Изобретение относится к системам обнаружения объектов путем отражения от его поверхности радиоволн и может быть использовано в радиолокации для распознавания целей.
Известен способ распознавания, заключающийся в излучении в сторону цели электромагнитной энергии, приеме отраженных от цели сигналов, распознавании цели по принятому изображению геометрических размеров и конфигурации [Патент США №3978480, кл. G01S 9/00, 1974 г.].
Известно устройство для распознавания цели, содержащее последовательно соединенные антенну, радиолокационную станцию (РЛС), частотный анализатор, сравнивающее устройство и первый индикатор, первое запоминающее устройство (ЗУ) эталонов, выход которого соединен со вторым входом первого сравнивающего устройства, второй индикатор, вход которого соединен с выходом РЛС, последовательно соединенные второе ЗУ эталонов, второе сравнивающее устройство и третий индикатор, причем второй вход второго сравнивающего устройства соединен с выходом РЛС [Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, с.30].
Недостатками данных способа и устройства является невозможность распознавания сигналов, принадлежащих одной цели.
Наиболее близким к изобретению является способ распознавания сигналов, принадлежащих одной цели, основанный на излучении в сторону цели электромагнитной энергии и приеме отраженных от цели сигналов, осуществлении узкополосной фильтрации составляющих частот Доплера спектра отраженного сигнала, измерении частоты Доплера Δfi каждой составляющей спектра отраженного сигнала по номеру фильтра, определении угловых координат Δφi каждой составляющей спектра отраженного сигнала, определении собственной скорости движения каждой точки из выражения,  , где λ - длина волны излучаемого сигнала, сравнивают полученные значения собственной скорости движения каждой точки из выражения, ΔVi=|Vi-Vi+1|, при ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели [Винокуров В.И., Винокуров Д.В., патент РФ на изобретение №2410715].
, где λ - длина волны излучаемого сигнала, сравнивают полученные значения собственной скорости движения каждой точки из выражения, ΔVi=|Vi-Vi+1|, при ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели [Винокуров В.И., Винокуров Д.В., патент РФ на изобретение №2410715].
Наиболее близким к изобретению является устройство распознавания сигналов, принадлежащих одной цели, содержащее последовательно соединенные антенну, РЛС, частотный анализатор, а также n блоков измерения угловых координат, вычислитель и индикатор, причем каждый блок измерения угловых координат содержит последовательно соединенные амплитудный детектор, усилитель сигнала ошибки и детектор сигнала ошибки, выходы частотного анализатора соединены с входами блоков измерения угловых координат, выходы которых соединены с входами вычислителя, выход которого соединен с входом индикатора [Винокуров В.И., Винокуров Д.В. патент РФ на изобретение №2410715].
Недостатком данного способа и устройства является невозможность распознавания сигналов, принадлежащих групповой цели.
Технической задачей изобретения является расширение информативности за счет обеспечения возможности распознавания целей одиночных, групповых и распознавания числа одиночных целей при их полете в составе группы.
Сущность изобретения достигается тем, что в способе распознавания цели, заключающемся в излучении в сторону цели электромагнитной энергии и приеме отраженных от цели сигналов, осуществлении узкополосной фильтрации составляющих частот Доплера спектра отраженного сигнала, измерении частот Доплера Δfi каждой составляющей спектра отраженного сигнала по номеру фильтра, определении угловых координат Δφi каждой составляющей спектра отраженного сигнала, определении собственной скорости движения каждой блестящей точки распознаваемой цели в соответствии с выражением  , где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом, в случае ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, дополнительно определяют групповую цель на основе сравнения полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом, в случае если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей входящих в состав групповой цели на основе сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом, в случае ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, дополнительно определяют групповую цель на основе сравнения полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом, в случае если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей входящих в состав групповой цели на основе сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением  , где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
Способ реализуется в устройстве распознавания цели содержащим последовательно соединенные антенну, РЛС и частотный анализатор, а также n блоков измерения угловых координат, вычислитель и индикатор цели, причем каждый блок измерения угловых координат содержит последовательно соединенные амплитудный детектор, усилитель сигнала ошибки и детектор сигнала ошибки, выходы частотного анализатора соединены с входами блоков измерения угловых координат, выходы которых соединены с входами вычислителя, выход которого соединен с входом индикатора, при этом в вычислителе определяют собственную скорость движения каждой блестящей точки распознаваемой цели из выражения
, где λ - длина волны излучаемого сигнала, сравнивают полученные значения собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, дополнительно определяют групповую цель на основе сравнении в вычислителе значений собственной скорости движения каждой блестящей точки ΔVi=|Vi-Vi+1| с пороговым значением U1, при этом в случае ΔVi≥U1, принимают решение о принадлежности сигналов групповой цели, определяют число целей, входящих в состав групповой цели на основе сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением  , где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
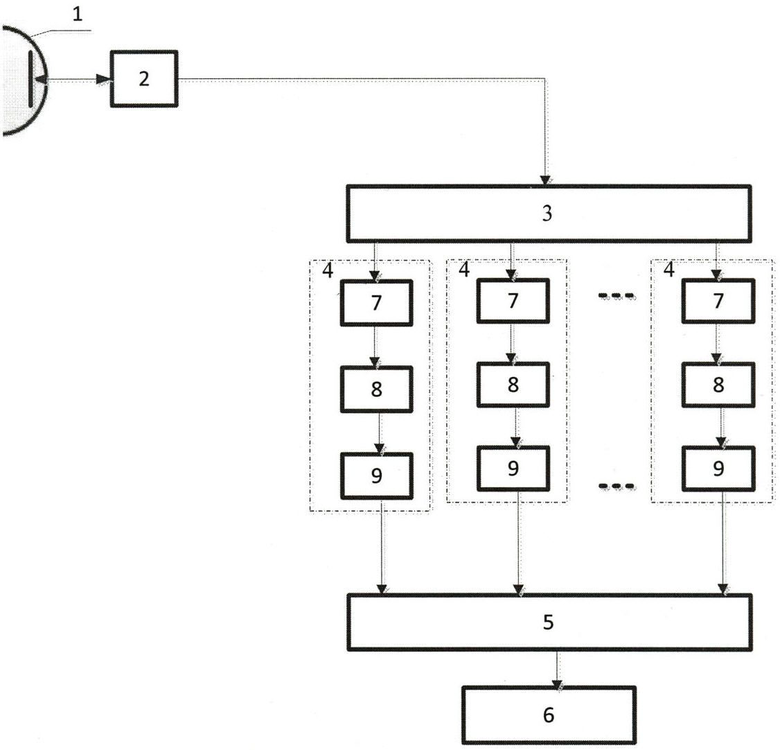
На чертеже приведена функциональная схема устройства распознавания сигналов, принадлежащих одной цели, где 1 - антенна; 2 - РЛС; 3 - частотный анализатор; 4 - блок измерения угловых координат; 5 - вычислитель; 6 - индикатор цели, 7 - амплитудный детектор; 8 - усилитель сигнала ошибки; 9 - детектор сигнала ошибки.
Устройство распознавания групповой цели содержит последовательно соединенные антенну 1, РЛС 2, а также частотный анализатор 3, n блоков 4 измерения угловых координат, вычислитель 5, индикатор 6, причем каждый блок 4 измерения угловых координат содержит последовательно соединенные амплитудный детектор 7, усилитель сигнала ошибки 8 и детектор сигнала ошибки 9, выходы частотного анализатора 3 соединены с входами блоков измерения угловых координат 5, выходы которых соединены с входами вычислителя 6, выход которого соединен с входом индикатора 6.
Устройство распознавания групповой цели, функционирует следующим образом.
Отраженный от движущейся цели сигнал поступает на вход антенны 1 и через РЛС 2 поступает на вход частотного анализатора 3, где осуществляется расфильтровка сигнала по n узкополосным каналам. Сигналы с выходов каждого фильтрового канала поступают на входы блоков 4 измерения угловых координат, где производится измерение угловых координат сигнала с каждого фильтрового канала. Сигналы с выходов блоков 4 измерения угловых координат поступают в вычислитель 5, где производится определение собственной скорости движения каждой блестящей точки из выражения
, где λ - длина волны излучаемого сигнала, сравнение полученных значений собственной скорости движения каждой блестящей точки из выражения ΔVi=|Vi-Vi+1|, при ΔVi≤U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов одиночной цели.
В случае если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели.
Определяют число целей, входящих в состав групповой цели, путем сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где U1n - пороговые значения.
Пороговые значения определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
Сигналы с выхода вычислителя 5 поступают на вход индикатора 6, на котором высвечивается информация о принадлежности сигналов одиночной или групповой цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484498C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ, ПРИНАДЛЕЖАЩИХ ОДНОЙ ЦЕЛИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410715C2 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2487804C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492501C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2496662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478920C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
Изобретение относится к системам обнаружения объектов и может быть использовано в радиолокации для распознавания цели. Сущность изобретения заключается в излучении в сторону цели электромагнитной энергии и приеме отраженных от цели сигналов, узкополосной фильтрации составляющих частот Доплера спектра отраженного сигнала, измерении частоты Доплера Δfi каждой составляющей спектра отраженного сигнала по номеру фильтра, определении угловых координат Δφi каждой составляющей спектра отраженного сигнала, определении собственной скорости движения каждой блестящей точки распознаваемой цели из выражения  , где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, принятии решений о принадлежности сигналов одной цели, в случае ΔVi≤U, где U - пороговое значение, в дополнительном определении групповой цели на основе сравнений полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей входящих в состав групповой цели, на основе сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, принятии решений о принадлежности сигналов одной цели, в случае ΔVi≤U, где U - пороговое значение, в дополнительном определении групповой цели на основе сравнений полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей входящих в состав групповой цели, на основе сравнении скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением  , где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей. Достигаемый технический результат изобретения - повышение информативности. 2 н.п. ф-лы, 1 ил.
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей. Достигаемый технический результат изобретения - повышение информативности. 2 н.п. ф-лы, 1 ил.
1. Способ распознавания цели, заключающийся в излучении в сторону цели электромагнитной энергии и приеме отраженных от цели сигналов, осуществлении узкополосной фильтрации составляющих частот Доплера спектра отраженного сигнала, измерении частот Доплера Δfi каждой составляющей спектра отраженного сигнала по номеру фильтра, определении угловых координат Δφi каждой составляющей спектра отраженного сигнала, определении собственной скорости движения каждой блестящей точки распознаваемой цели в соответствии с выражением  , где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, отличающийся тем, что определяют групповую цель на основе сравнения полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае, если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей, входящих в состав групповой цели, на основе сравнения скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
, где λ - длина волны излучаемого сигнала, сравнении полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, отличающийся тем, что определяют групповую цель на основе сравнения полученных значений собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при этом в случае, если ΔVi≥U1, где U1 - пороговое значение, принимают решение о принадлежности сигналов групповой цели, определяют число целей, входящих в состав групповой цели, на основе сравнения скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
2. Устройство распознавания цели содержит последовательно соединенные антенну, РЛС и частотный анализатор, а также n блоков измерения угловых координат, вычислитель и индикатор цели, причем каждый блок измерения угловых координат содержит последовательно соединенные амплитудный детектор, усилитель сигнала ошибки и детектор сигнала ошибки, выходы частотного анализатора соединены с входами блоков измерения угловых координат, выходы которых соединены с входами вычислителя, выход которого соединен с входом индикатора, при этом в вычислителе определяют собственную скорость движения каждой блестящей точки распознаваемой цели из выражения
, где λ - длина волны излучаемого сигнала, сравнивают полученные значения собственной скорости движения каждой блестящей точки в соответствии с выражением ΔVi=|Vi-Vi+1|, при ΔVi≤U, где U - пороговое значение, принимают решение о принадлежности сигналов одной цели, отличающееся тем, что определяют групповую цель на основе сравнения в вычислителе значений собственной скорости движения каждой блестящей точки ΔVi=|Vi-Vi+1| с пороговым значением U1, при этом в случае ΔVi≥U1 принимают решение о принадлежности сигналов групповой цели, определяют число целей входящих в состав групповой цели на основе сравнения скоростей движения блестящих точек целей с пороговыми значениями в соответствии с выражением
, где U1n - пороговые значения, которые определяются с учетом дистанций движений целей в группе и соответственно скоростей движения блестящих точек различных целей.
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ, ПРИНАДЛЕЖАЩИХ ОДНОЙ ЦЕЛИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410715C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2027199C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ ДЛЯ БОРТОВОГО ОБЗОРНОГО РАДИОЛОКАТОРА | 1997 |
|
RU2143706C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| US 3860929 A, 14.01.1975 | |||
| WO 1998036289 A1, 20.08.1998 | |||
| US 4490718 A, 25.12.1984 | |||
| Якорная связь | 1982 |
|
SU1041398A1 |

