Изобретение относится к измерительным средствам контроля и может быть использовано для осмотра и определения габаритных размеров вагонов в составе поезда на железнодорожном транспорте.
Известно устройство для контроля негабаритности грузов на подвижном составе, содержащее вертикальные стойки-опоры с установленными на них поворотными элементами, образующими контур габарита погрузки, в котором поворотные элементы установлены на стойках-опорах независимо друг от друга и снабжены датчиками угла поворота, которые электрически соединены с блоком электронной обработки сигналов и механическими компенсаторами, состоящими из шарнирно закрепленных корпусов, несущих компенсирующие пружины, связанные со штоками, проходящими внутри корпусов и установленными в направляющих, жестко закрепленных на поворотных элементах (SU 432028, кл. B61K 9/02, 1972).
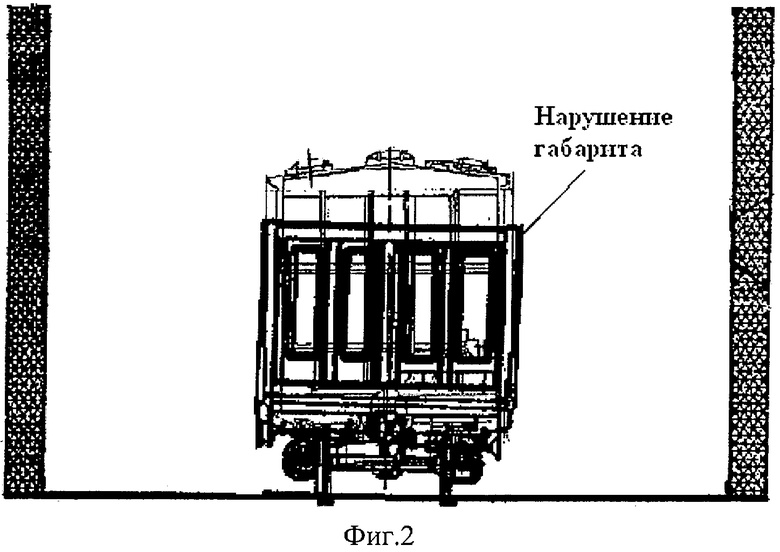
Данное устройство не обеспечивает дистанционный контроль, обладает сложной поворотной конструкцией и ненадежно в работе, кроме того, не выполняет полную регистрацию нарушений границ габарита погрузки.
Из известных способов наиболее близким по технической сущности является способ дистанционного контроля габаритов груза железнодорожных вагонов, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, заключающийся в проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, и сравнении габаритов погрузки с требуемыми габаритами подвижного состава, видеонаблюдении проходящего состава, при этом в каждой контролируемой плоскости устанавливают блок из двух пар оптоэлектронных датчиков "излучатель-приемник", измеряют время перекрытия оптического канала каждой пары "излучатель-приемник", измеряют скорость поезда и вычисляют длину нарушения габарита, устанавливают, по крайней мере, по два приемника излучения в контролируемой плоскости на расстоянии So, а сопряженные с ними излучатели - максимально близко друг от друга, образуя оптические оси, расположенные под углом друг к другу, определяют координаты негабарита, затем по каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране видеомонитора наблюдения, акцентируют внимание оператора на нарушение с указанием места нарушения на телевизионном изображении единицы подвижного состава, полученном от видеокамер наблюдения, подают тревожный сигнал, регистрируют ответную реакцию оператора.
Известно реализующее способ контроля вагонов устройство для контроля негабаритности грузов на подвижном составе железнодорожного транспорта, содержащее габаритные ворота, образованные оптическими границами угла зрения оптоэлектронных датчиков, содержащих излучатели и приемники, имеющих парную оптическую связь, устройство счета вагонов, видеокамеры наблюдения, выходы всех телекамер связаны с соответствующими видеовходами системного блока автоматизированного рабочего места, который выполнен с возможностью вывода на экран компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава с телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры, записи на жесткий диск сжатого видеоизображения с телевизионных камер, воспроизведения видеозаписи и создания видеоархива, кроме этого, оно снабжено устройством измерения скорости проходящего состава, излучатели являются источниками когерентного излучения и установлены на опоре, размещенной над железнодорожным путем, а приемники этого излучения для контроля бокового габарита установлены на опоре, жестко соединенной с рельсами железнодорожного пути, и имеют определенный угол зрения, две пары излучателей и приемников излучения образуют блок, установленный в контролируемой плоскости, причем приемники размещены друг от друга на определенном расстоянии и направлены на излучатели, установленные на расстоянии от линии установки приемников, при этом оптические оси каждой пары "излучатель-приемник" направлены под углом друг к другу, приемники излучения соединены каналами связи с вычислительным устройством и видеомонитором наблюдения, снабженным устройствами акцентирования внимания оператора на нарушение, например, путем визуализации нарушения габарита и подачи тревожного сигнала, а также устройством ответной реакции оператора (RU 2311311, кл. B61K 9/02, 2006).
Недостаток этого устройства заключается в том, что датчики для обзора верхней части вагонов смонтированы на горизонтальной ферме габаритных ворот, что значительно усложняет и удорожает монтаж оборудования. При этом габарит погрузки вагонов не измеряется, а измеряются отдельные его нарушения.
Технический результат изобретения заключается в расширении области дистанционного контроля габаритов погрузки вагонов за счет применения лазерных дальномеров.
В части способа технический результат достигается тем, что в способе дистанционного контроля состояния вагонов в составе поезда, включающем измерение расстояний с помощью лазерных дальномеров одновременно до стенок вагона или груза в двух контролируемых поперечных вертикальных плоскостях на различных высотах от уровня головки рельса, запись полученной информации в память вычислительного устройства, с помощью которого формируют изображения в виде точечных рисунков, сравнение сформированных изображений с предварительно записанным в памяти вычислительного устройства изображением предельно допустимого габарита погрузки, при превышении которого формируют тревожный звуковой сигнал, при этом каждую боковую поверхность вагона разделяют на зоны, в пределах которых осуществляют измерение расстояний до боковой поверхности, первая зона представляет собой область ходовой части вагона от головки рельса до его пола, вторая зона - область от пола вагона до его крыши или до максимальной высоты боковой вертикальной стенки, третья зона представляет собой область крыши вагона от максимальной габаритной высоты боковой стенки до максимальной высоты его загрузки.
В части устройства технический результат достигается тем, что в устройстве для контроля габаритов погрузки вагонов, содержащем габаритные ворота с оптическими блоками, соединенными каналами связи с вычислительным устройством, к которому подключен монитор, блок обработки изображений и блок сравнения границ габаритов погрузки, габаритные ворота выполнены из двух разнесенных в продольном направлении вертикальных стоек, на которых с каждой боковой стороны смонтированы распределенные по высоте в трех зонах контроля габарита погрузки, по крайней мере, три оптических блока, выполненных в виде матрицы лазерных дальномеров, выход вычислительного устройства соединен с входом блока обработки изображений, выход которого подключен к первому входу блока сравнения габаритов погрузки, ко второму входу которого подключен выход блока памяти вычислительного устройства, в котором предварительно записано изображение предельно допустимого габарита погрузки, а выход блока сравнения соединен с вторым входом монитора.
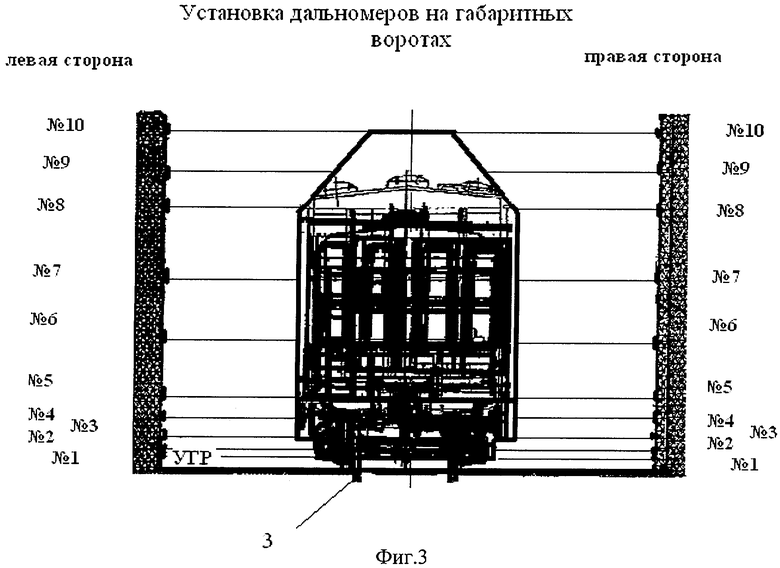
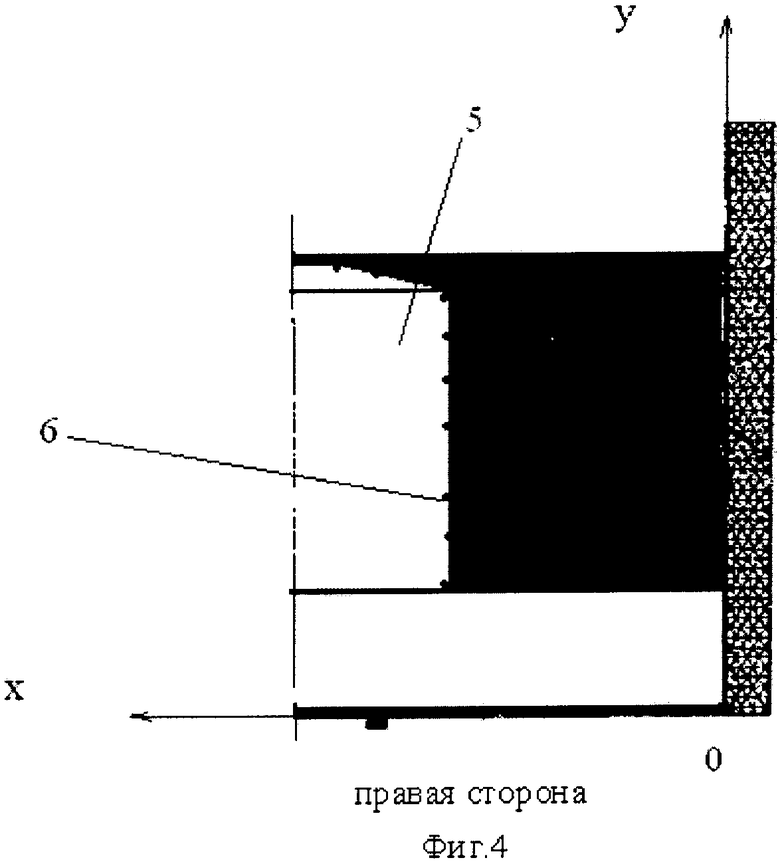
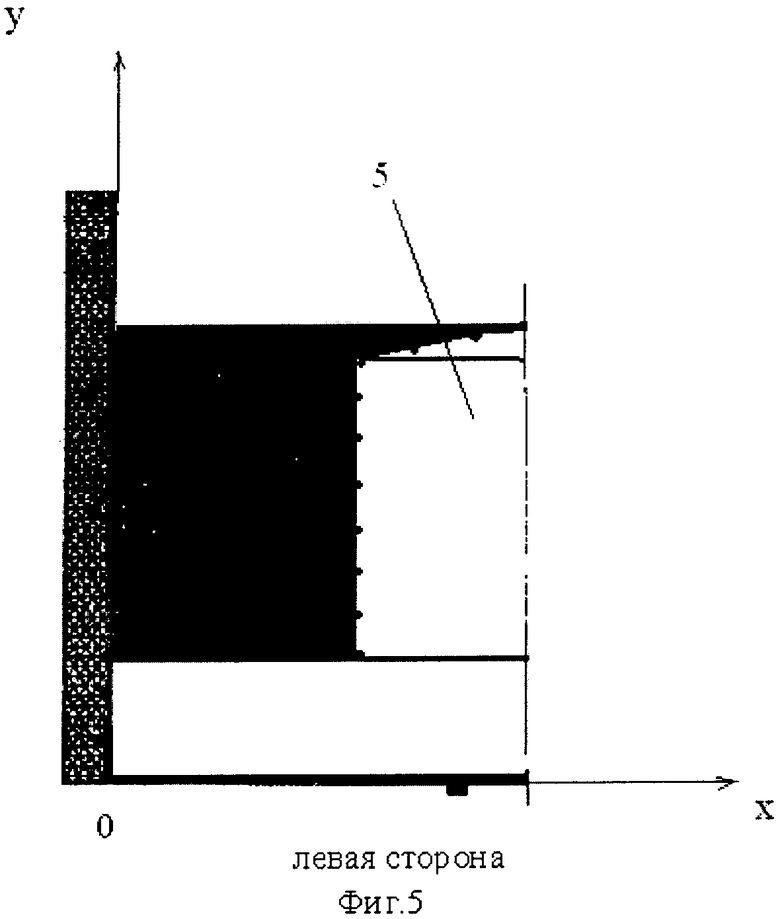
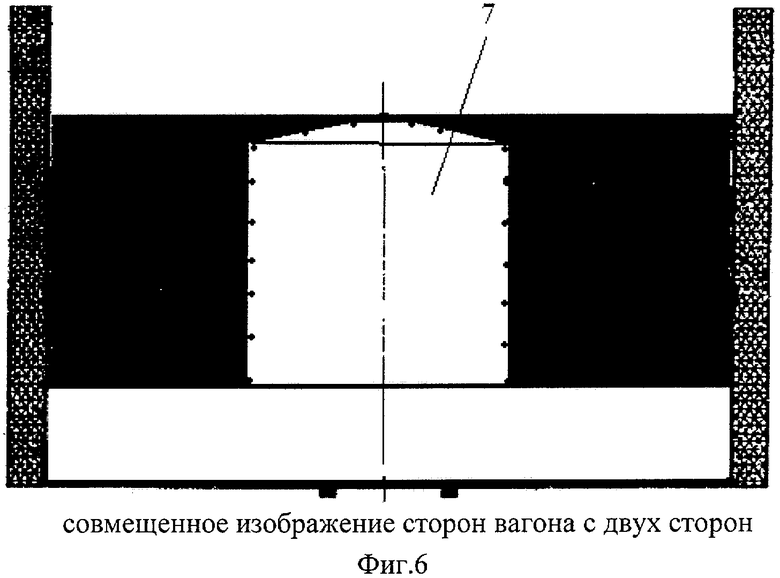
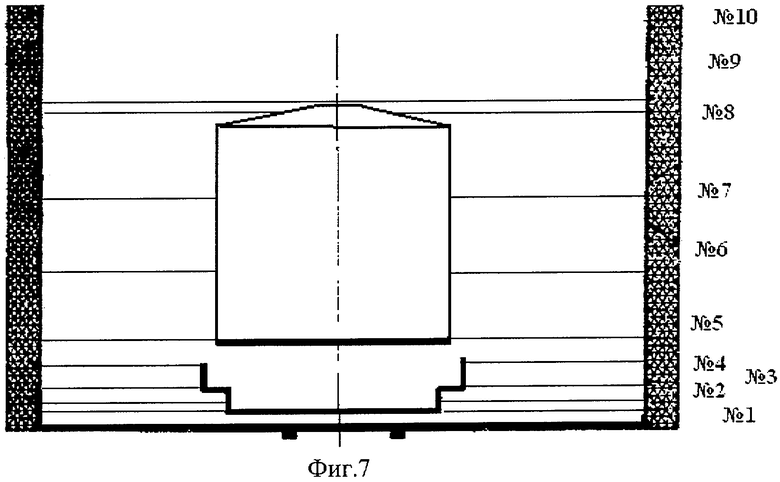
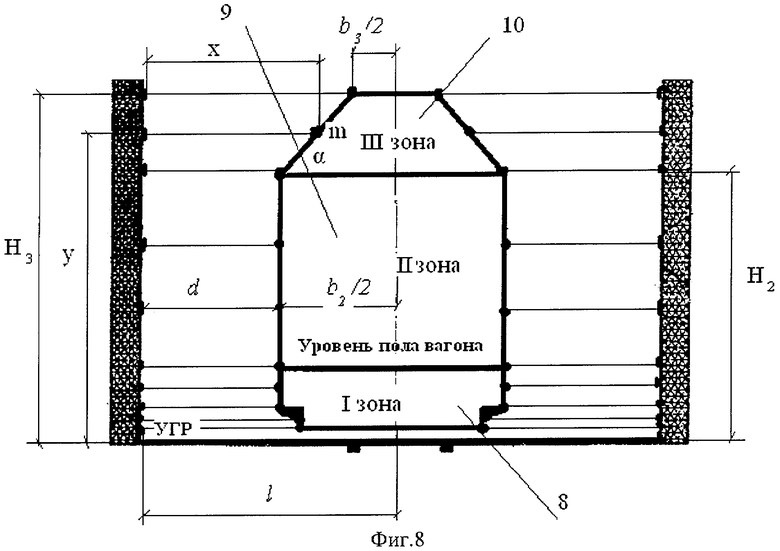
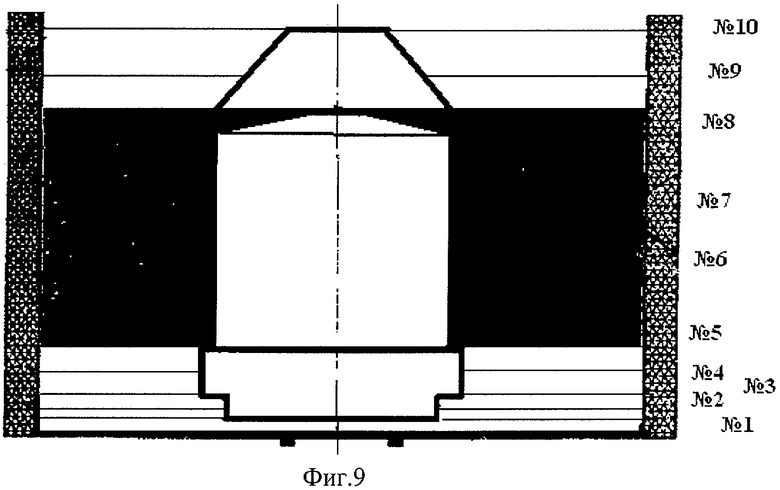
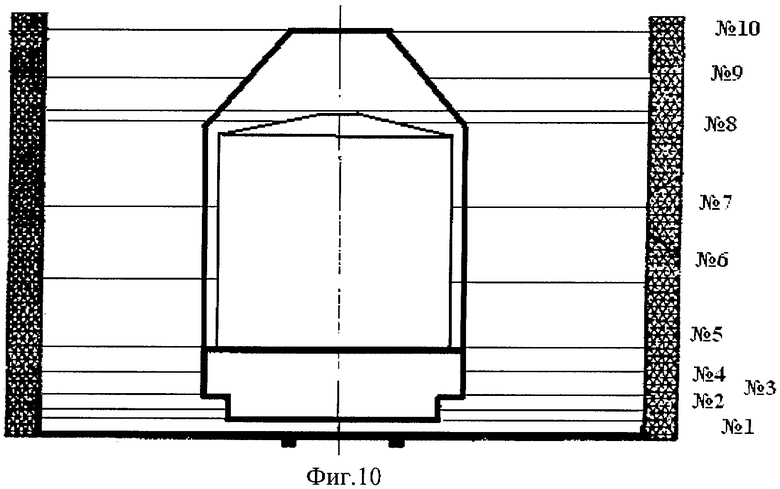
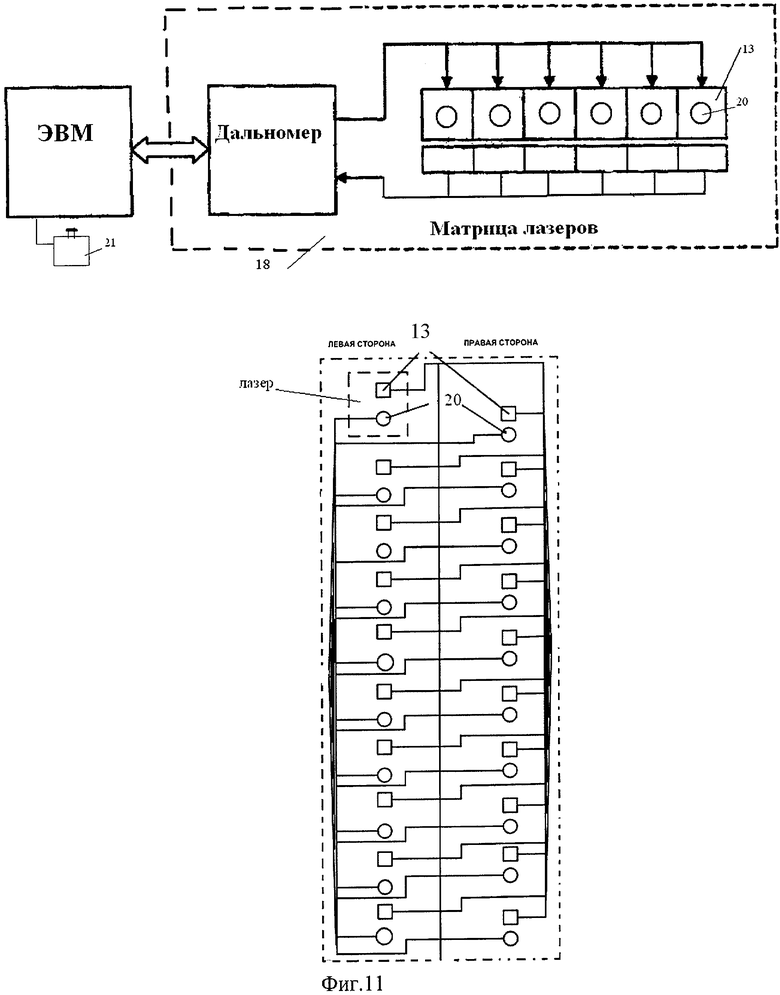
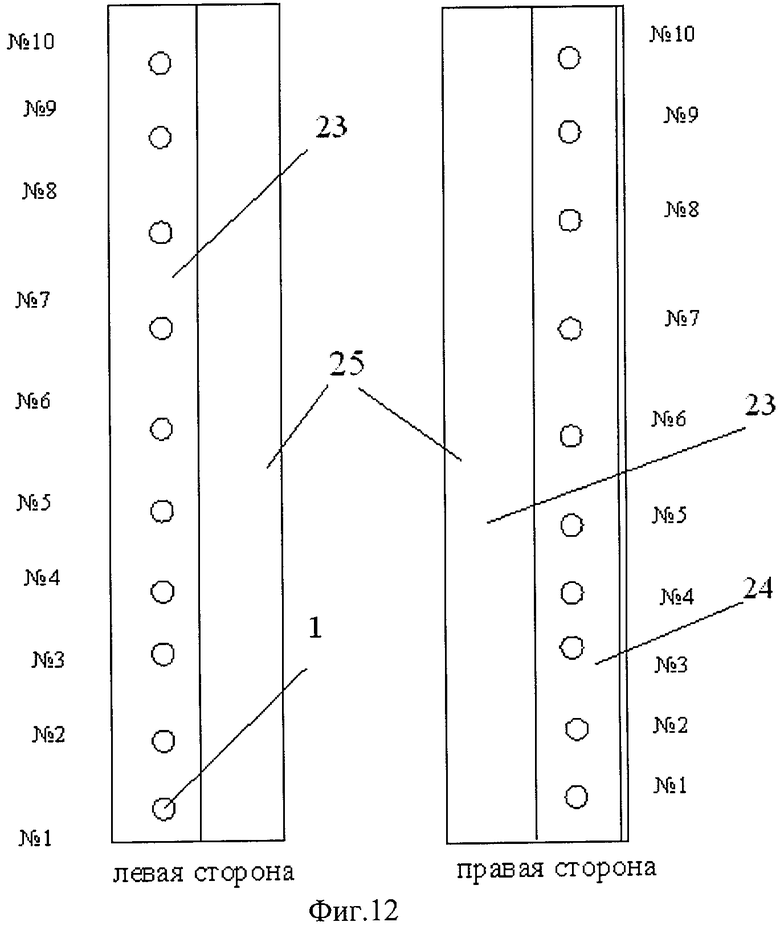
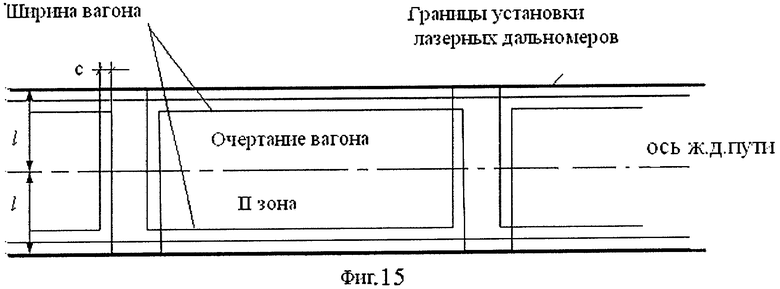
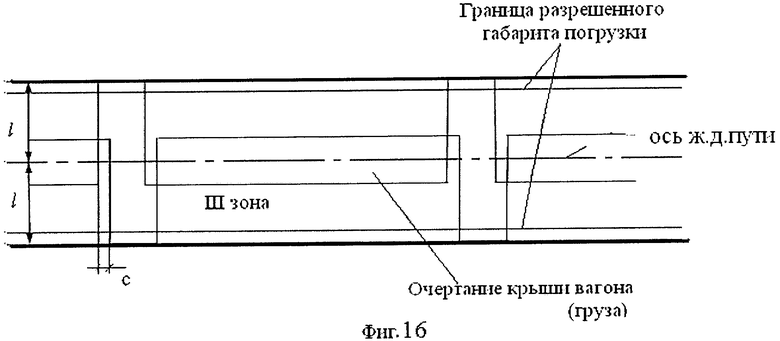
Сущность предлагаемого изобретения поясняется чертежами, где на фиг.1 показана схема установки устройства и его управления; на фиг.2 - негабаритный вагон; на фиг.3 - поперечное сечение вагонов и габарит погрузки; на фиг.4 - изображение правой стороны вагона в виде точечного рисунка; на фиг.5 - изображение левой стороны; на фиг.6 - совмещенное изображение груженого вагона без ходовой части; на фиг.7 - сечение вагона и нижний габарит погрузки; на фиг.8 - расчетная схема; на фиг.9 - определение размеров поперечного сечения вагона дальномерами (черный цвет); на фиг.10 - наложение на поперечное сечение вагона очертания границ погрузки; на фиг.11 - матрица лазеров; на фиг.12 - расположение лазеров на вертикальных стойках (установка по 10 излучателей лазеров принята в качестве примера); на фиг.13 - вид сверху на стойку и на фиг.14-16 - на виде сверху показаны различные границы вагона в зонах контроля.
Способ дистанционного контроля состояния вагонов в составе поезда включает измерение расстояний с помощью лазерных дальномеров 1 одновременно до стенок вагона 2 или груза в двух контролируемых поперечных вертикальных плоскостях на различных высотах от уровня головки рельса 3. Производят запись полученной информации в память вычислительного устройства 4, с помощью которого формируют изображения 5 в виде точечных рисунков 6. Сформированные изображения 7 сравнивают с предварительно записанным в память вычислительного устройства 4 изображением предельно допустимого габарита погрузки. При превышении границ габарита формируют тревожный звуковой сигнал. При этом отраженные оптические сигналы дальномеров 1 записывают в вычислительное устройство 4 от каждой боковой стороны вагона 2 в трех зонах контроля габарита погрузки 8-10. Первая зона 8 представляет собой область ходовой части вагона 2 от головки рельса 3 до его пола. Вторая зона 9 представляет собой область от пола вагона 2 до его крыши или до максимальной высоты боковой вертикальной стенки. Третья зона 10 представляет собой область крыши вагона 2 от максимальной габаритной высоты боковой стенки до максимальной высоты его загрузки.
Устройство для контроля габаритов погрузки вагонов содержит габаритные ворота 11 с оптическими блоками 12, приемники излучения 13 которых соединены каналами связи с вычислительным устройством 4, к которому подключен монитор 14, блок 15 обработки изображений и блок 16 сравнения границ габаритов погрузки. Габаритные ворота 11 выполнены из двух разнесенных в продольном направлении вертикальных стоек 17, на которых с каждой боковой стороны смонтированы распределенные по высоте в трех зонах контроля габарита погрузки 8-10, по крайней мере, три оптических блока 12. Блоки 12 выполнены в виде матрицы 18 лазерных дальномеров 1, выходы которых с помощью каналов связи подключены соответственно к входам вычислительного устройства 4. К выходу вычислительного устройства 4 подключен вход блока 15 обработки изображений, выход которого подключен к первому входу блока 16 сравнения габаритов погрузки. Ко второму входу блока 16 подключен выход блока 19 памяти вычислительного устройства 4, в котором предварительно записано изображение предельно допустимого габарита погрузки. Выход блока 16 подключен к монитору 14.
Излучатели 20 и приемники излучения 13 каждого дальномера 1 установлены строго в горизонтальной плоскости.
Монитор 14 содержит встроенный динамик подачи тревожного звукового сигнала в виде звонка 21. ЭВМ подключена к серверу АСУ станции.
На боковых сторонах вертикальных стоек 17, обращенных к вагону 2, смонтированы панели 22, разделенные на две вертикальные полосы 23 и 24. На одной полосе 23 панели 22 смонтированы матрицы 18 лазерных дальномеров 1, а на другой аналогичной полосе 24 - соответствующие им экраны 25. На второй полосе 24 другой панели 22 смонтированы другие матрицы 18, которым соответствует противоположное расположение экранов 25 на первой полосе 23.
Устройство работает следующим образом.
Состав вагонов проходит через габаритные ворота 11 с оптическими блоками 12. Приемники излучений блоков 12 соединены каналами связи с вычислительным устройством 4 и с подключенным к нему монитором 14. Блок 15 обработки изображений преобразует оптические сигналы в виде точечных рисунков 6 в изображение 5 поперечного сечения каждой стороны груженого вагона 2. В блоке 16 сравнения границ габаритов погрузки происходит совмещение окончательного изображения 7 поперечного сечения вагона 2 с изображением на фиг.11.
Дистанционный контроль вагонов в составе поезда, включающий контроль очертаний габаритов погрузки при входе состава вагонов 2 в зоны контроля 8-10 осуществляется путем сравнения полученных изображений 7 габаритных размеров погрузки с разрешенным габаритом погрузки, а также определения выхода габаритных размеров вагона 2 или загруженных в него грузов. По каналам связи информация по габаритным размерам и о их нарушении передается на автоматизированное рабочее место приемщика поездов, визуализируется на экране монитора 14 наблюдения, на котором установлен разрешенный габарит погрузки. Выход габаритных размеров вагона 2 или загруженных в него грузов контролируется при измерении расстояний до его стенок или груза в двух контролируемых поперечных вертикальных плоскостях по отдельным координатам при отражении оптических сигналов дальномеров 1 в нескольких горизонтальных плоскостях. В первой зоне 8, соответствующей ходовой части вагона, расстояние от датчика до вагона 2 с грузом должно превышать разность расстояния между установкой дальномера от оси железнодорожного пути и половиной габаритной ширины его ходовой части. Во второй зоне 9, соответствующей боковой вертикальной стенке вагона 2, это расстояние должно превышать разность расстояния между указанной установкой дальномера 1 от оси железнодорожного пути и половиной габаритной ширины боковой загрузки или ширины его боковой стенки. В третьей зоне 10 на высоте от максимальной габаритной высоты боковой стенки вагона 2 до максимальной высоты его боковой загрузки указанное расстояние должно превышать разность расстояния между установкой дальномера 1 от оси железнодорожного пути и половиной габаритной ширины на конкретной высоте погрузки. Причем информацию о координатах расстояний до стенки вагона 2 или груза получают сначала с одной боковой стороны вагона 2, затем с его другой боковой стороны. После этого с помощью программы и пересчетной схемы определяются конечные точки этих расстояний, строятся изображения 5 из точечных рисунков 6 правой и левой стороны контура вагона 2. Затем формируют полученные рисунки в один совмещенный относительно оси железнодорожного пути рисунок г груженого вагона. При этом соединяются указанные точки линиями для получения границ габарита погрузки контролируемого вагона 2. Контроль заключается в их сравнении с разрешенными габаритными размерами погрузки.
При контроле состав вагонов 2 на железнодорожной станции проходит с ограничением скорости через габаритные ворота 11 и просвечивается с двух боковых сторон оптическими блоками 12. В качестве этих блоков используются лазерные дальномеры 1, измеряющие расстояния до элементов вагона 2 или груза и размещенные на различных высотах на вертикальных стойках 17. Могут быть использованы лазерные дальномеры моделей Condtrol, Leica DICTO, Bosch, Fluke, Infiniter и другие. Так, например, дальномер Bosch Dile 70 Proffessional имеет диапазон измерений от 0,05 до 70 м и точность ±1,5 мм.
В зоне 8 ими отслеживаются расстояния до ходовых частей вагона 2. В зоне 9 выявляются граничные точки бокового очертания поперечного контура вагона 2. Если вагон 2 открытый, например платформа, то и ширина погруженного груза. В зоне 10 контролируются размеры крыши вагона 2 или шапки груза, т.е. высоты и ширины его погрузки. С каждой боковой стороны матрицы 18 дальномеров 1 каналами связи подключены соответственно к входам вычислительного устройства 4, где формируются с помощью блока 15 обработки изображений точечные рисунки 6 и изображения 5 и 7. Дальнейшая обработка изображений 7 происходит в блоке 16, к которому подключен выход блока 19 памяти вычислительного устройства 4.
Таким образом, сначала по полученным дальномерами 1 расстояниям d определяются конечные точки оптических лучей от места установки каждого излучателя 20 до расположенных под ними приемников 13. По этим расстояниям выстраиваются рисунки 6 габарита погрузки каждого вагона 2. Точки на точечных рисунках 6 зафиксированы по соответствующим высотам относительно уровня головки рельса 3 УГР и оси железнодорожного пути. На панелях 22 из двух вертикальных полос 23 и 24 излучатели 20 лазеров располагаются напротив своих экранов 25. Приемник излучения 13 может размещаться на панели 22 на одной горизонтальной оси своего излучателя 20.
После этого по программе вычислений d строятся точечные изображения 5 сечения контролируемого вагона m1…m10 в системе координат x0y с двух сторон. Рассматривается вариант размещения по десять дальномеров 1 с каждой боковой стороны. Начало координат расположено на пересечении УГР 3 и вертикальной линии, соединяющей выходы излучателей 20 лазеров. Сначала по правой стороне вагона 2 (фиг.4), затем по его левой стороне (фиг.5). Количество точек m ограничивается количеством размещенных на вертикальных стойках 17 лазеров в матрице 18. Если по высоте, равной H=5,3 м, их надо разместить через 5 см, то только с одной стороны их получится 106 штук. В данном случае все точки с каждой стороны вагона 2 на рисунке соединяются между собой линиями, начиная от УГР до его максимальной высоты. Последняя линия ограничивается данной высотой расположения и попаданием оптического луча самого высокого дальномера 1 на груженый вагон 2, а промежутки между ними сразу видны, когда луч не встречает препятствий и доходит до экрана 25, т.е. тогда d=2l. На экране монитора 14 получаются правая и левая половины контура поперечного сечения вагона 2. Площадь рисунка на фиг.4-5 с линиями d закрашена черным цветом. Видимое различие контуров нижней части вагона 2 на фиг.7-8 ликвидируется дополнительной установкой лазеров между их позициями №2 и №3.
После этого в вычислительном устройстве 4 с помощью программы соединяют эти изображения относительно оси железнодорожного пути в одно изображение 7 на мониторе 14 - дисплее ЭВМ (фиг.6) и в результате получают реальное поперечное сечение вагона 2.
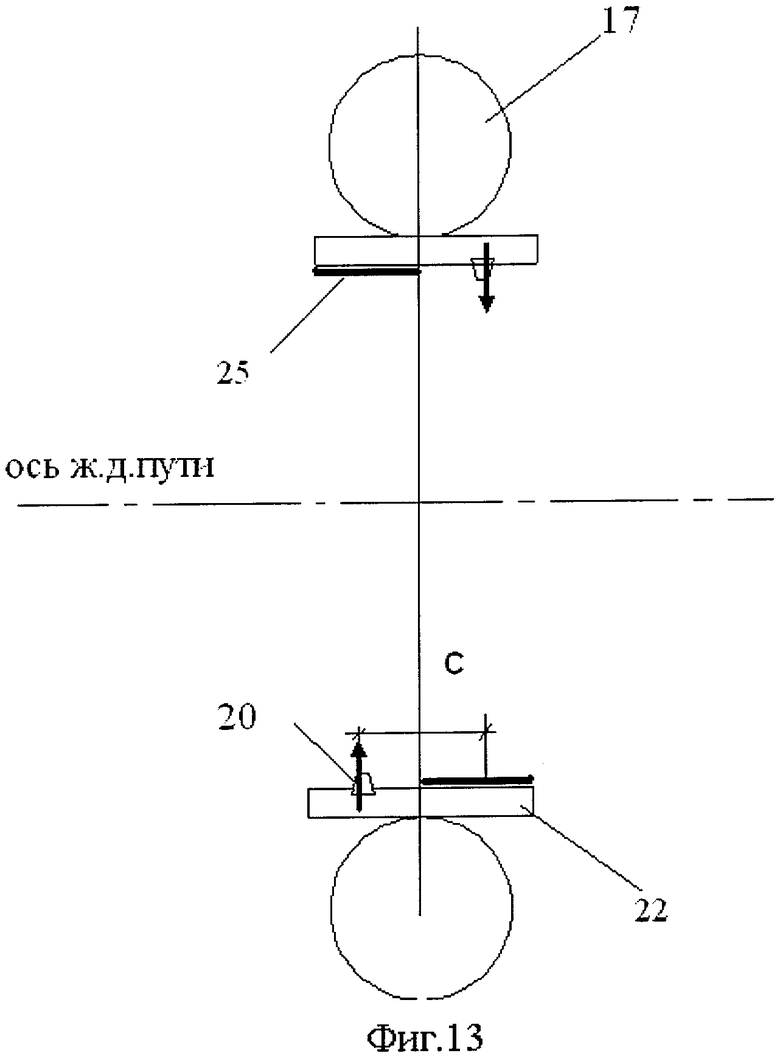
Расстояние вдоль оси железнодорожного пути между матрицами 18 смещено на расстояние «с» и выполнено для того, чтобы лучи от лазеров с одной стороны при отсутствии перед ними вагона с грузом попадали на экраны 25 на другой стороне железнодорожного пути. Излучатели 20 и приемники излучения 13 горизонтально установлены на панелях 22 и подключены соответственно к блоку накачки (питания) и к вычислительному устройству 4. В ЭВМ производится обработка получаемой информации от всех дальномеров 1 и представление изображений в очертание границ габарита погрузки.
Кроме этого, на автоматическом рабочем месте АРМ приемщика поездов имеется блок 16 сравнения изображений для анализа отдельно полученного изображения поперечного сечения вагона 2 на предмет нарушения очертания контура или границ разрешенного габарита погрузки. Этот габарит размещается в блоке 19 памяти вычислительного устройства 4 в качестве нормативно-справочной информации. В случае визуального выявления нарушений на мониторе 14 приемщиком подается звуковой сигнал при нажатии звонка 21. Устройство позволяет автоматически выявлять данные нарушения и осуществлять работу звонка 21 и контролировать через сервер АСУ станции.
Следует отметить, что построенные сечения левой и правой стороны вагона 2 незначительно разнесены вдоль оси железнодорожного пути. Смещение на некоторое расстояние «c» равно габаритной ширине лазера или толщине его луча. Это сделано для того, чтобы изображение не расплывалось при прохождении лазерными лучами разрывов между кузовами вагонов 2 или над ними в составе поезда.
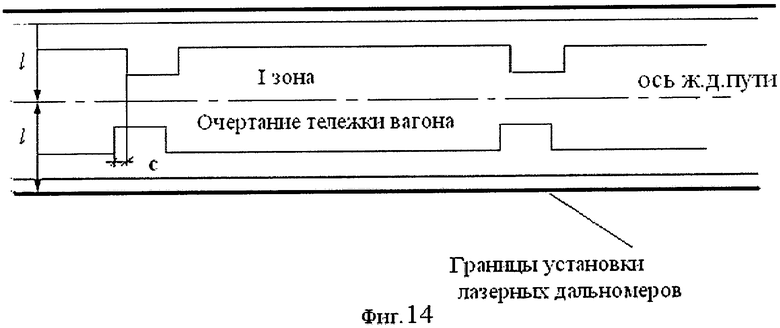
Линейные габаритные размеры вагона 2 можно рассмотреть на виде сверху фиг.14 (зона 8). Такое же изменение точечных рисунков 6 в зонах 9 и 10 показано на фиг.15 и 16. По этим изображениям можно определить линейные размеры вагона или погруженного груза с погрешностью «c».
Координаты произвольной точки на боковой поверхности груженого вагона 2 будут m (x0y). Дальность расстояния от лазера до поверхностей вагона или груза будет составлять dx(фиг.8).
Для безопасности движения на железнодорожном транспорте должно выполняться условие:
где l - расстояние от оси железнодорожного пути до начала отсчета оптического лазера, т.е. до среза отверстия его излучателя, м;
bx - половина габаритной ширины вагона, м.
В верхней зоне 10 угол α наклона границы габарита погрузки определяется по формуле:
где  - половина габаритной ширины вагона в зоне 9;
- половина габаритной ширины вагона в зоне 9;
 - половина габаритной ширины вагона в зоне 10;
- половина габаритной ширины вагона в зоне 10;
H2 - максимальная высота расположения лазеров в зоне 9;
H3 - максимальная высота расположения лазеров в зоне 10.
α=(1625-620)/(5300-4000)=52°
В этом случае половину габаритной ширины вагона 2 можно определить по формуле:
где y - высота расположения контролируемой точки на габарите погрузки.
Таким образом, данный способ позволяет расширить область применения за счет перекрытия лучами закрытых зон контроля у вагонов. Основное отличие в работе заключается в отражении оптического луча от поверхностей осматриваемого вагона или груза.
Эффективность работы устройства состоит в том, что фактический габарит погрузки вагонов более точно измеряется лазерными дальномерами и сравнивается с разрешенным габаритом погрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИРИНЫ КОЛЕИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442714C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Система технического и коммерческого контроля состояния поездов | 2019 |
|
RU2728202C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
Изобретения относится к измерительным средствам контроля и может быть использовано для осмотра и определения габаритных размеров вагонов в составе поезда на железнодорожном транспорте. Способ включает измерение расстояний с помощью лазерных дальномеров одновременно до стенок вагона или груза в двух контролируемых поперечных вертикальных плоскостях на различных высотах от уровня головки рельса, запись полученной информации в память вычислительного устройства, формирование изображения в виде точечных рисунков, сравнение сформированных изображений с предварительно записанным в памяти вычислительного устройства изображением предельно допустимого габарита погрузки, при превышении которого формируют тревожный звуковой сигнал. Устройство содержит габаритные ворота с оптическими блоками, соединенными каналами связи с вычислительным устройством, к которому подключен монитор, блок обработки изображений и блок сравнения границ габаритов погрузки. Выход вычислительного устройства соединен с входом блока обработки изображений, выход которого подключен к первому входу блока сравнения габаритов погрузки, ко второму входу которого подключен выход блока памяти вычислительного устройства, в котором предварительно записано изображение предельно допустимого габарита погрузки, а выход блока сравнения соединен с вторым входом монитора. Достигается расширение области дистанционного контроля габаритов погрузки вагонов за счет применения лазерных дальномеров. 2 н.п. ф-лы, 16 ил.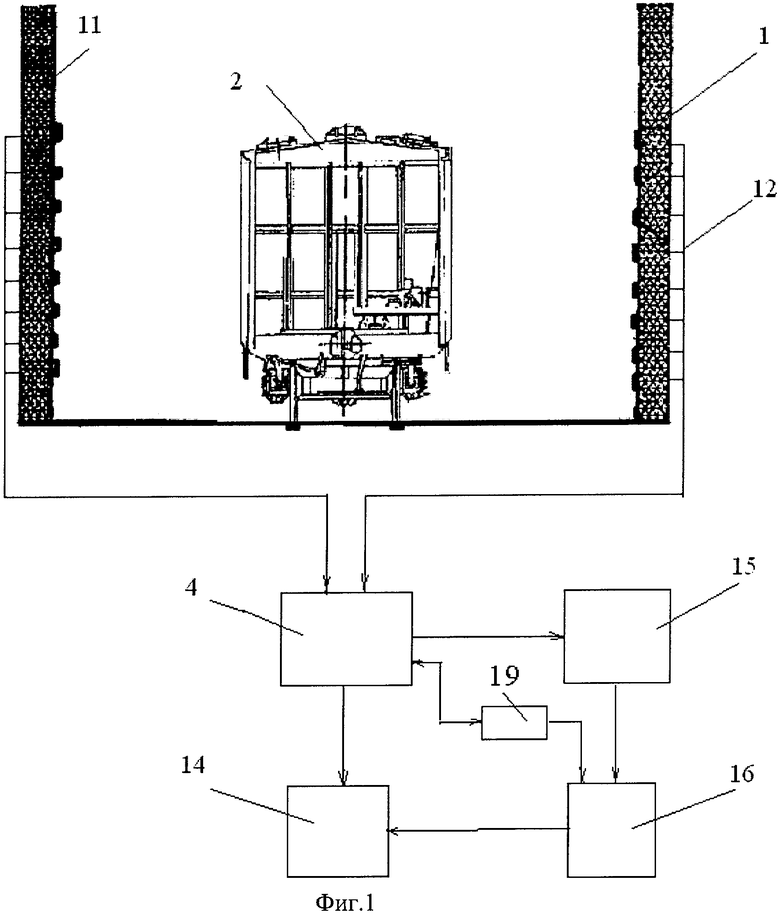
1. Способ дистанционного контроля состояния вагонов в составе поезда, включающий измерение расстояний с помощью лазерных дальномеров одновременно до стенок вагона или груза в двух контролируемых поперечных вертикальных плоскостях на различных высотах от уровня головки рельса, запись полученной информации в память вычислительного устройства, с помощью которого формируют изображения в виде точечных рисунков, сравнение сформированных изображений с предварительно записанным в памяти вычислительного устройства изображением предельно допустимого габарита погрузки, при превышении которого формируют тревожный звуковой сигнал, при этом каждую боковую поверхность вагона разделяют на зоны, в пределах которых осуществляют измерение расстояний до боковой поверхности, первая зона представляет собой область ходовой части вагона от головки рельса до его пола, вторая зона - область от пола вагона до его крыши или до максимальной высоты боковой вертикальной стенки, третья зона представляет собой область крыши вагона от максимальной габаритной высоты боковой стенки до максимальной высоты его загрузки.
2. Устройство для контроля габаритов погрузки вагонов, содержащее габаритные ворота с оптическими блоками, соединенными каналами связи с вычислительным устройством, к которому подключен монитор, блок обработки изображений и блок сравнения границ габаритов погрузки, отличающееся тем, что габаритные ворота выполнены из двух разнесенных в продольном направлении вертикальных стоек, на которых с каждой боковой стороны смонтированы распределенные по высоте в трех зонах контроля габарита погрузки, по крайней мере, три оптических блока, выполненных в виде матрицы лазерных дальномеров, выход вычислительного устройства соединен с входом блока обработки изображений, выход которого подключен к первому входу блока сравнения габаритов погрузки, ко второму входу которого подключен выход блока памяти вычислительного устройства, в котором предварительно записано изображение предельно допустимого габарита погрузки, а выход блока сравнения соединен со вторым входом монитора.
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| Устройство для получения ионизированной воды | 1947 |
|
SU84328A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕГАБАРИТНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2339529C1 |
| Способ изготовления минераловатных изделий | 1988 |
|
SU1544572A1 |

