Группа изобретений относится к авиационной технике и может быть использована в системе управления летательным аппаратом, преимущественно боевым вертолетом, со «спаренной» системой управления.
Особенность системы управления боевого вертолета состоит в следующем. Экипаж боевого вертолета состоит из пилота и оператора. Пилот управляет полетом вертолета, а оператор ведет боевые действия. При нормальном полете пилот управляет вертолетом с помощью органов управления в кабине пилота, которые соединены системой тяг и качалок основной проводки по каналам управления общим шагом, продольным, поперечным и ножным управлением.
При возникновении ситуации, когда пилот не может управлять вертолетом (например, при его ранении), оператор должен иметь возможность взять управление вертолетом на себя, для чего он должен подключить органы управления на своем рабочем месте, находящиеся до этого в походном (отключенном) положении, к проводке к органам управления на рабочем месте пилота.
Известна близкая по назначению и конструкции (и принятая за ближайший аналог) система управления вертолетом Ми-24А (Техническое описание, книга 11, конструкция вертолета, Москва, «Машиностроение», 1977, с.69-78, с.75 п.9.2.2, с.73 рис.64), в которой вторые (спаренные) органы управления расположены на рабочем месте оператора и включают в себя ручку продольно-поперечного управления и ручку «Шаг-газ», присоединенные линиями тяг к соответствующим качалкам агрегата управления, и педали путевого управления, соединенные системой тяг и качалок с педалями на рабочем месте летчика. С целью обеспечения удобства работы оператора, когда он не управляет вертолетом, опорные площадки педалей убираются в стороны и фиксируются в походном положении. При освобождении фиксатора опорные площадки педалей переводятся в рабочее положение с помощью пружин. В других каналах управления в походном положении органы управления на рабочем месте оператора постоянно связаны с соответствующими органами на рабочем месте летчика, что создает неудобства для работы оператора.
Известна конструкция трехпозиционного пневмоцилиндра, который содержит расположенные в рабочем цилиндре поршень со штоком и две втулки, взаимодействующие с поршнем и снабженные буртиками, примыкающими к внутреннему выступу цилиндра и фиксирующими поршень в его центральном положении относительно цилиндра (см. каталог фирмы Rexroth Bosch Group, Multi-position Air Cylinders, Three Position, Air Centered) (http://www.boschrexroth- Pneumatic Actuators & Positioners/Mobile Type Air Cylinders). Рабочий цилиндр имеет два входных канала для подачи воздуха и два отверстия, связанные с атмосферой, с регулируемыми клапанами. При подаче равного давления в его полости по разные стороны поршня последний может быть зафиксирован в центральном положении, а при поступлении давления только через один входной канал шток поршня перемещается в свое отведенное от центра положение.
Такая конструкция пневмо- или гидроцилиндра может быть использована в системе управления вертолетом в качестве так называемой «раздвижной тяги». Раздвижная тяга на основе такого пневмоцилиндра может быть выполнена с возможностью по сигналу оператора установить жесткое сцепление штока тяги с корпусом и корпуса с качалкой основной проводки и таким образом обеспечить подключение ручки управления на рабочем месте оператора к системе управления. В расцепленном положении тяга позволяет ее штоку, подсоединенному к основной проводке управления, свободно перемещаться относительно корпуса вдоль его оси.
Недостатком такой конструкции пневмоцилиндра (при возможности его использованиия в качестве раздвижной тяги) является то, что фиксация поршня возможна только при наличии давления в цилиндре. Такую конструкцию пневмоцилиндра нельзя применить в системе управления боевым вертолетом, так как во время боя трубопроводы со сжатым воздухом могут быть повреждены, и, следовательно, управление вертолетом становится невозможным.
Задачей, решаемой заявляемой группой изобретений, является создание системы управления вертолетом, в которой средства присоединения органов управления на рабочем месте оператора к основной проводке обеспечивают оптимальное расположение органов управления в соответствующем канале в момент подключения оператора к управлению, а также обеспечивают компактное расположение органов управления в кабине оператора в их «походном» (отключенном от основной проводки) положении в соответствии с требованиями эргономики для комфортного размещения и удобства выполнения основной работы оператора.
Другой задачей является повышение живучести системы за счет сохранения работоспособности конструктивных средств для присоединения (и отсоединения) органов управления оператора к основной проводке при повреждении пневматической (или гидравлической) системы вертолета.
Поставленная задача решена благодаря тому, что в системе управления вертолетом, содержащей тяги основной проводки по каналам управления к органам управления на рабочем месте летчика и тяги проводки к органам управления на рабочем месте оператора со средствами присоединения их к основной проводке по сигналу оператора на подачу давления от пневмосистемы, - в соответствии с заявляемым изобретением - в проводке к органам управления на рабочем месте оператора в каждом канале управления установлена одна пневматически управляемая раздвижная тяга, шток с поршнем которой соединен с наконечником тяги со стороны связи с основной проводкой, а корпус рабочего пневмоцилиндра - с другим наконечником, при этом раздвижная тяга снабжена средствами для механической фиксации поршня относительно корпуса при крайнем или среднем положении рабочего хода поршня в соответствии с заданным положением органа управления на рабочем месте оператора в соответствующем канале управления при его присоединении к основной проводке с возможностью расфиксации поршня и свободного перемещения штока с поршнем в корпусе при работе основной проводки от органов управления на рабочем месте летчика.
В частности, целесообразно ручку продольно-поперечного управления оператора в продольном управлении и рычаг управления общим шагом подсоединить к органам управления летчика с помощью раздвижной тяги с фиксацией поршня в крайнем положении рабочего хода, а ручку продольно-поперечного управления оператора в поперечном управлении и педали ножного управления - с помощью раздвижной тяги с фиксацией поршня в среднем положении рабочего хода.
Заявляемая система управления вертолетом может быть выполнена как пневматической, так и гидравлической.
Задачи, поставленные перед группой изобретений, решаются также тем, что раздвижная тяга проводки системы управления вертолетом, предназначенная для проводки к органам управления оператора и содержащая корпус рабочего пневмоцилиндра, шток с рабочим поршнем и штуцеры для подачи давления в рабочие полости цилиндра, в соответствии с заявляемым изобретением (по п.2 формулы) снабжена пневмоцилиндром, фиксирующим рабочий поршень раздвижной тяги относительно корпуса, причем корпус фиксирующего пневмоцилиндра присоединен снаружи радиально к корпусу рабочего пневмоцилиндра раздвижной тяги, а его двусторонний шток одним концом в выдвинутом положении взаимодействует с кольцевой выемкой, выполненной в теле рабочего поршня раздвижной тяги, а другим концом - с механическим фиксатором в виде подпружиненного шарика, для которого в теле двустороннего штока выполнена пара кольцевых канавок для механической фиксации двустороннего штока в выдвинутом и в убранном положении при отсутствии давления в рабочих полостях фиксирующего пневмоцилиндра.
В раздвижной тяге (по п.3 формулы) кольцевая выемка в теле поршня может быть расположена напротив штока фиксирующего пневмоцилиндра при крайнем положении рабочего хода поршня раздвижной тяги в соответствии с заданным крайним положением соответствующего органа в канале управления оператора при его подключении к основной проводке.
Раздвижная тяга (по п.4 формулы) может быть снабжена дополнительным поршнем, свободно надетым на шток раздвижной тяги, при этом для дополнительного поршня, площадь которого больше площади основного поршня, в корпусе раздвижной тяги выполнен упор, расположенный таким образом, что при положении дополнительного поршня на упоре основной поршень упирается в дополнительный поршень, а кольцевая выемка в теле основного поршня при этом расположена напротив штока фиксирующего пневмоцилиндра при среднем положении рабочего хода поршня раздвижной тяги в соответствии с заданным средним положением соответствующего органа управления оператора при его подключении к основной проводке.
Унифицированная и достаточно простая и надежная пневмоуправляемая раздвижная тяга присоединяет соответствующий орган управления на рабочем месте оператора к основной проводке управления в оптимальном для конкретного канала управления выбранном положении при передаче управления вертолетом оператору в аварийной ситуации. В расцепленном положении раздвижной тяги (при расфиксации рабочего поршня) ее штоку, через наконечник постоянно подсоединенному к основной проводке управления, обеспечена возможность вместе с поршнем свободно перемещаться относительно корпуса пневмоцилиндра вдоль его оси (в соответствии с работой основной проводки от летчика). Предлагаемая конструкция раздвижной тяги в соответствии с пп.2 и 4 формулы предназначена для фиксации рабочего поршня в среднем положении рабочего хода. В частности, она дает возможность подключать органы поперечного и ножного управлений в своем среднем положении. Это позволит избавиться от описанных выше недостатков, так как ручка продольно-поперечного управления в походном положении будет находиться в плоскости продольной оси вертолета, а педали - в своем среднем положении, и, следовательно, оператор может опираться на педали как на ровную площадку. Повышается эффективность работы оператора как при выполнении свойственных ему задач, так и при управлении вертолетом в качестве пилота в аварийной ситуации. При этом конструкция раздвижной тяги позволяет по сигналу от оператора механически зафиксировать подсоединение ее к основной проводке системы управления вертолетом и сохранять зафиксированное (или расфиксированное) положение при отсутствии давления в полостях фиксирующего пневмоцилиндра, например, при повреждении трубопровода пневмосистемы. Это повышает надежность летательного аппарата и его живучесть в аварийной ситуации.
Сущность предлагаемого изобретения поясняется чертежами, на которых изображены:
фиг.1 - система управления вертолетом;
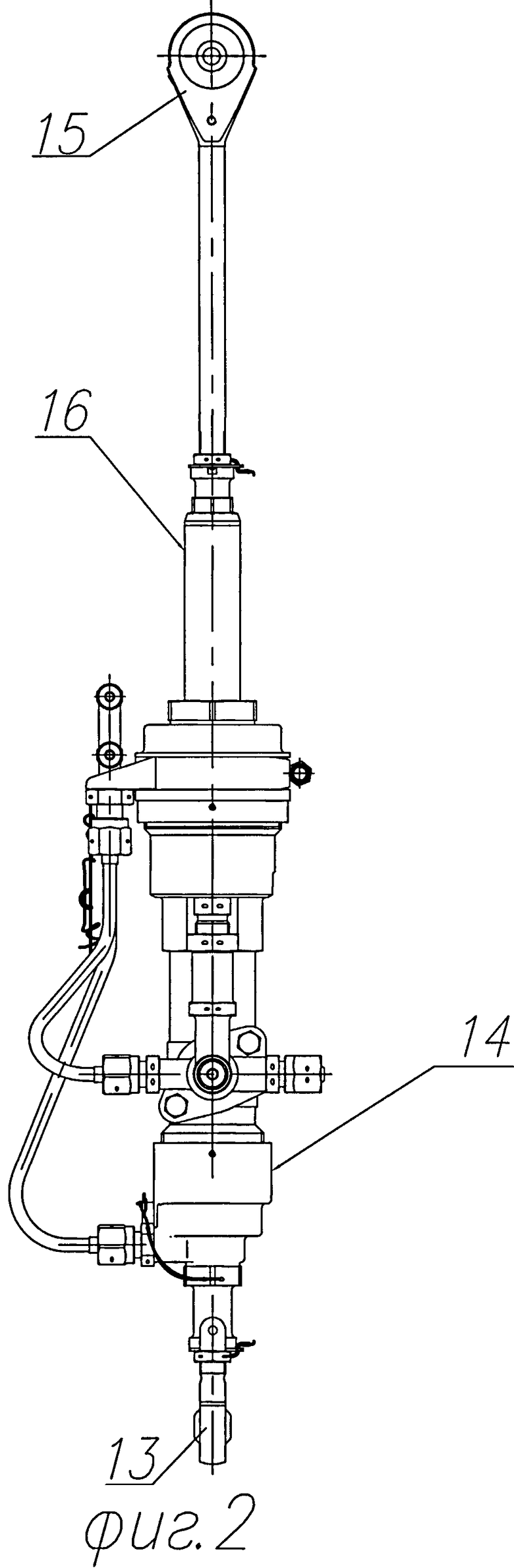
фиг.2 - раздвижная тяга с фиксацией поршня в среднем положении рабочего хода поршня;
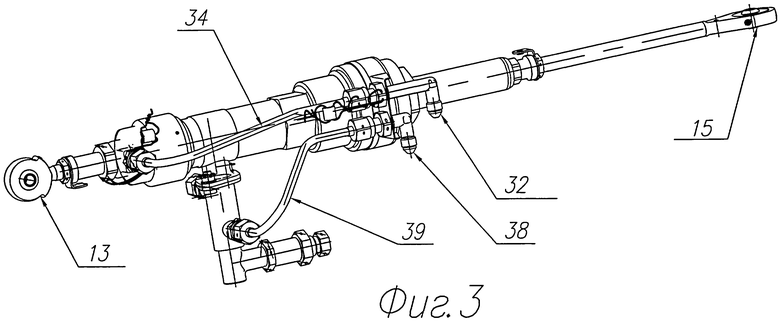
фиг.3 - трехмерное изображение фиг.2;
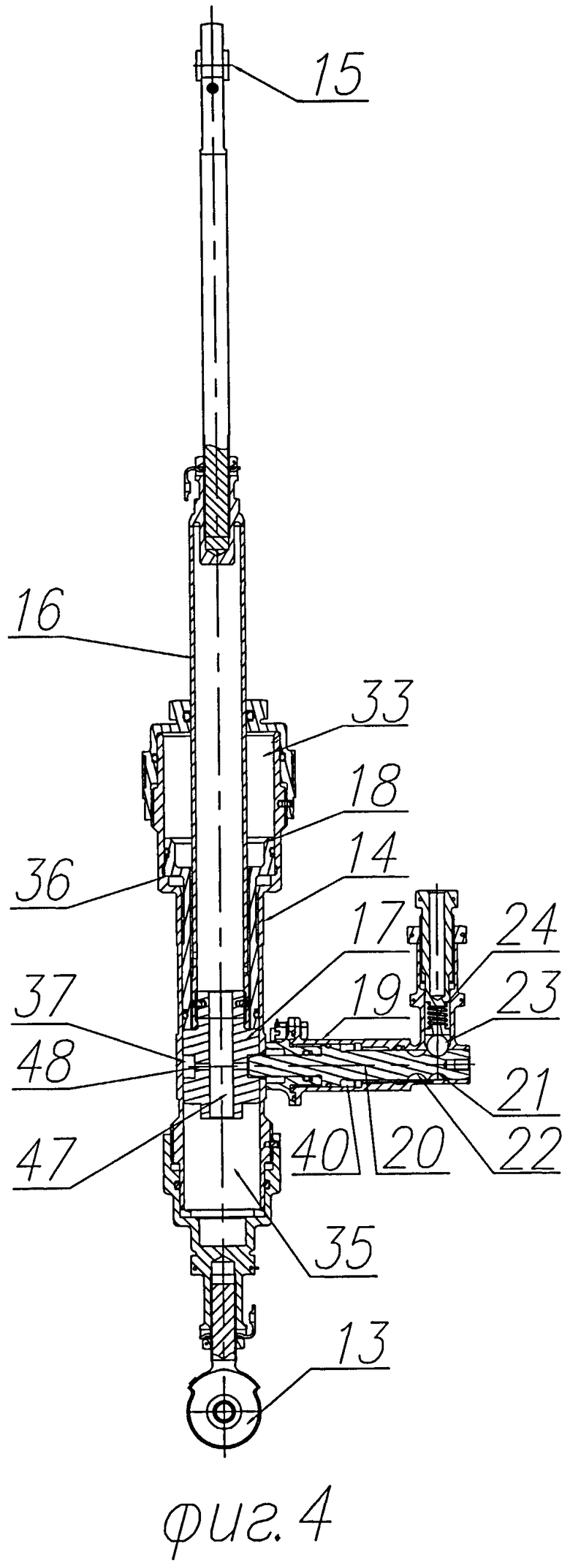
фиг.4 - продольный разрез фиг.2;
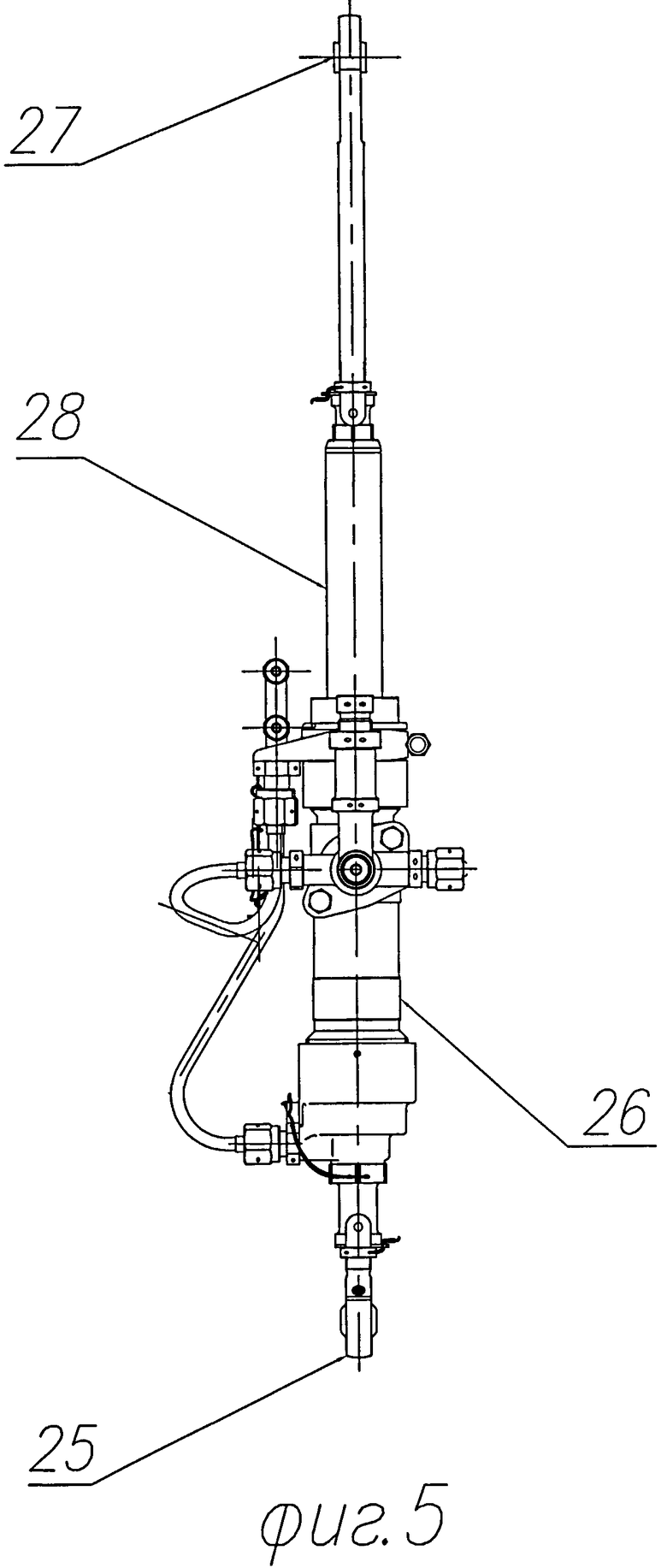
фиг.5 - раздвижная тяга с фиксацией поршня в крайнем положении рабочего хода поршня;
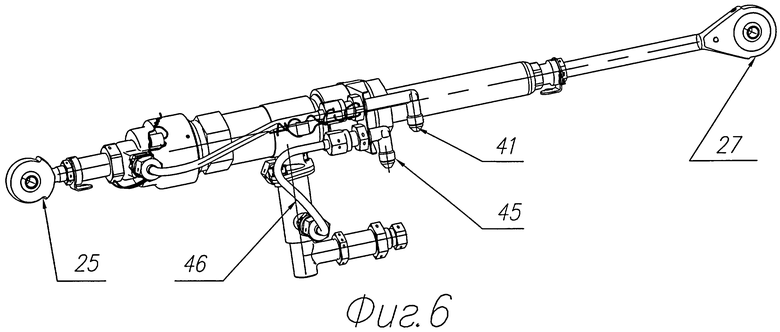
фиг.6 - трехмерное изображение фиг.5;
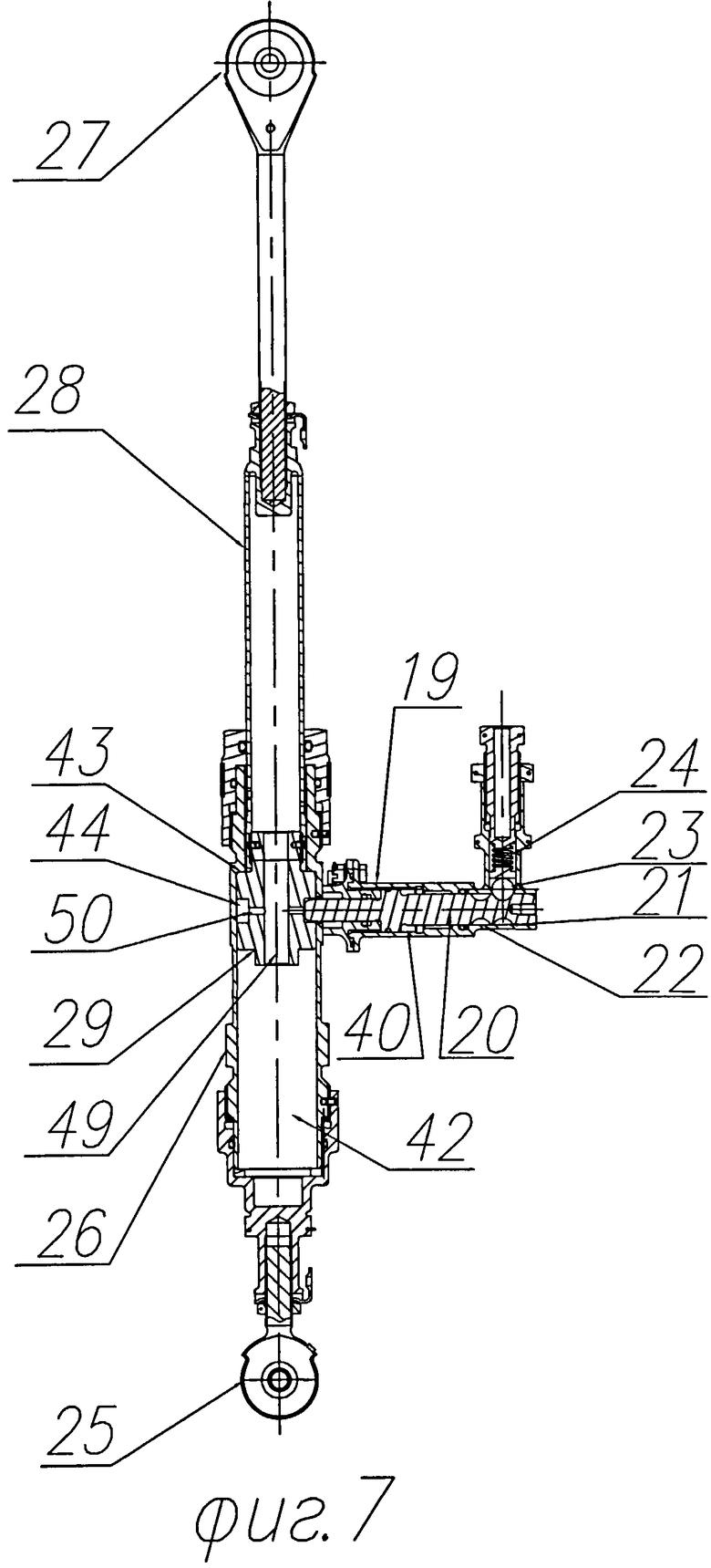
фиг.7 - продольный разрез фиг.5.
Система управления вертолетом (фиг.1) состоит из тяг основной проводки 1, которые соединяют ручку продольно-поперечного управления 2, рычаг управления общим шагом 3 и педали ножного управления 4, расположенные на рабочем месте летчика, с несущим и рулевым винтами.
Система управления оператора (фиг.1) состоит из тяг проводки оператора 5, которые соединяют органы управления оператора с органами управления летчика посредством раздвижных тяг. А именно, ручка продольно-поперечного управления 6 в продольном управлении подсоединяется посредством раздвижной тяги 7, в поперечном управлении посредством раздвижной тяги 8, рычаг управления общим шагом 9 посредством раздвижной тяги 10, педали ножного управления 11 посредством раздвижной тяги 12.
Раздвижные тяги 8 и 12, соответственно, поперечного и ножного управлений (фиг.2, 3, 4) подсоединяют органы управления оператора к органам управления летчика в среднем положении своего рабочего хода и показаны в застопоренном положении. Наконечник 13, установленный в корпусе рабочего пневмоцилиндра 14 раздвижной тяги, соединен с органами управления оператора. Наконечник 15, установленный в штоке 16 с рабочим поршнем 17, подсоединен к основной проводке летчика. На штоке 16 внутри корпуса рабочего пневмоцилиндра 14 расположен дополнительный поршень 18. На корпусе рабочего пневмоцилиндра 14 неподвижно закреплен фиксатор, состоящий из корпуса 19, внутри которого находится шток 20 фиксатора, на котором расположены кольцевые канавки 21 и 22. В кольцевой канавке 21 установлен шарик 23, поджатый пружиной 24.
Раздвижные тяги 7 и 10, соответственно, продольного управления и управления общим шагом (фиг.5, 6, 7) подсоединяют органы управления оператора к органам управления летчика в крайнем положении своего рабочего хода и показаны в застопоренном положении. Наконечник 25, установленный в корпусе рабочего пневмоцилиндра 26 раздвижной тяги, соединен с органами управления оператора. Наконечник 27, установленный в штоке 28 с рабочим поршнем 29, подсоединен к основной проводке летчика. На корпусе рабочего пневмоцилиндра 26 неподвижно закреплен фиксатор, состоящий из корпуса фиксатора 19, внутри которого находится шток фиксатора 20, на котором расположены кольцевые канавки 21 и 22. В кольцевой канавке 21 установлен шарик 23, поджатый пружиной 24.
Система управления вертолетом работает следующим образом.
Исходное положение: органы управления оператора находятся в походном положении, т.е. ручка продольно-поперечного управления 5 (фиг.1) находится по оси вертолета в крайнем переднем положении, рычаг управления общим шагом 6 - в крайнем нижнем положении.
В аварийной ситуации оператор выдвигает ручку продольно-поперечного управления 6 от приборной панели. Удерживая эту ручку в руках, он поворачивает флажок 30 рычага подключения управления 31, расположенного на ручке продольно-поперечного управления 6, рычаг 31 под действием пружины поворачивается и механически разблокирует педали 11. При этом срабатывает микровыключатель (не показан), установленный в механизме, фиксирующем педали 11. В результате срабатывания микровыключателя электропитание подается на электромагнитный кран, и воздух из пневмосистемы поступает к пневматическим раздвижным тягам 7 (продольное управление), 8 (поперечное управление), 10 (управление общим шагом), 12 (ножное управление).
В раздвижные тяги 8 и 12, штоки которых устанавливаются в среднее положение, воздух подается через штуцер 32 (фиг.3). Далее воздух поступает в полость 33 (фиг.4) и по трубке 34 (фиг.3) - в полость 35 (фиг.4). Под действием давления рабочий поршень 17 (фиг.4) и дополнительный поршень 18 движутся навстречу друг другу. Площадь дополнительного поршня должна быть в 2 раза больше площади основного поршня. Это определяется из условия равенства усилий, требующихся для перемещения органов управления оператора в положения, соответствующие положениям органов управления пилота, в одну и другую стороны. Так как площадь дополнительного поршня 18 больше площади рабочего поршня 17, то дополнительный поршень 18, встретившись с рабочим поршнем 17, пересиливает его и упирается в упор 36. При этом рабочий поршень 17, упираясь в дополнительный поршень 18, располагается в корпусе рабочего пневмоцилиндра 14 таким образом, что его кольцевая выемка 37 устанавливается напротив штока 20 фиксатора.
С задержкой по времени, необходимой для установки рабочего поршня 17 напротив фиксатора и обеспечивающейся с помощью реле времени, воздух подается в штуцер 38 (фиг.3). Далее воздух поступает по трубке 39 в полость 40 (фиг.4) фиксатора. Под действием давления шток фиксатора 20 входит в кольцевую выемку 37 рабочего поршня 17, при этом шарик 23 перемещается из кольцевой канавки 22 в кольцевую канавку 21, тем самым механически фиксируя рабочий поршень 17 внутри корпуса рабочего пневмоцилиндра 14. После этого давление воздуха из полостей 33, 35 и 40 стравливается. Таким образом осуществлено механическое подсоединение органов управления оператора в поперечном и ножном управлениях к органам управления летчика.
Одновременно с работой раздвижных тяг 8 и 12 осуществляется работа раздвижных тяг 7 и 10, штоки которых устанавливаются в крайнее положение. Воздух подается через штуцер 41 (фиг.6) в полость 42 (фиг.7). Под действием давления рабочий поршень 29 движется и упирается в упор 43, при этом его кольцевая выемка 44 устанавливается напротив штока 20 фиксатора. С задержкой по времени, необходимой для установки рабочего поршня напротив фиксатора и обеспечивающейся с помощью реле времени, воздух подается в штуцер 45 (фиг.6). Далее воздух поступает по трубке 46 в полость 40 (фиг.7) фиксатора. Под действием давления шток фиксатора 20 входит в кольцевую выемку 44 рабочего поршня 29, при этом шарик 23 перемещается из кольцевой канавки 22 в кольцевую канавку 21, тем самым механически фиксируя рабочий поршень 29 внутри корпуса рабочего пневмоцилиндра 26. После этого давление воздуха из полостей 40 и 42 стравливается. Таким образом осуществлено механическое подсоединение органов управления оператора в продольном управлении и управлении общим шагом к органам управления летчика.
Отключение органов управления оператора от системы управления вертолетом производится на земле после посадки вертолета. Для этого при включенном электропитании и наличии давления в пневмосистеме вертолета оператор выставляет педали 11 в приблизительно среднее положение, поворачивает флажок 30 рычага подключения управления 31 на ручке продольно-поперечного управления 6 в обратную сторону, нажимает на рычаг 31 и фиксирует его флажком 30 в нажатом положении. При этом педали 11 фиксируются, микровыключатель, установленный в механизме, фиксирующем педали, срабатывает в обратную сторону, электропитание подается на электромагнитный кран, воздух поступает к штуцерам 32 и 41 (фиг.3, 6) всех четырех раздвижных тяг.
В раздвижных тягах 8 и 12 воздух поступает в полость 35 (фиг.4), далее по каналам 47 и 48 к торцу штока 20 фиксатора. Последний под действием давления воздуха перемещается и выходит из зацепления с рабочим поршнем 17, при этом шарик 23 перемещается из кольцевой канавки 21 в кольцевую канавку 22.
В раздвижных тягах 7 и 10 воздух поступает в полость 42 (фиг.7), далее по каналам 49 и 50 к торцу штока 20 фиксатора. Последний под действием давления воздуха перемещается и выходит из зацепления с рабочим поршнем 29, при этом шарик 23 перемещается из кольцевой канавки 21 в кольцевую канавку 22. Таким образом, происходит расфиксация органов управления оператора от системы управления вертолетом во всех каналах управления.
Далее воздух стравливается из всех раздвижных тяг. После этого оператор может перевести органы управления в походное положение.
Таким образом, наличие пневматически (или гидравлически) управляемого механического фиксатора и его расположение относительно рабочего хода поршня раздвижной тяги обеспечивают фиксацию поршня раздвижной тяги относительно цилиндра в крайнем положении или в среднем положении - в конкретном канале управления в соответствии с системой управления вертолетом. Сохранение механической фиксации поршня раздвижной тяги при повреждении пневматической (или гидравлической) системы повышает надежность летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления и муфта сцепления для него | 2017 |
|
RU2652866C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 1991 |
|
RU2015064C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| Механическая система торможения несущих винтов вертолёта | 2019 |
|
RU2729870C1 |
| КАБИНА ВЕРТОЛЕТА С ТРАВМОБЕЗОПАСНЫМИ ОРГАНАМИ УПРАВЛЕНИЯ | 2004 |
|
RU2265556C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
Изобретение относится к области авиации, в частности к системам управления вертолетом. Система управления вертолетом содержит тяги и качалки основной проводки по каналам управления к органам управления на рабочем месте летчика и тяги проводки к органам управления на рабочем месте оператора. В проводке к органам управления на рабочем месте оператора в каждом канале управления установлена одна пневматически управляемая раздвижная тяга. Раздвижная тяга содержит корпус рабочего пневмоцилиндра, шток с рабочим поршнем и штуцеры для подачи давления в рабочие полости цилиндра. Пневмоцилиндр фиксирует рабочий поршень раздвижной тяги относительно корпуса. Корпус фиксирующего пневмоцилиндра присоединен снаружи радиально к корпусу рабочего пневмоцилиндра раздвижной тяги, а его двусторонний шток одним концом в выдвинутом положении взаимодействует с кольцевой выемкой, выполненной в теле рабочего поршня раздвижной тяги, а другим концом - с механическим фиксатором в виде подпружиненного шарика, для которого в теле двустороннего штока выполнена пара кольцевых канавок для механической фиксации двустороннего штока в выдвинутом и в убранном положении при отсутствии давления в рабочих полостях фиксирующего пневмоцилиндра. Обеспечивается компактное расположение органов управления в кабине оператора в отключенном положении и работоспособность органов управления оператора при повреждении пневмосистемы вертолета. 2 н. и 2 з.п. ф-лы, 7 ил.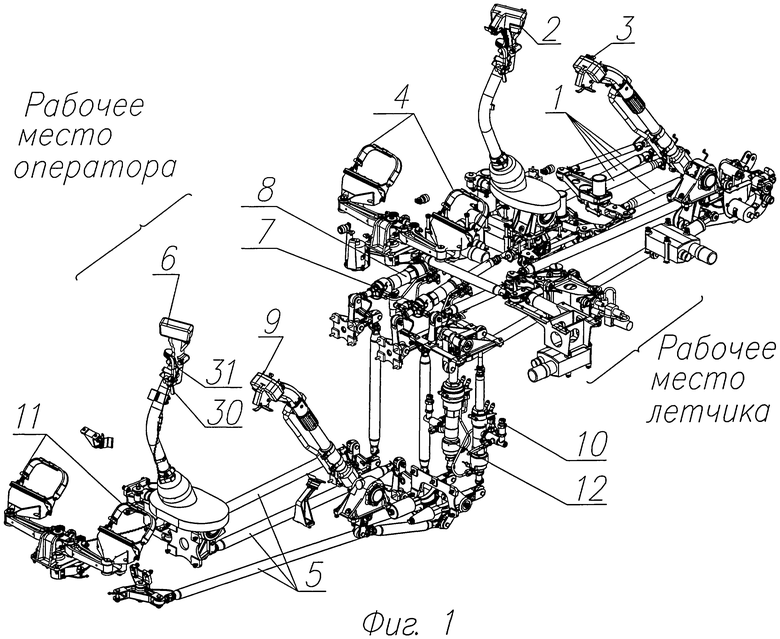
1. Система управления вертолетом, содержащая тяги основной проводки по каналам управления к органам управления на рабочем месте летчика и тяги проводки к органам управления на рабочем месте оператора со средствами присоединения их к основной проводке по сигналу оператора на подачу давления от пневмосистемы, отличающаяся тем, что в проводке к органам управления на рабочем месте оператора в каждом канале управления установлена одна пневматически управляемая раздвижная тяга, шток с поршнем которой соединен с наконечником тяги со стороны связи с основной проводкой, а корпус рабочего пневмоцилиндра - с другим наконечником, при этом раздвижная тяга снабжена средствами для механической фиксации поршня относительно корпуса при крайнем или среднем положении рабочего хода поршня в соответствии с заданным положением органа управления на рабочем месте оператора в соответствующем канале управления при его присоединении к основной проводке с возможностью расфиксации поршня и свободного перемещения штока с поршнем в корпусе при работе основной проводки от органов управления на рабочем месте летчика.
2. Раздвижная тяга проводки системы управления вертолетом, предназначенная для проводки к органам управления оператора и содержащая корпус рабочего пневмоцилиндра, шток с рабочим поршнем и штуцеры для подачи давления в рабочие полости цилиндра, отличающаяся тем, что она снабжена пневмоцилиндром, фиксирующим рабочий поршень раздвижной тяги относительно корпуса, причем корпус фиксирующего пневмоцилиндра присоединен снаружи радиально к корпусу рабочего пневмоцилиндра раздвижной тяги, а его двусторонний шток одним концом в выдвинутом положении взаимодействует с кольцевой выемкой, выполненной в теле рабочего поршня раздвижной тяги, а другим концом - с механическим фиксатором в виде подпружиненного шарика, для которого в теле двустороннего штока выполнена пара кольцевых канавок для механической фиксации двустороннего штока в выдвинутом и в убранном положении при отсутствии давления в рабочих полостях фиксирующего пневмоцилиндра.
3. Раздвижная тяга по п.2, отличающаяся тем, что кольцевая выемка в теле поршня раздвижной тяги расположена напротив штока фиксирующего пневмоцилиндра при крайнем положении рабочего хода поршня раздвижной тяги в соответствии с заданным крайним положением соответствующего органа управления оператора при его подключении к основной проводке.
4. Раздвижная тяга по п.2, отличающаяся тем, что она снабжена дополнительным поршнем, свободно надетым на шток раздвижной тяги, при этом для дополнительного поршня, площадь которого больше площади основного поршня, в корпусе раздвижной тяги выполнен упор, расположенный таким образом, что при положении дополнительного поршня на упоре основной поршень упирается в дополнительный поршень, а кольцевая выемка в теле основного поршня при этом расположена напротив штока фиксирующего пневмоцилиндра при среднем положении рабочего хода поршня раздвижной тяги в соответствии с заданным средним положением соответствующего органа управления оператора при его подключении к основной проводке.
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2000 |
|
RU2178373C1 |
| US 5820071 A, 13.10.1998 | |||
| Выключающаяся ручка управления самолетом | 1930 |
|
SU25404A1 |
| WO 9503212 A1, 02.02.1995 | |||

