Изобретение относится к горной промышленности, в особенности к шахтным подъемным устройствам с гидравлическим приводом, и может быть использовано для доставки грузов по вертикальным и крутонаклонным стволам или другим горным выработкам угольной и горнорудной промышленности. Может быть использовано для удержания оборудования в стволе во время его проходки и в других отраслях промышленности для перемещения грузов.
Известна конструкция подъемного устройства, использующая для перемещения грузов гидроцилиндры с гибким штоком [1].
Недостатком известного устройства является то, что расстояние перемещения груза зависит от величины хода поршня гидроцилиндра и с увеличением расстояния приходится применять гидроцилиндры большой длины.
Указанный недостаток устранен в устройстве [2]. Недостатком является то, что в случае использования такого привода для лебедки холостая (нерабочая) ветвь каната должна быть убрана, например на барабан или катушку, которые должны иметь привод подмотки, предназначенный для создания небольшого постоянного натяжения холостой ветви, необходимого для нормальной укладки холостой ветви каната на катушку без образования петель, жучков и т.п. Указанное обстоятельство усложняет конструкцию лебедки, так как требует дополнительного использования двигателя, редуктора и барабана.
Необходима конструкция лебедки, свободной от указанных недостатков, т.е. отличаться простотой устройства и не требовать дополнительного двигателя подмотки.
Поставленная цель достигается тем, что для устранения указанных недостатков для создания постоянного натяжения холостой ветви каната барабан, на который осуществляется намотка холостой ветви каната, снабжен пружинным приводом, размещенным внутри барабана, а укладка каната на барабан осуществляется канатоукладчиком, состоящим из каретки, перемещаемой по направляющим при помощи бесконечной цепи, перемещаемой от барабана и попеременно сцепляемой с кареткой (нижней и верхней ее ветвями) при помощи зубьев, соединяющих указанную каретку с цепью, при достижении кареткой крайних положений, соответствующих размещению каната у левой и правой реборд.
На чертеже изображена предлагаемая лебедка с гидравлическим шаговым приводом, ее принципиальная кинематическая схема.
Лебедка с гидравлическим шаговым приводом состоит из корпуса 1, на котором смонтированы реверсивный гидравлический шаговый привод 2 с гибким штоком 3, на грузонесущей ветви которого подвешен крюк 4, гидравлический шаговый привод 2 работает под управлением системы управления 5. Гибкий шток 3 представляет собой стальной канат закрытой конструкции, его холостая ветвь 6 проходит через направляющие ролики 7, установленные на каретке 8, размещенной на направляющих 9. После этого гибкий шток поступает на навивочную поверхность (обечайку) барабана 10, который может поворачиваться относительно неподвижно установленной оси 11, на правой стороне указанного барабана 10 установлена реборда 121 увеличенного диаметра и служащая для использования ее для устройства дискового тормоза 13, а внутри барабана размещена спиральная пружина 14, один конец которой закреплен на оси 11, а другой конец прикреплен к внутренней поверхности обечайки барабана 10. На левой стороне барабана закреплена шестерня 15, которая через шестерню 16 связана с червяком 17, приводящим во вращение червячное колесо с размещенной на нем звездочкой 18, которая связана бесконечной цепью 19 со звездочкой 20. По цепи 19 могут свободно перекатываться ролики 21, установленные на каретке 8, на которой также установлены верхний подпружиненный зуб 22 и нижний подпружиненный зуб 23, контактирующие с переключающей штангой 24, которая также может контактировать с левым упором 25 и правым упором 26, размещенными на корпусе 1.
Предлагаемая лебедка с гидравлическим шаговым приводом работает следующим образом. Вначале, перед использованием лебедки по прямому назначению, необходимо произвести предэксплуатационные мероприятия. Главным из них является заполнение барабана 10 канатом закрытой конструкции - гибким штоком. Для этого конец каната, находящегося в заводской упаковке на катушке (на схеме не показанной), пропускают через грузонесущий тяговый привод (в соответствии с заводской инструкцией), затем при помощи системы управления 5 гибкий шток заставляют двигаться по направлению к барабану 10, пропускают через направляющие ролики 7, находящиеся на каретке 8, и подводят к барабану 10. После этого оттормаживают барабан 10 при помощи дискового тормоза 13 и сначала вручную, а потом при помощи вспомогательного привода (на схеме не показанного) производят закручивание спиральной пружины 14 путем проворачивания барабана 10. По окончании закручивания пружины 14 барабан 10 затормаживают дисковым тормозом 13.
Затем каретку 8, предварительно отжав вручную подпружиненные зубья 22 и 23, передвигают, например, в крайнее левое положение, располагая ее у упора 25. При этом штанга 24 перемещается вправо и своей клиновой частью поднимает зуб 22 в верхнее положение, в котором зуб 22 заходит в звено цепи 19 до упора в ролик 21, который дополнительно ограничивает перемещение цепи 19 относительно каретки 8 вверх. После этого приступают к закреплению конца каната 6 у левой реборды барабана 10. По окончании закрепления каната на барабане 10 он оттормаживается дисковым тормозом 13. При этом пружина 14, будучи ранее закрученной, начнет поворачиваться в направлении, противоположном направлению ее закручивания, при этом «выбирает» слабину каната и создает натяжение каната, необходимое для его упорядоченной укладки на барабане 10.
Одновременно с этим барабан 10, поворачиваясь, через шестерни 15 и 16 и червяк 17 поворачивает звездочку 18, которая заставляет перемещаться цепь 19, которая, будучи сцеплена через зуб 22 с кареткой 8, перемещает последнюю по направляющим 9, одновременно перемещает холостую ветвь 6 каната 3 вправо по навивочной поверхности барабана 10 на величину шага укладки каната за один полный оборот барабана. Это будет происходить постоянно, если гидравлический шаговый привод 2 будет подавать канат вверх. По достижении холостой ветвью 6 каната правой реборды 12 шток 24, воздействуя на упор 26, переместится под действием обратной реакции влево, заставляя зуб 23 опуститься вниз к звену цепи 19 до упора в ролик 21 и одновременно выводя зуб 22 из соприкосновения с цепью 19. Это приводит к тому, что каретка начнет двигаться влево и укладывать холостую ветвь 6 каната поверх первого слоя каната.
При работе гидравлического шагового привода 2 на опускание грузовой ветви 3 движение каната происходит в обратном направлении, в другом направлении происходит и вращение барабана 10, и перемещение холостой ветви каната при помощи каретки 8 будет происходить в обратном направлении, а пружина 14, которая в предыдущем случае раскручивалась, теперь начнет закручиваться, создавая при этом также натяг холостой ветви каната 6.
Литература
1. А.с. СССР №1368249, кл. В66В 15/00, 1988.
2. А.с. СССР №1404693, кл. F15В 11/12, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349537C2 |
| ЧЕТЫРЕХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349539C2 |
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2347737C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ГИБКОГО ТЯГОВОГО ОРГАНА НА БАРАБАН ЛЕБЕДКИ | 2017 |
|
RU2665999C1 |
| ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349538C2 |
| КАНАТОУКЛАДЧИК ЛЕБЕДКИ | 2008 |
|
RU2384518C1 |
| Устройство для замены гибкого тягового органа подъемно-транспортной машины | 1989 |
|
SU1696380A1 |
| Устройство для укладки каната на барабан лебедки | 1979 |
|
SU874592A1 |
| СТЕНД ДЛЯ ПЕРЕМОТКИ ТРОСА | 2022 |
|
RU2788263C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
Изобретение относится к лебедкам для перемещения грузов. Устройство состоит из двух неподвижно закрепленных гидроцилиндров, через которые пропущен гибкий шток, выполненный из каната закрытой конструкции. Гибкий шток имеет возможность быть попеременно захватываемым поршнями с управляемыми цангами, которые позволяют перемещать канат с грузом. Для создания постоянного натяжения холостой ветви каната барабан, на который осуществляется намотка холостой ветви каната, снабжен пружинным приводом, размещенным внутри барабана. Укладка каната на барабан осуществляется канатоукладчиком, состоящим из каретки, перемещаемой по направляющим цепью. Изобретение направлено на расширение технологических возможностей устройства. 1 ил.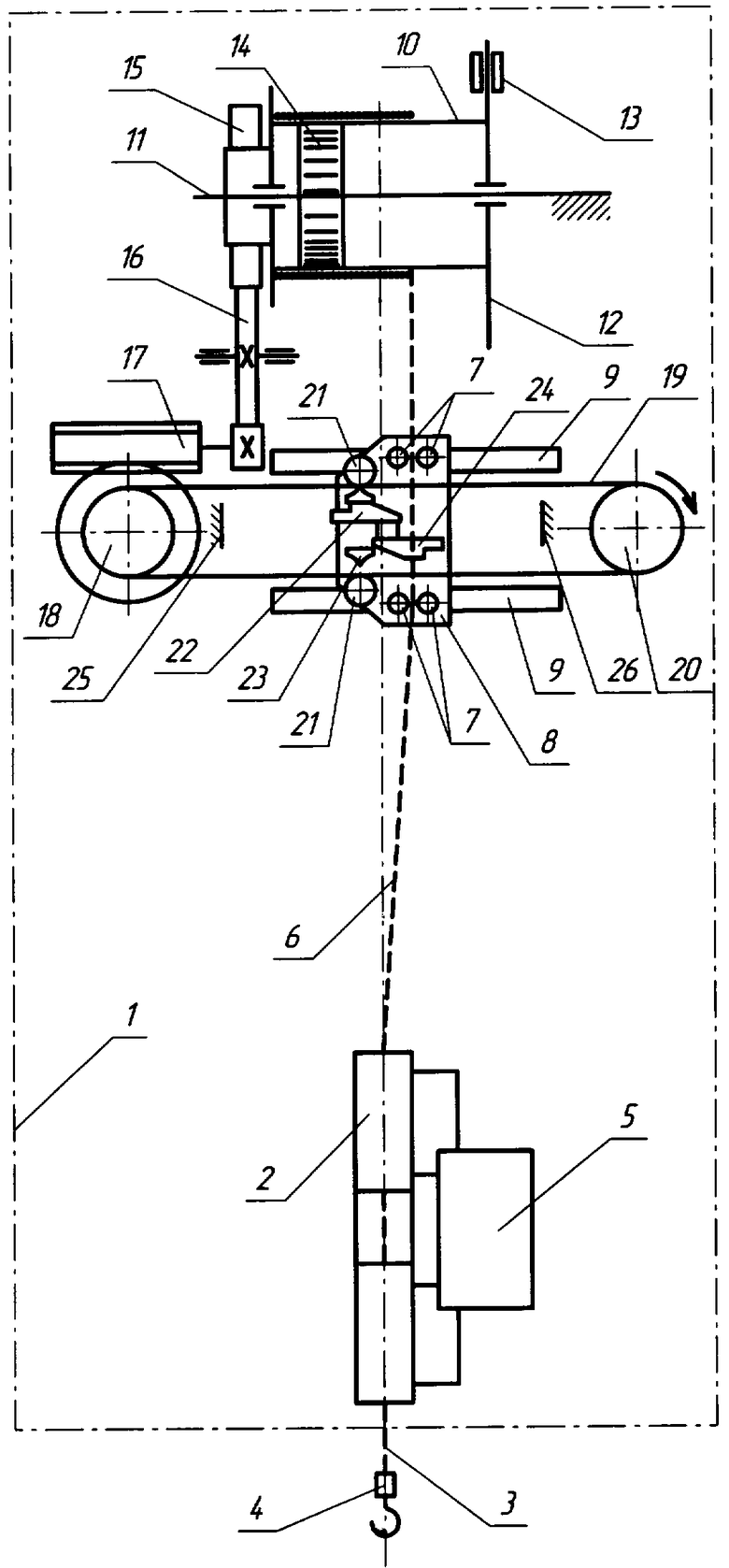
Лебедка с гидравлическим шаговым приводом, содержащая реверсивный шаговый привод с системой управления для перемещения гибкого штока в виде каната закрытой конструкции, барабан с дисковым тормозом для намотки холостой ветви каната и привод перемещения каретки канатоукладчика, отличающаяся тем, что указанный барабан снабжен пружинным приводом, размещенным внутри барабана, а каретка канатоукладчика перемещается по направляющим при помощи бесконечной цепи, перемещаемой от барабана и попеременно сцепляемой с кареткой нижней или верхней ее ветвями при помощи зубьев, соединяющих указанную каретку с цепью, при достижении кареткой крайних положений и соответствующих размещению каната у левой и правой реборд указанного барабана.
| Подъемное устройство | 1986 |
|
SU1368249A1 |
| Гидравлический шаговый привод | 1984 |
|
SU1404693A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1993 |
|
RU2048424C1 |
| Устройство для укладки каната на барабан лебедки | 1979 |
|
SU867866A1 |
| ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 0 |
|
SU197912A1 |
| СПОСОБ ТЕРМИЧЕСКОЙ ПЕРЕРАБОТКИ МАТЕРИАЛОВ РАСТИТЕЛЬНОГО ПРОИСХОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105034C1 |
| DE 3112344 А, 21.10.1982 | |||
| US 3854017A, 10.12.1974. | |||

