Изобретение относится к радиолокации и предназначено для обнаружения сигнала, отраженного от воздушной цели, на фоне прямого зондирующего сигнала от радиопередатчика, и сигналов, отраженных от стационарных объектов.
Известен обнаружитель с компенсатором помех [1], использующий широкополосные сигналы, манипулированные по фазе псевдослучайной последовательностью, в котором повышение вероятности обнаружения навигационного сигнала обеспечивается путем воспроизведения копии помехи с учетом времени задержки и последующей компенсацией помехи из входной смеси «сигнал-помеха».
Известно устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы [2], использующее в качестве сигнала подсвета воздушных целей зондирующий радиосигнал наземного передатчика.
Недостатком методов компенсации, используемых в данных устройствах, является то, что для их функционирования необходимо иметь копии компенсируемых помех, что не всегда представляется возможным. Кроме того, в этих устройствах компенсируется только одна помеха.
Для компенсации мешающих радиосигналов применяют пространственную селекцию полезных радиосигналов адаптивными антенными решетками (ААР) с управляемыми «нулями» диаграммы направленности, формируемыми в направлениях на источники мешающих сигналов.
Способы компенсации помех, используемые ААР, позволяют осуществлять управление диаграммой направленности в соответствии с изменяющейся сигнально-помеховой обстановкой и компенсировать несколько помех, приходящих с различных направлений. Однако для функционирования этих ААР требуются априорные сведения о временных характеристиках полезного сигнала [3, 4, 5], либо информация о направлении его прихода [6], что зачастую не представляется возможным.
От этих недостатков свободен метод оптимизации мощности, предложенный Комптоном [7]. Для работы ААР, использующей этот метод, не нужно знать временные характеристики полезного сигнала и направление его прихода. Достаточно иметь сведения о соотношении мощностей полезного и помеховых сигналов. В нашем случае эта информация заключается в том, что зондирующий сигнал и сигналы, отраженные от окружающих объектов, значительно превышают уровень сигнала, отраженного от цели.
Однако в методе Комптона при оценке вектора весовых коэффициентов присутствует константа - скалярный коэффициент усиления, характеризующий усиление контура адаптации, влияющий на устойчивость и скорость оптимизации.
Очевидно, что при фиксированном значении скалярного коэффициента усиления невозможно обеспечить одновременно высокую скорость адаптации и малую дисперсию остаточных помех. Для того чтобы удовлетворить этим двум противоречивым условиям, необходимо иметь большой скалярный коэффициент усиления в переходном режиме и относительно малый - в установившемся процессе адаптации.
Техническая задача изобретения состоит в обеспечении высокой скорости адаптации и малой дисперсии остаточных помех при малых отношениях амплитуды сигнала, отраженного от воздушной цели, к амплитудам помеховых сигналов.
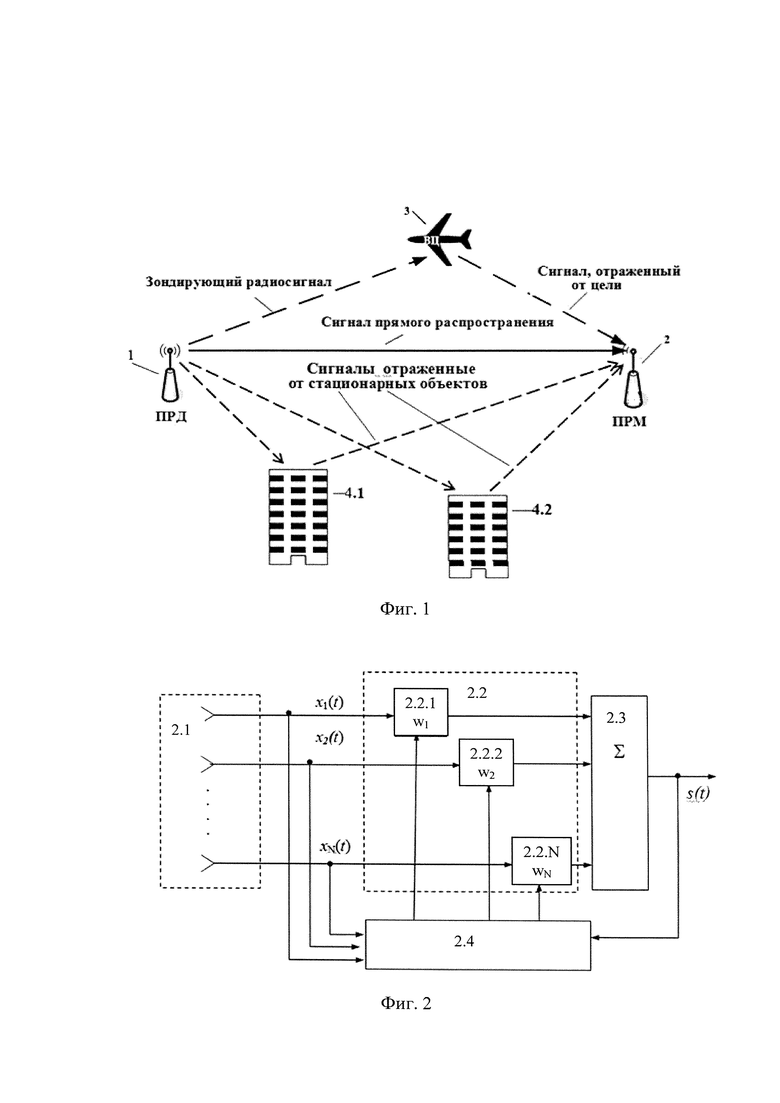
Сущность изобретения поясняется рисунками. На фиг. 1 показана структурная схема бистатической радиолокационной системы, на фиг. 2 приведена структурная схема ААР, на фиг. 3 а) приведены отклики согласованного фильтра, подключенного к выходу сумматора ААР, на зондирующий сигнал u1 прямого распространения от радиопередатчика 1, на сигналы u2, u3, отраженные от стационарных объектов, и на сигнал uц, отраженный от воздушной цели, в отсутствии их компенсации, b) приведена диаграмма направленности ААР в исходном состоянии, выраженная в децибелах, на фиг. 4 а) приведены отклики согласованного фильтра, подключенного к выходу сумматора ААР после компенсации прямого зондирующего сигнала от радиопередатчика, сигналов отраженных от стационарных объектов и результат выделения сигнала uц, отраженного от воздушной цели, b) приведена диаграмма направленности ААР после компенсации, выраженная в децибелах.
Способ пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели в бистатической радиолокационной системе, в котором участвуют радиопередатчик 1, передающий зондирующий сигнал, радиоприемник 2, содержащий ААР, состоящую из антенных элементов 2.1, диаграммообразующей схемы с весовыми коэффициентами 2.2, блока адаптивного управления диаграммой направленности 2.4 и сумматора 2.3, осуществляющий:
- излучение радиопередатчиком 1 зондирующего сигнала,
- прием радиоприемником 2 сигнала, отраженного от воздушной цели 3, а также прямого зондирующего сигнала от радиопередатчика 1 и сигналов, отраженных от стационарных объектов 4, выдачу сигнала на выходе сумматора в виде
с использованием рекурсивной оценки вектора весовых коэффициентов

и ограничений на норму вектора весовых коэффициентов
где  - оператор транспонирования и комплексного сопряжения,
- оператор транспонирования и комплексного сопряжения,
t - отсчеты времени,
 - вектор весовых коэффициентов w1, w2, …, wn,
- вектор весовых коэффициентов w1, w2, …, wn,
k - скалярный коэффициент усиления,
 - вектор комплексных сигналов xa(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов,
- вектор комплексных сигналов xa(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов,
 - градиент среднего квадрата
- градиент среднего квадрата  выходного сигнала s(t), * - оператор комплексного сопряжения.
выходного сигнала s(t), * - оператор комплексного сопряжения.
Если k<0, то адаптивная антенная решетка обеспечивает минимизацию мощности, при k>0 - максимизацию.
Вектор весовых коэффициентов оценивается в виде
с использованием ограничения на норму
где 
 - норма градиента,
- норма градиента,  - норма вектора весовых коэффициентов;
- норма вектора весовых коэффициентов;
 - коэффициент усиления,
- коэффициент усиления,
0<α<1 - константа, обеспечивающая скорость изменения коэффициента усиления k(t).
Благодаря такой оценке:
- вектор весовых коэффициентов W(t) становится независимым от уровня помех в каналах ААР, чем обеспечивается устойчивость способа компенсации;
- коэффициент усиления k(t) увеличивается вдали от экстремума, а в окрестности экстремума экспоненциально уменьшается, что способствует обеспечению высокой скорости адаптации и малого уровня остаточных помех в установившемся режиме.
Результаты моделирования позволяют наглядно показать эффективность предлагаемого способа.
Для примера рассмотрим результаты ослабления прямого зондирующего сигнала от радиопередатчика 1 и двух отраженных сигналов от стационарных объектов 4, при приеме сигнала, отраженного от воздушной цели 3 адаптивной антенной решеткой предлагаемым способом пространственной компенсации. Адаптивная антенная решетка кольцевая, радиусом 0,6 м, содержит семь антенных элементов 2.1, с круговой диаграммой направленности, расположенных равномерно на окружности.
В качестве зондирующего сигнала, излучаемого радиопередатчиком 1 используем фазоманипулированный сигнал с расширением спектра М-последовательностью длиной 1023 дискрета с 10 цифровыми отсчетами на дискрете.
Несущая частота сигнала составляет 300 МГц. Амплитуда сигнала прямого распространения от радиопередатчика 1 на входе ААР равна 1000. Амплитуды двух сигналов, отраженных от стационарных объектов 4.1 и 4.2 равны 500 и 150 соответственно. Амплитуда сигнала, отраженного от воздушной цели 3, равна 20, что в 50 раз меньше амплитуды сигнала прямого распространения от передатчика 1 и меньше амплитуд сигналов, отраженных от стационарных объектов 4. Среднеквадратическое значение аддитивного шума в каналах ААР равно 20, т.е. уровень шума сравним с уровнем сигнала, отраженного от воздушной цели 3.
Направления прихода сигналов составляют: 30° - направление прихода прямого зондирующего сигнала от радиопередатчика 1, 60° и 90° - направления прихода сигналов, отраженных от стационарных объектов 4, 120° - направление прихода сигнала от воздушной цели 3.
Отраженный от воздушной цели 3 сигнал задержан относительно зондирующего сигнала прямого распространения от радиопередатчика 1 на 5870 отсчетов. Отраженные от стационарных объектов 4 сигналы задержаны относительно прямого зондирующего сигнала от радиопередатчика 1 на 1170 и 3130 отсчетов.
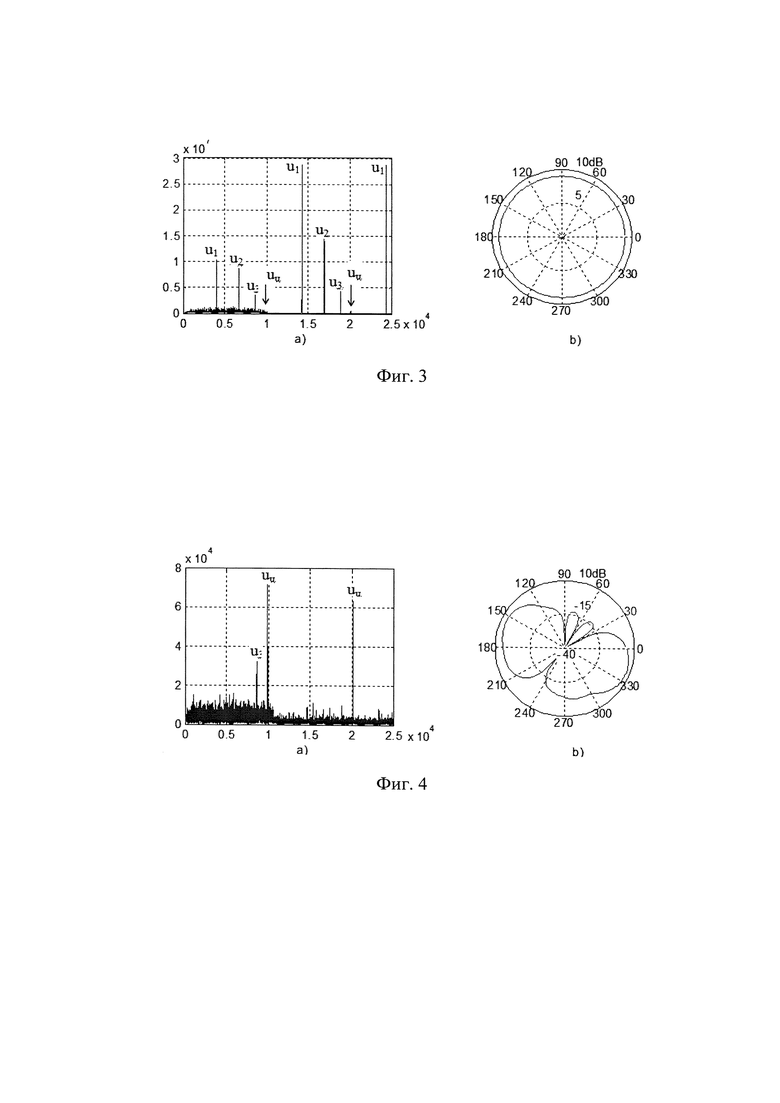
На фиг. 3 а) приведены отклики согласованного фильтра, подключенного к выходу сумматора 2.3 ААР, на зондирующий сигнал u1 прямого распространения от радиопередатчика 1, на сигналы u2, u3, отраженные от стационарных объектов 4 и на радиолокационный сигнал uц, отраженный от воздушной цели 3, в отсутствии их компенсации. На фиг. 3 b) приведена диаграмма направленности ААР до компенсации, выраженная в децибелах. Эта диаграмма имеет круговую форму на уровне около 9 дБ.
На фиг. 4 а) приведены отклики согласованного фильтра, подключенного к выходу сумматора 2.3 ААР после компенсации прямого зондирующего радиолокационного сигнала от радиопередатчика 1, отраженных сигналов от стационарных объектов 4 и результат выделения сигнала uц, отраженного от воздушной цели 3. На фиг. 4 b) приведена диаграмма направленности ААР после компенсации, выраженная в децибелах. При этом константа α, обеспечивающая скорость изменения коэффициента k(t), была равна α=0.15.
Из фиг. 4 b) видно, что в диаграмме направленности в направлениях на сигнал прямого распространения от радиопередатчика 1 и сигналы, отраженные от стационарных объектов 4 сформировались глубокие, около 50 дБ, провалы. В направлении на сигнал uц (120°), отраженный от воздушной цели, уровень диаграммы направленности, равен около 2 дБ. При этом процесс адаптации завершается в течение времени приема первой М-последовательности сигнала.
Таким образом, предлагаемый способ пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели в бистатической радиолокационной системе позволяет:
- компенсировать прямой зондирующий сигнал радиопередатчика 1 и сигналы, отраженные от стационарных объектов 4, значительно превышающие уровень сигнала, отраженного от воздушной цели 3;
- выделить полезный, отраженный от воздушной цели, сигнал.
Список источников
1. Патент 2574860 РФ, МПК Н04В 1/10. Обнаружитель с компенсатором помех / А.В. Журавлев и др. (РФ). Открытое акционерное общество научно-производственное предприятие «ПРОТЕК» (РФ). - №2014152662/07; заявлено 24.12.2014; опублик. 10.02.2016, Бюл 4. - 6 с.: 1 ил.
2. Патент 2716154 РФ, МПК G01S 5/06. Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы / А.В. Журавлев и др. (РФ). - №2014152662/07; заявлено 09.09.2019; опублик. 06.03.2020 Бюл. 7. - 11 с.: 6 ил.
3. Уидроу Б., Стирнз С. Адаптивная обработка сигналов. / Пер. с англ. М: Радио и связь, 1989, 440 с.
4. Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. Введение в теорию / Пер. с англ._М:Радио и связь, 1986. - 448 с.
5. Гриффите Л. Простой адаптивный алгоритм для обработки сигналов антенных решеток в реальном времени // ТИИЭР. - 1969 - Т. 57. - №10, с. 6-14.
6. Фрост III. Алгоритм линейно-ограниченной обработки сигналов в адаптивной решетке. - ТИИЭР, 1972, т. 60. №8, с. 5-14.
7. Compton R.T. Power optimization in adaptive arrays: a technique for interference protection // IEEE Trans. Antennas and Propag. - 1980. - Vol. 28. - №1. p. 70-83.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная антенная решетка для бистатической радиолокационной системы | 2020 |
|
RU2731875C1 |
| Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы | 2019 |
|
RU2734233C1 |
| Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы | 2019 |
|
RU2716154C1 |
| Способ пространственной компенсации помех с использованием информации о направлении на источник сигнала | 2022 |
|
RU2788820C1 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕСОВОГО КОЭФФИЦИЕНТА В УСЛОВИЯХ НЕСТАЦИОНАРНОСТИ ПОМЕХОВОЙ ОБСТАНОВКИ | 2022 |
|
RU2807614C1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| СПОСОБ РАДИОЭЛЕКТРОННОЙ ЗАЩИТЫ НАЗЕМНОЙ РЛС КРУГОВОГО ОБЗОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2586112C1 |
Изобретение относится к радиолокации и предназначено для обнаружения сигнала, отраженного от воздушной цели, на фоне прямого зондирующего сигнала от радиопередатчика, и сигналов, отраженных от стационарных объектов. Техническим результатом изобретения является обеспечение высокой скорости адаптации и малой дисперсии остаточных помех при малых отношениях амплитуды сигнала, отраженного от цели, к амплитудам помеховых сигналов. В способе пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели бистатической радиолокационной системой применяют радиопередатчик, передающий зондирующий сигнал, и радиоприемник, содержащий адаптивную антенную решетку (ААР), состоящую из антенных элементов, диаграммообразующей схемы с весовыми коэффициентами, блока адаптивного управления диаграммой направленности и сумматора. Способ заключается в излучении радиопередатчиком зондирующего сигнала, приеме радиоприемником сигнала, отраженного от воздушной цели, а также прямого зондирующего сигнала от радиопередатчика и сигналов, отраженных от стационарных объектов. На выходе сумматора с использованием рекурсивной оценки вектора весовых коэффициентов выдают сигнал 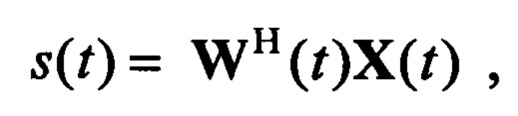 , где - вектор комплексных сигналов xn(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов, - транспонированный и комплексно сопряженный вектор весовых коэффициентов w1, w2, … wN,
, где - вектор комплексных сигналов xn(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов, - транспонированный и комплексно сопряженный вектор весовых коэффициентов w1, w2, … wN,  t - отсчеты времени, k - скалярный коэффициент усиления. При k<0 ААР обеспечивает минимизацию мощности, при k>0 – максимизацию. Обеспечение обнаружения слабого радиосигнала, отраженного от воздушной цели на фоне сильных мешающих сигналов, достигается применением изменяемого коэффициента усиления, определяемого в зависимости от градиента среднего квадрата выходного сигнала s(t). 4 ил.
t - отсчеты времени, k - скалярный коэффициент усиления. При k<0 ААР обеспечивает минимизацию мощности, при k>0 – максимизацию. Обеспечение обнаружения слабого радиосигнала, отраженного от воздушной цели на фоне сильных мешающих сигналов, достигается применением изменяемого коэффициента усиления, определяемого в зависимости от градиента среднего квадрата выходного сигнала s(t). 4 ил.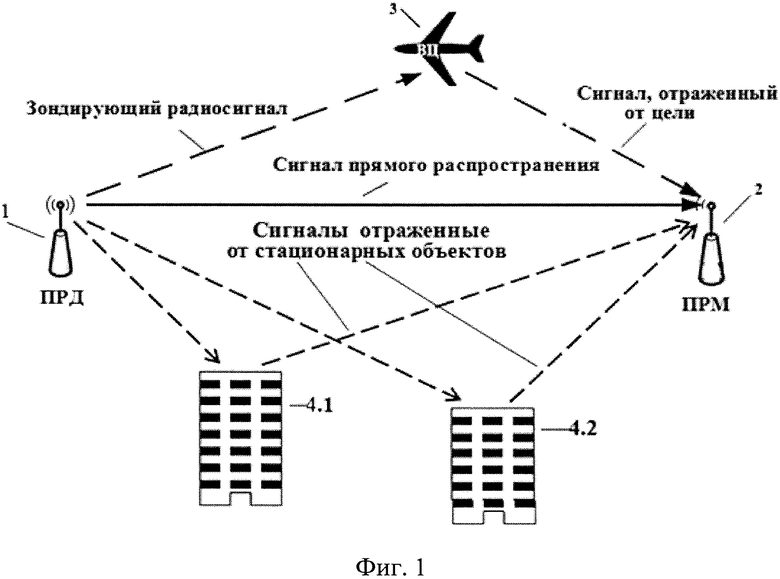
Способ пространственной компенсации прямого и отраженных сигналов при обнаружении отраженного сигнала от воздушной цели бистатической радиолокационной системой, в котором участвуют радиопередатчик, передающий зондирующий сигнал, радиоприемник, содержащий адаптивную антенную решетку, состоящую из антенных элементов, диаграммообразующей схемы с весовыми коэффициентами, блока адаптивного управления диаграммой направленности и сумматора, осуществляющий
- излучение радиопередатчиком зондирующего сигнала,
- прием радиоприемником сигнала, отраженного от воздушной цели, а также прямого зондирующего сигнала от радиопередатчика и сигналов, отраженных от стационарных объектов, и выдачу сигнала на выходе сумматора в виде
с использованием рекурсивной оценки вектора весовых коэффициентов

и ограничений на норму вектора весовых коэффициентов  где
где  - оператор транспонирования и комплексного сопряжения, t - отсчеты времени,
- оператор транспонирования и комплексного сопряжения, t - отсчеты времени,
 - вектор весовых коэффициентов w1, w2, …, wN, k - скалярный коэффициент усиления,
- вектор весовых коэффициентов w1, w2, …, wN, k - скалярный коэффициент усиления,
 - вектор комплексных сигналов xn(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов,
- вектор комплексных сигналов xn(t), n=1, 2, …, N в каналах ААР, N - число антенных элементов,  - градиент среднего квадрата
- градиент среднего квадрата  выходного сигнала s(t), * - оператор комплексного сопряжения, если k<0, то адаптивная антенная решетка обеспечивает минимизацию мощности, при k>0 - максимизацию,
выходного сигнала s(t), * - оператор комплексного сопряжения, если k<0, то адаптивная антенная решетка обеспечивает минимизацию мощности, при k>0 - максимизацию,
отличающийся тем, что с целью обеспечения обнаружения слабого радиосигнала, отраженного от воздушной цели на фоне сильных мешающих сигналов вектор весовых коэффициентов оценивается в виде
с использованием ограничения на норму
где 
 - норма градиента,
- норма градиента,  - норма вектора весовых коэффициентов;
- норма вектора весовых коэффициентов;  - коэффициент усиления, 0<α<1 - константа, обеспечивающая скорость изменения коэффициента усиления k(t).
- коэффициент усиления, 0<α<1 - константа, обеспечивающая скорость изменения коэффициента усиления k(t).
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2018 |
|
RU2683140C1 |
| Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы | 2019 |
|
RU2716154C1 |
| Способ компенсации искажений амплитудно-фазового распределения поля в раскрыве адаптивной антенной решетки, обусловленных влиянием климатических факторов | 2019 |
|
RU2717351C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| КУРБАТСКИЙ С.А., НОВИКОВ А.В., ХОМЯКОВ Д.А | |||
| Алгоритм вычисления вектора весовых коэффициентов в адаптивной антенной решетке // Журнал Известия Тульского государственного университета | |||

