Изобретение относится к автомобильной электронике и может быть использовано для формирования сигналов торможения самоходных средств и в автоматических системах определения тормозного пути в процессе испытаний транспортных средств.
Известны способы определения тормозного пути при испытании автомобилей, например, описанный в [1] и заключающийся в том, что с помощью прибора деселерографа записывают тормозную характеристику, на которой фиксируют время нарастания замедления, время оттормаживания, ускорение торможения, начальную скорость торможения и другие параметры. Затем в лабораторных условиях обрабатывают полученную диаграмму (деселерограмму) и вычисляют тормозной путь.
Расшифровка деселерограмм и вычисления делают этот способ достаточно трудоемким, малопроизводительным и неприменимым в условиях эксплуатации.
Известен также способ определения тормозного пути [2], заключающийся в том, что информацию о движении преобразовывают в скорость в виде первой последовательности импульсов, а интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой частотой, запоминают и, путем сравнения количества импульсов, запомненных в предыдущем и последующем интервалах между импульсами первой последовательности, определяют знак ускорения, по которому формируют и запоминают сигнал "Начало торможения", и с этого момента заполняют счетчик-сумматор импульсами первой последовательности, а результат отображают на индикации. Этот способ принят за прототип.
Недостатком данного способа является малая точность определения тормозного пути в условиях юза, когда информация о движении транспортного средства отсутствует.
Задача, решаемая в изобретении, заключается в повышении точности определения тормозного пути в условиях юза.
Это достигается тем, что в способе, заключающемся в том, что информацию о движении транспортного средства преобразуют в скорость в виде первой последовательности импульсов, а интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой постоянной частотой, запоминают и, путем сравнения количества импульсов, запомненных в предыдущем и последующем интервалах между импульсами первой последовательности, определяют отрицательный знак ускорения, по которому формируют и запоминают сигнал "Начало торможения" и с этого момента заполняют счетчик-сумматор импульсами первой последовательности, а результат отображают на индикации, дополнительно в период торможения каждое запомненное количество импульсов в одном из выделенных интервалов между импульсами первой последовательности сравнивают с заранее заданным количеством импульсов, соответствующим минимальной скорости транспортного средства, и, при превышении первого значения над вторым, формируют сигнал "Торможение юзом", которым запрещают поступление на счетчик-сумматор импульсов первой последовательности, а разрешают поступление кодов тормозного пути участка юза, которые формируют с выхода инерционного децелерометра, жестко закрепленного на транспортном средстве, только в период торможения транспортного средства. Формирование кодов тормозного пути участка юза осуществляют путем усиления и аналового-цифрового преобразования сигнала с выхода децелерометра в цифровой код, который дважды интегрируют по заданным интервалам времени и посылают на счетчик-сумматор, а заданные интервалы времени формируют из второй последовательности импульсов. Постоянную частоту второй последовательности импульсов выбирают из условия большей или равной удвоенной максимальной частоты первой последовательности импульсов. При этом на время действия каждого импульса первой последовательности прекращают действие второй последовательности импульсов.
На чертежах приведены структурные схемы реализации предложенного способа определения тормозного пути. На фиг. 1 показана общая блочная структурная схема, где обозначены:
S - информация о движении транспортного средства;
1 - блок преобразования информации о движении в скорость в виде первой последовательности импульсов f1;
2 - генератор постоянной частоты импульсов второй последовательности f2;
3 - блок определения и запоминания сигнала "Начало торможения" (НТ), включающий:
3-1 - распределитель сигналов последовательности f1 на три шины;
3-2, 3-3 - двоичные счетчики;
3-4 - устройство сравнения;
3-5, 3-6 - схемы совпадения &;
3-7 - элемент памяти;
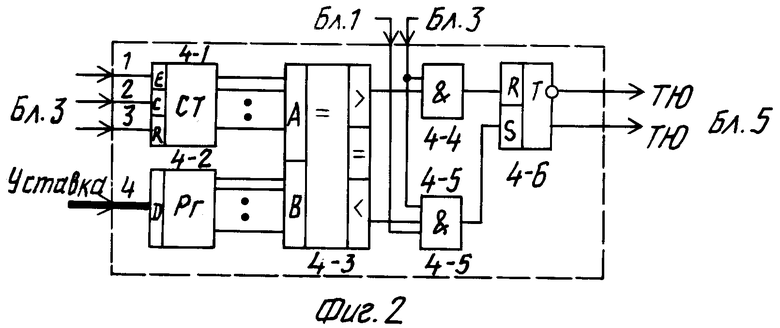
4 - блок формирования сигнала "Торможения юзом" (ТЮ), включающий:
4-1 - двоичный счетчик;
4-2 - регистр;
4-3 - устройство сравнения;
4-4, 4-5 - логические схемы совпадения &;
4-6 - элементы памяти;
5 - счетчик-сумматор, включающий:
5-1 - логическая схема совпадения;
5-2 - собственно счетчик со встроенным делителем;
5-3 - параллельный сумматор;
5-4 - группа логических вентильных схем П&;
6 - индикация;
7 - инерционный децелерометр, жестко закрепленный на транспортном средстве и перемещающий под действием ускорения контактный рычажок в ту или иную сторону от средней точки переменного резистора;
8 - усилитель, на выходе которого формируется электрический сигнал, пропорциональный ускорению (замедлению) транспортного средства;
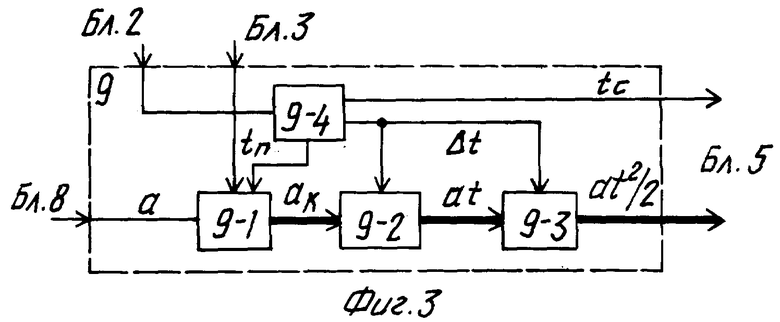
9 - блок формирования кодов тормозного пути на участке юза, включающий (фиг. 3):
9-1 - аналогово-цифровой преобразователь;
9-2, 9-3 - интеграторы;
9-4 - формирователь интервалов времени интервалов интегрирования).
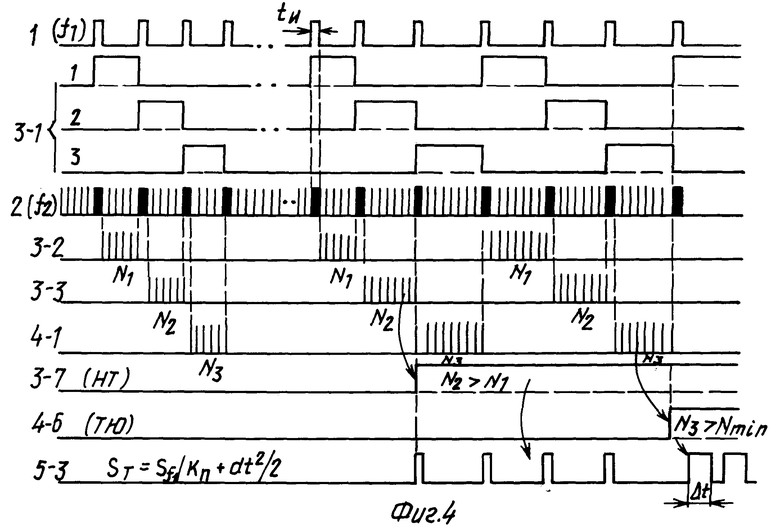
На фиг. 4 приведены временные соотношения сигналов на выходах соответствующих элементов и блоков, показанных на фиг. 1- 3.
Сущность предлагаемого способа заключается в следующем.
Информацию о движении транспортного средства S преобразуют в скорость (блок 1) в виде первой последовательности импульсов f1 с длительностью импульса tи (фиг. 4). Это преобразование осуществляют, например, с помощью магнитоэлектрического датчика, установленного на валу тросика спидометра транспортного средства.
с длительностью импульса tи (фиг. 4). Это преобразование осуществляют, например, с помощью магнитоэлектрического датчика, установленного на валу тросика спидометра транспортного средства.
Импульсы первой последовательности подают на распределитель сигналов 3-1 в блоке 3 (фиг. 1), на выходе которого выделяют поочередно три интервала между поступающими импульсами первой последовательности (на диаграмме показаны интервалы 1, 2, 3 на выходе элемента 3-1). Первый интервал с помощью счетчика 3-2 заполняют импульсами второй последовательности f2, формируемыми генератором 2, второй интервал - с помощью счетчика 3-3. Если количество импульсов во втором интервале меньше количества импульсов в первом интервале, то срабатывает схема 3-5, тем самым элемент памяти 3-7 устанавливается в нулевое положение. Если количество импульсов во втором интервале N2 больше количества импульсов в первом интервале N1, срабатывает устройство сравнения (начало торможения) 3-4 и через схему 3-6 третьим импульсом f1 элемент памяти 3-7 устанавливается в единичное состояние, которое сохраняется до полного останова. Началом третьего интервала счетчики 3-2, 3-3 гасятся, а счетчик 4-1 в блоке 4 формирования сигнала торможения юзом начинает заполняться импульсами N3 с частотой f2 и сравниваться с числом, заранее заданным на регистре 4-2 и соответствующим минимальной скорости транспортного средства (NMIN). Результат сравнения фиксируется на выходе устройства сравнения 4-3, отчего элемент памяти 4-6 с помощью логических элементов 4-4 и 4-5 устанавливается в одно из своих состояний. Если сработает схема 4-5, то на единичном выходе элемента 4-6 появится сигнал "Торможение юзом" (ТЮ). Так как сигнал с элемента 3-7 "Начало торможения" - НТ - формируется раньше, чем с элемента 4-6 - ТЮ -, то в счетчик 5-2 через логическую схему 5-1 блока 5 поступают импульсы с блока 1, которые подсчитываются с внутренним коэффициентом пересчета KП в линейные размеры тормозного пути, после чего переписываются в сумматор 5-3 и отображаются на индикации 6. Если не было юза, то тормозной путь SТ подсчитывается как
SТ = SF1/KП,
где SF1 - количество импульсов первой последовательности, поступившее на вход счетчика 5-2 с момента появления сигнала "Начало торможения" - НТ.
При появлении сигнала ТЮ открывается группа вентильных схем 5-4, а схема 5-1 закрывается сигналом  отчего с блока 9 формирования кодов тормозного пути через схемы 5-4 на сумматор 5-3 начинают поступать поочередно коды тормозного пути, которые суммируются в сумматоре 5-3 с предыдущим значением и отображаются на индикации 6.
отчего с блока 9 формирования кодов тормозного пути через схемы 5-4 на сумматор 5-3 начинают поступать поочередно коды тормозного пути, которые суммируются в сумматоре 5-3 с предыдущим значением и отображаются на индикации 6.
Формирование кодов тормозного пути участка юза осуществляют следующим образом. Электрический сигнал, снимаемый с децелерометра и пропорциональный величине ускорения транспортного средства, усиливается усилителем 8 и поступает на вход аналогово-цифрового преобразователя (АЦП) 9-1 (сигнал "α"), который преобразовывает его в цифровой код ak, только после поступления сигнала НТ (фиг. 3). Цифровые коды ak поступают на интегратор 9-2, который производит интегрирование на отрезке времени Δt, задаваемом формирователем интервалов времени 9-4. На выходе появляется код, значение которого равно αt. Это значение интегрируется описанным образом интегратором 9-3, на выходе которого появляется код, значение которого равно at2/2. Этот код посылается в блок 5 в сопровождении (стробировании) сигнала tс, который периодически формируется на втором выходе формирователя интервалов времени 9-4. Время преобразования АЦП (tП) значительно меньше времени интегрирования Δt.
Для нормальной работы устройств сравнения 3-4 и 4-3 необходимо, чтобы в счетчиках 3-2, 3-3, 4-1 было не меньше 2-х единиц информации, что возможно только при условии
f2 ≥ 2f1MAX,
Кроме того, для исключения ложных срабатываний указанных счетчиков в момент совпадения импульсов первой и второй последовательности формирования второй последовательности на время действия импульса первой последовательности запрещают подачей инверсного сигнала с блока 1 на вход блока 2.
Автоматическое определение начала торможения за счет сравнения интервалов между импульсами скорости транспортного средства позволяет точно отсчитывать тормозной путь, используя информацию о движении транспортного средства, а формирование сигнала "Торможение юзом" позволяет подсчитывать тормозной путь на конечном участке, используя информацию с инерционного децелерометра, что особенно важно, когда транспортное средство юзит, и информация о движении отсутствует. Таким образом решается задача повышения точности определения тормозного пути как на начальной стадии торможения, так и на его конечном участке.
Источники информации, принятые во внимание при экспертизе
1. Ройтман Б. А. и др. Безопасность автомобиля в эксплуатации. - М.: Транспорт, 1987.
2. Авторское свидетельство СССР N 1737846 МПК B 60 Q 1/44 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2247961C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2289803C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342644C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404897C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| СПОСОБ ВЫБОРА РЕЖИМА ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453822C1 |
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448853C1 |
Изобретение относится к контрольно-измерительной технике, используемой при испытаниях транспортных средств. В предложенном способе информацию о движении транспортного средства преобразуют в скорость в виде первой последовательности импульсов. Интервалы между импульсами заполняют импульсами второй последовательности с более высокой постоянной частотой, сравнивают количество импульсов в предыдущем и последующем интервалах, определяют отрицательный знак ускорения и формируют сигнал "Начало торможения". С этого момента заполняют счетчик-сумматор импульсами первой последовательности и отображают на индикации. Далее по количеству импульсов в одном из выделенных интервалов между импульсами первой последовательности и заданному количеству, соответствующему минимальной скорости транспортного средства, формируют сигнал "Торможение юзом", которым запрещают поступление на счетчик-сумматор импульсов первой последовательности, а разрешают поступление кодов тормозного пути участка юза, которые формируют с выхода инерц. децелерометра. Предложенный способ обеспечивает повышенную точность определения тормозного пути в условиях юза. 2 з.п. ф-лы, 4 ил.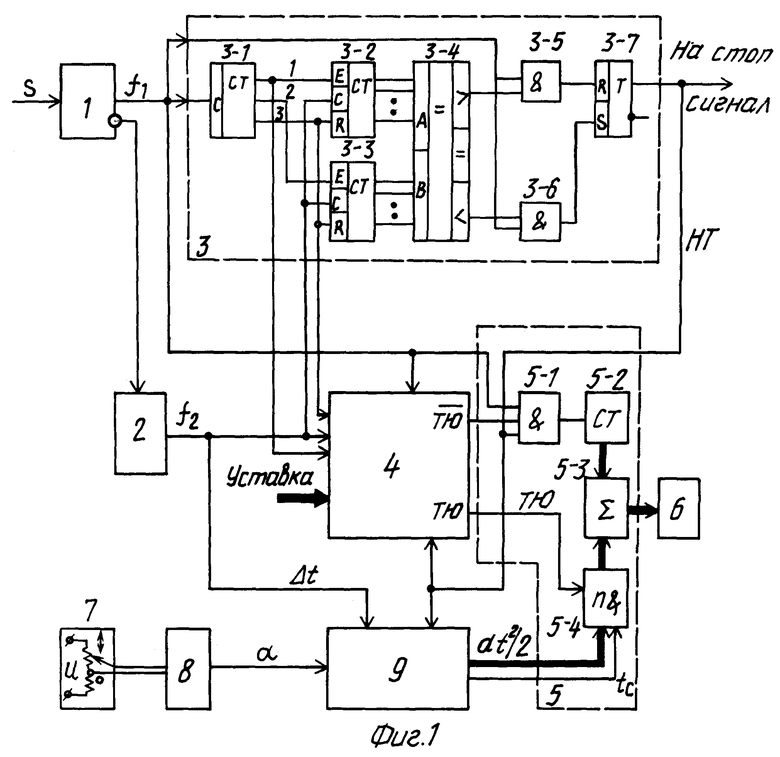
| SU 1568419 A1, 07.05.1991 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099741C1 |
| Устройство для определения тормозных и тяговых характеристик колесных машин | 1980 |
|
SU911196A1 |
