Изобретение относится к системам управления нестационарным объектом с переменным запаздыванием, а именно к системам идентификации переменных параметров.
Целью изобретения является повышение точности и запаса устойчивости идентификатора, а также расширение области применения для объектов управления с переменными параметрами и запаздыванием.
Цель достигается введением в систему блоков дифференциаторов, блоков усилителей, блока усилителей с переменным коэффициентом усиления, блока усилителей с переменным запаздыванием, блока умножителей.
Суть изобретения в следующем.
Дифференциальное уравнение нестационарного объекта управления с запаздыванием (с переменным запаздыванием по выходу) имеет вид = a(t)X +b(t)U +c(t)X(t-τ), τ = var (1)
= a(t)X +b(t)U +c(t)X(t-τ), τ = var (1)
Разлагают величину Х (t - τ) в ряд Тейлора
X(t-τ)= X(t) +  (-τ) +
(-τ) +  (-τ)2 +...+
(-τ)2 +...+  (-τ)n (2)
(-τ)n (2)
n = 1,2,..., и ограничиваются, двумя членами разложения
X(t-τ) = X(t) -  (t)τ(t) (3)
(t)τ(t) (3)
Подставляют выражения (3) в уравнение (1): = a(t)X + b(t)U + c(t)[X-
= a(t)X + b(t)U + c(t)[X- (t)] (4) или в эквивалентном виде
(t)] (4) или в эквивалентном виде = [a(t) + c(t)]X + b(t)U -c(t)τ(t)
= [a(t) + c(t)]X + b(t)U -c(t)τ(t) (5)
(5)
Представляют уравнение (5) в виде = [a°(t) + c°(t)]X + b°(t)U - c°(t)τ°(t)
= [a°(t) + c°(t)]X + b°(t)U - c°(t)τ°(t) +
+
+ [Δa°(t) + Δc°(t)]X + Δb°(t)U - Δc°(t)τ°(t) (6)
(6)
Обозначают через ▿ = ▿н :
 где выполняются равенства
где выполняются равенства
 (8)
(8)
Выбирают функцию Ляпунова в виде
V = κ ▿▿н + 0,5 (Δa + Δb
+ Δb +
+  + Δc
+ Δc ) (9)
) (9)
κ = const > 0 и находят ее производную = κ (
= κ ( +
+  )+ Δa
)+ Δa + Δb
+ Δb +
+  + Δc
+ Δc (10)
(10)
Определяют из уравнения (7) значение  (t):
(t): = Δ˙a°X + Δa
= Δ˙a°X + Δa + Δ˙c°X + Δc
+ Δ˙c°X + Δc + Δ˙b°U + Δb
+ Δ˙b°U + Δb -
-  -
-  (11) и подставляют ▿н и
(11) и подставляют ▿н и  в выражение (10):
в выражение (10): =
=  [(Δa°+ Δc°)X + Δb°U-
[(Δa°+ Δc°)X + Δb°U-  ] + κ▿[Δ˙a°X + Δa
] + κ▿[Δ˙a°X + Δa +
+
+ Δ˙c°X + Δc + Δ˙b°U + Δb
+ Δ˙b°U + Δb -
-  -
-  ] + (12)
] + (12)
+ Δa°·Δ˙a° + Δc°·Δ˙c°+ Δb°·Δ˙b°+ Δτ°·Δ˙τ°.
Переписывают выражение (12) в эквивалентном виде: = κΔa°
= κΔa° + κΔb°
+ κΔb° + κΔc°
+ κΔc° -
-
- κΔτ° + κΔ˙a°▿X + κΔ˙c°▿X +κΔ˙b°▿U - (13)
+ κΔ˙a°▿X + κΔ˙c°▿X +κΔ˙b°▿U - (13)
-  + Δa°·Δ˙a° + Δc°·Δ˙c° + Δb°·Δ˙b° + Δτ°·Δ˙τ°
+ Δa°·Δ˙a° + Δc°·Δ˙c° + Δb°·Δ˙b° + Δτ°·Δ˙τ°
Из выражения (13) для обеспечения неположительности производной функции Ляпунова, а значит, и для устойчивости системы идентификации достаточно выполнение условий




 (14)
(14)
2κo= κ
Условия (14) выполняются, если выбрать следующие составляющие компонент адаптации параметров:


 (15)
(15)
Ввиду того, что для  ≅ 0 0 необходимо выполнение условий (14) одновременно, то очевидно, что в законе настройки необходимы все составляющие из выражений (15), поэтому алгоритм адаптации параметров записывают в виде параметрических приращений
≅ 0 0 необходимо выполнение условий (14) одновременно, то очевидно, что в законе настройки необходимы все составляющие из выражений (15), поэтому алгоритм адаптации параметров записывают в виде параметрических приращений




 (16)
(16)
Из выражения (16) видно, что ▿(t) = 0 есть положение устойчивого равновесия, так как все параметрические управления обращаются одновременно в ноль.
Необходимо сделать важное замечание. Найденные параметрические управления не являются тонущими параметрическими отклонениями Δ аo(t), Δ co(t), Δ τo (t) и Δ bo(t), а алгоритмы адаптации требуются для устойчивости адаптивной системы управления.
Уравнения адаптации параметров записывают в виде
a(t) = a°(t) +Δa
c(t) = c°(t) +Δc
b(t) = b°(t) +Δb
c(t)τ(t) = c°(t)τ°(t) + Δb

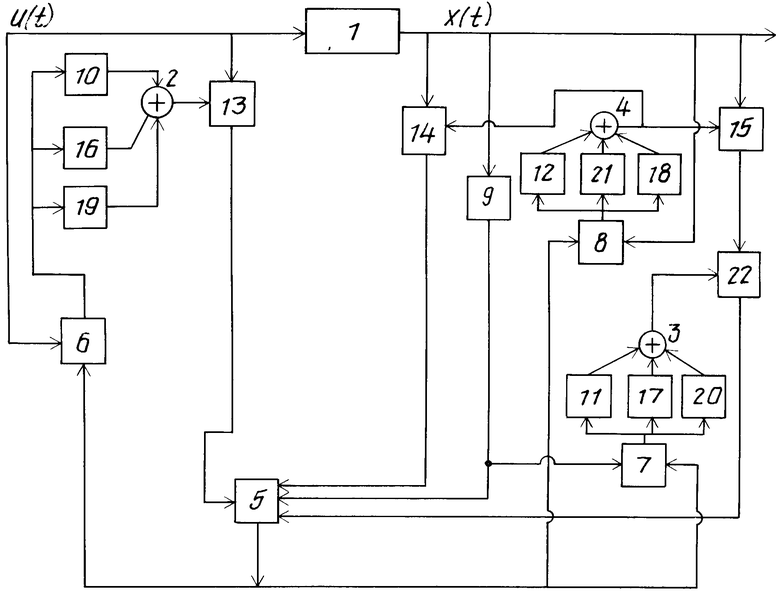
На чертеже представлена система идентификации параметров нестационарного объекта управления с переменным запаздыванием. Система содержит объект 1 управления, блоки 2-5 сумматоров, блоки 6-8 умножителей, блоки 9-12 дифференциаторов, блоки 14-15 усилителей с переменным коэффициентом усиления, блоки 16-18 интеграторов, блоки 19-21 усилителей и блок 22 с переменным запаздыванием.
Работает система следующим образом.
На вход системы идентификации поступает сигнал управления U(t), который присутствует на входах объекта 1 управления и блока 13 усилителей с переменным коэффициентом усиления. Выходной сигнал последнего поступает на вход блока 5 сумматоров, в котором формируется сигнал ▿(t). Сигналы U(t) и ▿(t), поступающие на входы блока 6 умножителей, перемножаются и преобразуются в ПИД-регуляторе, составленном из блоков 10, 16, 19 и 2. На выходе блока 2 образуется сигнал параметрической настройки параметров блока 13, на вход настройки которого и поступает сигнал с выхода блока 2. Таким образом, производится реализация алгоритмов адаптации параметров блока матрицы управления b(t) блока 13 по второму уравнению выражения (16). Аналогично реализуются остальные уравнения (16). Ввиду того, что алгоритмы адаптации для Δ ао(t) и Δ со(t) совпадают, реализация их возможна одними и теми же элементами функциональной схемы: блоками 8, 12, 18, 21 и 4, а выход сигнала настройки - выход блока 4 поступает одновременно на входы настройки параметров блоков 14 и 15. Работа этих блоков аналогична работе контура настройки параметров блока 13. Контур настройки времени запаздывания имеет аналогичную структуру контуров адаптации с той лишь разницей, что в блоке 7 умножителей сигнал ▿ (t) перемножается с сигналом Х(t). Таким образом, одновременной подстройкой параметров системы - параметров блоков 13, 14, 15 и 22 обеспечивается стремление ▿(t) 0 на основе реализации принципа отрицательной обратной связи по параметрам (8). Ввиду того, что сигнал ▿ (t) ≠ 0 означает наличие отклонений параметров объекта от параметров настраиваемых блоков 13, 14, 15 и 22, при ▿ (t)_→ 0 параметры этих блоков близки к параметрам объекта, а при ▿ (t) = 0 равны последним.
0 на основе реализации принципа отрицательной обратной связи по параметрам (8). Ввиду того, что сигнал ▿ (t) ≠ 0 означает наличие отклонений параметров объекта от параметров настраиваемых блоков 13, 14, 15 и 22, при ▿ (t)_→ 0 параметры этих блоков близки к параметрам объекта, а при ▿ (t) = 0 равны последним.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Адаптивная система управления | 1991 |
|
SU1807447A1 |
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| Квазиоптимальная по быстродействию система управления | 1981 |
|
SU987575A1 |
Изобретение относится к идентификаторам параметров нестационарного объекта с переменным запаздыванием. Цель изобретения - повышение точности, устойчивости и расширения области применения - которая достигается тем, что система дополнительно содержит второй, третий и четвертый блоки сумматоров, четыре блока дифференциаторов, три блока усилителей, три блока интеграторов, третий блок усилителей, третий блок усилителей с переменным коэффициентом передачи и блок с переменным запаздыванием. 1 ил.
СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ, содержащая первый блок сумматоров, первая и вторая группы входов которого соединены с выходами первого и второго блоков усилителей с переменным коэффициентом усиления, информационные входы первого блока усилителей с переменным коэффициентом усиления являются входами системы и подключены к первой группе входов первого блока умножителей, выходы которого подключены к входам первого блока интеграторов, а вторая группа входов соединена с первой группой входов второго блока умножителей, подключенного выходами к входам второго блока интеграторов, и объект управления, отличающаяся тем, что в нее введены второй - четвертый блоки сумматоров, четыре блока дифференциаторов, три блока усилителей, третий блок интеграторов, третий блок умножителей, третий блок усилителей с переменным коэффициентом передачи и блок с переменным запаздыванием, входы системы соединены с входами объекта управления, выходы которого являются выходами системы, соединенными с информационными входами второго блока усилителей с переменным коэффициентом усиления и через первый блок дифференциаторов подключены к третьей группе входов первого блока сумматоров и второй группе входов второго блока умножителей, выходы объекта управления подключены к первой группе входов третьего блока умножителей и через последовательно включенные третий блок усилителей с переменным коэффициентом усиления и блок с переменным запаздыванием соединены с четвертой группой входов первого блока сумматоров, выходы которого подключены к вторым группам входов первого и третьего блоков умножителей, выходы первого блока умножителей через первый блок усилителей и второй блок дифференциаторов подключены к первой и второй группам входов второго блока сумматоров, третья группа входов которого подключена к выходу первого блока интеграторов, а выходы соединены с входами настройки первого блока усилителей с переменным коэффициентом усиления, выходы второго блока умножителей через второй блок усилителей и третий блок дифференциаторов подключены к первой и второй группам входов третьего блока сумматоров, третья группа входов которого подключена к выходам второго блока интеграторов, а выходы соединены с входами настройки блока с переменным запаздыванием, выходы третьего блока умножителей через третий блок усилителей и четвертых блок дифференциаторов подключены к первой и второй группам входов четвертого блока сумматоров, третья группа входов которого подключена к третьему блоку интеграторов, а выходы подключены к входам настройки второго и третьего блоков усилителей с переменным коэффициентом усиления.
| Борцов Ю.А | |||
| и др | |||
| Электро-механические системы с адаптивным и модальным управлением | |||
| Л.: Энергоатомиздат, 1984, с.109, рис.4.4. |
