Область техники
Изобретение относится к авиационной технике, к проектированию и летным испытаниям несущих винтов, установленных на вертолетах, а именно к способу определения деформаций вращающейся и забустерной частей системы управления вертолета с целью оценки их влияния на углы циклического и общего шага лопастей несущего винта.
Необходимость разработки методики определения деформаций системы управления несущим винтом вертолета была вызвана тем, что при испытаниях самого тяжелого в мире вертолета Ми-26 была выявлена его неустойчивость по скорости полета по продольному каналу. На лопастях несущего винта вертолета Ми-26 применены высоконесущие профили МО и СВ, у которых центр давления существенно смещается назад при увеличении окружного числа Маха Mo и числа Маха на конце наступающей лопасти на азимуте ψ=90°(Мψ=90°). Вследствие этого увеличиваются шарнирные моменты на лопастях на азимуте ψ=90° и пикирующие моменты в канале продольного управления несущим винтом. Поэтому увеличение частоты вращения несущего винта, понижение температуры наружного воздуха и отгиб пластин и закрылков на лопастях вниз могут привести к настолько большим усилиям на бустере продольного управления, что они могут превысить располагаемое максимальное усилие бустера и, в конечном счете, вызвать его заклинивание. Такой факт имел место на вертолете Ми-26 ОП-2 при указанных выше условиях и закончился катастрофой.
Статическая неустойчивость вертолета Ми-26 по продольному каналу особенно существенна на больших скоростях полета [Татуев И.Е., Лосев B.C. Результаты летных исследований по определению характеристик продольной устойчивости и управляемости и нагружения конструкции вертолета Ми-26 в диапазоне скоростей 200-290 км/ч. Сборник трудов 3 форума РосВО и Юрьевских чтений. Издательство МВЗ им. М.Л. Миля, 1998. 10 с.].
Деформация системы управления, вследствие больших нагрузок на таких режимах, приводит к увеличению отрицательного градиента отклонений автомата перекоса по скорости полета.
Система управления несущим винтом вертолета представляет длинную цепь, состоящую из разных по конструкции элементов: рычаги управления углами установки лопастей, вертикальные тяги автомата перекоса, его вращающаяся тарелка и подшипник с обоймами, невращающаяся тарелка, карданная подвеска, тяги, качалки и траверса автомата перекоса, качалки, тяги забустерной части управления.
Совершенно очевидно, что измерения деформаций в полете в таких сложных системах управления, например, тензометрическими методами, в принципе, возможны, но такие методы не дадут приемлемой точности: качалки и рычаги имеют переменные моменты сопротивления изгибу, деформации в карданных подвесках и в подшипниках методами тензометрии или другими известными методами измерить проблематично.
Предлагаемый авторами метод измерения деформаций системы управления несущим винтом, судя по многочисленным публикациям, не имеет аналогов в рассматриваемой области ни в отечественной, ни в зарубежной практике.
Метод основан на измерении углов установки на одной или нескольких лопастях, углов махового движения и качания лопастей, а также перемещений штоков бустеров. Высокая точность измерений обеспечивается с помощью прецизионных датчиков углов поворота, применением высокоточной оптико-электронной аппаратуры при измерении азимутальных углов вращающихся тяг управления, а также обобщения дискретных полетных данных по большому количеству периодов вращения несущего винта.
Как показали исследования, замеренные углы установки лопастей содержат сумму составляющих: от перемещений всех элементов управления, как жесткой цепи управления, так и составляющей, вызванной не только деформациями, но и, как оказалось в процессе исследований, люфтами в многочисленных сочленениях системы управления несущим винтом.
Разность между замеренными углами установки лопастей и перемещениями элементов системы управления как жесткой цепи представляет собой не что иное, как деформацию системы управления под действием внешних нагрузок.
Для оценки влияния деформаций системы продольного управления на статическую балансировку по этому каналу необходимо было определить величину деформации, в том числе в полете на больших скоростях.
В целях сравнения деформаций в продольном канале управления, состоящем из длинной цепочки элементов, были определены также деформации в канале управления общим шагом винта, в котором цепь управления более короткая, а жесткость элементов конструкции выше, чем в канале продольного управления.
Известны работы, выполненные в ОАО «МВЗ им. М.Л. Миля» (Акт №04-2009, 2009 г. автор Рождественский М.Г.) на вертолете Ми-2. В работе представлены результаты обработки измерения шага рулевого винта при выполнении простых и комбинированных разворотов. Была найдена максимальная разница между величинами шага винта при выполнении разворотов и при наземной градуировке. Максимальная разница на режимах при одинаковых отклонениях педалей составила 1,5°.
На вертолете Ми-8 тем же автором были проведены летные исследования на комбинированных разворотах и других режимах полета с минимальными значениями (авторотация) и с максимальными значениями шага рулевого винта режима набора высоты до статического потолка на взлетном режиме работы двигателей (Акты №47-2009 и №48-2009, 2009 г.). Получено, что при максимальном отклонении педалей угол общего шага уменьшается на 1,5°, а при минимальных значениях шага разница между градуировочной зависимостью по штоку рулевого винта и по градуировке составляет по абсолютной величине 0,6°.
Судя по сведениям, полученным из приведенных исследований, деформация в цепи управления шагом рулевого винта происходит главным образом за счет деформации тросовой проводки, длина которой значительна: от корпуса главного редуктора до звездочки, расположенной на редукторе рулевого винта.
В проведенных исследованиях не выявлено влияние усилий или величин шарнирных моментов лопастей на величину деформации силовой части системы управления шагом рулевого винта. Кроме того, схема системы управления шагом рулевого винта значительно проще пространственной и сложной конструкции системы управления несущим винтом, геометрия которой меняется практически на всех эксплуатационных режимах полета.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в определении деформаций в каналах продольного и общего шага несущего винта с целью выявления их влияния на углы установки лопастей несущего винта для предотвращения преждевременного износа контактируемых поверхностей при эксплуатации и обеспечения устойчивого движения вертолета по скорости полета.
Для достижения указанного технического результата в способе определения деформации системы управления несущим винтом вертолета в продольном управлении и управлении общим шагом несущего винта вертолета, содержащем рычаги управления шагом несущего винта, вертикальных тяг автомата перекоса, его вращающейся тарелки и подшипника с обоймами, невращающейся тарелки, ее карданной подвески, качалки, траверсы автомата перекоса, качалки, тяги бустеров забустерной части управления, содержащий определение максимальной разницы между величинами шага винта, измеренными при выполнении летных испытаний и наземной градуировке, устанавливают датчики линейных перемещений с согласующими устройствами, установленными на втулку несущего винта и определяют углы установки лопастей НВ-φл, углы взмаха βл, углы качания лопасти ζл на одной или нескольких лопастях, вычисляют линейные перемещения рукавов втулки несущего винта при различных значениях углов общего шага φо.ш управления НВ, устанавливают оптико-электронный датчик для измерения азимутальных положений лопастей несущих винтов для измерений усилий на бустерах в продольном направлении и управления общим шагом НВ, токосъемник для передачи сигналов с датчиков на вращающейся втулке НВ на неподвижный фюзеляж, согласующее устройство, устанавливают тензорезисторы на качалке продольного управления и траверсе общего шага, индукционные бесконтактные датчики углов поворота устанавливают для измерения в полете углового перемещения рукавов втулки относительно горизонтального, вертикального и осевого шарниров, на бустерах циклического управления, для определения зависимости отклонений углов установки лопасти и углов отклонения автомата перекоса в продольном направлении δв от углов общего шага винта φо.ш, проводят наземную градуировку на не нагруженной системе управления, включая забустерную и вращающиеся (первой и второй) части управления, вычисляют и строят основные следующие градуировочные зависимости:
- выходных сигналов датчиков на бустере продольного управления от углов автомата перекоса δв при различных значениях углов общего шага φо.ш;
- выходных сигналов каналов согласующего устройства СУ ФЧВ от углов махового движения βл, качания ζл и установки лопасти φл;
- углов установки лопасти на азимуте ψпрод=134° от угла наклона автомата перекоса в продольном направлении;
- углов установки лопасти от углов общего шага по указателю шага винта (УШВ) при разных положениях автомата перекоса по продольному каналу;
- углов установки лопасти φл от угла взмаха βл при разных углах ζл для разных значений угла общего шага по УШВ (в качестве примера);
- углов установки лопасти φл от угла качания лопасти ζл при разных углах βл для разных значений угла общего шага по УШВ, по результатам градуировок остальные зависимости строились в качестве примера.
Деформацию системы управления несущим винтом удобно выражать через приращения углов установки лопастей, вызванные податливостью всей цепи управления от корпуса осевого шарнира втулки винта до бустера. Деформация определяется разностью двух углов: замеренного на осевом шарнире втулки угла установки лопасти φл зам., определяемого отклонениями элементов системы управления, маховым движением лопасти, ее перемещением относительно вертикального шарнира для жесткой цепи управления, а также деформациями, люфтами и углами 


значение угла установки лопасти для жесткой системы управления представляется следующим соотношением:

где  - измеренные в полете угловые положения лопасти;
- измеренные в полете угловые положения лопасти;
 - значение компенсатора взмаха лопасти;
- значение компенсатора взмаха лопасти;
 - значение компенсатора качания лопасти;
- значение компенсатора качания лопасти;
 - поправки для углов установки на стояночное положение лопасти и для приведения полетных значении к градуировочным зависимостям;
- поправки для углов установки на стояночное положение лопасти и для приведения полетных значении к градуировочным зависимостям;
ψ - текущее значение угла азимута оси тяги автомата перекоса обследуемой лопасти.
Замеренные углы установки лопастей φл зам. подвергаются гармоническому анализу (Лосев B.C., Щукина В.И. Методика исследования суммирования гармоник обобщенных сил на летательных аппаратах, имеющих воздушные винты с четным числом и неравномерным распределением лопастей по диску. Отчет №46-09-II, ФГУП ЛИИ им. М.М. Громова, 2009. 106 с.).
Определяются средние значения углов φл прод и их первые 
Величины углов установки лопастей, изменяющиеся по первой гармонике и содержащие составляющие за счет перемещений и деформаций элементов продольного управления:

По натурным градуировкам потенциометрических датчиков, используемых для замеров ходов штоков бустеров, которые выражаются через углы отклонения автомата перекоса δв, φо.ш и получены в условиях отсутствия деформаций и по результатам измерений в полете углов поворота элементов втулки винта относительно трех шарниров, а также полученных градуировочных зависимостей определяются углы установки лопастей 
 соответствующие жестким забустерной и вращающейся частям управления,
соответствующие жестким забустерной и вращающейся частям управления,
Тогда по разности между углами установки лопастей, изменяющимися по первой гармонике φI(ψпрод) и величинами  можно определить искомые приращения углов установки лопастей от деформации системы управления в цепи от корпуса осевого шарнира до соответствующего бустера:
можно определить искомые приращения углов установки лопастей от деформации системы управления в цепи от корпуса осевого шарнира до соответствующего бустера:

Для вычисления деформаций по каналу управления общим шагом винта в формуле принимаются:

где βл ср и ζл ср - средние за режим значения углов взмаха и качания лопасти.
Сумма деформаций первого и второго участков по каналу управления общим шагом несущего винта будет равна:

По полученной разнице Δφл.о.ш устанавливают величину деформации от забустерной части системы управления до втулки несущего винта. Оценивают разницу между допустимым отклонением ручки управления по продольному каналу и полученным в полете, а затем регулируют перемещение ручки управления для получения устойчивого движения вертолета по скорости полета.
Предлагаемый способ поясняется следующими фигурами:
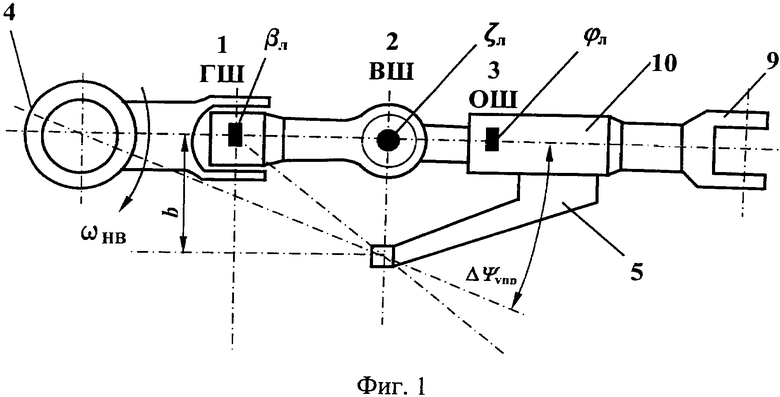
На фиг.1 показана схема установки датчиков для измерения угловых перемещений лопасти несущего винта, где:
1 - датчик угла махового движения лопасти несущего винта βл;
2 - датчик угла перемещения лопасти ζл несущего винта;
3 - датчик угла установки лопасти φл несущего винта;
4 - вал несущего винта;
5 - рычаг управления углом установки лопасти;
ВШ - вертикальный шарнир несущего винта;
ОШ - осевой шарнир несущего винта;
9 - (гребенка присоединения) лопасти несущего винта (к втулке).
На фиг.2 показана схема автомата перекоса несущего винта:
6 - рычаг управления углом установки лопасти;
7 - горизонтальная тяга, подсоединенная к бустеру системы продольного управления несущего винта;
8 - бустеры продольного управления и управления общим шагом несущего винта;
9 - лопасть несущего винта;
10 - корпус осевого шарнира;
11 - тяга перемещения датчика МУ-615;
12 - вертикальная тяга автомата перекоса;
13 - опора вертикальной тяги автомата перекоса;
14 - ползун автомата перекоса;
15 - вращающееся кольцо автомата перекоса;
16 - основание автомата перекоса;
17 - горизонтальная тяга к бустеру;
18 - потенциометрический датчик угловых перемещений Му-615;
31 - траверса общего шага.
На фиг.3 показана функциональная схема для измерения βл, ζл, φл и усилий в системе управления несущим винтом:
19 - токосъемник ТС-19;
20 - бортовой твердотельный накопитель;
21 - оптико-электронный усилитель ОФАМ-002;
22 - вращающаяся часть - втулка несущего винта;
23 - блок согласующих усилителей потенциометрических датчиков углов отклонения автомата перекоса в продольном направлении δв, и в управлении общим шагом δош - БСУ 96ПТ;
24 - блок тензоусилителей для тензорезисторов БСУ 16ТМ, установленных на качалке продольного направления и траверсе общего шага;
25 - блок согласующих усилителей фазочастотного выпрямителя (СУ ФЧВ) для индукционных датчиков;
26 - тензомодуль ТМ2-4;
27 - оптико-электронный датчик ОФАМ-002;
28 - бортовой цифроаналоговый преобразователь БЦП.01;
29 - автомат перекоса;
30 - вращающееся кольцо датчика ОФАМ-002.
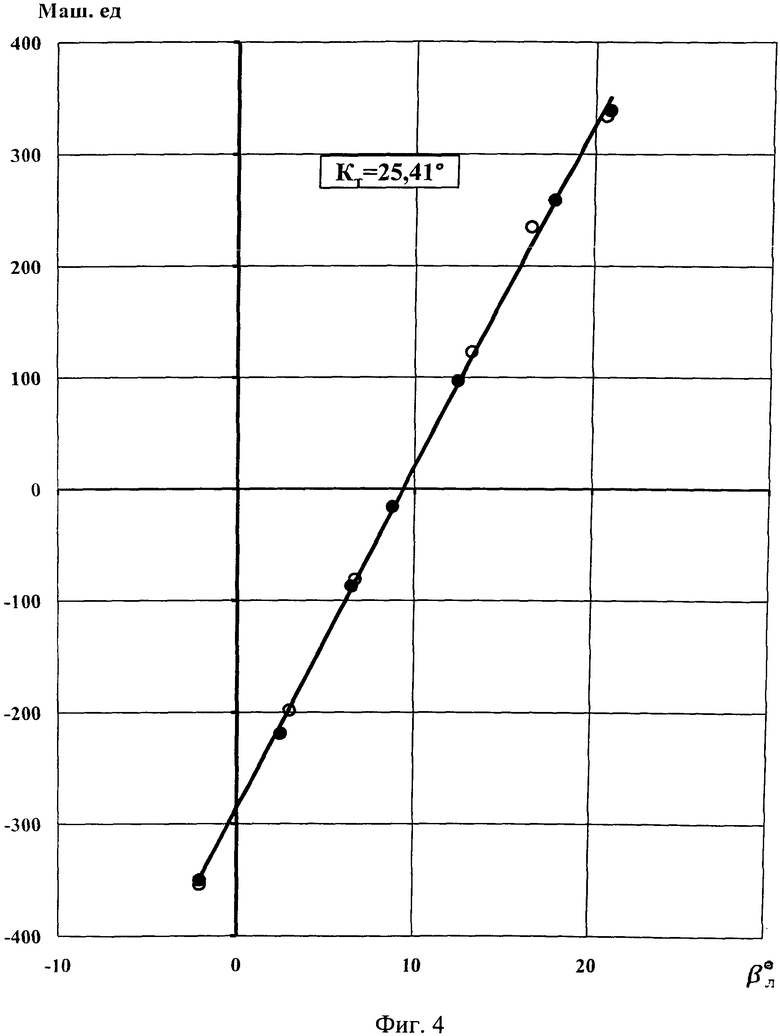
На фиг.4 показаны зависимости в машинных единицах углов махового движения лопастей βл несущего винта и градуировочный коэффициент Кт.
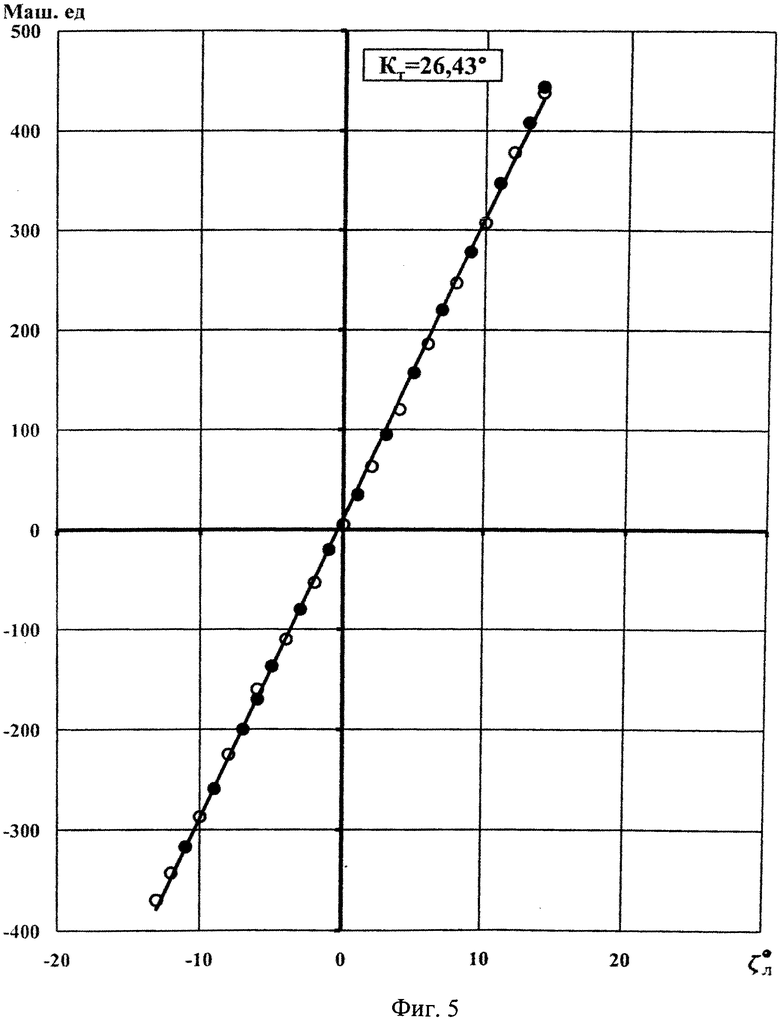
На фиг.5 показаны зависимости в машинных единицах углов качания лопастей ζл несущего винта и градуировочный коэффициент Кт.
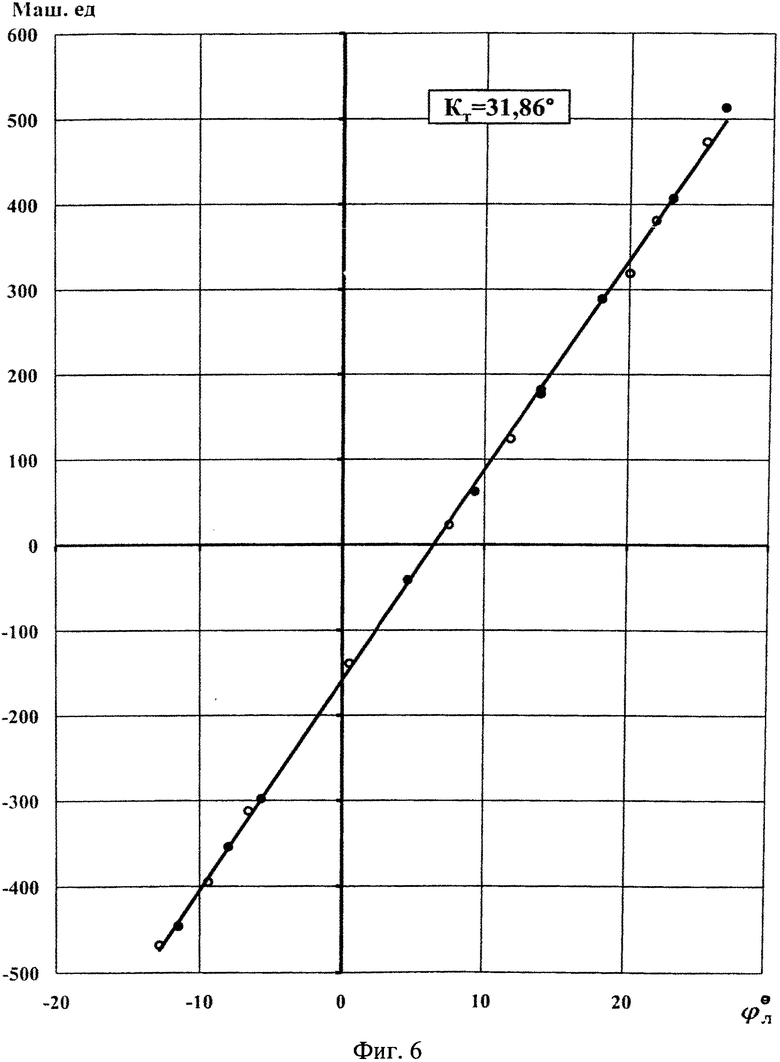
На фиг.6 приведены зависимости в машинных единицах углов установки лопастей φл несущего винта и градуировочный коэффициент Кт.
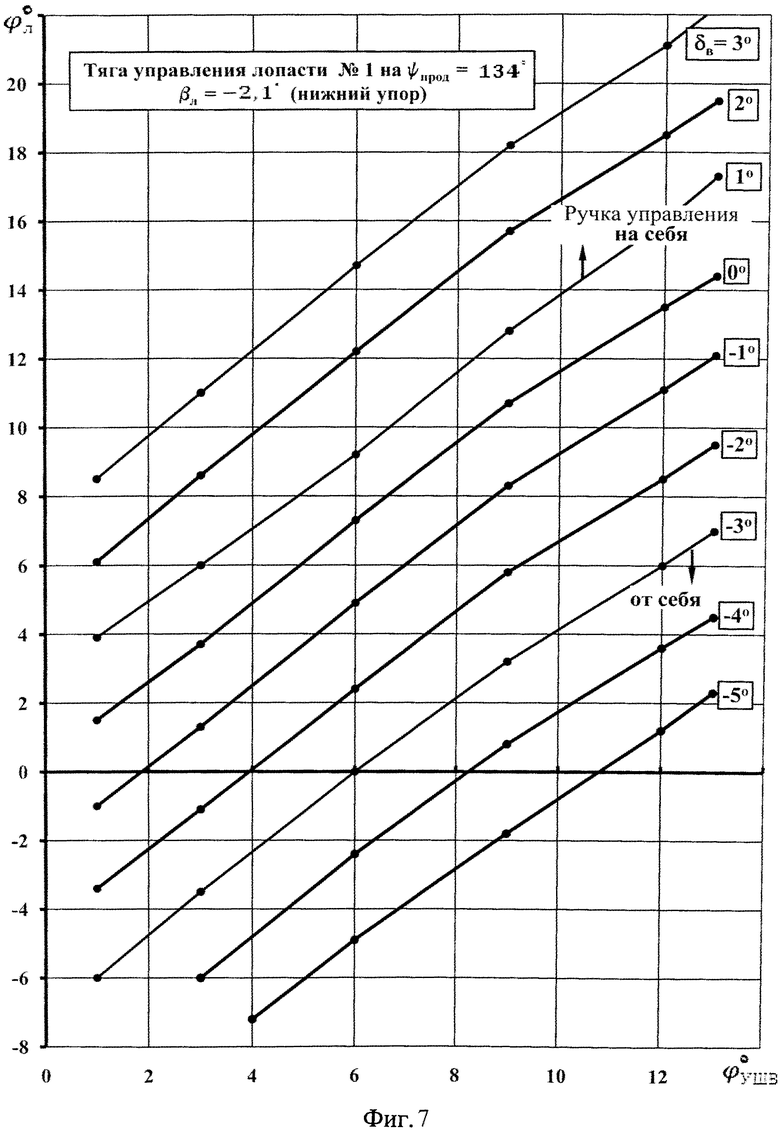
На фиг.7 показаны зависимости углов установки лопасти несущего винта φл от углов общего шага несущего винта φУШВ при разных положениях автомата перекоса в продольном направлении δВ и определены для каждой зависимости градуировочные коэффициенты (Кт) при изменении угла общего шага и разных отклонениях автомата перекоса в продольном направлении, соответствующих перемещениям ручки управления НВ на себя и от себя.
На фиг.8 показаны зависимости углов установки лопасти несущего винта φл на азимуте ψпрод=134° от угла наклона автомата перекоса в продольном направлении при разных углах φУШВ и определены для каждой зависимости градуировочные коэффициенты (Кт) при прямом и обратном ходе ручки общего шага.
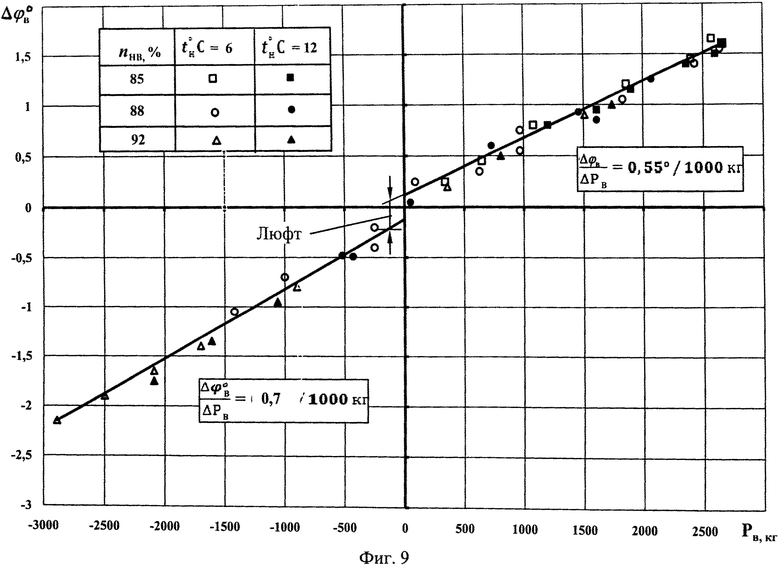
На фиг.9 приведены зависимости деформации вращающейся и забустерной частей продольного канала управления несущим винтом от статической составляющей усилий на штоке бустера при разных частотах вращения nHB и температурах наружного воздуха tH°C.
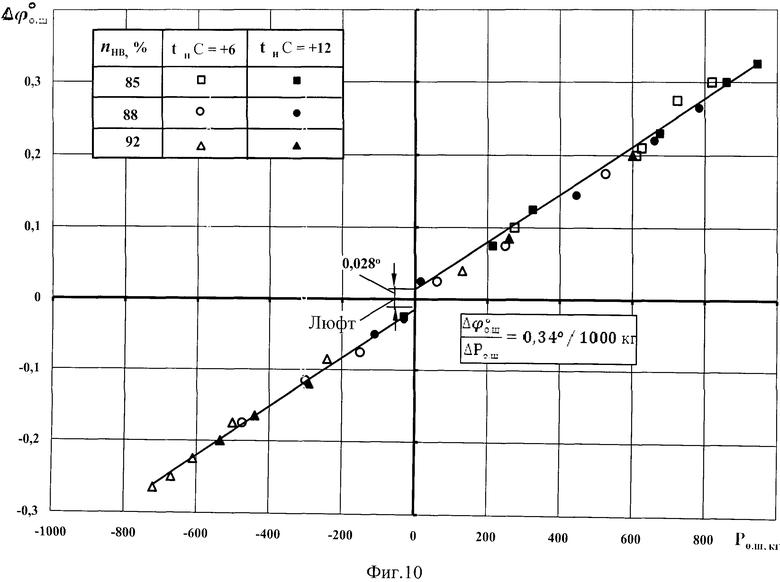
На фиг.10 приведены зависимости деформации вращающейся и забустерной частей общего шага управления несущим винтом от статической составляющей усилий на штоке бустера при разных частотах вращения nHB и температурах наружного воздуха tH°C.
Предлагаемый способ поясняется чертежом фиг.3, на котором изображена функциональная схема для измерения βл, ζл, φл и усилий в системе управления несущим винтом. На схеме показаны соединенные с твердотельным накопителем (20) через токосъемник (19), через блок согласующих усилителей СУ-ФЧВ (25) и бортовой цифроаналоговый преобразователь БЦП.01 (28) индукционные бесконтактные датчики углов поворота, установленные на вращающейся части несущего винта (22), а также соединенные с (20) через блок согласующего усилителя БСУ 96 ПТ (23) и блок БЦП.01 (28) - потенциометрические датчики угловых перемещений Му-615;
- через ОФАМ-002 (21) и блок БЦП.01 (28) двухканальный оптико-электронный отметчик азимута (27);
- через тензомодуль ТМ2-4 (26) и блок тензоусилителей БСУ 16 ТМ тензорезисторы, установленные на качалке, подсоединенной к бустеру (8) с помощью горизонтальной тяги системы продольного управления несущего винта, и на траверсе (31) управления общим шагом, опирающейся на опору невращающейся тарелки автомата перекоса, для измерения усилий на бустерах (8) продольного управления и управления общим шагом несущего винта.
Способ осуществляется следующим образом.
Устанавливают индукционные бесконтактные датчики (1, 2, 3) углов поворота 45Д-20-1 на втулку несущего винта (фиг.1) и определяют углы установки лопастей несущего винта - φл, углы взмаха βл, углы качания лопасти ζл на одной или нескольких лопастях вычисляют линейные и угловые перемещения рукавов втулки относительно горизонтального и вертикального шарниров и углов установки лопастей при различных значениях углов общего шага φо.ш управления несущего винта (фиг.1). Система управления НВ содержит рычаги управления шагом несущего винта, вертикальные тяги автомата перекоса (12), вращающуюся тарелку автомата перекоса (15) и подшипники с обоймами, невращающуюся тарелку, карданную подвеску и траверсу (31) автомата перекоса, качалки, бустеры (8) забустерной части управления (фиг.2).
Для передачи этих сигналов с одного или двух рукавов вращающейся втулки несущего винта используются щеточные токосъемники (19) ТС-19. Сигналы с датчиков указанных углов поворота через блоки согласующих усилителей СУ ФЧВ и блок БЦП.01 передаются на твердотельные накопители типа ТН 64 АЦМ. С целью обработки записей углов отклонения рукавов втулки несущего винта используется оптико-электронный двухканальный датчик (27) для записи отметок азимутального положения лопастей: один из каналов служит для отметки 64 или 128 положений лопастей по азимуту, а второй - для идентификации начала отсчета периода вращения несущего винта. Сигналы с этого двухканального отметчика азимута передаются в согласующее устройство ОФАМ-002, в котором они преобразуются в прямоугольные импульсы с величиной напряжения 2 вольта (фиг.3).
В невращающейся части системы управления несущим винтом с помощью потенциометрических датчиков МУ-615 измеряют углы поворота автомата перекоса по продольному δв и по каналу общего шага несущего винта. Сигналы с потенциометрических датчиков подаются на блок согласующих усилителей БСУ96ПТ и далее на твердотельные накопители ТН 64 АЦМ (фиг.3).
Для измерения усилий в системе управления несущим винтом на качалках продольного управления и траверсе (31) управления общим шагом наклеиваются тензорезисторы для измерения усилий на бустерах циклического управления РВ и управления общим шагом несущего винта Ро.ш, которые соединены в тензомосты. Сигналы с тензомостов через тензомодули предварительного усиления ТМ2-4 подаются на блок тензоусилителей БСУ 16ТМ, а затем через цифровой блок БЦП.01 регистрируются на твердотельный накопитель типа ТН 64 АЦМ (фиг.3). В результате обработки градуировочных зависимостей были получены результаты, показанные на следующих фигурах:
- на фиг.4 - зависимости в машинных единицах углов махового движения лопастей βл несущего винта;
- на фиг.5 - зависимости в машинных единицах углов качания лопастей ζл несущего винта;
- на фиг.6 - зависимости в машинных единицах углов установки лопастей φл несущего винта;
- на фиг.7 показаны зависимости углов установки лопасти несущего винта φл от углов общего шага несущего винта φУШВ при разных положениях автомата перекоса в продольном направлении δВ и определены для каждой зависимости градуировочные коэффициенты (Кт) при изменении угла общего шага и разных отклонениях автомата перекоса в продольном направлении, соответствующих перемещениям ручки управления НВ на себя и от себя;
- на фиг.8 показаны зависимости углов установки лопасти несущего винта φл на азимуте ψпрод=134° от угла наклона автомата перекоса в продольном направлении при разных углах φУШВ и определены для каждой зависимости градуировочные коэффициенты (Кт) при прямом и обратном ходе ручки общего шага.
Пример
Летные исследования по отработке методики определения деформаций вращающейся и забустерной частей системы управления несущим винтом были выполнены на вертолете Ми-26 на режимах горизонтального полета в диапазоне скоростей Vпр=195…295 км/ч, на высотах Нр=500…700 м, со средним полетным весом Gп=49,5 т, при частотах вращения несущего винта nн в=85, 88 и 92% и температурах наружного воздуха tн=+6 и +12°C.
Записи углов отклонения лопастей βл, ζл и φл были усреднены для каждого значения азимута на всех периодах вращения несущего винта с продолжительностью режимов до 20…30 с (1). Таким образом, на каждом режиме число обработанных периодов составляло от 40 до 60. Каждый период вращения разбивался на 64 части через Δψ=5,625°. Выполнен обобщенный гармонический анализ записей углов поворота лопастей относительно трех шарниров для определения деформаций системы управления несущим винтом по формулам (2), (3), (4).
Для обобщения данных, полученных в результате обработки полетной информации с целью оценки влияния деформаций вращающейся и забустерной частей системы управления на углы установки лопастей, были определены зависимости приращений углов установки лопастей от усилий на бустерах продольного управления и управления общим шагом несущего винта, выполненные в соответствии с формулой (5). Значения деформации приведены на фиг.9 и 10, из которых следует также, что деформации в цепях управления линейно зависят от усилий на бустерах. Необходимо обратить внимание на то, что градиенты 
В канале общего шага управления (следует сравнить данные на фиг.9 и 10) градиенты приращений углов установки по усилиям на бустере значительно меньше, чем в канале продольного управления. Это связано с тем, что цепь управления общим шагом значительно короче, чем цепь продольного управления, а траверса (31) автомата перекоса, передающая усилия от ползуна (14) автомата перекоса к бустеру (8), имеет большую жесткость на изгиб.
Градиенты приращений углов установки лопастей по усилию на бустере продольного управления составляют 0,55° при положительных усилиях и 0,7° при отрицательных усилиях, а в канале общего шага практически не зависят от знака нагрузки и составляют 0,34° на 1000 кг. Увеличение частоты вращения несущего винта, понижение температуры наружного воздуха и отгиб пластин и закрылков на лопастях вниз могут привести к настолько большим усилиям на бустере продольного управления, что они могут превысить располагаемое максимальное усилие бустера и, в конечном счете, вызвать его заклинивание.
При переходе нагрузок в цепях продольного управления и управления общим шагом несущего винта из отрицательной области в положительную выявляются люфты в этих каналах управления, которые соответствуют скачкообразному изменению угла установки лопастей соответственно на 0,24° и 0,028°. Меньшее значение люфта в управлении общим шагом можно объяснить тем, что число сочленений в этом канале меньше, чем в цепи продольного управления.
Необходимо отметить тот факт, что на вертолете Ми-26 люфты в системе управления появляются при ряде сочетаний частот вращения винта и температур наружного воздуха в области рабочих режимов полета (фиг.9 и 10). В системе продольного управления люфт возникает при тех условиях полета, когда число Маха на концах лопастей несущего винта на азимуте ψ=90° становится равным МΨ=90°≈0,89…0,895.
Люфты в системе управления нежелательны, т.к. они могут привести к преждевременному износу контактируемых поверхностей и дальнейшему износу сочленений при эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ КОРПУСА ОБЪЕКТА ПРЕИМУЩЕСТВЕННО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2693750C1 |
| Система привода закрылков летательного аппарата | 2022 |
|
RU2799167C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2016 |
|
RU2619679C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ КОРПУСА ОБЪЕКТА ПРЕИМУЩЕСТВЕННО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691776C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| КОНВЕРТОПЛАН И СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ | 2018 |
|
RU2736668C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |


Изобретение относится к авиационной технике, в частности к проектированию и летным испытаниям несущих винтов, установленных на вертолетах. Способ определения деформации системы управления несущим винтом вертолета в продольном управлении и управлении общим шагом несущего винта вертолета включает определение максимальной разницы между величинами шага винта, измеренными при выполнении летных испытаний и наземной градуировке. Для этого определяют углы установки лопастей НВ-φл, углы взмаха βл, углы качания лопасти ζл на одной или нескольких лопастях, вычисляют линейные перемещения рукавов втулки несущего винта при различных значениях углов общего шага φо.ш управления НВ. Измеряют усилия на бустерах, определяют зависимости отклонений углов установки лопасти и углов отклонения автомата перекоса в продольном направлении δв от шага винта φушв, проводят наземную градуировку на ненагруженной системе управления, включая забустерную и вращающиеся части управления. По полученной разнице Δφл о.ш устанавливают величину деформации от забустерной части системы управления до втулки несущего винта. Оценивают разницу между допустимым отклонением ручки управления по продольному каналу и полученным в полете, а затем регулируют перемещение ручки управления для получения устойчивого движения вертолета по скорости полета. Достигается повышение точности оценки деформаций в системе продольного управления. 10 ил.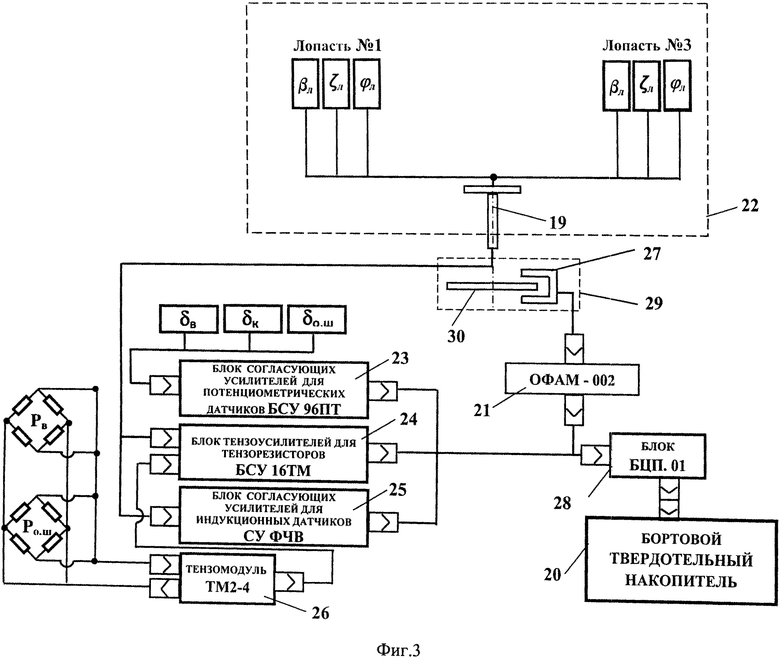
Способ определения деформации в системе продольного управления и управления общим шагом несущего винта (НВ) вертолета, состоящей из рычагов управления углами установки лопастей, вертикальных тяг автомата перекоса, его вращающейся тарелки и подшипника с обоймами, не вращающейся тарелки, карданной подвески невращающихся тарелок автомата перекоса, качалки, траверсы автомата перекоса, качалки, тяги бустера забустерной части управления, содержащий определение максимальной разницы между величинами шага винта, измеренными при выполнении летных испытаний и наземной градуировке, отличающийся тем, что устанавливают датчики угловых перемещений с согласующими устройствами на втулку несущего винта и определяют углы установки лопастей НВ - φл, углы взмаха βл, углы качания лопасти ζл на одной или нескольких лопастях, вычисляют линейные и угловые перемещения рукавов втулки несущего винта при различных значениях углов общего шага φо.ш управления НВ, устанавливают оптико-электронный датчик для измерения азимутальных положений лопастей несущих винтов для измерения усилий на бустерах в продольном направлении в управлении общим шагом НВ, токосъемник для передачи сигналов с датчиков на вращающейся втулке НВ на неподвижный фюзеляж в согласующее устройство, устанавливают тензорезисторы на качалке продольного направления и траверсе общего шага, индукционные бесконтактные датчики углов поворота устанавливают для измерения в полете углового перемещения рукавов втулки относительно вертикального шарнира и управления общим шагом несущего винта вертолета, на бустере циклического управления, на автомате перекоса для определения зависимости отклонений углов установки лопасти и углов отклонения автомата перекоса в продольном направлении δв от углов шага винта φо.ш, проводят наземную градуировку на ненагруженной системе управления, включая забустерную и вращающиеся (первую и вторую) части управления, вычисляют и строят следующие основные градуировочные зависимости:
- выходных сигналов датчиков на бустерах циклического управления от углов автомата перекоса δв при различных значениях углов общего шага φо.ш;
- выходных сигналов каналов согласующего устройства фазочастотного выпрямителя (СУ ФЧВ) от углов махового движения, качания и установки лопасти;
- углов установки лопасти на азимуте ψпрод=134° от угла наклона автомата перекоса в продольном направлении;
- углов установки лопасти от углов общего шага по указателю шага винта (УШВ) при разных положениях автомата перекоса по продольному каналу;
- углов установки лопасти φл от угла взмаха βл при разных углах ζл для разных значений угла общего шага по УШВ;
- углов установки лопасти φл от угла качания лопасти ζл при разных углах βл для разных значений угла общего шага по УШВ, по результатам градуировок строились зависимости:
- значений компенсатора взмаха лопасти æβ от углов φУШВ при различных углах качания лопасти;
- значений компенсатора качания от угла махового движения лопасти æζ при различных углах по УШВ;
- значений компенсатора взмаха лопасти от угла качания φл при нескольких значениях φУШВ;
- зависимости отклонений углов установки лопасти и углов отклонения автомата перекоса в продольном направлении от углов φУШВ;
в области рабочих режимов полета оценку влияния деформаций вращающейся и забустерной частей системы управления на углы установки лопастей определяют по зависимости приращений углов установки лопастей от усилий на бустере продольного управления и управления общим шагом несущего винта, строят зависимости βл, ζл, φл от усилий Рв, Рош, полученные на бустерах продольного управления и управления общим шагом НВ, рассчитывают градиенты изменения угла, для этого в системе продольного управления НВ через приращения углов установки лопастей, вызванные податливостью всей цепи управления от корпуса осевого шарнира втулки винта до бустера, определяют деформацию системы управления несущим винтом, для этого деформацию рассчитывают по разности двух углов: замеренного на осевом шарнире втулки угла установки лопасти φлзам., определяемого отклонениями элементов системы управления, маховым движением лопасти, ее перемещением относительно вертикального шарнира для жесткой цепи управления, а также деформациями, определяемыми люфтами и углом 


где мгновенное значение угла установки лопасти для жесткой системы управления представляется следующим соотношением:
 ,
,
где φл(ψ,δц,φо.ш), βл(ψ), ζл(ψ) - измеренные в полете угловые положения лопасти;
-  - значение компенсатора взмаха лопасти;
- значение компенсатора взмаха лопасти;
-  - значение компенсатора качания лопасти;
- значение компенсатора качания лопасти;
- Δφл(βл), Δφл(ζл) - поправки для углов установки на стояночное положение лопасти и для приведения полетных значений к градуировочным зависимостям;
- ψ - текущее значение угла азимута оси тяги автомата перекоса обследуемой лопасти.
- замеренные углы установки лопастей φл зам. подвергаются гармоническому анализу;
- определяются средние значения углов φл прод, первые 
- величины углов установки лопастей, изменяющиеся по первой гармонике, их средние значения углов φло и содержащие составляющие за счет перемещений и деформаций элементов продольного управления:

- по натурным градуировкам потенциометрических датчиков, используемых для замеров ходов штоков бустеров, которые выражаются через углы отклонения автомата перекоса δв, φо.ш и получены в условиях отсутствия деформаций, результатам измерений в полете углов поворота элементов втулки винта относительно трех шарниров, а также полученных градуировочных зависимостей определяются углы установки лопастей, соответствующие 

- тогда по разности между углами установки лопастей, изменяющимися по первой гармонике φI(ψпрод) и величинами 

для вычисления деформаций по каналу управления общим шагом винта в формуле принимаются:

при βл ср, æζл(ψ)=æζл при ζл ср,
где βл ср и ζл ср - средние за режим значения углов взмаха и качания лопасти, сумма деформаций первого и второго участков по каналу управления общим шагом несущего винта будет равна:

по полученной разнице Δφл о.ш устанавливают величину деформации от забустерной части системы управления до втулки несущего винта, оценивают разницу между допустимым отклонением ручки управления по продольному каналу и полученным в полете, а затем регулируют перемещением ручки управления для получения устойчивого движения вертолета по скорости полета.
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АГРЕГАТОВ ВЕРТОЛЕТА | 2002 |
|
RU2230006C2 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АГРЕГАТОВ НЕСУЩЕЙ СИСТЕМЫ ВЕРТОЛЕТА ДЛЯ ПРОДЛЕНИЯ РЕСУРСА | 2001 |
|
RU2181334C1 |
| KR 1372809 B1, 12.03.2014 | |||
| Этилендиамин- , -диуксусная- диметилфосфоновая кислота,являющаяся органическим реактивом для определения катионов металлов | 1973 |
|
SU490805A1 |

