Изобретение относится к горной промышленности, в особенности к шахтным подъемным устройствам с гидравлическим приводом, и может быть использовано для доставки грузов по вертикальным и крутонаклонным стволам или другим горным выработкам угольной и горнорудной промышленности. Может быть использовано для удержания оборудования в стволе во время его проходки и в других отраслях промышленности для перемещения грузов.
Известна конструкция подъемного устройства, использующая для перемещения грузов гидроцилиндры с гибким штоком [1].
Недостатком известного устройства является то, что расстояние перемещения груза зависит от величины хода поршня гидроцилиндра и с увеличением расстояния приходится применять гидроцилиндры большой длины.
Указанный недостаток устранен в устройстве [2]. Однако использовать данное устройство для подъема грузов в вертикальном направлении нельзя, так как при перестановке поршня в цилиндре будет происходить опускание уже поднятого груза в первоначальное положение. Недостатком известного устройства является также периодическая остановка перемещаемого груза (в том числе и в горизонтальном направлении) при перестановке поршня в цилиндре. Недостатком является и то, что, в случае использования такого привода для лебедки холостая (нерабочая) ветвь каната должна быть убрана, например, на барабан или катушку, которые должны иметь привод подмотки, предназначенный для создания небольшого постоянного натяжения холостой ветви, необходимого для нормальной укладки холостой ветви каната на катушку без образования петель, жучков и т.п. Указанное обстоятельство усложняет конструкцию лебедки, так как требует дополнительного использования двигателя редуктора и барабана.
Поставленная цель достигается тем, что для устранения указанных недостатков на гибком штоке размещен второй такой же гидроцилиндр, направление вектора тяги которого противоположно направлению вектора тяги первого, и возвратная полость которого соединена с возвратной полостью первого гидроцилиндра и с гидропневмоаккумулятором, а гидрораспределители соединяют только рабочие полости указанных гидроцилиндров и подключают их к источникам питания и сливу.
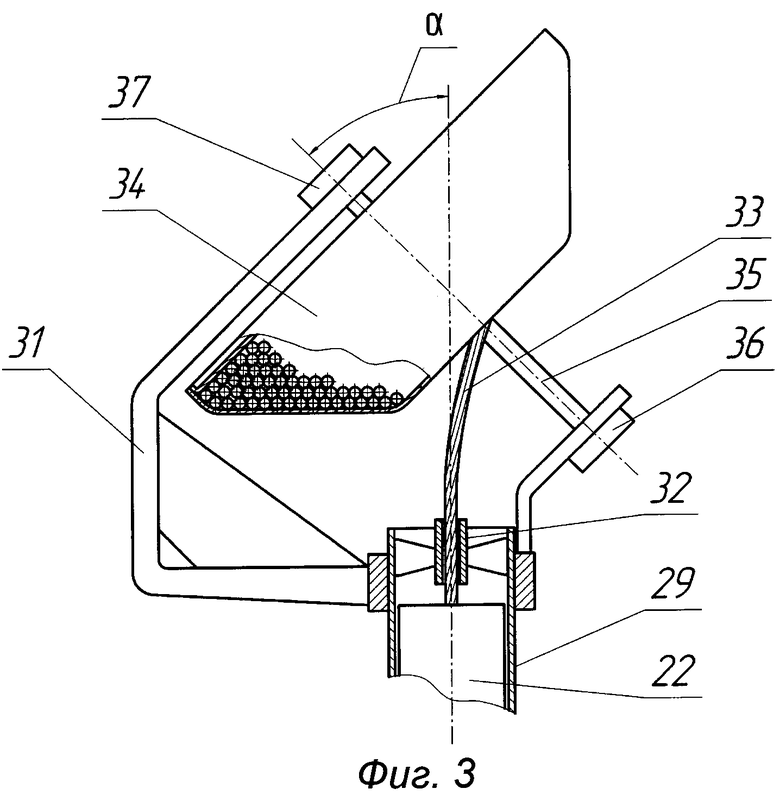
Для осуществления реверсивного тягового движения размещенных в цилиндрах поршней переключение распределителей происходит за счет подачи на них сигналов от соответствующих гидроцилиндров через логические элементы «И». Для размещения и аккумулирования холостой ветви каната на корпусе лебедки установлена корзина, ось вращения которой пересекается в пространстве с осью каната, проходящего через гидроцилиндры, под углом от 40 до 50 градусов. Сама корзина имеет форму усеченного конуса, меньший диаметр которого открыт и обращен к холостой ветви каната, а больший диаметр имеет днище, снабженное осью с подшипниками, и закрепленное на траверсе корпуса лебедки. Размеры корзины зависят от диаметра каната и его количества, а расстояние от обреза мундштука каната до корзины зависит от жесткости используемого каната и подбирается экспериментально.
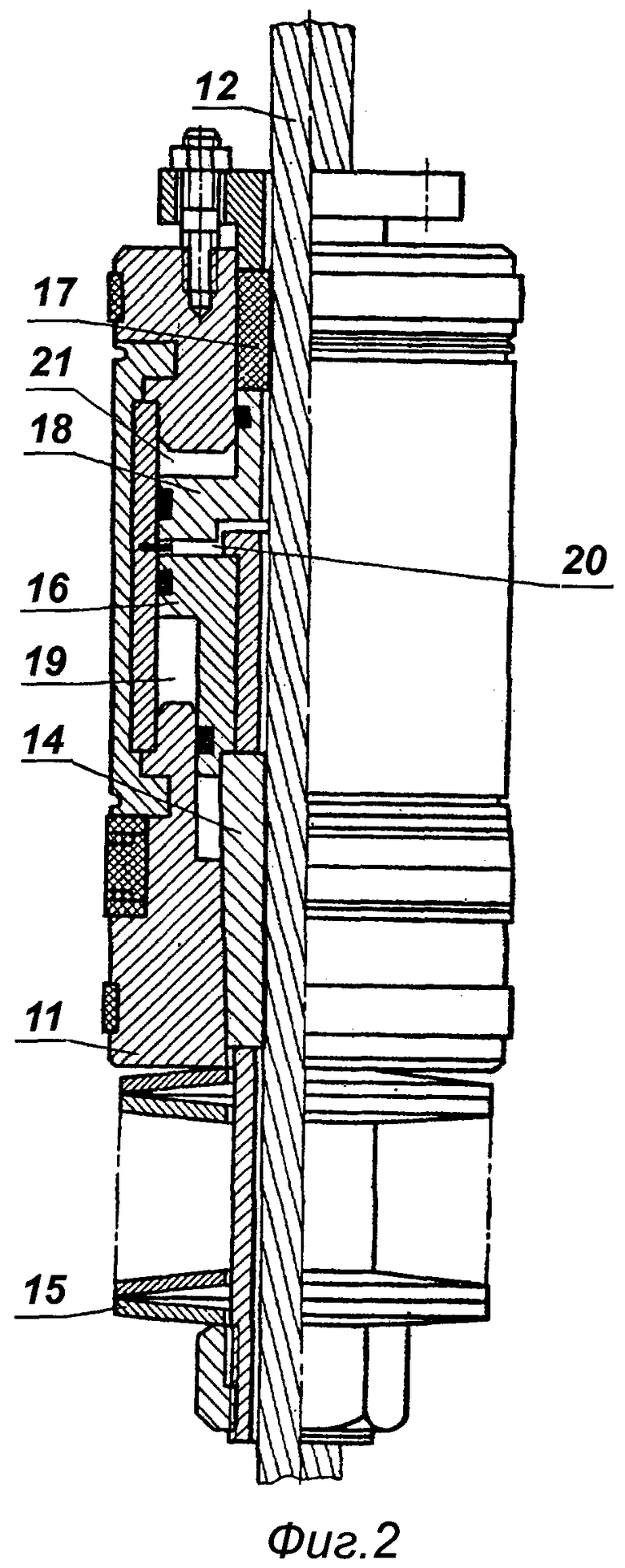
На фиг.1 изображена предлагаемая лебедка с гидравлическим шаговым приводом, ее принципиальная схема; на фиг.2 изображен разрез поршня с гибким штоком; на фиг.3 изображен вид слева на корзину и ее крепление на корпусе лебедки по фиг.1.
Лебедка с гидравлическим шаговым приводом содержит цилиндр 1 с рабочей 2 и возвратной 3 полостями и узлами 4 и 5 герметизации, насосный агрегат 6, распределители 7 и 8, датчики 9 и 10 контроля положения. В цилиндре 1 установлен поршень 11, имеющий возможность перемещения вдоль гибкого штока 12. Поршень 11 выполнен с расточкой 13, в которой размещена коническая цанга 14, подпружиненная при помощи пружины 15 относительно поршня 11, охватывающая гибкий шток 12 и взаимодействующая со ступенчатым поршнем 16, размещенным в поршне 11. Шток 12 уплотнен относительно поршня 11 поджимным сальником 17 с нажимным элементом 18. Ступенчатый поршень 16 и нажимной элемент 18 образуют в расточке 13 поршня 11 полости 19-21. При этом полости 19 и 21 сообщены посредством зазоров между частями сборного поршня с возвратной полостью 3, а полость 20 - с рабочей полостью 2. Гибкий шток 12 проходит также через второй гидроцилиндр 22, имеющий такие же узлы герметизации 4 и 5, рабочую 23 и возвратную полость 24 и поршень 25, имеющий точно такую же конструкцию, что и поршень 11 и поэтому изображенный на чертеже без разреза - непрозрачным. При этом поршень 25 так расположен в гидроцилиндре 22, что тяговое усилие, развиваемое им, направлено противоположно тяговому усилию, развиваемому поршнем 11. Возвратные полости 3 и 24 соединены между собой и гидропневмоаккумулятором 26 трубопроводами. Сигнал о крайнем левом положении поршня 11 и о крайнем левом положении поршня 25 поступает через логический элемент «И» 27 на датчик положения 10, а сигнал о правом положении поршня 11 и правом положении поршня 25 поступает через логический элемент «И» 28 на датчик положения 9. Гидроцилиндры 1 и 22 помещены в корпус цилиндрической формы 29 с фланцем 30 в нижней части для крепления лебедки. В верхней части корпуса размещены траверса 31 и мундштук 32, через который выходит холостая ветвь гибкого штока 33, конец которого помещен в корзину 34 конической формы с осью 35, вращающейся на подшипниках, расположенных в подшипниковых узлах 36 и 37, размещенных на траверсе 31. На рабочей ветви гибкого штока помещен крюк 38.
Лебедка с гидравлическим шаговым приводом работает следующим образом.
Предварительно лебедка с гидравлическим шаговым приводом устанавливается при помощи фланца 30 в вертикальном или горизонтальном положении. Рассмотрим работу лебедки при установке ее в вертикальном положении.
При подаче рабочей среды от насосного агрегата 6 через распределители 7 и 8 в рабочую полость 2 гидроцилиндра 1 рабочая среда одновременно по зазорам в сборном поршне 11 попадает в полость 20, воздействует на поршень 16 и нажимной элемент 18, осуществляя посредством цанги 14 фиксацию поршня 11 относительно гибкого штока 12 и надежное зажатие сальника 17 в зависимости от давления рабочей среды. Поршень 11 и шток 12, зафиксированные относительно друг друга, перемещаются вниз (по чертежу) и перемещают гибкий шток 12. При этом рабочая жидкость из возвратной полости 3 гидроцилиндра 1 выдавливается в возвратную полость 24 гидроцилиндра 22 и частично в гидропневмоаккумулятор 26, заставляя перемещаться поршень 25 в нижнее положение (поршень 25 работает также, как и поршень 11), выдавливая жидкость из полости 23 через распределитель 8 на слив. При подходе поршня 11 к крайнему нижнему положению и поршня 25 к крайнему нижнему положению сигналы об этом, через логический элемент «И» 27 (то есть, когда поршни обоих гидроцилиндров, двигаясь в одном направлении, достигнут нижнего крайнего положения, необходимого для переключения на обратное движение), будут поданы к датчику контроля положения 10. При этом распределитель 8 переключается в положение подачи рабочей среды в рабочую полость 23 гидроцилиндра 22 (рабочая полость 2 при этом сообщается со сливом). Поршень 25 при этом будет зафиксирован со штоком 12 (таким же образом, как в предыдущем случае, это происходило с поршнем 11) и начнет перемещаться в верхнее положение, осуществляя перемещение гибкого штока 12. В это же время рабочая жидкость из возвратной полости 24 будет выдавливаться в возвратную полость 3 гидроцилиндра 1 и частично в гидропневмоаккумулятор 26. Одновременно рабочая среда по зазорам в сборном поршне 11 попадает в полости 19 и 21, воздействует на ступенчатый поршень 16 и нажимной элемент 18, последние перемещаются в положение, позволяющее осуществить расфиксацию поршня 11 относительно штока 12 и ослабить зажатие сальника 17. Поршень 11 перемещается относительно штока 12 вверх. По достижении поршнем 11 крайнего верхнего положения и поршнем 25 крайнего верхнего положения сигналы об этом, через логический элемент «И» 28 (то есть, когда поршни обоих гидроцилиндров, двигаясь вверх, достигнут положения, необходимого для переключения на обратное движение), будут поданы к датчику контроля положения 9. При этом распределитель 8 переключится в положение подачи рабочей среды в рабочую полость 2 гидроцилиндра 1. Далее цикл повторяется многократно, если система не будет отключена распределителем 7. При этом груз, находящийся на крюке 38, удерживается и перемещается вверх, а холостая ветвь 33 каната 12, выйдя из мундштука 32 и будучи ранее направленной в корзину 34, изгибается (вправо или влево) и за счет сил перемещения каната, направленных вдоль его оси и действующих по касательной к образующей корзины 34, заставляют ее поворачиваться вместе с осью 35 относительно подшипниковых опор 36 и 37, а холостая ветвь 33 каната 12 будет при этом благодаря упругим свойствам каната, конической форме корзины 34 и ее расположению относительно корпуса лебедки и мундштука 32, упорядоченно размещаться в корзине и аккумулироваться в ней. Ось вращения корзины пересекается в пространстве с осью каната, проходящего через гидроцилиндры, под углом от 40 до 50 градусов. Размеры корзины зависят от диаметра каната и его количества, а расстояние от обреза мундштука каната до корзины зависит от жесткости используемого каната и подбирается экспериментально.
Для остановки системы в любой момент (например, вручную) достаточно при помощи распределителя 7 прекратить подачу рабочей жидкости от маслостанции 6. Для возобновления работы достаточно включить распределитель 7, а для осуществления реверса необходимо воздействовать на систему распределителем 8 (например, при местном управлении).
Литература
1. А.с. СССР №1368249, кл. В66В 15/00, 1988.
2. А.с. СССР №1404693, кл. F15В 11/12, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2347737C1 |
| РЕВЕРСИВНЫЙ ГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД | 2007 |
|
RU2335664C1 |
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349537C2 |
| ЧЕТЫРЕХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349539C2 |
| ПРИВОД ПОДЪЕМНОГО УСТРОЙСТВА | 2007 |
|
RU2339567C1 |
| ГИДРАВЛИЧЕСКОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2007 |
|
RU2349757C2 |
| ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2341446C1 |
| Гидравлический шаговый привод | 1984 |
|
SU1404693A1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД ОТРЫВОМ ОТ МАССИВА | 1988 |
|
RU2079653C1 |
| Механизм шагового перемещения по направляющей | 1990 |
|
SU1801853A1 |
Изобретение относится к горной промышленности, в особенности к шахтным подъемным устройствам с гидравлическим приводом. Устройство состоит из двух неподвижно закрепленных гидроцилиндров, через которые пропущен гибкий шток, выполненный из каната закрытой конструкции. Гибкий шток имеет возможность быть попеременно захватываемым поршнями с управляемыми цангами, которые позволяют перемещать канат с грузом. Перемещение поршней происходит под действием рабочей жидкости, подаваемой в гидроцилиндры распределителями от маслостанции. Обеспечение согласованного движения поршней в автоматическом реверсивном режиме осуществляется за счет подачи сигналов управления, поступающих от соответствующих гидроцилиндров на распределитель, через логические элементы «И». Холостая ветвь поднимаемого штока направляется через мундштук во вращающуюся корзину конической формы, установленную в месте выхода холостой ветви указанного каната, а ось вращения корзины составляет с осью каната в гидроцилиндре угол от 40 до 50 градусов. Это позволяет упростить конструкцию и расширить технологические возможности устройства. 3 ил.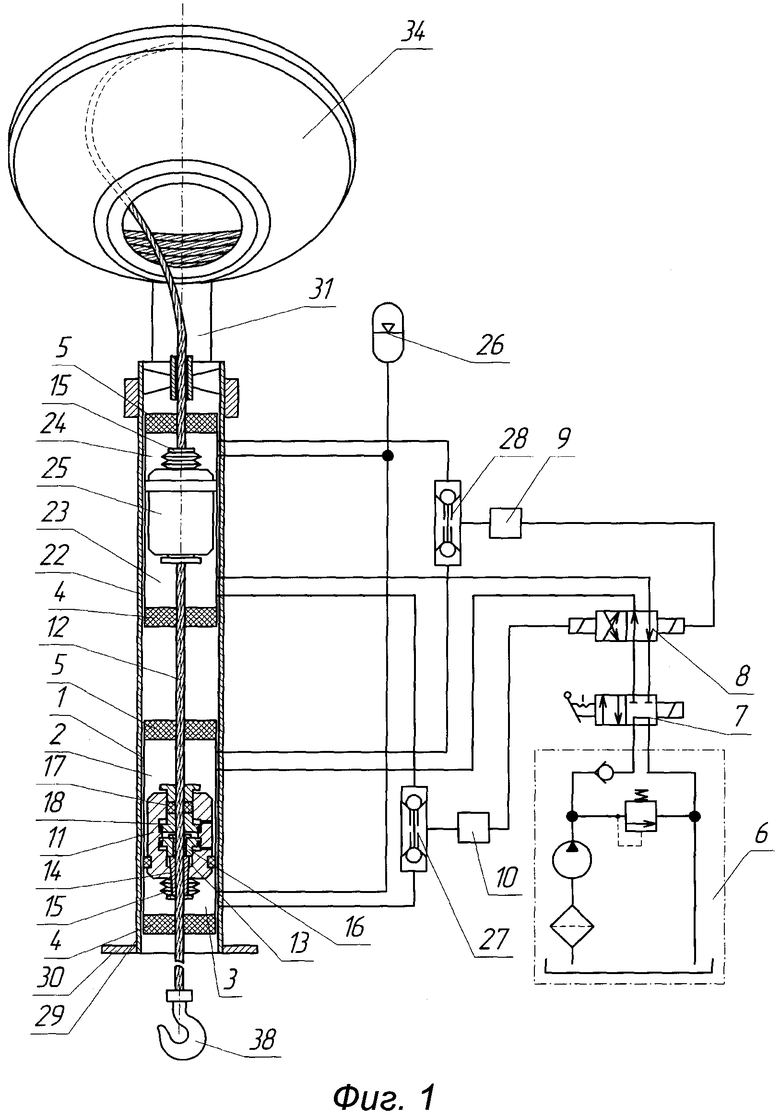
Лебедка с гидравлическим шаговым приводом, содержащая гибкий шток в виде каната закрытой конструкции, гидроцилиндр с рабочими и возвратными полостями и узлами герметизации, поршень, узел уплотнения поджимных сальников с нажимными элементами, размещенными в поршнях, полости, сообщенные с рабочими полостями гидроцилиндров, распределители, узлы фиксации в виде подпружиненных конических цанг, отличающаяся тем, что на гибком штоке размещен второй такой же гидроцилиндр, направление вектора тяги которого противоположно направлению вектора тяги первого, возвратные полости гидроцилиндров соединены между собой и с гидропневмоаккумулятором, а распределители соединяют только рабочие полости указанных гидроцилиндров и подключают их к источникам питания и сливу за счет подачи на распределители сигналов от соответствующих гидроцилиндров через логические элементы «И», а холостая ветвь перемещаемого каната направляется через мундштук во вращающуюся корзину конической формы, установленную в месте выхода холостой ветви указанного каната, а ось вращения корзины составляет с осью каната, проходящего через гидроцилиндры, угол от 40 до 50°.
| Подъемное устройство | 1986 |
|
SU1368249A1 |
| Гидравлический шаговый привод | 1984 |
|
SU1404693A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1993 |
|
RU2048424C1 |
| СПОСОБ ТЕРМИЧЕСКОЙ ПЕРЕРАБОТКИ МАТЕРИАЛОВ РАСТИТЕЛЬНОГО ПРОИСХОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105034C1 |

