Заявляемое изобретение относится к авиационной технике, а именно к конструкции вертолета, оснащенного различными видами вооружения, комплексом навигации, прицельно-вычислительным комплексом и средствами ночного видения и предназначенного для круглосуточного решения боевых задач, перевозки различных грузов, транспортировки десанта и раненых и их огневого прикрытия.
Известен транспортно-боевой вертолет аналогичного назначения и наиболее близкий по конструкции к заявляемому (см. "Jane's" "ALL THE WORLD'S AIRCRAFT" 1999-2000, p.408). Несущая система вертолета включает несущий винт с втулкой со сферическими металлорезиновыми подшипниками и с лопастями из полимерных композиционных материалов и четырехлопастный Х-образный рулевой винт. Силовая установка содержит два газотурбинных двигателя, пылезащитные устройства и экранно-выхлопные устройства. Вертолет выполнен с неубирающимся шасси. Вертолет содержит также комплекс навигации и электронной индикации. Для решения боевых задач на вертолете предусмотрено размещение несъемной подвижной пушечной установки и установлены комплексы неуправляемого и управляемого ракетного вооружения с круглосуточной обзорно-прицельной системой и прицельно-вычислительный комплекс.
В связи со сложностью задач транспортно-боевого вертолета, оснащенного современными комплексами навигации и электронной индикации, сложностью пилотирования вертолета круглосуточного применения, особенно при взлетах и посадках в ночное время и на малых высотах, а также с учетом существенно увеличенной мощности двигателей силовой установки вертолета на всех режимах выше малого газа - особенно значимым становится обеспечение безопасности вертолета на всех режимах полета.
Однако усовершенствования конструкции и технологии изготовления элементов несущей системы вертолета, в частности, использование обладающих меньшим весом композитных лопастей несущего винта и втулки со сферическими металлорезиновыми подшипниками, а также использование более мощных двигателей - не исключают (вследствие более «чувствительного» управления элементами несущего винта и увеличения мощности на режиме малого газа) возможности на некоторых режимах недопустимого сближения лопастей несущего винта с хвостовой балкой (при резком взятии ручки продольно-поперечного управления «на себя» при предпосадочном маневре, торможении или «пробежке» после посадки вертолета на земле или при выполнении вертикальных фигур пилотажа на высоких скоростях полета). В конечном итоге указанные недостатки снижают эксплуатационную надежность вертолета, в частности, безопасность полетов вертолета на малых высотах, что с учетом боевого круглосуточного применения вертолета недопустимо и потребовало внесения конструктивных изменений в систему управления.
Заявляемое техническое решение направлено на повышение надежности транспортно-боевого вертолета круглосуточного всепогодного применения за счет предотвращения опасного сближения лопастей с хвостовой балкой вертолета на некоторых режимах.
Задачей, решаемой заявляемым изобретением, является повышение эксплуатационной надежности транспортно-боевого вертолета, улучшение летно-технических характеристик, а также повышение его боевой эффективности и безопасности выполнения полетов на малых высотах.
Поставленная цель решена благодаря тому, что в транспортно-боевом вертолете, содержащем фюзеляж, несущий винт с лопастями из полимерных композиционных материалов, четырехлопастный Х-образный рулевой винт, двухдвигательную силовую установку с пылезащитным устройством, систему управления вертолетом, включающую агрегаты и проводки продольного, поперечного управления и объединенного управления общим шагом несущего винта, двигателями и стабилизатором, экранно-выхлопное устройство, неубирающееся шасси, несъемную подвижную пушечную установку, комплекс управляемого ракетного вооружения с круглосуточной обзорно-прицельной системой, прицельно-вычислительный комплекс, комплекс навигации и электронной индикации, неуправляемое ракетное вооружение, система управления вертолетом снабжена гидроупором для возрастания усилия на ручке продольно-поперечного управления при резком движении ручкой в продольном направлении «на себя», при этом гидроупор взаимодействует с верхней угловой качалкой проводки продольного управления при скорости полета более заданной и при положении верхней угловой качалки проводки управления общим шагом, соответствующем установке общего шага несущего винта на угол менее заданного.
Электромагнитный кран включения гидроупора подсоединен к сигнализатору скорости полета и к микровыключателю, шток которого с помощью двуплечего рычага с роликом и профилированного хомута кинематически связан с верхней угловой качалкой проводки управления общим шагом несущего винта.
Заявленные изменения в системе управления вертолетом учитывают динамические свойства несущего винта с лопастями из полимерных композиционных материалов и с втулкой, оборудованной эластомерными подшипниками, позволяют исключить возможность резкого несоразмерного движения ручки продольно-поперечного управления «на себя» при предпосадочном маневре, торможении или «пробежке» после посадки вертолета на земле или при выполнении вертикальных фигур пилотажа на высоких скоростях полета. Это позволит исключить возможность недопустимого сближения лопастей несущего винта с хвостовой балкой на упомянутых режимах и повысить безопасность, надежность и боевую эффективность вертолета транспортно-боевого назначения круглосуточного всепогодного применения.
Внесенные в конструкцию кинематические и схемные решения выполнены с учетом расчетных величин (скорости полета и установки общего шага, соответствующего положению угловой качалки, при которых включается в работу гидроупор), свойственных для конкретной конструкции вертолета и гарантирующих безопасное положение лопастей относительно хвостовой балки на упомянутых режимах.
Включенный в систему управления вертолета гидроупор расположен на кронштейне, закрепленном на шпангоуте рядом с кронштейном с верхними угловыми качалками проводки системы управления, и его шток взаимодействует с опорным выступом угловой качалки продольного управления для ограничения наклона автомата перекоса назад при продольном управлении вертолетом. Гидроупор срабатывает при следующих условиях: в воздухе на скоростях полета более заданной расчетной (например, для вертолета типа МИ-24 - при скорости более 70 км/ч) и на земле при установке общего шага несущего винта (по указателю шага винта) менее заданной величины угла (например, 5 градусов для вертолета типа МИ-24). При этом летчик ощущает резкое возрастание усилий при взятии ручки продольно-поперечного управления «на себя». Это предотвращает возможность недопустимого сближения лопастей несущего винта с хвостовой балкой при резком и несоразмерном движении ручкой управления в продольном направлении в полете (при выполнении вертикальных фигур пилотажа), а также на земле (при рулении) и обеспечивает уменьшение нагрузки на втулку несущего винта. Положение ручки продольно-поперечного управления, при котором летчик ощущает резкое возрастание усилий, обусловленное наличием гидроупора (при выпущенном штоке гидроупора), соответствует наклону тарелки автомата перекоса назад на соответственный угол (2°18`-2°30` для вертолета типа МИ-24). При срабатывании электромагнитного крана происходит подача давления рабочей жидкости в цилиндр гидроупора из гидросистемы вертолета и выход шока из цилиндра гидроупора. В выдвинутый шток упирается угловая качалка продольного управления. При этом ограничивается движение качалки и всей проводки продольного управления при взятии летчиком ручки «на себя».
В полете электромагнитный кран включает гидроупор при подаче на его электромагнит сигнала после срабатывания датчика приборной скорости на заданной расчетной скорости полета (более 70 км/ч для вертолета типа МИ-24).
На земле электромагнитный кран включен при подаче на его электромагнит электросигнала от микровыключателя, шток которого кинематически связан с верхней угловой качалкой проводки управления общим шагом несущего винта. При общем шаге несущего винта менее заданного шток гидроупора остается выдвинутым. Кимематический механизм содержит профилированный хомут, закрепленный на основании качалки общего шага, и двуплечий рычаг, одно плечо которого снабжено роликом, взаимодействующим с профилированным хомутом, а другое плечо нажимает на шток микровыключателя, отключая электромагнитный кран и возвращая шток гидроупора в исходное положение при общем шаге несущего винта более заданной расчетной величины (более 5 градусов по указателю шага винта для МИ-24).
Предлагаемое техническое решение может быть реализовано в конструкции вертолета МИ-35М, который является модернизацией вертолета МИ-24.
Конструкция транспортно-боевого вертолета поясняется чертежами, где изображены:
фиг.1 - транспортно-боевой вертолет, вид сбоку;
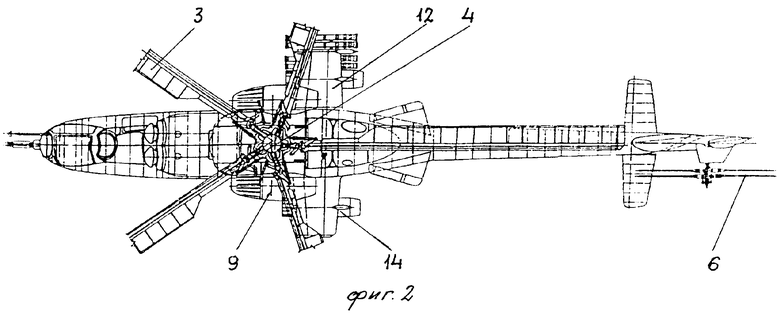
фиг.2 - то же, вид сверху;
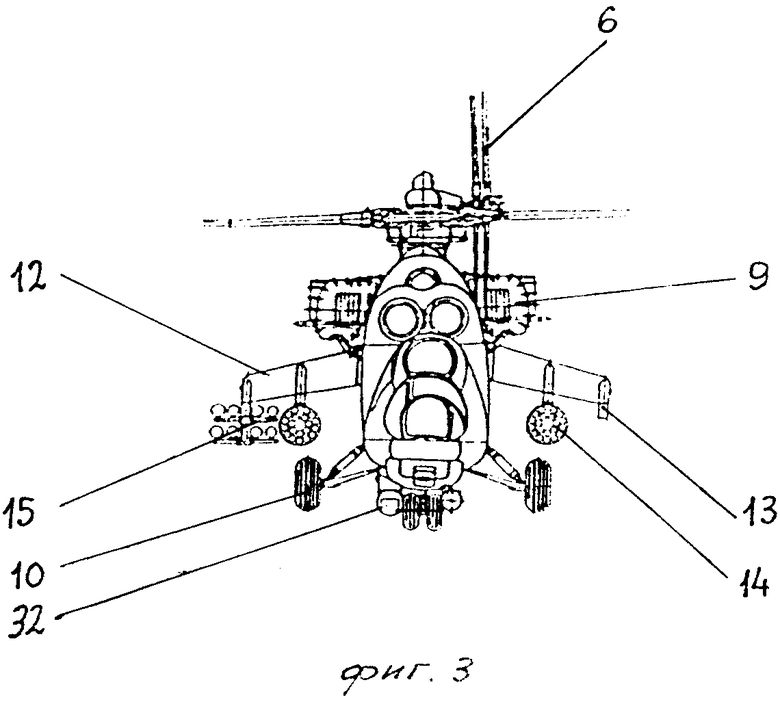
фиг.3 - то же, вид спереди;
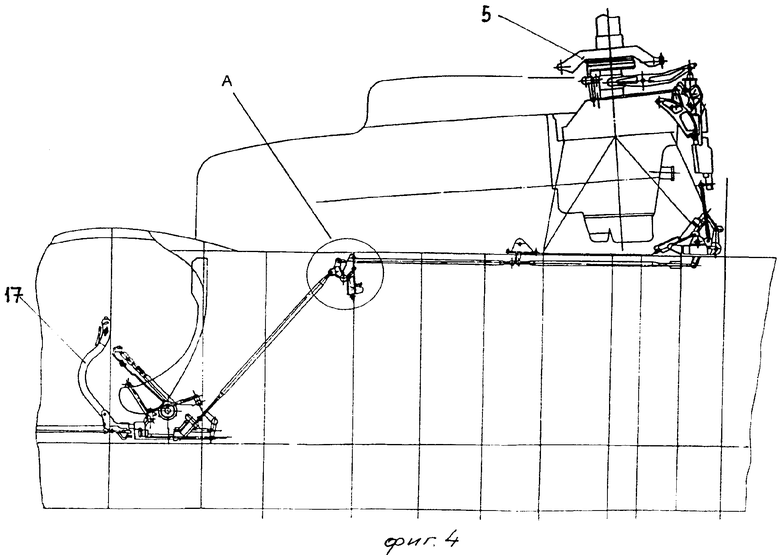
фиг.4 - установка гидроупора в системе управления;
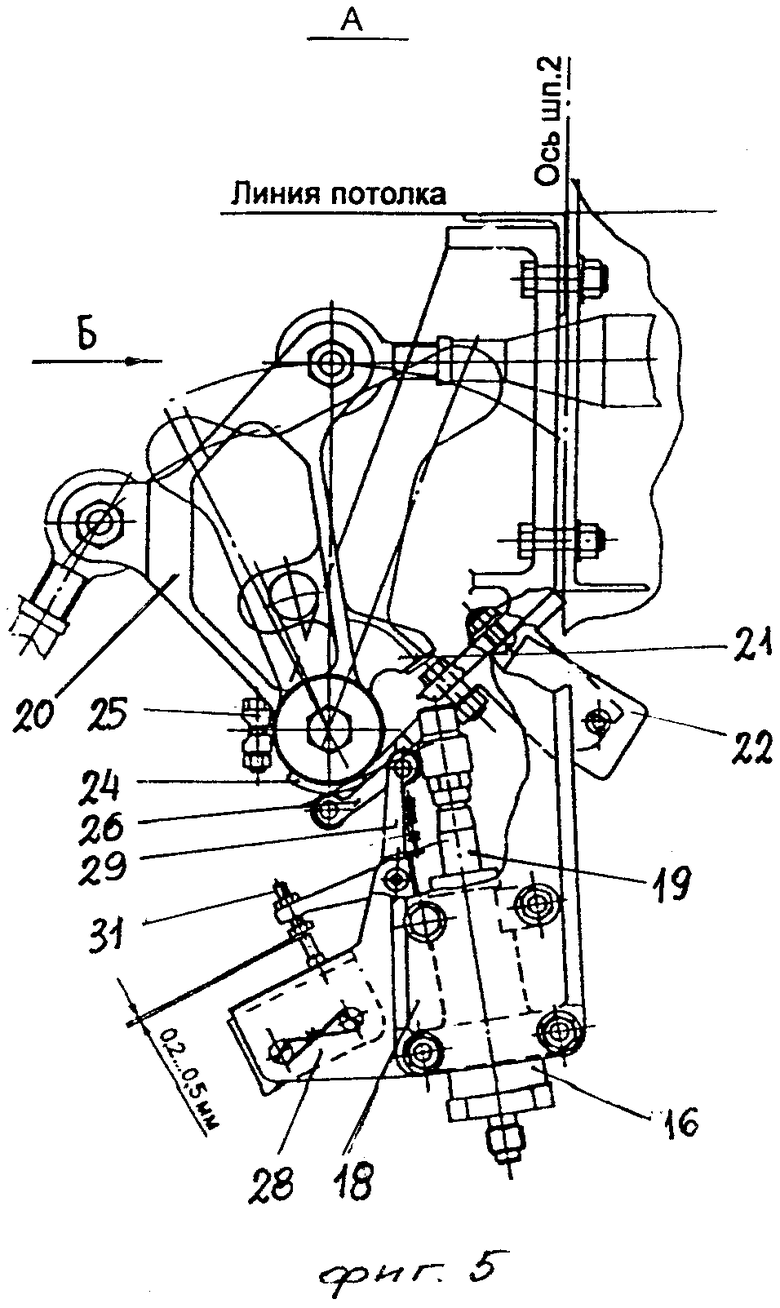
фиг.5 - место А фиг.4;
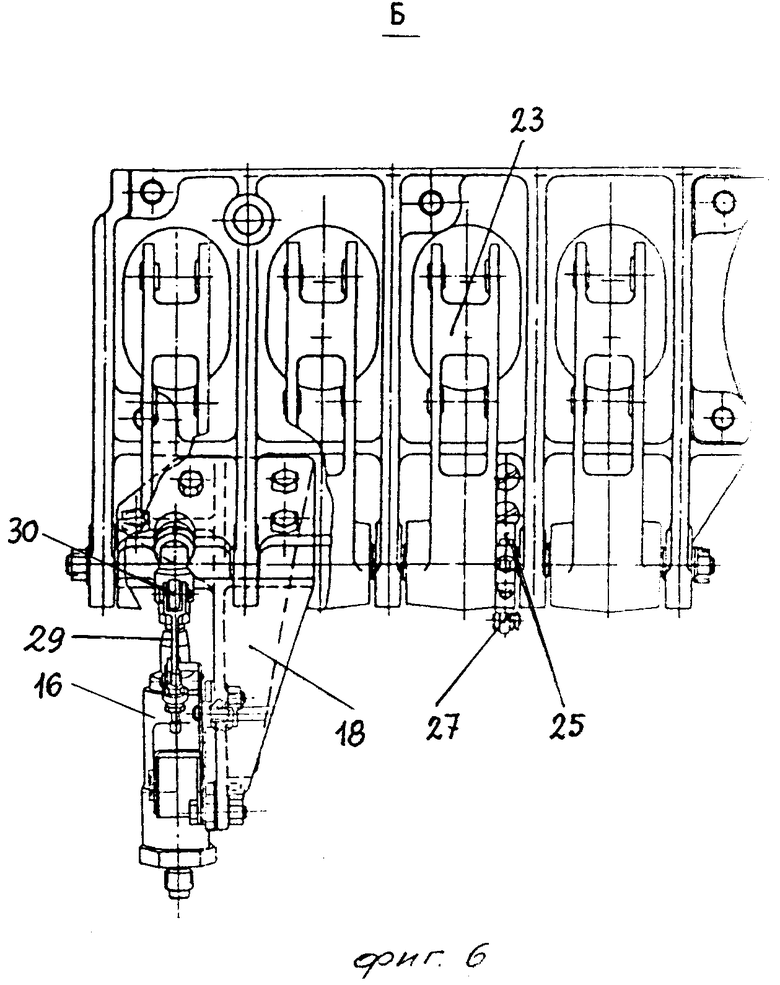
фиг.6 - вид по стрелке Б на фиг.5.
Транспортно-боевой вертолет включает (фиг.1, 2, 3) фюзеляж 1, несущий винт 2 с лопастями 3 из полимерных композиционных материалов, втулкой 4, оборудованной эластомерными подшипниками, и автоматом перекоса 5 и четырехлопастный Х-образный рулевой винт 6. Силовая установка содержит два газотурбинных двигателя 7 с пылезащитными устройствами 8 и экранно-выхлопными устройствами 9. Шасси 10 выполнено неубирающимся. В передней части фюзеляжа 1 установлена несъемная подвижная пушечная установка 11. На каждой консоли крыла 12, укороченной в сравнении с вертолетом МИ-24, установлены (фиг.3) по два балочных держателя 13 для подвески двух неуправляемых ракет 14 и одной пусковой установки 15 справа.
С целью обеспечения круглосуточного боевого применения вертолет оснащен комплексом управляемого ракетного вооружения, прицельно-вычислительным комплексом, комплексом навигации и электронной индикации, средствами ночного видения (на чертеже не показаны). Модернизированный комплекс управляемого ракетного вооружения выполнен с круглосуточным обзорно-прицельным комплексом на основе гиростабилизированной оптико-электронной системы. Кабина вертолета оснащена средствами адаптации светотехнического и светосигнального оборудования для используемых экипажем очков ночного видения.
В связи с использованием на вертолете лопастей несущего винта из полимерных композиционных материалов, обладающих меньшей массой, увеличенным ресурсом и повышенной боевой живучестью, втулки несущего винта, автомата перекоса и рулевого винта изменены кинематика системы управления вертолета и величины регулировочных данных.
Система управления вертолетом включает агрегаты и проводки продольного управления, поперечного управления и объединенного управления общим шагом несущего винта, двигателями и стабилизатором (фиг.4, 5, 6) с системой качалок и тяг. Система снабжена гидроупором 16 продольного управления (фиг.5, 6), предназначенным для возрастания усилия на ручке 17 продольно-поперечного управления при резком движении ручкой в продольном направлении «на себя» во избежание касания лопастями несущего винта хвостовой балки. Гидроупор 16 расположен на кронштейне 18 (фиг.6), который крепится к шпангоуту фюзеляжа. Шток 19 гидроупора 16 взаимодействует с верхней угловой качалкой 20 проводки продольного управления, которая имеет ответный опорный выступ 21 (фиг.5).
Подача давления рабочей жидкости из гидросистемы вертолета в цилиндр гидроупора 16 осуществляется при включении электромагнитного крана (не показан), установленного в редукторном отсеке и включающегося при подаче на его электромагнит электросигнала напряжением 27 вольт через штепсельный разъем (принципиальная электрическая схема управления гидроупором не показана).
Схема управления гидроупором 16 предусматривает включение электромагнитного крана после срабатывания датчика приборной скорости на заданной расчетной скорости полета (более 70 км/ч для вертолета типа МИ-24) и при установке общего шага несущего винта менее заданной расчетной величины (менее 5 градусов по указателю шага несущего винта для вертолета типа МИ-24). Упомянутые заданные величины рассчитаны из условия предотвращения недопустимого сближения лопастей несущего винта с хвостовой балкой при резком и несоразмерном движении ручкой управления в продольном направлении в полете при выполнении вертикальных фигур пилотажа, а также на земле при рулении вертолета.
Для срабатывания гидроупора 16 в воздухе при скорости полета более заданной расчетной величины электромагнитный кран включения гидроупора 16 подсоединен к сигнализатору скорости полета датчика приборной скорости в кабине экипажа (не показан).
Для срабатывания гидроупора 16 на земле при положении общего шага несущего винта менее заданной расчетной величины электромагнитный кран включения гидроупора 16 подсоединен к источнику напряжения через нормально замкнутый микровыключатель 22 общего шага, кинематически связанный с верхней угловой качалкой 23 проводки управления общим шагом несущего винта. Сбоку на основании качалки 23 общего шага установлен хомут 24 с профилированной поверхностью, закрепленный стяжным болтом 25. Хомут 24 взаимодействует своей профилированной поверхностью с установленным на двуплечем рычаге 26 роликом 27. Другим своим плечом рычаг 26 взаимодействует со штоком нормально замкнутого микровыключателя 22, подающего сигнал на электромагнитный кран включения гидроупора 16.
Работа транспортно-боевого вертолета с гидроупором в системе управления происходит следующим образом.
При установке общего шага несущего в пределах заданной величины (от 0 до 5 градусов), с соответственным поворотом угловой качалки 23 общего шага, между штоком микровыключателя 22 и взаимодействующим с ним плечом рычага 26, снабженным регулировочным винтом (не показан), сохраняется предварительно установленный зазор. При этом контакты микровыключателя 22 замкнуты, напряжение на электромагнитный кран гидроупора 16 подано, шток 19 гидроупора выпущен, и в его выдвинутый шток упирается своим опорным выступом 21 угловая качалка 20 продольного управления. При этом в соответственном диапазоне перемещения ручки в продольном направлении «на себя» летчик ощущает резкое возрастание (барьер) усилий, обусловленное гидроупором 16.
При положении верхней угловой качалки 23 общего шага, соответствующем установке общего шага несущего винта более заданной величины (более 5 градусов), двуплечий рычаг 26 (плечом с регулировочным винтом) нажимает на шток нормально замкнутого микровыключателя 22, разрывая цепь и подавая сигнал на электромагнитный кран на отключение гидроупора 16. При отключенном гидроупоре микровыключатель 22 должен иметь запас хода в диапазоне возможных величин углов общего шага более заданного для данного вертолета (5-14 градусов для вертолета типа МИ-24).
Однако электросхема управления гидроупором 16 обеспечивает его срабатывание только в том случае, когда электросигнал на включение гидроупора поступает одновременно от микровыключателя 22 и от дополнительного микровыключателя, установленного на амортизационной стойке основной опоры шасси (не показана) при обжатии амортизатора.
Для сигнализации летчику о состоянии гидроупора на световом табло в кабине экипажа на том же кронштейне 18 установлен микровыключатель 28 и двуплечий рычаг 29 с роликом 30, взаимодействующим с профилированным участком в верхней части штока 19, и с регулировочным винтом 31 на конце другого плеча, взаимодействующим со штоком микровыключателя 28. При выдвижении штока 19 гидроупора 16 и повороте двуплечего рычага 29 регулировочный винт 31 нажимает на шток микровыключателя 28, который остается включенным в рабочем диапазоне хода штока 19, имеет дополнительный ход штока после срабатывания и отключается при уборке штока 19 в исходное положение. При убранном штоке 19 гидроупора 16 имеется зазор между штоком микровыключателя 28 и регулировочным винтом 31. Микровыключатель 28 включен в схему управления гидроупора 16 таким образом, что при поступлении электросигнала на электромагнитный кран гидроупора 16 и непоступлении через установленный интервал времени сигнала от микровыключателя 28 или при снятии электросигнала с электромагнитного крана и неснятии сигнала с микровыключателя 28 - загорается табло «ОТКАЗ УПОРА».
Модернизированный комплекс управляемого ракетного вооружения выполнен с круглосуточным обзорно-прицельным комплексом на основе гиростабилизированной оптико-электронной системы (ГОЭС) 32, установленной (фиг.3) в носовой части фюзеляжа 1, в которой в ее подвижной гиростабилизированной платформе размещены модули тепловизионного, телевизионного и дальномерного каналов, системы стабилизации и управления и пеленгационного канала наведения противотанковых управляемых ракет. Комплекс предназначен для уничтожения неподвижных и подвижных наземных целей, малоскоростных воздушных целей, живой силы противника в простых и ограниченно-сложных метеоусловиях.
Наличие гидроупора в системе управления в конечном счете повысит безопасность и надежность при взлетах и посадках в ночное время и на малых высотах и боевую эффективность транспортно-боевого вертолета, оснащенного современной авионикой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| БОЕВОЙ ВЕРТОЛЕТ | 2007 |
|
RU2338667C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ (варианты) | 2021 |
|
RU2768998C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| Скоростной двухвинтовой вертолет соосной схемы | 2016 |
|
RU2658467C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
Изобретение относится к области вертолетостроения. Транспортно-боевой вертолет содержит фюзеляж, несущий винт с лопастями из полимерных композиционных материалов, четырехлопастный Х-образный рулевой винт, двухдвигательную силовую установку с пылезащитным устройством, систему управления вертолетом, экранно-выхлопное устройство, неубирающееся шасси, несъемную подвижную пушечную установку. Система управления снабжена гидроупором. Гидроупор взаимодействует с верхней угловой качалкой проводки продольного управления. Для этого электромагнитный кран включения гидроупора подсоединен к сигнализатору скорости полета и к микровыключателю, шток которого с помощью двуплечего рычага с роликом и профилированного хомута кинематически связан с верхней угловой качалкой проводки управления общим шагом несущего винта. Изобретение направлено на повышение надежности транспортно-боевого вертолета. 1 з.п. ф-лы, 6 ил.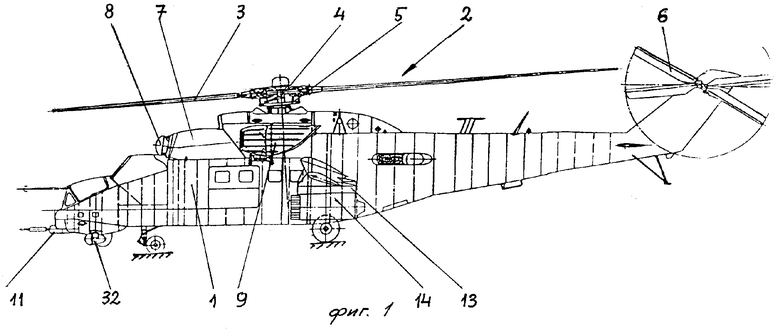
| СИСТЕМА ПУТЕВОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА С РУЛЕВЫМ ВИНТОМ | 1983 |
|
SU1208721A1 |
| RU 1304303 А1, 10.06.2006 | |||
| GB 758646 А, 10.10.1956. | |||

