Группа изобретений относится к области радиолокации и может быть использована в радиолокационных станциях (РЛС) при обнаружении цели.
В современных РЛС широко используются зондирующие сигналы с внутриимпульсной модуляцией и достаточно большой длительности (Справочник по радиолокации./Под ред. М. Сколника, т.3, М., Сов. радио, 1979, с.400, 402). Обнаружение сигнала от цели при этом включает временное сжатие принятого сигнала с помощью согласованного фильтра и последующее сравнение его с порогом обнаружения, при превышении которого принимается решение об обнаружении цели (Теоретические основы радиолокации./ Под ред. Я.Д. Ширмана «Сов. радио», 1970, с.110-114, рис.3.19).
Сигнал после согласованной обработки представляет собой сжатый во времени сигнал (импульс), состоящий из главного лепестка, временное положение которого соответствует по дальности положению цели, и ряда дополнительных откликов - боковых лепестков, соответствующих другим (ложным) значениям дальности.
При большом уровне принимаемого сигнала наличие боковых лепестков может вызвать ложное обнаружение, при этом вместо одной цели обнаруживается несколько, что приводит к возрастанию уровня ложной тревоги.
Известны способ и устройство обнаружения отраженного от цели сигнала, в которых для уменьшения влияния боковых лепестков сжатого сигнала используется весовая обработка принимаемого сигнала, проводимая путем его фильтрации с использованием различных весовых функций, например функций Хэмминга, Тейлора и др. (Справочник по радиолокации./Под ред. М. Сколника, т.3, М., Сов. радио, 1979, с.430).
Наиболее близким способом обнаружения сигнала, отраженного от цели, является способ, включающий весовую обработку отраженного от цели принимаемого электромагнитного колебания с использованием n≥2 весовых функций, измерение отношений уровней сигналов после весовой обработки, сравнение сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, с порогом обнаружения (Патент РФ №2112992).
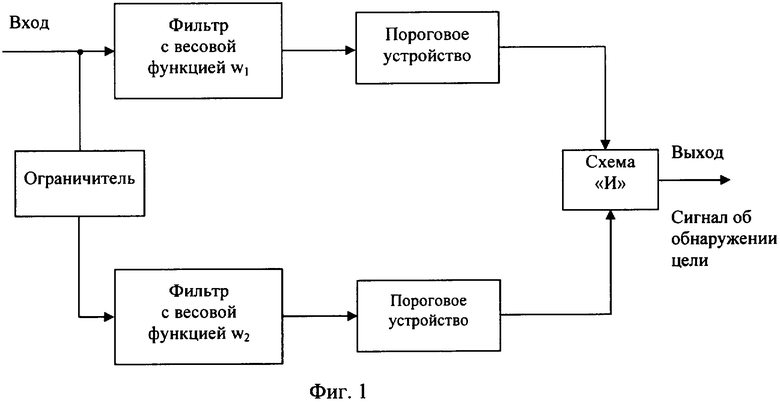
Устройство, наиболее близкое к заявляемому (фиг.1), включает фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, ограничитель, вход которого соединен со входом фильтра с весовой функцией w1, а выход - со входом фильтра с весовой функцией w2, два пороговых устройства, последовательно соединенных с выходами соответствующих фильтров, и схему «И», первый и второй входы которой соединены с выходами соответствующих пороговых устройств, выход схемы «И» является выходом устройства радиолокационного обнаружения цели (Патент РФ №2106653).
Решаемой задачей является расширение арсенала технических средств для уменьшения влияния боковых лепестков сигнала при обнаружении одиночной радиолокационной цели.
Техническим результатом является реализация технического средства для уменьшения влияния боковых лепестков сигнала при обнаружении одиночной радиолокационной цели.
Указанный результат достигается тем, что в способе обнаружения радиолокационного сигнала, отраженного от цели, включающем весовую обработку отраженного от цели принимаемого электромагнитного колебания с использованием n≥2 весовых функций, измерение отношений уровней сигналов после весовой обработки, сравнение сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, с порогом обнаружения, согласно изобретению принимают решение об обнаружении одиночной цели, если уровень сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, превышает уровень порога обнаружения и отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других видов весовой обработки, отличаются от расчетных значений этих отношений для области главного лепестка сигнала не более чем на установленную величину.
Указанный результат достигается также тем, что весовую функцию весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, выбирают равномерной.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения цели, содержащем фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w1, и схему «И», выход которой является выходом радиолокационного устройства обнаружения цели, согласно изобретению, вход фильтра с весовой функцией w2 соединен со входом фильтра с весовой функцией w1, введены вычислитель отношения сигналов, устройство сравнения и устройство задержки, при этом первый и второй входы вычислителя отношения сигналов соединены с выходами фильтров с соответствующими весовыми функциями w1, w2, а выход его соединен со входом устройства сравнения, вход устройства задержки соединен с выходом порогового устройства, первый и второй входы схемы «И» соединены соответственно с выходом устройства задержки и выходом устройства сравнения.
Указанный результат достигается также тем, что весовая функция w1 является равномерной.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения цели, содержащем фильтр с весовой функцией w1, вход которого является входом радиолокационного устройства обнаружения цели, фильтр с весовой функцией w2, пороговое устройство, последовательно соединенное с выходом фильтра с весовой функцией w1, и схему «И», выход которой является выходом радиолокационного устройства обнаружения цели, согласно изобретению, введены n фильтров с весовыми функциями w3,..., wn+2 соответственно, n+1 вычислителей отношения сигналов, n+1 устройств сравнения, вторая схема «И», устройство задержки, при этом входы фильтров с весовыми функциями w2,..., wn+2 соединены со входом фильтра с весовой функцией w1, первые входы вычислителей отношения сигналов соединены с выходами фильтра с весовой функцией w1, а вторые их входы соединены с выходами фильтров с весовыми функциями w2,..., wn+2 соответственно, выходы вычислителей отношения сигналов соединены со входами соответствующих устройств сравнения, выходы которых соединены с n+1 входами второй схемы «И», вход устройства задержки соединен с выходом порогового устройства, первый и второй входы схемы «И» соединены с выходом устройства задержки и выходом второй схемы «И» соответственно.
Указанный результат достигается также тем, что весовая функция w1 является равномерной.
Поясним сущность изобретения.
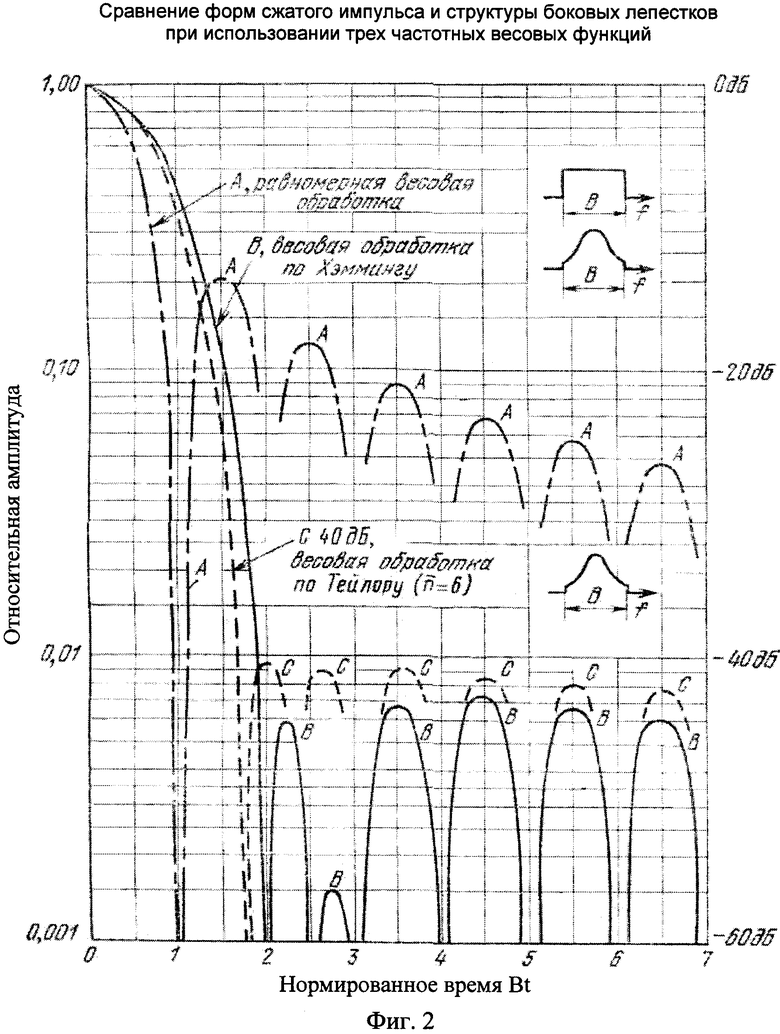
На фиг.2 проведено сравнение форм сжатого импульса и структуры его боковых лепестков, получаемых при использовании трех весовых функций (Справочник по радиолокации./Под ред. М. Сколника, т.3, М., Сов. радио, 1979, с.433, рис.25): равномерной весовой функции (кривая А), весовой обработки по Хэммингу (кривая В) и весовой обработки по Тейлору (кривая С).
Из графиков следует, что при использовании равномерной весовой обработки сигнала (обработки, обеспечивающей заведомо наибольший уровень сигнала) длительность главного лепестка по нулевому уровню наименьшая и составляет величину Bt (где В - ширина спектра, t - нормированное время), а уровень первого бокового лепестка примерно на 13.4 дБ ниже уровня главного лепестка. При весовой обработке по Тейлору и по Хэммингу главный лепесток расширяется соответственно в 1.8 и 2 раза, а первый боковой лепесток равен соответственно -40.6 дБ и -43.4 дБ.
В заявляемых технических решениях в качестве признака одиночной цели используется примерное равенство отношений уровней сигнала в области главного лепестка сжатого сигнала после различных видов обработки. Решение об обнаружении одиночной цели принимают, если уровень сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, превышает порог, а отношения уровней сигналов после различных видов обработки отличаются от их расчетных значений для области главного лепестка сигнала не более чем на установленную величину (Δу).
Величина отличия между измеренными и расчетными значениями отношений уровней сигнала для каких-либо двух видов весовой обработки (например, равномерной и по Хэммингу или равномерной и по Тейлору) при этом определяется величиной отличия отношений уровней соответственно измеренных (δизм) и расчетных (δрас) значений для области главного лепестка сигнала, т.е.
где δизм - измеренное отношение уровней сигнала при равномерной весовой обработке и весовой обработке по Хэммингу или при равномерной весовой обработке и весовой обработке по Тейлору;
δрас - расчетное отношение уровней сигнала для области главного лепестка при равномерной весовой обработке и весовой обработке по Хэммингу или при равномерной весовой обработке и весовой обработке по Тейлору.
Допустимые отличия измеренных отношений от расчетных значений могут быть выбраны, например, в пределах 5% от расчетных значений, т.е. установленная величина Δу может быть взята 0.05.
Заявляемый способ может быть реализован несколькими вариантами устройств.
В п.3 формулы заявлено наиболее простое устройство обнаружения одиночной радиолокационной цели (фиг.3). Данное устройство исключает возможность обнаружения цели за счет боковых лепестков сигнала, сжатого с весовой обработкой по Хэммингу, и обеспечивает обнаружение сигнала, сжатого с равномерной весовой обработкой (обработки, обеспечивающей заведомо наибольший уровень сигнала).
Но это устройство обладает следующим недостатком: разрешающая способность по дальности при его использовании будет определяться весовой обработкой по Хэммингу, а не равномерной весовой обработкой.
Последнее объясняется тем, что равенство сигналов после двух весовых обработок обеспечивается при Bt≈0 и Bt≈1.3 (фиг.2), поэтому для исключения обнаружения в точке Bt≈1.3 импульс после равномерной весовой обработки должен быть расширен. Это устройство может быть использовано там, где эти недостатки несущественны.
В п.5 заявлено устройство обнаружения одиночной радиолокационной цели (фиг.5), устраняющее недостаток устройства по п.3.
Таким образом достигается заявляемый технический результат.
Изобретения иллюстрируются следующими чертежами.
Фиг.1 - наиболее близкое устройство обработки радиолокационного сигнала, отраженного от цели.
Фиг.2 - сравнение формы сжатого импульса и структуры боковых лепестков, получаемых при использовании трех частотных весовых функций.
Фиг.3 - заявляемое устройство обнаружения цели с двумя весовыми функциями.
Фиг.4 - заявляемое устройство обнаружения цели с n+2 весовыми функциями.
Устройство обнаружения радиолокационной цели с двумя весовыми функциями по п.3 (фиг.3) содержит фильтр 1 с весовой функцией w1, который является входом радиолокационного устройства обнаружения цели, и фильтр 2 с весовой функцией w2, пороговое устройство 3, схему «И» 4, вычислитель отношения сигналов 5, устройство сравнения 6, устройство задержки 7. При этом вход фильтра 2 соединен со входом фильтра 1, пороговое устройство 3 последовательно соединено с выходом фильтра 1, первый и второй входы вычислителя отношения сигналов 5 соединены с выходами соответствующих фильтров, а выход - со входом устройства сравнения 6, вход устройства задержки 7 соединен с выходом порогового устройства 3, первый и второй входы схемы «И» 4 соединены соответственно с выходом устройства задержки 7 и с выходом устройства сравнения 6. Выход схемы «И» 4 является выходом радиолокационного устройства обнаружения цели.
Весовая функция w1 фильтра 1 в данном устройстве выбрана равномерной, весовая функция w2 фильтра 2 - функция Хэмминга.
Рассмотрим работу этого устройства.
В соответствии с заявляемым способом сигнал об обнаружении цели на выходе устройства должен выдаваться при одновременном выполнении двух условий:
1) уровень сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала (в данном случае после равномерной весовой обработки), превышает порог;
2) отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других видов весовых обработок (в устройстве по п.3 - к уровню сигнала  после обработки с весовой функцией Хэмминга, в устройстве по п.5 - к уровню сигнала после обработки с весовой функцией wi,) отличаются от расчетных значений, полученных для главного лепестка сжатого сигнала, не более чем на установленную величину.
после обработки с весовой функцией Хэмминга, в устройстве по п.5 - к уровню сигнала после обработки с весовой функцией wi,) отличаются от расчетных значений, полученных для главного лепестка сжатого сигнала, не более чем на установленную величину.
Выполнение первого условия проверяется с помощью порогового устройства 3, включенного на выход фильтра 1 с равномерной весовой обработкой. Выполнение второго условия проверяется с помощью вычислителя отношения сигналов 5 и устройства сравнения 6. Одновременность выполнения указанных условий обеспечивается устройством задержки 7 и анализируется с помощью схемы «И» 4.
В момент образования главного лепестка сжатого сигнала на выходе фильтра 1 образуется сигнал, который подается на вход порогового устройства 3 и на первый вход вычислителя отношения сигналов 5. В пороговом устройстве 3 сигнал сравнивается с уровнем порога обнаружения, устанавливаемым исходя из допустимой вероятности ложной тревоги при обнаружении цели. Если уровень порога обнаружения превышен, то на выходе порогового устройства 3 формируется сигнал, который поступает на вход схемы задержки 7 и далее - на первый вход схемы «И» 4.
В этот же момент на выходе фильтра 2 образуется другой сигнал, который поступает на второй вход вычислителя отношения сигналов 5, и с выхода вычислителя отношения сигналов 5 выдается сигнал, пропорциональный отношению измеренных сигналов  . В устройстве сравнения 6 отношение δизм сравнивается с расчетным значением данного отношения δрас, и если абсолютная величина разности указанных величин не превышает допустимого значения Δу (1), то на выходе устройства сравнения 6 выдается сигнал, который подается на второй вход схемы «И» 4. В результате на выходе схемы «И» 4 выдается сигнал об обнаружении цели.
. В устройстве сравнения 6 отношение δизм сравнивается с расчетным значением данного отношения δрас, и если абсолютная величина разности указанных величин не превышает допустимого значения Δу (1), то на выходе устройства сравнения 6 выдается сигнал, который подается на второй вход схемы «И» 4. В результате на выходе схемы «И» 4 выдается сигнал об обнаружении цели.
Когда на выходе фильтров 1 и 2 действует боковой лепесток сжатого сигнала, то на выходе вычислителя отношений 5 выдается величина, значительно отличающаяся от единицы, поскольку уровни боковых лепестков после весовой обработки с равномерной весовой функцией и весовой функцией Хэмминга отличаются на 20-30 дБ. В результате на выходе устройства сравнения 6 сигнал выдан не будет, он будет отсутствовать и на входе схемы «И» 4. Поэтому, если даже уровень бокового лепестка на выходе фильтра 1 превысит уровень порога обнаружения и на выходе порогового устройства 3 и далее - на выходе устройства задержки 7, и на первом входе схемы «И» 4 появится сигнал, то на выходе схемы «И» 4 сигнал обнаружения цели выдан не будет.
Заявляемое устройство может быть выполнено с использованием следующих функциональных элементов.
Фильтр 1, фильтр 2 - цифровые фильтры (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М., Радио и связь, 1986, с.38-45).
Пороговое устройство 3, схема «И» 4, устройство сравнения 6, устройство задержки 7 - цифровые элементы, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник./Под ред. Б.В.Тарабрина, М., Радио и связь, 1984).
Вычислитель отношения сигналов 5 - вычислитель, осуществляющий вычисление отношения сигналов  .
.
Устройство сравнения 6 - вычислитель, осуществляющий проверку условия (1).
Устройство обнаружения радиолокационной цели по п.5 (фиг.4) содержит фильтр 1 с весовой функцией w1, который является входом радиолокационного устройства обнаружения цели, фильтр 2 с весовой функцией w2, пороговое устройство 3, схему «И» 4, n фильтров 5 с весовыми функциями w3,...,wn+2 соответственно, n+1 вычислителей отношения сигналов 6, n+1 устройств сравнения 7, вторую схему «И» 8, устройство задержки 9. При этом входы фильтров с весовыми функциями w2,..., wn+2 соединены со входом фильтра 1 с весовой функцией w1, выход фильтра 1 с весовой функцией w1 соединен с пороговым устройством 3, первые входы n+1 вычислителей отношения сигналов 6 соединены с выходом фильтра 1 с весовой функцией w1, а вторые их входы соединены с выходами n+1 фильтров с весовыми функциями w2,..., wn соответственно, выходы n+1 вычислителей отношения сигналов 6 соединены со входами n+1 соответствующих устройств сравнения 7, выходы которых соединены с n+1 входами второй схемы «И» 8, вход устройства задержки 9 соединен с выходом порогового устройства 3, первый и второй входы схемы «И» 4 соединены с выходом устройства задержки 9 и выходом второй схемы «И» 8 соответственно. Выход схемы «И» 4 является выходом радиолокационного устройства обнаружения цели.
Заявляемое устройство может быть выполнено с использованием следующих функциональных элементов.
Фильтр 1, фильтр 2, фильтры 5 - цифровые фильтры (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М., Радио и связь, 1986, с.38-45).
Пороговое устройство 3, схема «И» 4, устройство сравнения 7, вторая схема «И» 8, устройство задержки 9 - цифровые элементы, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник./Под ред. Б.В.Тарабрина, М., Радио и связь, 1984).
Вычислитель отношения сигналов 6 - вычислитель, осуществляющий вычисление отношения сигналов  .
.
Устройство сравнения 7 - вычислитель, осуществляющий проверку условия (1).
Это устройство работает аналогично устройству по п.3 (фиг.3). Особенность состоит в следующем. Для того чтобы сигнал с выхода порогового устройства 3 (целесообразно в фильтре 1 применять равномерную весовую обработку, что предусмотрено п.5 формулы) прошел на выход схемы «И» 4 и, таким образом, был выдан сигнал об обнаружении цели, нужно, чтобы на выходах всех устройств сравнения 7 появился сигнал. Это возможно только тогда, когда на выходах всех вычислителей отношения сигналов 6 уровни сигналов близки к расчетным (т.е. для всех весовых обработок выполняется условие (1)).
Отметим, что устранение указанной ранее зоны неоднозначности в точке Bt≈1.3, имеющей место в устройстве по п.3 (фиг.3), обеспечивается в устройстве по п.5 уже при n=3. Действительно, если в дополнение к двум фильтрам ввести фильтр с весовой обработкой по Тейлору, то уровень сигнала после этой обработки не будет равен уровню, соответствующему в точке Bt≈1.3 (фиг.2). Для большего отличия уровня сигнала в этой точке можно использовать весовую функцию «косинус квадрат с пьедесталом» «отношение сужения» 3:1 (Справочник по радиолокации./Под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.434, табл.9, строка 45).
Таким образом обеспечивается достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2345382C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2319978C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2112992C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413238C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413237C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО ОБНАРУЖЕНИЯ И ОЦЕНИВАНИЯ ЧИСЛА ИСТОЧНИКОВ ИЗЛУЧЕНИЯ С АДАПТИВНЫМ ВЫРАВНИВАНИЕМ МОЩНОСТЕЙ ШУМОВ В КАНАЛАХ | 2002 |
|
RU2204840C1 |
| Способ пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели бистатической радиолокационной системой | 2020 |
|
RU2739938C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2001 |
|
RU2212683C2 |
| СПОСОБ СОЗДАНИЯ ЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЫШЕННОЙ ЯРКОСТИ И КОНТРАСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483323C1 |

Группа изобретений относится к области радиолокации и может быть использована в радиолокационных станциях (РЛС) при обнаружении цели. Решаемой задачей является расширение арсенала технических средств для уменьшения влияния боковых лепестков сигнала при обнаружении одиночной радиолокационной цели. Достигаемым техническим результатом является реализация технического средства для уменьшения влияния боковых лепестков сигнала при обнаружении одиночной радиолокационной цели. Сущность изобретения заключается в том, что осуществляют весовую обработку принимаемого электромагнитного колебания с использованием n≥2 весовых функций. При этом после каждой весовой обработки в области главного лепестка сигнала измеряют отношения уровня сигнала с заведомо наибольшим уровнем к уровню сигнала после других видов весовой обработки и сравнивают сигнал с заведомо наибольшим уровнем с порогом обнаружения, а указанные отношения - с их расчетными значениями. Принимают решение об обнаружении одиночной цели, если уровень сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, превышает уровень порога обнаружения и отношения уровня сигнала после весовой обработки, обеспечивающей заведомо наибольший уровень сигнала, к уровням сигналов после других типов весовой обработки, отличаются от расчетных значений этих отношений не более чем на установленную величину. 3 н. и 3 з.п. ф-лы, 4 ил.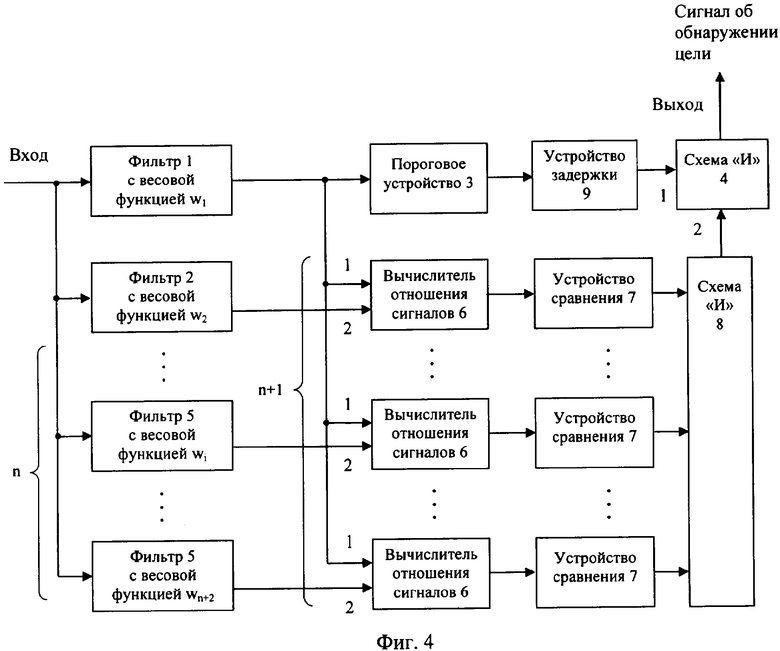
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2112992C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2237263C2 |
| ОРБИТАЛЬНЫЙ ИМПЛАНТАТ ИЗ ПОРИСТОГО ПОЛИТЕТРАФТОРЭТИЛЕНА | 2004 |
|
RU2270641C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2001 |
|
RU2212683C2 |
| СПОСОБ ДЕЗОДОРАЦИИ ПРОДУКТОВ КОНДЕНСАЦИИ ХЛОРИРОВАННЫХ УГЛЕВОДОРОДОВ С ПОЛИСУЛЬФИДАМИ ЩЕЛОЧНЫХ МЕТАЛЛОВ | 1936 |
|
SU52497A1 |
| US 6166678 A, 26.12.2000 | |||
| US 6028548 A, 22.02.2000. | |||

