1
Изобретение относится к области систем автоматического регулирования и может быть применено при управлении объектами с помощью двухдвигательных дифференциальных следящих приводов.
Известно устройство для формирования управляющего воздействия следящего привода, содержащее опорный и силовой каналы, соединенные с объектом через дифференциал, счетно-решающий блок, выходами соединенвый со входом элемента И, со входом компаратора, с датчиком входного воздействия привода, выход которого через чувствительный элемент и сумматор подключен ко второму входу следящего силового привода, реле реверса, соединенное со входом нервого триггера, второй триггер, реле индикации и реле запуска, подключенное к источнику питания.
В таком приводе движение объекта регулирования обеспечивается за счет разности вращений выходных валов опорного и следящего каналов, причем скорость вращения вала опориого каиала сохраняется постоянной. Датчик входного воздействия представляет собой интегратор.
Максимальная скорость движения выходного вала такого привода может быть увеличена при изменении в случае необходимости направлений и скоростей вращения исполнительных двигателей каналов: Такое увеличение скорости может быть необходимым при выполнении приводом наведения объекта регулирования в заданную точку за заданное время с обеспечением в ней заданной скорости дальнейплего движения.
Однако известное устройство не может обеспечить подачу требуемого сигнала на вход опорного капала.
Цель изобретения - повышение надежности работы устройства.
Это достигается введением блока ограничения тока управления выход которого соединен со входом опорного канала, а вход - с выходом компаратора и через реле реверса с первым входом второго триггера, второй вход которого подключен к выходу реле запуска.
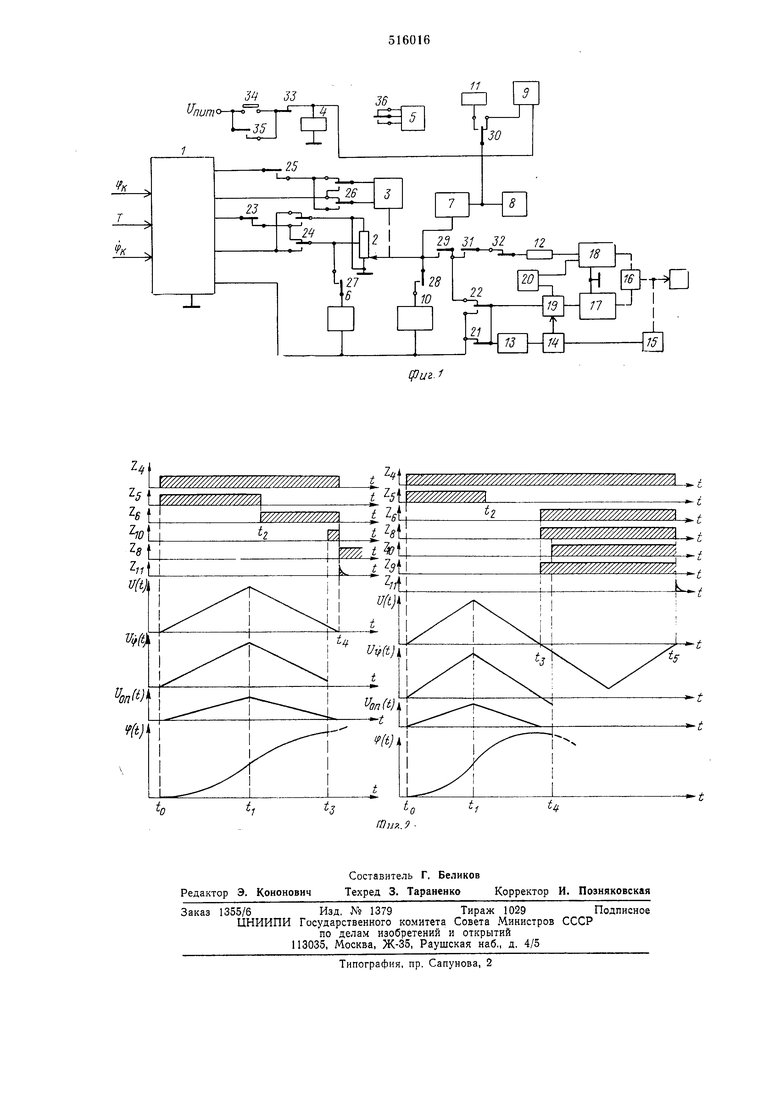
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - временные диаграммы работы устройства,
где фк - требуемый угол наведения объекта регулирования;
Т - требуемое время наведения; фк - требуемая скорость движения в заданной точке в конце наведения;
фмип и фмин - минил1альные необходимые значения максимальных скорости и ускорения движения объекта регулирования;
U(f(t) -текущее значение напряжения, пропорциональное текущей скорости движения;
3
и (t)-текущее значоппе напряжения на движке потенциометра;
U,,i(t) -- текущее значеппе напряжения на пыходе устроГкпти, сиязаииом со входом ()НО)ного кана.та ди ХД1И1гате.1ьн()1о дн(|)(|)е енциа.тьного с.1сдян1его нрнпода;
U( н LqMiii,- нанряженни, )H())iui{)на.тьные значениям ()мпн н ((мпи;
6(рк --напряжение, прс)по)пнонал1 ноо ((ь-;
(j:(/) --текунцч- значе |не тла нанедення;
бпит --нанряжепне гппання ре;п зап ека:
Z, - еостоянне /-го э.чемента yeiiioikTna («1 соотаетечтпет включенному соетоянню, «О 1и,1к;1К)ченном ).
Устропетно для формироиаппя унрав,-|Я1оП1,его воздейетвня двухдвигате.ппюго Д11())()1Сре11нпа.:||)ного смедящего прпвода еос1онт нз счетно-решающего б.юка 1, потенциометра 2 с неподвижным средним выводом. двигате,1я 3 с редуктором, ва.т котор01Ч) соединен с двнжком иотеиццомегра. реле 4 запуска, реле Г) вре.км1и, э;1емен1а G, 7 реверса, трн1Iepoii 8 н 9, компаратора 10, ре.к II 1П1Днкацнн окоичання работы н б.юка 12 )(М1пя тока правлення. Э.чемеит (J, Т М1Гг(ры 8 11 9 н комнаратор 10 соединены свонмн выхода.п1 с С(кггветсти -юни1мн )е.те.
Датчик 13 входного в()зде1 ет1Н1я иривода clioiiM В1 1ходом еоединен с nepiibiM входом чу1 ствнтел1)Ного элемента 14 двухдннгательного диф(|)ереппиа. следя1цего н)нвода. Вт(1рой вход чувствительного элемента 14 еоединеи с датчика 15 yi.:ia обьекта регу.тироваппя, соедииеиного с В1,1ходом дн()еренина,la 16.
13ход1)1 диф{)ереиина.1а соединены с выходом с,чедяп1его 17 н опорного 18 каналов ri Miвода. Вход сле;1ян1его (силового) Kaiia.ia 17 через схмматор 19 соединен с В1)1ходом чуветвительного элемеита 14.
Источник 20 сигналов, ироио)иноиа, требуелюн ве.тнчиие опориоГ скорости, также входящий в состав двухдвпгательного дифференциал1)Ного с,1едящего привода, еоед1Н1еи своимн двумя выходами с входом сумматора 19 и первым входом опориого канала 18.
Счетноднмпаюнип б.ток 1 пре.тназиачсм д.1я определеиия ио постуиаюии1м в него сигналам о требуемых тле паведеиия ((:i;. времени 7 наведеиия и скорости ери двпжения в задан ой точке в конце наведения велпч1П1 MHIUIмалвных необходимых зиачеиий максимальной
скорости фм ма КС Н ма Л ьного хскореиия фм движения объекта регулирования н формирования иа своих соответетвхчоншх выходах напряжений, пропорциональных этим велич1П1ам. Первый вы.ход ечетно-рен1а101цего блока 1, на который ноступает напряжение t/i J. пропорциональпое треб емой )етц
фк движеппя в заданной точке в конце наведения, соедииен с первым входом элеме1гга И 6, с первым входом компаратора 10 и через параллельно соединенные размыкаюнип контакт 21 )еле запуска и замыкаюнии) контакт 22 реле комнаратора с входом датчика 13 входного во.здействия. Второй выход счетиоpeiHaioHUTo блока 1 непосредственно, а тре|-иГ| через 3aMi)iKaioHuiii контакт 23 ре. 4 зануека соединены с дву.мя церек|)еет11осоедпие1Н1ыми груипами ненодвнжных контактов 24 рсле liioporo Ipiirrepa 9, подвижные 1-и,1воды которых соединены ео ередней точкой н об1)ед1П1еиными крайии.1п вывода.ми потенинометра 2. Па этих В1 1водах счети()-реи1а1ОHUTO б,1ока обра.чуется нанряжеиие L/i ,, и)(5норинона.ыюе 1реб емому значению .макспма:1Ьио| | скорости движёння обьскта регу.чироиаиия.
Четверть ечсТ 1о-ре1иа()имо блока 1 е 1оередетве1 но, л )Й чере:) зам)ка1О1ци| 1 ко1Г|-акт 25 pe.ie -1- запуска соедн1(М,| с дву.я 1ерекрес 1О-соеднне 1) груииамн перек. ко такт{И) 26 pe.ie первого 8; иодвиж 1)1е ко ггакт1) этих rjixnn соед1 1ен1) со входом .твигателя 3 с редук ором. ()да. счетпо-р() б, образуется 1 апряжеи)е f
С.ре.тняя точка потенпиометра 2 через раз. 27 pe.ie 5 1фемеии еоедине 1а е вторым входом элеме гга П 6, Двнжок 11оте пи-1ометра соединен со входом реле 7 ре iepca, через замь каюии1Й 28 - с втор)м входом компаратора 10 и через ( 29 реле запуска е иепод1И Ж 1 1м pa3Mi).M контактом 22 pe.ie комиа)ато)а. которого сое. с входом 13 «)зде11СТ И Я.
В,Х()д реле 7 реверса со входом иервого Трнггера 8. а также с нервы.м входом второго три1лтра 9 через размь ка ои1пй контакт 30 реле элемеита П и с входом реле 1 I иидикацпп око чания работы через замыкаюпщй контакт 30 реле элемеита И.
Псиодвиж Ь Й )азмыкаlOHUiИ ко1ггакт 22 pe.ie комиарато)а через иоеледователь 0 соедине 1ые размь ка ош.пй контакт 31 реле второго Tpiii-re|ia, замыкаюн1.11Й ко 1такт 32 реле зануека i б. 12 огра 1ичеиия тока правле 1ия с()ед1П1еи с вторым Х()дом 18 двухка аль 1ого дифференциального с, нрнвода.
4 запуска через размыкаюп1ий ко 1такт 33 pe;ie 1 1 и 1дика и п окончания работы и 34 1жл очения устройетва, зандптпрова 1 1у1о зам)1каюпи м коптактом 35 реле запуска, соед1 1е 1о е псточннко.м питания. Этот же в.ход реле заиуска соедине с вторым входом второго триггера 9.
Вход реле 5 времени соединен е переключа опи1мп контактами 36 реле 4 запхска.
С целью компенсации скоростной ошибки
в привод введен сигнал, цропорц1 011адь 1ый
скорости воздсйствия. Это осуществлено соединением входа датчика 13 входного воздействия с третьим входом сумматора 19.
Работа устройства для формирования управляюндего воздействия двухдвигателыюго дифференциального следяндего иривода происходит следующим образом.
Счетно-решающий блок 1 по полученным сигналам о требуемых угле наведения, времегш Т и требуемой скорости фк дальнейшего движения объекта регулирования в этот момент определяет величину и знак требуемой максимальной скорсти фм движения и величину модуля максимального ускорения фм движения; эти величины в виде напряжений U. и появляются между вторым и третьим и .между четвертым и пятым выходами счетнорещающего блока.
Команда на включение устройства подается нажатием кнопки 34 (в момент времени /о на фиг. 2). При этом происходит включение реле 4 запуска, которое производит следующие операции:
контактами 35 шунтирует кнопку 34, обеспечивая тем самым свое вк.тюченное состояние до окончания наведения и подготовки устройства к выполнению следующего цикла работы;
замыкая контакт 23, подводит напряжеиие и к среднему и объединенным крайним выводам потенциометра 2;
замыкая контакт 25, подводит напряжение /, к входу двигателя 3, который иачинаст перемещение движка потенциометра 2;
размыкая контакты 21 и замыкая контакты 29, отключает вход датчика 13 входного воздействия от иервого выхода счетно-решающего блока 1, па котором появилось напряжение f/фк, и подключает его к движку потенциометра 2;
замыкая контакты 31, подключает к движку потенциометра 2 последовательно соединенные блок 12 ограничения тока управления и вход опорного канала 18 двухдвигательного дифференциального следящего привода; с помощью контактов 36 включает реле 5 времени, что приводит к отключению контактом 27 первого входа элемента «И 6 от средней точки потенциометра 2 на время, определяемое временем срабатывания реле времени.
Одновременно с этим триггер 9 устанавливается в исходное состояние, когда его контакты 24 окажутся в исходном, заранее определенном состоянии, а контакт 32 - замкнутым.
Движок потенциометра 2, находивщийся в момент времени о в крайнем положении, при движении до средней точки линейно увеличивает снимаемое с его выхода напряжение U(t) до величины V (в момент времени t{), а затем так же линейно уменьшает его, продолжая перемещаться в том же направлении; при этом скорость erg перемещения определяется
скоростью вращения вала двигателя 3. т. е. требуемым ускорением фм движения объекта регулирования.
Напряжение f/(/) с движка потенциометра 2 подводится к входу датчика 13 входного воздействия и к корректирующему входу привода (т. е. третьему входу сумматора 19) полностью, а ко второму входу опорного канала 18 - через делитель, образованный блоком 12 ограничения тока управления и входным сопротивлением канала. При равенстве этих сопротивлений величина напряжения на этом входе опорного канала вдвое меньше, чем на корректирующем входе привода.
В момент времени t-, (см. фиг. 2) после окончания возбужденного состояния реле 5 времени его контакт 27 замыкается и подключает вход элемента «И 6 к средней точке потенциометра 2; в результате, имеющееся в
этой точке напряжение U оказывается подключенным к второму входу элемента «И, на первом входе которого имеется напряжеиие ,: к , пропорциональное требуемой конечной
скорости движения.
Дальнейшая работа устройства зависит от соотнощения знаков этих напряжений.
Если знаки совнадают, т. е. если совпадают знаки максимальной и требуемой конечной
скорости движеиия объекта регулирования (см. фиг. 2), то в момеит времеии /2 элемент И 6 обеспечит срабатывание своего реле, в результате чего его контакты 28 и 30 измеият свое состояние. При этом первый вход компаратора 10 окажется подключенным к движку потенциометра 2, нервый вход второго триггера 9 отключится от выхода реле 7 реверса, а на его место подключится вход реле 11 иидикации окончания работы устройства.
В момент времени /з, когда напряжение и(t) на движке потенциометра 2 станет равным напрял ению Li , компаратор 10 отключит с помощью контактов 22 вход датчика 13 входного воздействия от движка потеициометра 2 и подключит его к первому выходу счетио-рещающего блока 1.
Однако двигатель 3 продолжает вращать движок потенциометра 2, и напряжение с его
движка по-прежнему подведено к входу опорного канала 18.
В момент времени t это иапряжение приобретает нулевое значение, в результате чего реле 7 реверса формирует на своем выходе
сигнал управления, изменяющий состояние триггера 8 и ведущий к срабатыванию реле индикации окончания работы. В результате изменения триггером 8 своего состояния его контакты 26 изменят свое положение, подготовив двигатель 3 к вращению в обратном направлении, а реле индикации разомкнет свой контакт 33, расположенный в цепи включения реле 4 запуска. В итоге последнее изменит положение своих контактов 21, 23, 25,
29, 31 и 35, вернув их в исходное состояние,
т. с. состояние готониосП устройств; к c.ie;i кядему циклу работы.
В случае, если знаки иаиряжспиГ L, , ц в момент времени / ока/1 тся IKI.HHJIMH,
г к1-V1
то в этот момент управляемые элементом 11 6 контакты 28 и 30 останутся в исходном состоянии. Тогда в момент времени t, когда движок потенциометра 2 окажется в крайнем положении и наиряжение U(t) станет равиым нулю, реле реверса изменит состояние как триггера 8, так и триггера 9. В результате контакты 24 и 26 одновременно изменят свое ноложение, измеиив полярность напряжений как на движке потенциометра, так и иа в.ходе двигателя. Следовательио, линей 1ость нзменения наиряження U(i) сохранится, а само оно ириобретет протпвоположиый знак.
Одновременно с этим триггер 9 разомкнет свой контакт 32 в цени управляющего сигнала для опорного канала и в дальнейшем скорость движения двигателя этого каиала сохраннтся постоянной.
В этот же момент времени срабатывает э,1еMeirr «И 6, в результате чего коитакты 28 и 30 изменяют свое положеине, отключив вход триггера 9 от выхода реле ревсрса и подключив на его место реле индикации окончания работы, а также подключив первый вход компаратора 10 к движку ноте1пи1ометра 2, обеспечивая тем самым возможность срабатывания в MOMeirr времени 4. когда L(/) L.,., компаратора п размыкания с иомонцло его коитактов 22 цени: движок иотеннлометра вход датчика входпого воздействия, и с одиои|)еменным нодк.поченнем .татчика к первом} счет 1о-ре1нак)И1МЧ) б,1ока I.
Возврат устройства в исходное состояние в этом е;|учае, как и ранее, нронеходпт после достиження движком иоимиц-юметра 2 Kpaiiнего положения (в момент /5 иа фиг. 2.). В этот момент реле 7 реверса фор.ми)ует команду на иереброс Tpinrepa 8 в другое положение и иа срабатываине реле 11 индикации окончания работы хстройства, п()с,тедиее отключает реле 4 запуска, и устройство оказывается подготовленным к елед тои1ему срабатывай и ю.
Ф о р м у л а и 3 о б р е т е и li я
Устройство для формироваиия иравляюшего воздействия следяи1.его ири1юда. содержаи1ее опорный п спловой каналы, соединенные с объектом через дифференциал, счетиореи аю1ций блок, выходами соедииеииый с иервым входом э,1емеита И, со входом компаратора, с да1чнком входного 1и)здействня прпвода, 1И)1ход которого чере.з чувствите.тьный э;1еMeirr и еумма1ор подключен ко второ.му входу снлового канала, реле ревереа. соединенное со входом первого триггера, второй триггер, ре.те индикации и реле заиуска, иодключенное к источнику И1ггаиия, отличаюи1еее я тем, что, с пе.тью повышения надежности
работы, оио содержит блок ограиичения тока унрав.1ення, выход которого соединен со входом опорного канала, а вход - - с выходом комнаратора и через реле реверса с первым вход(П1 второго триггера, второй вход которого нодк.почен к выходу реле заиуска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления следящим приводом | 1973 |
|
SU648942A1 |
| УСТРОЙСТВО для САМОНАСТРОЙКИ ПАРАМЕТРОВ-- ^* | 1971 |
|
SU306447A1 |
| Имитатор пульсового сигнала | 1986 |
|
SU1360697A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| Джоульметр | 1987 |
|
SU1422171A2 |
| Устройство для защиты погружного электродвигателя от перегрузки и "сухого хода | 1986 |
|
SU1359840A1 |
| Устройство для преобразования разности частот двух электрических сигналов в постоянное напряжение | 1983 |
|
SU1185607A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ | 1972 |
|
SU334548A1 |