Изобретение относится к области неразрушающего контроля, а именно к средствам обнаружения дефектов проката и конструкций типа лент, полос, труб, сосудов, рельсов и др. из черных и цветных металлов и сплавов в широком диапазоне толщин при одностороннем бесконтактном доступе, и предназначено для применения в металлургии, машиностроении, авиастроении, автомобилестроении, в нефтегазовой и др. отраслях промышленности.
Известны электромагнитно-акустические (ЭМА) преобразователи (ЭМАП) для обнаружения дефектов проката и конструкций типа лент, полос, труб, сосудов, рельсов и др. из черных и цветных металлов и сплавов в широком диапазоне толщин при одностороннем бесконтактном доступе [1. Авт. свид. СССР №411369. 2. Авт. свид. СССР №380364. Бюл. изобр. №21, VII, 1973 г. 3. Никифоренко Ж.Г., Булавинов А.И., Рокштро Б., Ягер В., Рост П. УЗК литых аустенитных труб с помощью ЭМА-преобразователей. В мире НК. 2003. №1 (19), с.22-23. 4. G. Hübschen, English by R. Diederichs. Generation of Horizontally Polarized Shear Waves with EMAT Transducers. NDTnet, 1998, march, vol.3, № 3]. Эти технические решения позволяют обнаруживать дефекты по всей толщине изделия благодаря возбуждению сдвиговых (поперечных) ультразвуковых нормальных волн (SH-волн). Однако эти решения имеют существенные недостатки.
Известен ЭМА-преобразователь для контроля изделий [Авт. свид. СССР №411369], содержащий магнит и плоскую спиральную катушку индуктивности (индуктор), располагаемую между рабочим торцом магнита и контролируемым изделием, при этом рабочий торец магнита выполнен в виде гребенчатой структуры. На рабочем торце магнита выполнена вторая гребенчатая структура, выступы одной из структур совпадают с серединами впадин другой, а катушка размещена таким образом, что одна из ее сторон находится над одной гребенчатой структурой, а другая - над второй. Указанный ЭМАП не обеспечивает необходимой чувствительности и имеет низкое отношение сигнал/шум.
Наиболее близким решением является ЭМА-преобразователь для возбуждения сдвиговых (поперечных) ультразвуковых нормальных волн [2. Авт. свид. СССР №380364. 3. Никифоренко Ж.Г., Булавинов А.Н., Рокштро Б., Ягер В., Рост П. УЗК литых аустенитных труб с помощью ЭМА-преобразователей. В мире НК. 2003. №1 (19), с.22-23. 4. G. Hübschen, English by R. Diederichs. Generation of Horizontally Polarized Shear Waves with EMAT Transducers. NDTnet, 1998, march, vol.3, № 3], содержащий магнитную систему с расположенными на заданном расстоянии друг от друга группами магнитов в форме параллелепипедов с компланарными чередующимися полюсами и плоскую высокочастотную катушку (индуктор), расположенную в параллельной полюсам магнитов плоскости на минимальном от них расстоянии, в пределах активной части витков которой перпендикулярно к ним лежат проекции полюсов магнитов на плоскость катушки, и протектор. Этот ЭМАП также не обеспечивает требуемой чувствительности при контроле как в ручном, так и в автоматическом режиме объектов из различных материалов.
Сущность заявляемого изобретения состоит в том, что в электромагнитно-акустический преобразователь, содержащий магнитную систему с расположенными на заданном расстоянии друг от друга группами магнитов в виде параллелепипедов с компланарными чередующимися полюсами, первый плоский индуктор, расположенный в параллельной полюсам магнитов плоскости на минимальном от них расстоянии, в пределах активной части витков которого перпендикулярно к ним лежат проекции полюсов магнитов на плоскость индуктора, и протектор, введены полюсные наконечники из ферромагнитного материала и дополнительные магниты в форме параллелепипеда и второй плоский индуктор, а протектор выполнен из плоской электропроводящей шины в виде меандра, при этом полюсные наконечники устанавливаются на полюса магнитов со стороны индуктора, дополнительные магниты устанавливаются по обе стороны полюсных наконечников так, чтобы полярность всех примыкающих к полюсным наконечникам полюсов была одинаковой, направление намагничивания дополнительных магнитов выбирается от одного полюсного наконечника к другому, второй индуктор располагается в параллельной полюсам магнитов плоскости на минимальном от полюсных наконечников расстоянии, активные части витков второго индуктора располагаются под разноименными полюсами магнитов, а витки меандра протектора ориентированы поперек витков первого плоского индуктора.
Техническим результатом применения предложенного ЭМАП является то, что он позволяет расширить функциональные возможности (наряду с обнаружением дефектов типа трещин обнаруживаются дефекты эрозионного характера и измеряется остаточная толщина стенки конструкции) и области применения аппаратуры, работающей совместно с предложенным ЭМАП, за счет улучшения отношения сигнал/шум и чувствительности аппаратуры.
На чертеже показан общий вид ЭМАП для возбуждения сдвиговых (поперечных) ультразвуковых нормальных волн и сдвиговых объемных волн, где а - вид сверху, б - вид сбоку, в - вид снизу.
ЭМАП содержит магнитную систему с расположенными на заданном расстоянии друг от друга группами магнитов 1, 2 в форме параллелепипедов с компланарными чередующимися полюсами и первый плоский индуктор 3, расположенный в параллельной полюсам магнитов плоскости на минимальном (доли миллиметров) от них расстоянии, в пределах активной части витков которого перпендикулярно к ним лежат проекции полюсов магнитов на плоскость индуктора 3. В ЭМАП введены полюсные наконечники 4 из ферромагнитного материала и дополнительные магниты в форме параллелепипедов 5, при этом полюсные наконечники 4 устанавливаются на полюса магнитов со стороны индуктора, направление намагничивания дополнительных магнитов 5 выбирается от одного полюсного наконечника к другому, а дополнительные магниты 5 устанавливаются по обе стороны полюсных наконечников 4 так, чтобы полярность всех примыкающих к полюсным наконечникам 4 полюсов была одинаковой. Чередование полюсов распространяется на обе части индуктора 3, причем полярность полюсных наконечников 4, расположенных над частями индуктора 3 с противоположным направлением витков, также имеет противоположное значение.
Второй плоский индуктор 6 расположен в параллельной полюсам магнитов плоскости на минимальном от них расстоянии (также доли миллиметров), активные части витков индуктора 6 расположены под разноименными полюсами магнитов, а протектор 7 выполнен из плоской электропроводящей шины в виде меандра, витки которого ориентированы поперек витков первого индуктора 3, что обеспечивает воздействие импульса возбуждения на поверхность объекта контроля и прием информативных сигналов без существенного ослабления и одновременно экранирует индуктор 3 от внешних наводок. Кроме того, протектор является индикатором повреждения рабочей поверхности ЭМАП. С целью повышения прочности ЭМА-преобразователя свободное пространство между магнитами заполняется либо компаундом 8 на основе, например, эпоксидной смолы, либо скрепляется с помощью детали в виде гребенки из немагнитного материала.
В зависимости от конструктивных параметров магнитной системы и индуктора 3 в объекте контроля 9 возбуждаются нормальные сдвиговые волны со смещениями поперек направления распространения волны, мода (тип) сдвиговой волны и рабочая частота определяются расстоянием между полюсными наконечниками 4. Ультразвуковые колебания возникают в результате взаимодействия вихревых токов, наводимых при подаче на индуктор 3 импульса высокочастотных колебаний, и магнитного поля магнитной системы 1, 2.
При воздействии импульса возбуждения на индуктор 6 в поверхностном слое объекта контроля в присутствии внешнего магнитного поля возникают импульсы сдвиговых объемных волн, которые характеризуют остаточную толщину стенки изделия или конструкции.
Работа ЭМА-преобразователя
ЭМА-преобразователь для возбуждения УЗ-колебаний располагают над поверхностью контролируемой конструкции или проката 9. Одновременно или поочередно на индукторы 3 и 6 ЭМА-преобразователя подают импульсы высокочастотных колебаний, наводящие в поверхностном слое конструкции или проката вихревые токи. Для возбуждения сдвиговых горизонтально-поляризованных (SH) волн ЭМАП обеспечивает магнитные потоки противоположного направления через локальные области поверхности материала с наведенными вихревыми токами, созданными в материале электромагнитным полем первого плоского индуктора 3, тоже противоположного направления. Под действием сил Лоренца в поверхностном слое объекта контроля 9 возникает сдвиговая нормальная волна, распространяющаяся в направлении, соответствующем направлению витков активной части индуктора 3. Прием импульсов ультразвуковых колебаний и их преобразование в электрические сигналы обеспечивает этот же ЭМАП. Для измерения толщины стенки изделия используется второй плоский индуктор 6, обеспечивающий возбуждение сдвиговых объемных волн, многократно переотражающихся от поверхностей стенки изделия.
Далее регистрируют отраженные от дефектов акустические сигналы сдвиговой нормальной волны и по их амплитуде и временному положению оценивают условные размеры и координаты дефектов. По скорости и времени распространения многократно отразившихся от стенок эхосигналов сдвиговой волны УЗ-колебаний в материале судят о толщине стенки изделия.
Техническим результатом применения предложенного ЭМАП является то, что он позволяет расширить функциональные возможности (наряду с обнаружением дефектов типа трещин обнаруживаются дефекты эрозионного характера и измеряется остаточная толщина стенки конструкции) и области применения аппаратуры, работающей совместно с предложенным ЭМАП, за счет улучшения отношения сигнал/шум и чувствительности аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2334981C1 |
| МАГНИТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2007 |
|
RU2350943C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2626577C2 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2345356C2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2447430C1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ СТЕНОК ФЕРРОМАГНИТНЫХ КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ | 2005 |
|
RU2413214C2 |
Использование: для неразрушающего контроля металлоконструкций. Сущность: заключается в том, что электромагнитно-акустический преобразователь содержит магнитную систему с расположенными на заданном расстоянии друг от друга группами магнитов в виде параллелепипедов с компланарными чередующимися полюсами, первый плоский индуктор, расположенный в параллельной полюсам магнитов плоскости на минимальном от них расстоянии, в пределах активной части витков которого перпендикулярно к ним лежат проекции полюсов магнитов на плоскость индуктора, и протектор, при этом в электромагнитно-акустический преобразователь введены полюсные наконечники из ферромагнитного материала и дополнительные магниты в форме параллелепипеда и второй плоский индуктор, а протектор выполнен из плоской электропроводящей шины в виде меандра, полюсные наконечники устанавливаются на полюса магнитов со стороны индуктора, дополнительные магниты устанавливаются по обе стороны полюсных наконечников так, чтобы полярность всех примыкающих к полюсным наконечникам полюсов была одинаковой, направление намагничивания дополнительных магнитов выбирается от одного полюсного наконечника к другому, второй индуктор располагается в параллельной полюсам магнитов плоскости на минимальном от полюсных наконечников расстоянии, активные части витков второго индуктора располагаются под разноименными полюсами магнитов, а витки меандра протектора ориентированы поперек витков первого плоского индуктора. Технический результат: улучшение отношения сигнал/шум. 1 ил.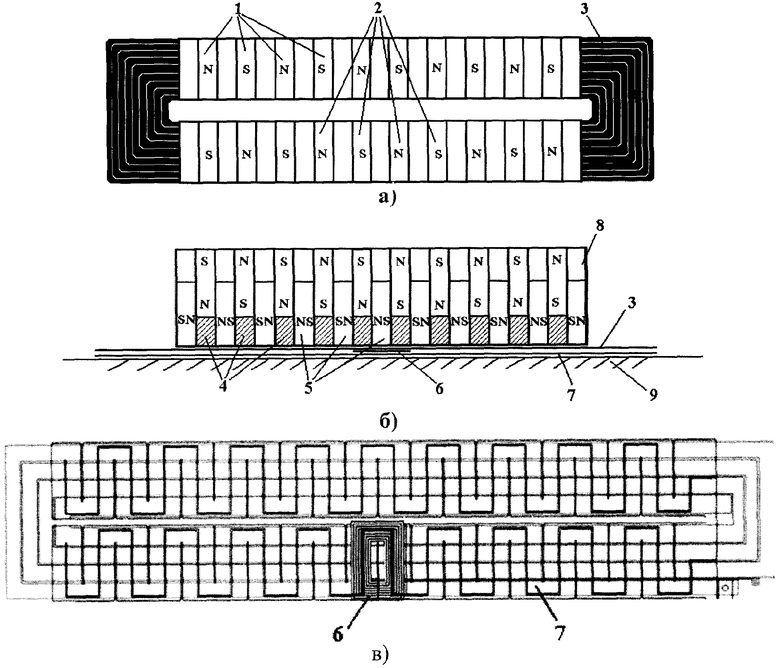
Электромагнитно-акустический преобразователь, содержащий магнитную систему с расположенными на заданном расстоянии друг от друга группами магнитов в виде параллелепипедов с компланарными чередующимися полюсами, первый плоский индуктор, расположенный в параллельной полюсам магнитов плоскости на минимальном от них расстоянии, в пределах активной части витков которого перпендикулярно им лежат проекции полюсов магнитов на плоскость индуктора, и протектор, отличающийся тем, что в него введены полюсные наконечники из ферромагнитного материала и дополнительные магниты в форме параллелепипеда и второй плоский индуктор, а протектор выполнен из плоской электропроводящей шины в виде меандра, при этом полюсные наконечники устанавливаются на полюса магнитов со стороны индуктора, дополнительные магниты устанавливаются по обе стороны полюсных наконечников так, чтобы полярность всех примыкающих к полюсным наконечникам полюсов была одинаковой, направление намагничивания дополнительных магнитов выбирается от одного полюсного наконечника к другому, второй индуктор располагается в параллельной полюсам магнитов плоскости на минимальном от полюсных наконечников расстоянии, активные части витков второго индуктора располагаются под разноименными полюсами магнитов, а витки меандра протектора ориентированы поперек витков первого плоского индуктора.
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU380364A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219539C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2237892C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2243550C1 |
| JP 59095454 A, 01.06.1984 | |||
| ЕР 0451375 А2, 16.10.1991. | |||

