автоматизированный пост динамического взвешивания железнодорожных составов (АПДВ) | 2023 |
|
RU2828636C1 |
| Автоматизированная система взвешивания подвижного состава (АСВ ПС) | 2022 |
|
RU2793987C1 |
| УСТРОЙСТВО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ И ПОДВИЖНОГО СОСТАВА В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2016 |
|
RU2624365C1 |
| Способ автоматизированного учета вагонов и контейнеров в движущемся железнодорожном составе | 2022 |
|
RU2784230C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
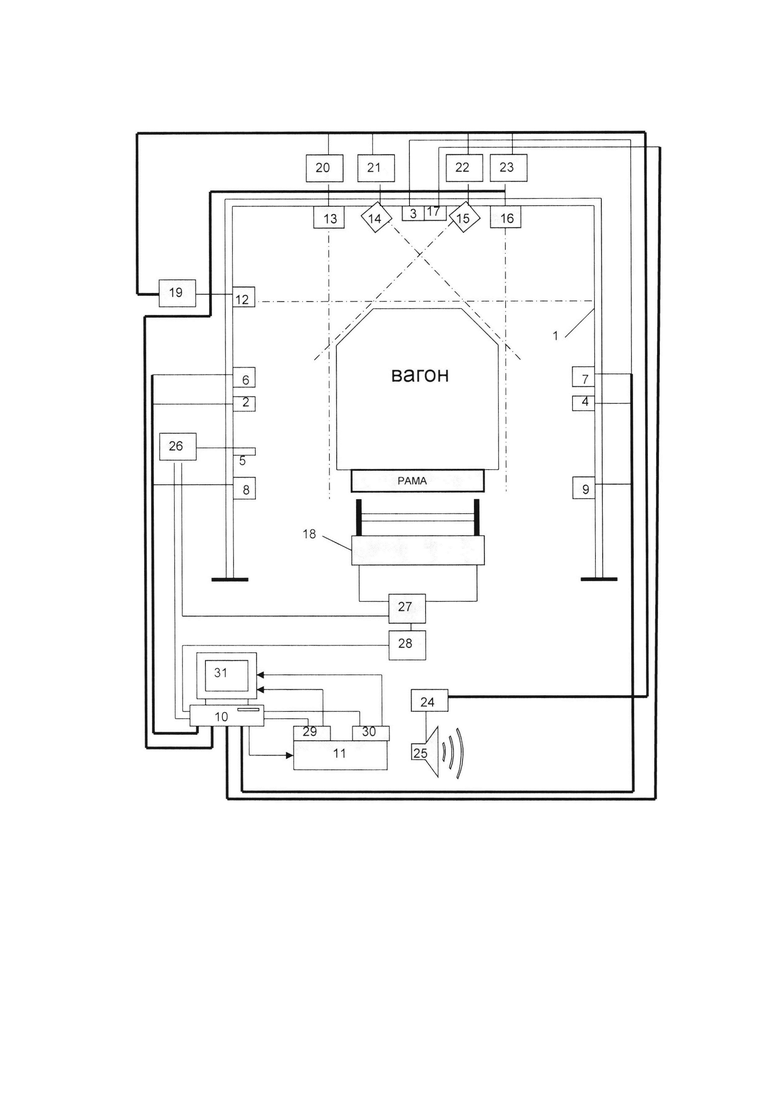
Изобретение относится к средствам контроля габаритов подвижных составов. Устройство включает П-образную раму (1), установленную над железнодорожным путем с размещенными на ней сканирующими лазерными дальномерами (2,3,4) со встроенными вычислителями, оптико-электронный датчик (5) начала состава и счета вагонов, телевизионные камеры оптико-электронных датчиков (6,7,8,9) распознавания и фиксирования номеров вагонов, телевизионную камеру (17) обзора крыш вагонов, лазерные дальномеры (12,13,15,16), ориентация в пространстве оптических осей которых соответствует линиям, ограничивающим предельные габариты вагонов, выходы которых через цифровые компараторы связаны со входами логического элемента «ИЛИ» (24), систему обработки данных (10), диспетчерский пульт (11), статоакустический сигнализатор (25), блоки (29,30) формирования аварийной и предупредительной информации на экране монитора (31), динамические весы (18) с вычислителем (27) поперечного смещения центра тяжести вагона. Достигается повышение надежности обнаружения нарушений габаритов подвижного состава. 1 ил.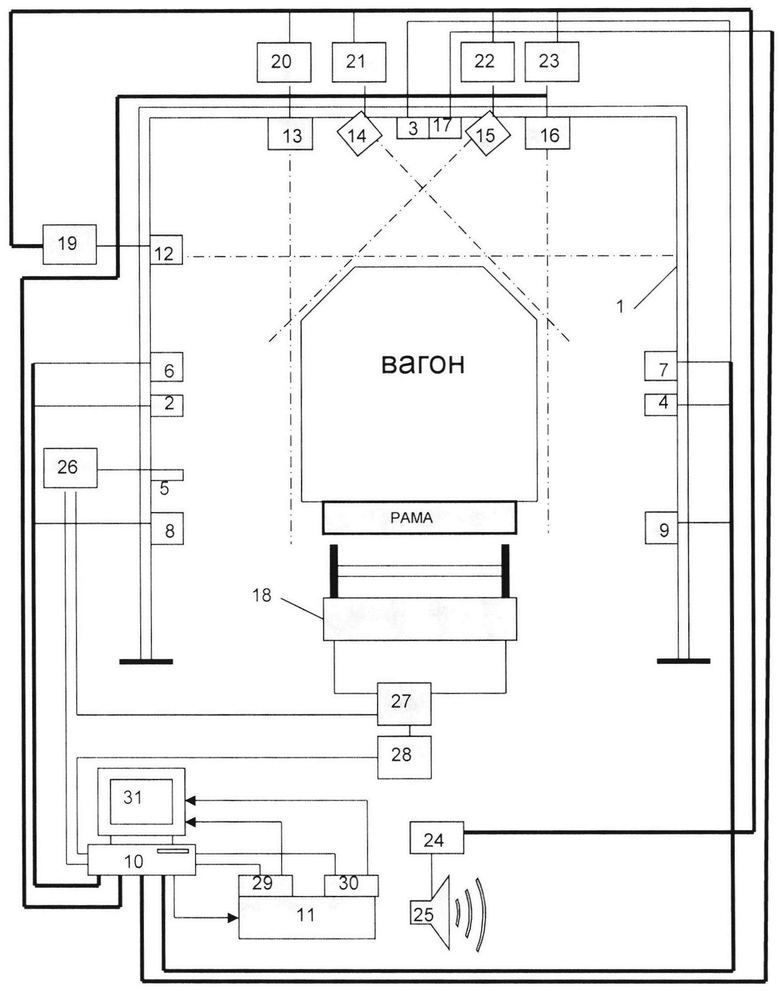
Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов, содержащее П-образную раму, установленную над железнодорожным путем, с размещенными на ней сканирующими лазерными дальномерами со встроенными вычислителями, оптико-электронный датчик начала состава и счета вагонов и оптико-электронные датчики распознавания и фиксирования номеров вагонов, при этом вычислители сканирующих лазерных дальномеров, а также выходы оптико-электронных датчиков распознавания и фиксирования номеров вагонов соединены с системой обработки данных, связанной с диспетчерским пультом, отличающееся тем, что имеются расположенные на одной из боковых стоек рамы и поперечине первый, второй, третий, четвертый и пятый лазерные дальномеры, ориентация в пространстве оптических осей которых соответствует линиям, ограничивающим предельные габариты вагонов, оптико-электронный датчик начала состава и счета вагонов выполнен на основе шестого лазерного дальномера, расположенного на одной из стоек П-образной рамы, оптико-электронные датчики распознавания и формирования номеров вагонов расположены на стойках П-образной рамы и выполнены на основе четырех телевизионных камер, расположенных попарно по обеим сторонам вагона на уровне рамы и середины высоты стенки вагона, имеется расположенная на поперечине П-образной рамы пятая телевизионная камера, расположенные в створе П-образной рамы динамические весы, при этом выходы первого, второго, третьего, четвертого и пятого лазерных дальномеров непосредственно соединены с системой обработки данных, а через первый, второй, третий, четвертый и пятый цифровые компараторы соответственно - со входами логического элемента «ИЛИ», выход которого связан с расположенным на диспетчерском пульте светоакустическим сигнализатором, лазерный дальномер оптико-электронного датчика начала состава и счета вагонов через цифровой компаратор соединен с системой обработки данных и управляющим входом вычислителя поперечного смещения центра тяжести вагона, входы которого соединены с динамическими весами, а выход через цифровой компаратор - с системой обработки данных, выход которой соединен с расположенными на диспетчерском пульте блоками формирования аварийной и предупредительной информации на экране монитора, при этом телевизионные камеры соединены с многоканальным видеовходом системы обработки данных.
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| CN 103723161 A, 16.04.2014. | |||

