Изобретение относится к устройству для неразрушающего контроля стенок ферромагнитных конструктивных элементов согласно ограничительной части п.1 формулы изобретения. Различные конструктивные элементы и, прежде всего, конструктивные элементы, эксплуатируемые вне помещений, т.е. на открытом воздухе, во избежание их выхода из строя в результате разрушения, деформации или нарушения герметичности необходимо периодически подвергать контролю на наличие возможных дефектов. Так, в частности, стенки труб, а также стенки различных емкостей или иных аналогичных конструкций, изготовленных из стали, часто подвержены коррозии. Подобные конструкции могут подвергаться, прежде всего, коррозионному растрескиванию под напряжением с образованием типичных трещин либо сеток трещин, распространяющихся с поверхности конструкционного материала вглубь него. Аналогичным образом трещины могут образовываться и по иным причинам, прежде всего при перегрузках. Помимо трещин в конструкциях могут возникать и иные дефекты, например очаги коррозии, обнаружение которых также представляет интерес при неразрушающем контроле.
Для неразрушающего контроля используют, например, ультразвуковые методы, позволяющие возбуждать акустические волны в стенке контролируемого конструкционного элемента снаружи с помощью электромагнитно-акустических преобразователей. Так называемый ЭМАП (электромагнитно-акустический преобразователь) позволяет бесконтактным путем и, прежде всего, даже без использования передающей среды возбуждать в подобной стенке акустические плоские волны. При этом обеспечивается возможность гораздо более простого и разнообразного по сравнению с механическим возбуждением с помощью пьезоэлектрических преобразователей возбуждения волн Лэмба, равно как и сдвиговых волн, поляризованных параллельно поверхности стенки. В дальнейшем подобные сдвиговые волны распространяются сравнительно плотными пучками в двух противоположных направлениях поперечно направлению поляризации, соответственно колебательного смещения. Такие сдвиговые волны, полезное возбуждение которых импульсами с приемлемой частотой должна обеспечивать высокочастотная индуктивная катушка, прежде всего, с геометрически точно настроенными расстояниями между проводниками, при этом приемлемые диапазоны частот и расстояния между проводниками индуктивной катушки варьируются также в функции толщины стенки, могут также иметь различную форму колебаний (моду), зависящую от расстояния по толщине стенки. Так, например, фазы колебаний сдвиговой волны нулевого порядка внутри стенки и у ее противоположной поверхности совпадают с фазой ее колебаний у наружной поверхности стенки, тогда как сдвиговая волна первого порядка образует узел колебаний в точке, находящейся в середине толщины стенки, а у ее противоположной поверхности колеблется в противофазе. Сдвиговые же волны еще более высокого порядка образуют внутри стенки несколько узлов колебаний. Колебания всех этих типов по-разному пригодны для обнаружения дефектов. Помимо этого, возбуждение колебаний передатчиками-преобразователями и соответственно восприятие колебаний приемниками-преобразователями должно происходить максимально четко и без помех.
Исходя из вышеизложенного в основу настоящего изобретения была положена задача разработать устройство для неразрушающего контроля ферромагнитных конструктивных элементов указанного в ограничительной части п.1 формулы изобретения типа, которое позволяло бы эффективно и надежно обнаруживать дефекты заданного вида, в том числе, в частности, и трещины или сетки трещин, которые возникают, например, вследствие коррозионного растрескивания под напряжением и которые распространяются от поверхности стенки вглубь нее и обычно имеют типичную ориентацию, без значительного усложнения при этом его конструкции и без несоразмерного увеличения расхода им энергии.
Эта задача в отношении устройства указанного в ограничительной части п.1 формулы изобретения типа решается согласно изобретению с помощью отличительных признаков п.1 формулы изобретения.
В процессе совершенствования уже известной методики неразрушающего контроля ферромагнитных конструктивных элементов с использованием возбуждаемых электромагнитным путем ультразвуковых сдвиговых волн было установлено, что в особых случаях, прежде всего при поиске трещин, которые проникают в стенку только на часть ее толщины, предпочтительно возбуждать сдвиговые волны более высокого порядка и тем самым исследовать, прежде всего, приповерхностную зону стенки. Сдвиговая волна уже первого порядка с уменьшающейся по мере ее распространения вглубь стенки амплитудой колебаний позволяет в процессе контроля исключить из анализа, с точки зрения измерительной техники, средний, внутренний участок стенки. В еще большей степени сказанное относится к сдвиговой волне второго порядка. Сканирование исследуемой стенки сдвиговыми волнами более высокого порядка позволяет повысить чувствительность к приповерхностным дефектам, при этом, однако, с увеличением порядка сдвиговых волн возрастает дисперсия мод, что приводит к рассеянию волновых пакетов. С учетом этого использование сдвиговой волны второго порядка является часто наилучшим компромиссом между выбором представляющей интерес глубины, на которую требуется контролировать стенку, надежностью и функциональностью передатчика-преобразователя и интенсивностью сигнала, достаточной для его надежного приема приемником-преобразователем.
Для электромагнитного возбуждения ультразвуковых волн необходимо предусмотреть намагничивание контролируемого участка стенки конструктивного элемента, для чего обычно используют один или несколько постоянных магнитов, которые, при необходимости совместно с ярмом, образуют магнитную цепь, замыкающуюся через стенку контролируемого конструктивного элемента. В этом случае можно наблюдать, что ориентирование траектории распространения возбуждаемых волн по направлению магнитной индукции инициирует появление множества колебаний, в том числе волн Лэмба, вследствие возникающих при этом сил Лоренца, однако в рассматриваемом случае представляющие особый интерес и формируемые за счет магнитострикционных эффектов горизонтально поляризованные сдвиговые волны более высокого порядка целесообразно возбуждать и принимать, прежде всего, тогда, когда направление траектории распространения ультразвуковых волн ориентировано под острым углом к направлению магнитной индукции. Этот угол между направлением траектории распространения ультразвуковых волн и направлением магнитной индукции предпочтительно должен составлять от 10 до 60°, а оптимально - от 20 до 50°.
В этом случае приемник-преобразователь предпочтительно размещать сбоку от траектории распространения ультразвуковых волн и направлять на расположенный на ней заданный контролируемый участок, чтобы он, с одной стороны, надежно принимал рассеянные или отраженные этим контролируемым участком сигналы, а с другой стороны, лишь в ограниченной степени принимал непосредственно передаваемые передатчиком-преобразрователем сигналы, которые исходя из характеристики приема вследствие ориентации приемника-преобразователя на контролируемый участок (а не на передатчик-преобразователь) достигают его в уже ослабленном виде.
Ориентацией приемника-преобразователя на заданный контролируемый участок, расположенный на траектории распространения ультразвуковых волн, которая в свою очередь соответствует ориентации передатчика-преобразователя, обусловлено расположение передатчика-преобразователя и приемника-преобразователя только под углом друг к другу. В случае трещин или иных аналогичных имеющих удлиненную или продолговатую форму дефектов, таких как трещины вследствие остаточных напряжений или их сетки, следует исходить не из диффузионного рассеяния достигающих их сдвиговых волн, а из отражения волн, при котором достигающая дефекта волна отражается от него в направлении, примерно зеркально-симметричном направлению ее распространения от передатчика-преобразователя, при этом приемник-преобразователь следует располагать при известной или преимущественно представляющей интерес ориентации дефектов под углом к ним, соответствующим углу отражения от них волн.
В отношении указанных соотношений между углами необходимо также отметить, что направление магнитной индукции не совпадает с основным направлением распространения дефектов. Направление намагничивания стенки конструктивного элемента как основы для индуктивного действия передатчиков-преобразователей и приемников-преобразователей вполне можно задавать и отличным от предполагаемого основного направления распространения дефектов. Вместе с тем, заданное условие, согласно которому траектория распространения сдвиговых волн должна располагаться под острым углом к направлению магнитной индукции, а передатчики-преобразователи и приемники-преобразователи должны взаимодействовать друг с другом, обеспечивая прием волн, отраженных от дефектов, может привести к вполне предпочтительному и простому выводу, согласно которому направление магнитной индукции может совпадать с основным направлением распространения дефектов или может быть ориентировано перпендикулярно ему.
Геометрические соотношения необходимо учитывать не только для обеспечения эффективного возбуждения сдвиговых волн и чувствительного и надежного контроля ферромагнитных стенок на наличие в них дефектов, но и в связи с тем, что ими определяется конструктивное исполнение устройств для неразрушающего контроля. Для рационального контроля стенок большой площади, например стенок крупных резервуаров или емкостей, необходимо использовать передвижные измерительные устройства со множеством плотно размещенных предлагаемых в изобретении устройств для неразрушающего контроля, которые обеспечивают сканирование контролируемых участков стенки сплошной полосой. Еще более важной областью применения предлагаемых в изобретении устройств является неразрушающий контроль трубопроводов, стенки которых по всей их окружности должны исследоваться на наличие дефектов при пропускании по трубам диагностического поршня (устройства для освидетельствования трубопроводов). В этом случае размерами трубы по ее окружности определяются размеры зоны действия диагностического поршня, полностью проконтролировать которую возможно только при использовании множества объединенных друг с другом в единую систему предлагаемых в изобретении устройств.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
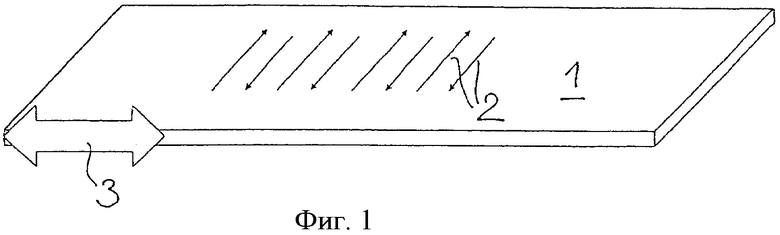
на фиг.1 - вид в аксонометрии панельной стенки с изображением стрелок, указывающих направления смещения частиц материала на поверхности стенки под действием сдвиговой волны,
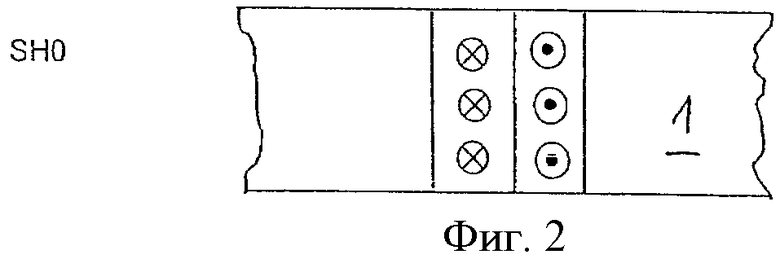
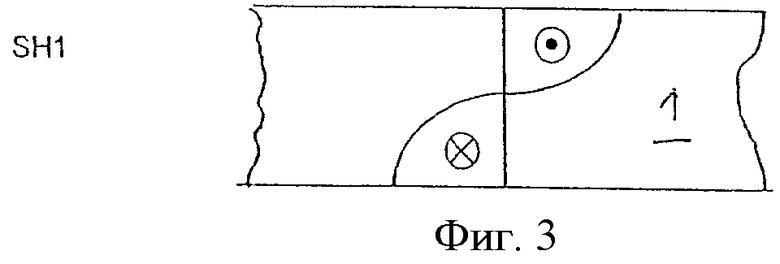
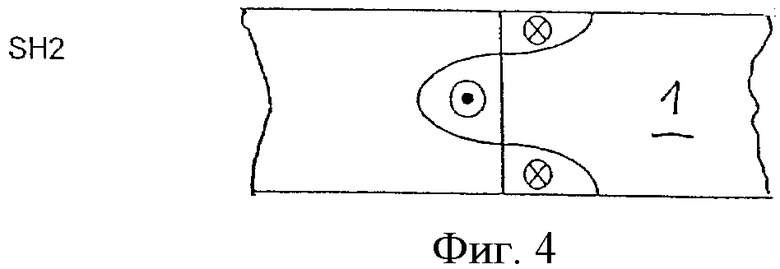
на фиг.2-4 - виды в продольном разрезе панели при прохождении через нее сдвиговых волн нулевого, первого, соответственно второго порядков,
на фиг.5-11 - схематичные виды передатчиков-преобразователей с указанием их ориентации относительно направления магнитной индукции,
на фиг.12-17 - схематичные виды выполненных по разным вариантам индуктивных катушек для ЭМАП.
На фиг.1 показана обозначенная позицией 1 панель (или соответствующий фрагмент стенки) с изображением попеременно ориентированных в противоположные стороны стрелок 2, указывающих направления смещения частиц материала под действием стоячей или затухающей сдвиговой волны в некоторый момент времени. Подобная сдвиговая волна может бесконтактным путем вводиться в панель 1 электромагнитно-акустическим преобразователем (ЭМАП) примерно на уровне расположения двунаправленной стрелки 3, которая указывает также два направления, в которых в материале пластины распространяются сдвиговые волны.
Как показано на фиг.2, 3 и 4, сдвиговые волны никоим образом не должны равномерно (синфазно) распространяться внутрь панели. Равномерно внутрь панели распространяется только сдвиговая волна нулевого порядка SH0 согласно фиг.2. Колебание же сдвиговой волны первого порядка SH1 согласно фиг.3 у одной поверхности панели противоположно по фазе ее колебанию у другой поверхности панели, поэтому в средней плоскости панели образуется узел колебаний. Уже по одной этой причине частицы материала панели внутри нее принимают меньшее участие в колебаниях, чем на ее поверхности.
Горизонтальная сдвиговая волна второго порядка SH2 с двумя узлами колебаний оказывает еще большее влияние на участие приповерхностных частиц материала в ее колебаниях, тем более что колебания у поверхности панели имеют крайне важное значение для формирования принимаемых сигналов, которые можно принять снаружи за счет индуктивной связи. Сказанное представляет особый интерес для обнаружения трещин и иных аналогичных дефектов, распространяющихся вглубь панели или стенки снаружи, например, вследствие коррозионного растрескивания под напряжением. Особый интерес представляют дефекты с ограниченной глубиной их проникновения в панель или стенку и гораздо надежнее обнаруживаются с помощью горизонтальных сдвиговых волн более высокого порядка, чем с помощью горизонтальной сдвиговой волны нулевого порядка. Таким образом, под "сдвиговыми волнами более высокого порядка" в данном случае подразумеваются сдвиговые волны с порядком выше нулевого (SH0).
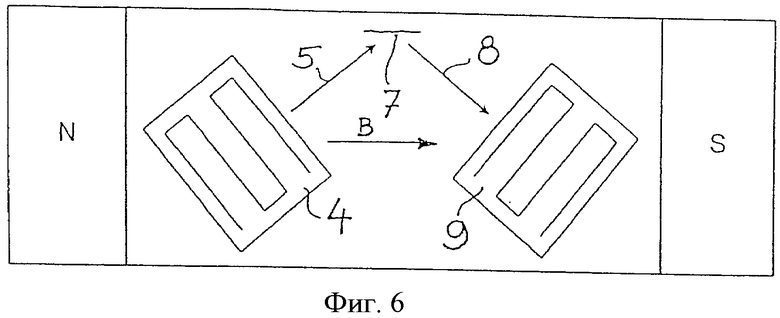
Необходимым условием возбуждения подобных сдвиговых волн обычно является намагничивание ферромагнитной стенки, которое в общем случае представляет собой статическое намагничивание магнитным полем магнитной цепи с одним или несколькими сильными постоянными магнитами, создаваемый которыми магнитный поток вводится, при необходимости с использованием дополнительно магнитных ярм и полюсных наконечников, в стенку в ее двух отстоящих друг от друга местах. Подобное намагничивание ферромагнитной стенки условно показано на фиг.5 стрелкой В для магнитной индукции, обозначающей равномерное и равнонаправленное намагничивание в панели, поверх которой расположен передатчик-преобразователь 4, предназначенный для возбуждения в панели распространяющейся в направлении стрелки 5 (и в противоположном направлении) сдвиговой волны второго порядка SH2.
Эффективное возбуждение сдвиговых волн предполагает наличие соответствующей геометрической формы у обычно меандрообразной индуктивной катушки 6 с оптимизированным расстоянием между образующими ее проводниками, а также формирование ею возбуждающего сдвиговую волну сигнала, прежде всего, с соответствующим образом подобранной высокой частотой, которая может находиться, например, в диапазоне от 10 кГц до 5 МГц и конкретное значение которой определяется порядком возбуждаемой сдвиговой волны и толщиной стенки.
При создании изобретения было установлено также, что излучение сдвиговой волны в направлении стрелки 5 имеет особое значение, прежде всего, для эффективности ее возбуждения, а также для подавления или ослабления других волн, которые из-за наложения создают помехи при контроле. При этом сдвиговую волну наиболее предпочтительно излучать в направлении стрелки 5 под острым углом α к обозначенному стрелкой В направлению магнитной индукции. При излучении сдвиговых волн передатчиком-преобразователем 4 в направлении магнитной индукции по стрелке В формируется множество других волн, прежде всего волн Лэмба, тогда как интенсивность горизонтальных сдвиговых волн второго порядка SH2 достигает максимума при их излучении в направлении, образующем с направлением магнитной индукции острый угол, лежащий в диапазоне от 20 до 50°, а при излучении в более широком диапазоне острых углов, составляющем от 10 до 60°, хотя и имеет несколько меньшую величину, тем не менее, все еще остается достаточно высокой.
Как наглядно показано на фиг.6, магнитная индукция в статическом магнитном поле направлена по стрелке В от северного N и к южному S магнитному полюсу, а передатчик-преобразователь 4 излучает горизонтальные сдвиговые волны в направлении стрелки 5. В показанном на чертеже примере сдвиговые волны достигают отходящую от поверхности трещину 7, которая имеет в основном прямолинейную форму и при этом проникает также вглубь контролируемой стенки конструктивного элемента, но лишь на некоторую часть ее толщины. Эта сдвиговая волна, представляющая собой сдвиговую волну более высокого порядка с соответственно преимущественным ее распространением в приповерхностной зоне контролируемой стенки, по достижении трещины претерпевает значительное отражение от нее в направлении стрелки 8. Отраженная волна принимается приемником-преобразователем 9, который, в принципе, может быть выполнен аналогично передатчику-преобразователю 4, и передается далее в соответствующие измерительные и регистрирующие устройства. Тем самым принимаемые приемником-преобразователем 9 сигналы позволяют на их основании описать параметры трещины. При этом приемник-преобразователь 9 ориентирован перпендикулярно стрелке 8, указывающей направление распространения отраженной сдвиговой волны, которое в соответствии с общими принципами отражения волн располагается зеркально-симметрично направлению распространения исходной сдвиговой волны по стрелке 5 относительно перпендикуляра, проведенного к основному направлению распространения трещины 7.
В рассматриваемом примере предполагается, что трещина 7 проходит примерно параллельно обозначенному стрелкой В направлению магнитной индукции, под тем же острым углом α к которой в результате распространяется и отраженная волна в направлении стрелки 8. В этом отношении и для приемника-преобразователя 9 создаются оптимальные физические условия приема волн.
На фиг.7 схематично показана система, в которой направление статического намагничивания также обозначено стрелкой В и которая дополнена еще одним приемником-преобразователем, а именно эталонным преобразователем 10, который выполнен аналогично приемнику-преобразователю 9, но расположен напротив передатчика-преобразователя 4 на таком же удалении от него в направлении распространения сдвиговых волн по стрелке 5, что и передатчик-преобразователь 9, и ориентирован относительно передатчика-преобразователя 4 таким образом, что он полностью или частично принимает проходящие сдвиговые волны. Получаемый на основании их сигнал тем самым представляет собой для приемника-преобразователя 9 опорный сигнал, на который можно нормировать принимаемый сигнал при отсутствии отражения, т.е. на бездефектном участке стенки, и по которому при приеме приемником-преобразователем 9 отраженного сигнала определяется также его интенсивность. Таким путем независимо от зависящего при определенных условиях от особенностей материала, а также переменного качества ввода сдвиговых волн передатчиком-преобразователем 4 и независимо от эффективности приема волн приемником-преобразователем 9 получают основную величину для анализа геометрии выявленного дефекта.
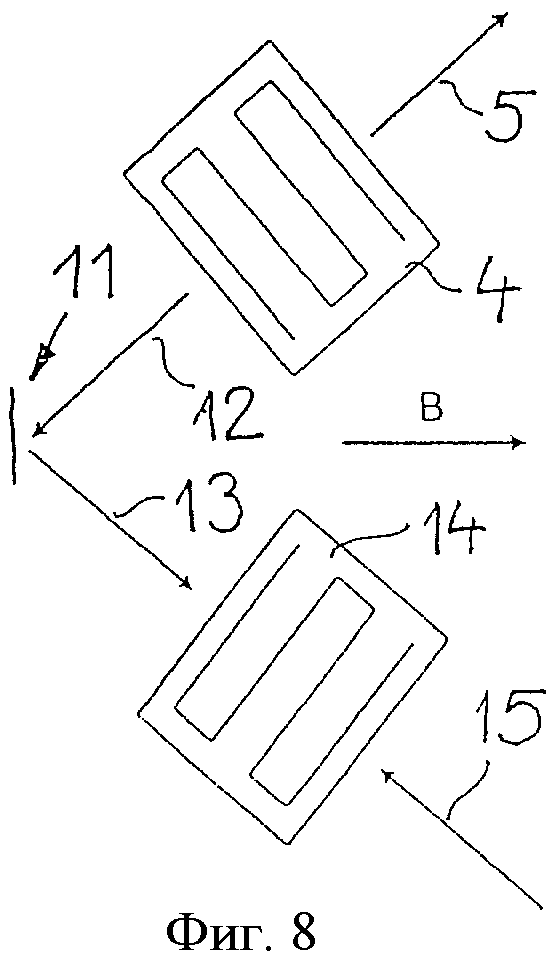
На фиг.8 показана система, которую можно использовать в дополнение к рассмотренной выше и показанной на фиг.7 измерительной системе или же в качестве альтернативы ей для контроля стенок на наличие в них поперечных трещин. В данном случае речь идет о дефектах, ориентированных примерно перпендикулярно направлению намагничивания (направлению стрелки В, указывающей направление магнитной индукции). Подобную трещину 11 можно обнаружить при распространении сформированной сдвиговой волны во втором направлении, т.е. в направлении стрелки 12, противоположном направлению стрелки 5, и последующем ее отражении от трещины в направлении стрелки 13. Такая отраженная волна может приниматься приемником-преобразователем 14, который установлен в приемлемом положении и соответствующим образом ориентирован относительно отраженной волны, распространяющейся по стрелке 13. В этом случае также образуется оптимальный угол α приема отраженной волны относительно направления намагничивания.
Во взаимодействии с несколькими передатчиками-преобразователями приемник-преобразователь 14 (и соответственно любой другой приемник-преобразователь) может принимать сдвиговые волны, поступающие с двух противоположных направлений, как это указано стрелкой 15. Тем самым должна учитываться конструкция множества имеющих компактное исполнение передатчиков-преобразователей и приемников-преобразователей, которые позволяют за один цикл широким сплошным фронтом исследовать на наличие дефектов полосу на плоской стенке или поперечное сечение трубы.
На фиг.7 и 8 показано далее, что при определенной ориентации и определенном расположении преобразователей относительно друг друга можно обнаруживать трещины, распространяющиеся в направлении магнитного поля, и трещины, распространяющиеся преимущественно поперечно направлению магнитного поля. Тем самым при необходимости выявления, например, продольных трещин в трубе соответственно на ней возможно также намагничивание в поперечном направлении (в окружном направлении), позволяющее в этом случае обнаруживать продольные трещины и при ином взаимном расположении преобразователей.
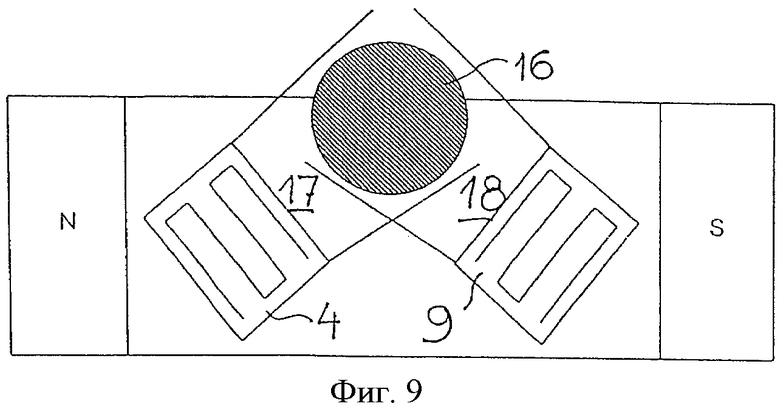
На фиг.9-11 показано, каким образом можно обеспечить непрерывный контроль ("сканирование") стенки ферромагнитного конструктивного элемента, прежде всего стенки трубы, используя в комбинации несколько предлагаемых в изобретении устройств. На фиг.9 показана уже рассмотренная выше со ссылкой на фиг.6 измерительная система, в которой между северным N и южным S магнитными полюсами в стенке конструктивного элемента создается однородное магнитное поле, в котором между этими магнитными полюсами расположены передатчик-преобразователь 4 и приемник-преобразователь 9. Оба преобразователя направлены на контролируемый участок 16, который требуется проверить на наличие на нем возможных дефектов. Для этого передатчиком-преобразователем 4 в (требуемом) направлении излучаются сдвиговые волны, которые на траектории 17 их распространения должны обладать заданной полезной энергией, передаваемой с четкой направленностью, хотя и с определенным расширением от передатчика-преобразователя 4 в сторону контролируемую участка 16 и далее за него.
Для приемника-преобразователя 9 также можно выделить идущий со стороны контролируемого участка 16 участок с более или менее выраженной направленностью, который в показанном на чертеже примере обозначен лишь в виде участка 18, распространяющиеся вдоль которого сдвиговые волны, которые при определенных условиях являются отраженными, достаточно четко принимаются приемником-преобразователем. Оба ЭМАП-преобразователя имеют, таким образом, диаграммы направленности, характеризующиеся высокой направленностью сдвиговых волн, называемой "траекторией" их распространения. При этом путь распространения акустических волн должен быть максимально коротким с целью минимизировать геометрические потери на их распространение.
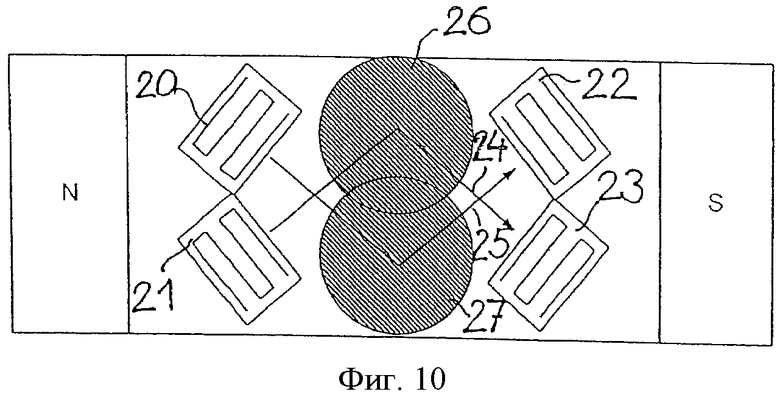
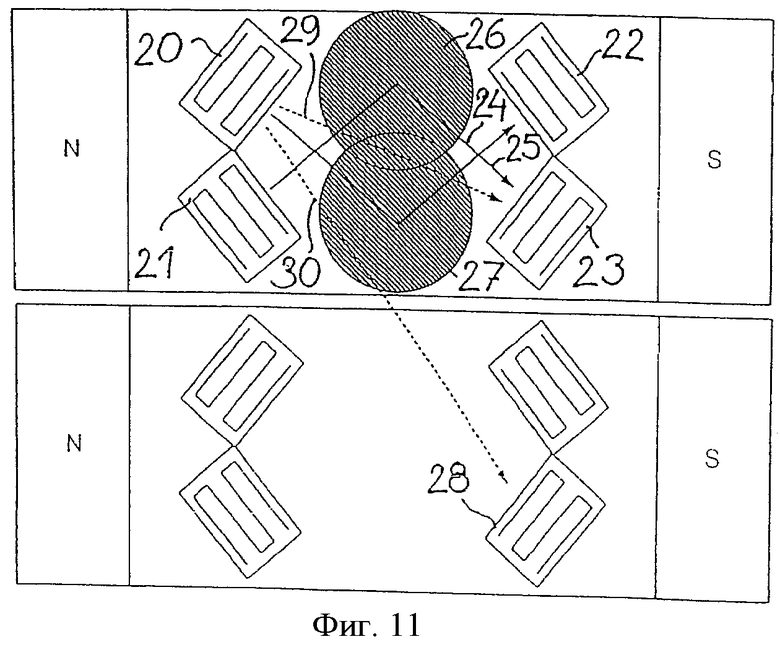
В показанном на фиг.10 варианте в статическом магнитном поле между обозначенными на чертеже северным N и южным S магнитными полюсами расположены два передатчика-преобразователя 20, 21 и два приемника-преобразователя 22, 23 таким образом, что они попарно взаимодействуют между собой на заданных пересекающихся линиях 24, 25 отражения волн, а именно на двух контролируемых участках 26, 27, которые при некотором их взаимном наложении совместно перекрывают всю ширину магнитных полюсов. В соответствии с этим перемещение соответствующего устройства в направлении магнитного поля приводит к перекрытию всей ширины магнитных полюсов контролируемыми участками 26, 27. При этом обеспечиваемое магнитными полюсами намагничивание используется двумя работающими перекрестно относительно друг друга контрольными устройствами.
На фиг.11 показана система, которая состоит из нескольких постоянных магнитов с соответствующими изображенными на фиг.10 парами контрольных устройств и в которой между приемниками-преобразователями и передатчиками-преобразователями, которые с точки зрения приема отраженных волн функционально не связаны друг с другом, могут возникать перекрестные помехи. Этот эффект представляет особый интерес с точки зрения техники контроля, когда, например, формируемые передатчиком-преобразователем 20 сигналы принимаются приемником-преобразователем 23, который исходно ориентирован на прием отраженных волн, образующихся в результате отражения сигналов, посылаемых передатчиком-преобразователем 21. Аналогичным образом и приемник-преобразователь 28 может принимать проходящие длинный путь сигналы, излучаемые передатчиком-преобразователем 20. Подобные принимаемые сигналы, траектории распространения которых обозначены пунктирными стрелками 29, 30, должны анализироваться на основании времени их распространения и степени затухания. При контроле снабженных покрытием или оболочкой плит или труб именно на основании степени затухания сигналов можно получать информацию о состоянии покрытия, соответственно оболочки. На участках без покрытия или же на участках, на которых в результате поверхностной коррозии или в результате подповерхностной коррозии и ее распространения от поверхности ферромагнитной стенки вглубь нее произошло разрушение или отслоение покрытия, затухание сдвиговых волн происходит в существенно меньшей степени в пересчете на длину пройденного ими пути и тем самым свидетельствует о дефектах покрытия.
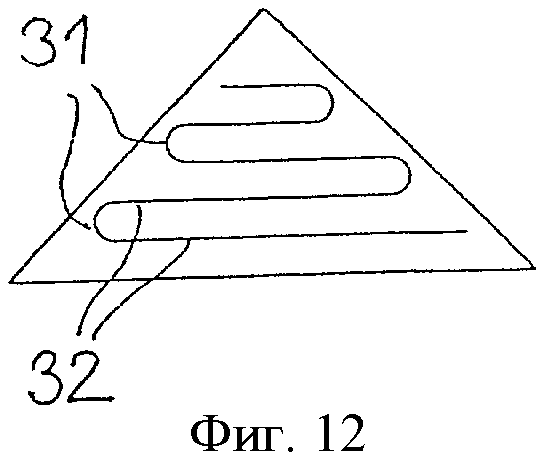
Электромагнитно-акустическое возбуждение сдвиговых волн обеспечивается передатчиками-преобразователями, которые имеют известную показанную на фиг.5-11 форму, т.е. состоят из ряда меандрообразных витков. Форму преобразователей необходимо согласовывать с требуемыми параметрами сдвиговых волн. При этом параллельные длинные участки проводников, образующих меандрообразные витки, задают основное направление, которое соответствует также направлению распространения сдвиговых волн. На фиг.12-17 показаны различные варианты выполнения соответствующих индуктивных катушек. Помимо этого, важное значение имеет эффективное использование пространства в пределах магнитного поля, обеспечиваемое за счет коротких путей распространения излученных и отраженных акустических волн.
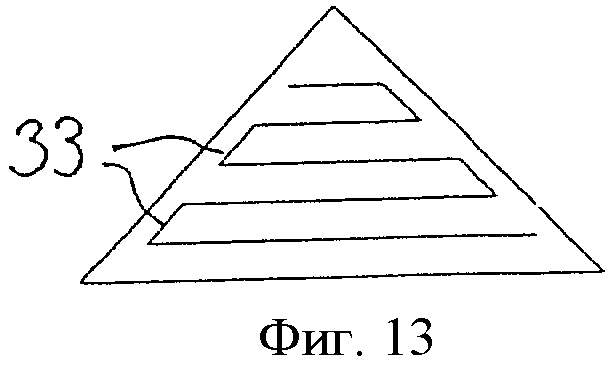
Так, например, индуктивные катушки в показанных на фиг.12-14 вариантах их выполнения следует размещать на поверхности в форме прямоугольного треугольника. Выполнение индуктивных катушек такой формы позволяет компактно размещать передатчики-преобразователи и приемники-преобразователи в угловых частях показанного, например, на фиг.6 пространства между северным и южным магнитными полюсами и задавать траекторию распространения сдвиговых волн, а также отраженных волн под оптимальным острым углом к направлению магнитной индукции, равным примерно 45°. Выполнение переходов 31 от одного участка проводника 32 к другому скругленной формы, как в показанном на фиг.12 варианте, позволяет избежать побочного излучения сдвиговых волн в каком-либо ином направлении, тогда как выполнение переходов 33 прямолинейной формы, как в показанном на фиг.13 варианте, обеспечивает побочное излучение сдвиговых волн в поперечном таким прямолинейным переходам 33 направлении, каковые сдвиговые волны могут при необходимости использоваться для вспомогательных измерений. Так, например, таким путем при проверочном прохождении диагностического поршня по трубе в ее продольном направлении можно возбуждать ультразвуковые плоские волны и принимать отраженные волны, которые могут сигнализировать, прежде всего, об обнаружении сварных швов в трубе при определении их местоположения.
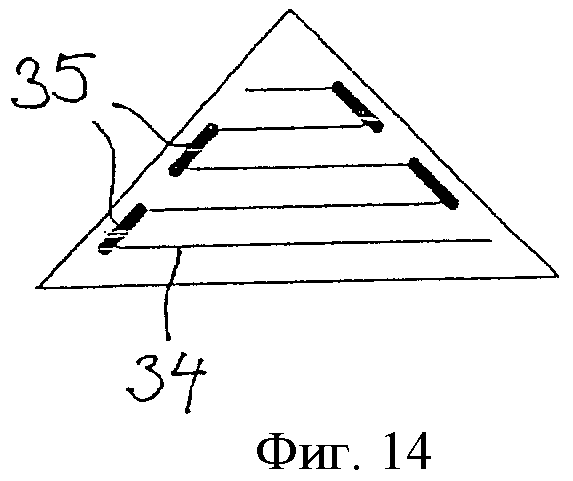
В показанном на фиг.14 варианте переходы 35 между отдельными витками проводника 34 выполнены в виде уширенных переходов, уширенной формой которых обусловлена меньшая плотность протекающего через них тока и меньшая энергия электромеханического возбуждения сдвиговых волн, а тем самым и подавление побочного излучения сдвиговых волн аналогично скругленным переходам 31.
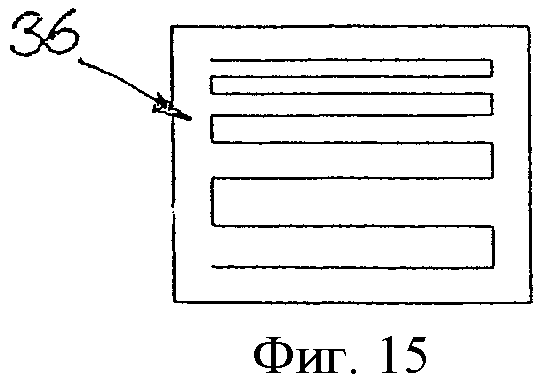
На фиг.15-17 показаны ЭМАП-катушки с петлевидными витками, имеющими в целом форму прямоугольников. При выполнении катушки с показанной на фиг.15 геометрией витков проводника 36 можно обеспечить сжатие импульсов, монотонно изменяя расстояние между длинными участками проводника, а тем самым и длину волны (сжатие импульсов с использованием линейной частотной модуляции), поскольку скорость распространения сдвиговых волн более высокого порядка является функцией длины волны. При достаточной ширине полосы возбуждения можно генерировать волновой пакет, который вследствие дисперсии сходится с увеличением при этом амплитуды. Это явление наиболее целесообразно использовать, прежде всего, при неразрушающем контроле методом отраженных импульсов для определения времени распространения эхо-сигналов в качестве меры удаления отражающего волны дефекта от передатчиков-преобразователей и приемников-преобразователей.
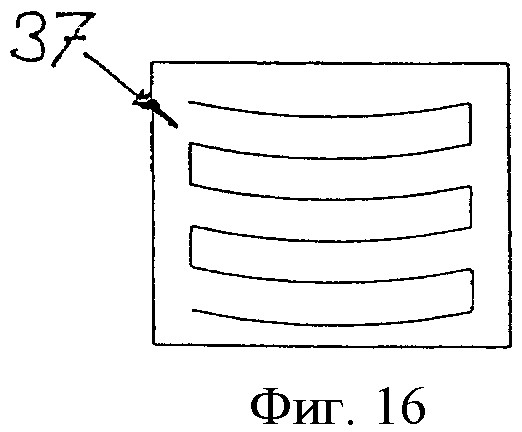
У показанной на фиг.16 индуктивной катушки образующий ее проводник 36 расположен витками, имеющими изогнутую аналогично вогнутому зеркалу форму, которой обусловлено уменьшение угла раствора пучка звуковых волн. В результате при распространении сдвиговых волн вверх в плоскости чертежа по фиг.16 удается сузить границы контролируемой зоны и повысить точность ее локализации. В противоположном же направлении распространения сдвиговых волн происходит их дефокусировка, позволяющая расширить границы контролируемой зоны.
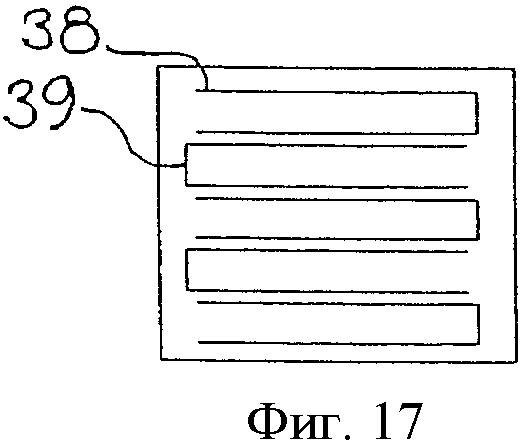
У показанной на фиг.17 индуктивной катушки ее витки образованы множеством отдельных проводников 38, 39, индивидуально настраиваемых за счет варьирования расстояния между ними. Подобная индуктивная катушка позволяет путем сдвига фаз между отдельными возбуждаемыми сдвиговыми волнами регулировать характеристику их излучения (по типу фазированной антенной решетки), при этом для оптимизации формы акустической волны можно использовать амплитудную модуляцию (эффект аподизации, эффект коррекции характеристики направленности методом экранирования).
Подобные индуктивные катушки возбуждаются, например, на частоте 500 кГц и генерируют последовательность из 15 импульсов, которыми затем в контролируемом материале могут возбуждаться ультразвуковые волны, в том числе, в частности, и рассматриваемые в настоящем описании сдвиговые волны более высокого порядка. Короткие последовательности импульсов в этом частотном диапазоне позволяют работать с тактовой частотой в нескольких сотен герц без возникновения при этом перекрестных помех при взаимодействии многих пространственно расположенных близко друг к другу контрольных устройств. Благодаря этому даже при использовании таких измерительных устройств, как, например, диагностические поршни, перемещающиеся в трубах со скоростью в несколько метров в секунду, циклы измерения можно повторять со столь высокой частотой, что и в направлении перемещения подобного диагностического поршня необследованным не остается ни один участок трубы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля трубопровода с использованием электромагнитно-акустической технологии | 2022 |
|
RU2790942C1 |
| СПОСОБ КОНТРОЛЯ ТРУБОПРОВОДА С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОЙ ТЕХНОЛОГИИ | 2021 |
|
RU2794338C2 |
| СПОСОБ АКУСТИЧЕСКОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2825120C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| НЕЛИНЕЙНЫЙ МОДУЛЯЦИОННЫЙ СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2799241C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2343475C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Электромагнитно-акустический преобразователь | 1989 |
|
SU1684656A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2206888C1 |
| Способ определения подверженности металлопроката изгибу и устройство для его осуществления | 2021 |
|
RU2780147C1 |

Использование: для неразрушающего контроля стенок ферромагнитных конструктивных элементов. Сущность заключается в том, что в устройстве для неразрушающего контроля стенок ферромагнитных конструктивных элементов с использованием ультразвуковых волн, прежде всего сдвиговых волн, возбуждаемых высокочастотной индуктивной катушкой на участке стенки, намагниченном в заданном направлении (В) магнитной индукции, распространяющихся по траектории, задаваемой ориентацией индуктивной катушки, являющейся передатчиком-преобразователем, и принимаемых расположенной на расстоянии от передатчика-преобразователя, по меньшей мере, одной индуктивной катушкой, являющейся приемником-преобразователем, характеристики преобразователей и определяемая в зависимости от толщины стенки высокая частота рассчитаны на возбуждение горизонтальных сдвиговых волн с порядком выше нулевого, а направление траектории распространения ультразвуковых волн ориентировано под острым углом α к направлению (В) магнитной индукции, причем приемник-преобразователь размещен сбоку от траектории распространения ультразвуковых волн и направлен на расположенный на ней заданный контролируемый участок. Технический результат: обеспечение возможности эффективно и надежно обнаруживать дефекты заданного вида без значительного усложнения конструкции устройства и без значительного увеличения расхода энергии устройством. 39 з.п. ф-лы, 17 ил.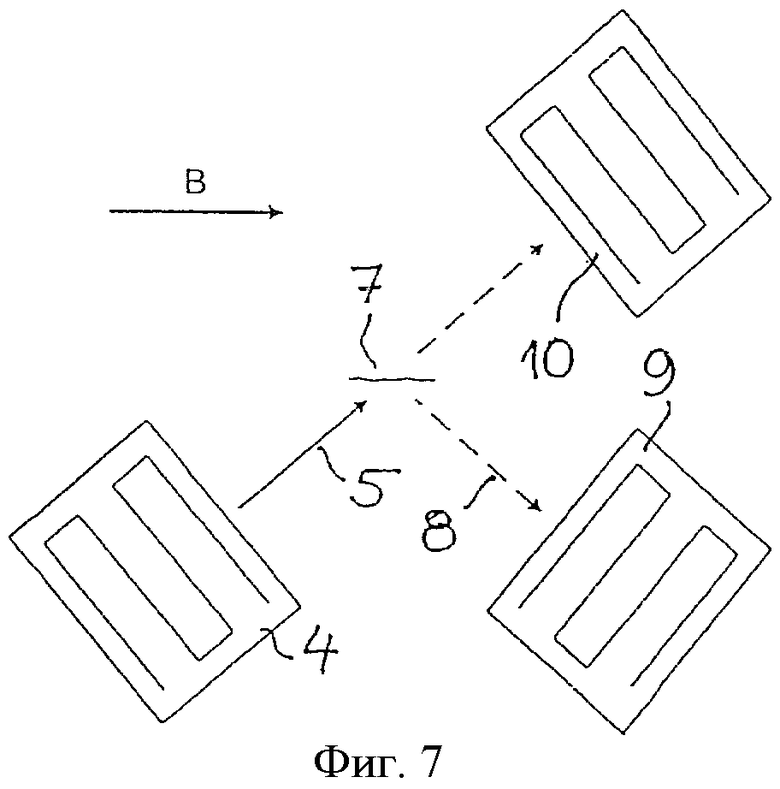
1. Устройство для неразрушающего контроля стенок ферромагнитных конструктивных элементов, таких как стенки труб или панельные стенки, на наличие трещин (7, 11) или иных имеющих удлиненную или продолговатую форму дефектов с использованием ультразвуковых волн, прежде всего сдвиговых волн, возбуждаемых высокочастотной индуктивной катушкой (4, 20, 21) на участке стенки, намагниченном в заданном направлении (В) магнитной индукции, распространяющихся по задаваемой ориентацией индуктивной катушки в качестве передатчика-преобразователя (4, 20, 21) траектории (17) и принимаемых расположенной на расстоянии от передатчика-преобразователя (4, 20, 21) по меньшей мере одной индуктивной катушкой в качестве приемника-преобразователя (9, 10, 14, 22, 23, 28), отличающееся тем, что характеристики преобразователей (4, 9, 10, 14, 20, 21, 22, 23, 28) и определяемая в зависимости от толщины стенки высокая частота рассчитаны на возбуждение горизонтальных сдвиговых волн с порядком выше нулевого, направление траектории (17) распространения ультразвуковых волн ориентировано под острым углом α к направлению (В) магнитной индукции, а приемник-преобразователь (9, 22, 23) размещен сбоку от траектории (17) распространения ультразвуковых волн и направлен на расположенный на ней заданный контролируемый участок (16, 26, 27).
2. Устройство по п.1, отличающееся тем, что указанный острый угол α составляет от 20 до 60°.
3. Устройство по п.2, отличающееся тем, что указанный острый угол α составляет от 30 до 50°.
4. Устройство по одному из пп.1-3, отличающееся тем, что передатчик-преобразователь (4, 20, 21) и приемник-преобразователь (9, 22, 23) ориентированы относительно установленного для дефектов основного их направления по углу падения и отражения ультразвуковых волн.
5. Устройство по п.4 для неразрушающего контроля труб, отличающееся тем, что стенка трубы намагничена параллельно ее оси, к которой передатчики-преобразователи (4, 20, 21) и приемники-преобразователи (9, 22, 23) ориентированы под одинаковыми, но имеющими противоположный знак углами.
6. Устройство по п.4 для неразрушающего контроля труб, отличающееся тем, что стенка трубы намагничена в ее окружном направлении, к которому передатчики-преобразователи и приемники-преобразователи ориентированы под одинаковыми, но имеющими противоположный знак углами.
7. Устройство по пп.1, 2, 3, 5 или 6, отличающееся тем, что на траектории (17) распространения ультразвуковых волн за контролируемым участком (16) расположен дополнительный приемник-преобразователь в качестве эталонного преобразователя (10), направленный на передатчик-преобразователь (4).
8. Устройство по п.4, отличающееся тем, что на траектории (17) распространения ультразвуковых волн за контролируемым участком (16) расположен дополнительный приемник-преобразователь в качестве эталонного преобразователя (10), направленный на передатчик-преобразователь (4).
9. Устройство по пп.1, 2, 3, 5, 6 или 8, отличающееся тем, что траектория (17) распространения ультразвуковых волн по обе стороны от передатчика-преобразователя (4) используется для контроля на наличие дефектов, а сбоку от траектории (17) распространения ультразвуковых волн расположен второй приемник-преобразователь (14), направленный на второй контролируемый участок.
10. Устройство по п.4, отличающееся тем, что траектория (17) распространения ультразвуковых волн по обе стороны от передатчика-преобразователя (4) используется для контроля на наличие дефектов, а сбоку от траектории (17) распространения ультразвуковых волн расположен второй приемник-преобразователь (14), направленный на второй контролируемый участок.
11. Устройство по п.7, отличающееся тем, что траектория (17) распространения ультразвуковых волн по обе стороны от передатчика-преобразователя (4) используется для контроля на наличие дефектов, а сбоку от траектории (17) распространения ультразвуковых волн расположен второй приемник-преобразователь (14), направленный на второй контролируемый участок.
12. Устройство по пп.1, 2, 3, 5, 6 или 8, отличающееся тем, что разнонаправленно пересекающиеся траектории распространения ультразвуковых волн, излучаемых и соответственно принимаемых используемыми попарно передатчиками-преобразователями (20, 21) и приемниками-преобразователями (22, 23), определяют границы вплотную примыкающих друг к другу контролируемых участков (26, 27).
13. Устройство по п.4, отличающееся тем, что разнонаправленно пересекающиеся траектории распространения ультразвуковых волн, излучаемых и соответственно принимаемых используемыми попарно передатчиками-преобразователями (20, 21) и приемниками-преобразователями (22, 23), определяют границы вплотную примыкающих друг к другу контролируемых участков (26, 27).
14. Устройство по п.7, отличающееся тем, что разнонаправленно пересекающиеся траектории распространения ультразвуковых волн, излучаемых и соответственно принимаемых используемыми попарно передатчиками-преобразователями (20, 21) и приемниками-преобразователями (22, 23), определяют границы вплотную примыкающих друг к другу контролируемых участков (26, 27).
15. Устройство по п.12, отличающееся тем, что передатчики-преобразователи (20) связаны с приемниками-преобразователями (23, 28) для измерения продолжительности времени распространения ультразвуковых волн и степени их затухания.
16. Устройство по п.13 или 14, отличающееся тем, что передатчики-преобразователи (20) связаны с приемниками-преобразователями (23, 28) для измерения продолжительности времени распространения ультразвуковых волн и степени их затухания.
17. Устройство по пп.1, 2, 3, 5, 6, 8, 10, 11, 13, 14 или 15, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
18. Устройство по п.4, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
19. Устройство по п.7, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
20. Устройство по п.9, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
21. Устройство по п.12, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
22. Устройство по п.16, отличающееся тем, что оно объединено с такими же устройствами в систему, контролирующую без пропусков переходящие один в другой контролируемые участки (26, 27).
23. Устройство по п.17, отличающееся тем, что оно расположено на окружной периферии диагностического поршня, предназначенного для неразрушающего контроля стенок труб.
24. Устройство по одному из пп.18-22, отличающееся тем, что оно расположено на окружной периферии диагностического поршня, предназначенного для неразрушающего контроля стенок труб.
25. Устройство по пп.1, 2, 3, 5, 6, 8, 10, 11, 13, 14, 15, 18, 19, 20, 21, 22 или 23, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
26. Устройство по п.4, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
27. Устройство по п.7, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
28. Устройство по п.9, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
29. Устройство по п.12, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
30. Устройство по п.16, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
31. Устройство по п.17, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
32. Устройство по п.24, отличающееся тем, что образующие индуктивную катушку проводники расположены меандрообразно с параллельным расположением множества их длинных участков (32).
33. Устройство по п.25, отличающееся тем, что длинные параллельные участки проводников соединены между собой дугообразными переходами (31).
34. Устройство по одному из пп.26-32, отличающееся тем, что длинные параллельные участки проводников соединены между собой дугообразными переходами (31).
35. Устройство по п.25, отличающееся тем, что длинные параллельные участки образующих индуктивную катушку (36) проводников отстоят друг от друга на разных, монотонно изменяющихся в порядке их следования один за другим расстояниях.
36. Устройство по одному из пп.26-32, отличающееся тем, что длинные параллельные участки образующих индуктивную катушку (36) проводников отстоят друг от друга на разных, монотонно изменяющихся в порядке их следования один за другим расстояниях.
37. Устройство по п.25, отличающееся тем, что длинные параллельные участки образующих индуктивную катушку проводников (37) имеют однонаправленно изогнутую форму.
38. Устройство по одному из пп.26-32, отличающееся тем, что длинные параллельные участки образующих индуктивную катушку проводников (37) имеют однонаправленно изогнутую форму.
39. Устройство по п.25, отличающееся тем, что длинные параллельные участки проводников образуют несколько их отдельно управляемых витков (38, 39).
40. Устройство по одному из пп.26-32, отличающееся тем, что длинные параллельные участки проводников образуют несколько их отдельно управляемых витков (38, 39).
| US 5537876 A, 23.07.1996 | |||
| US 4301684 A, 24.11.1981 | |||
| US 4100809 A, 18.07.1978 | |||
| НЕЛИНЕЙНЫЙ УЛЬТРАЗВУКОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ТРЕЩИН И ИХ МЕСТОПОЛОЖЕНИЙ В ТВЕРДОМ ТЕЛЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2280863C1 |
| СПОСОБ КОНТРОЛЯ ОДНОРОДНОСТИ МЕХАНИЧЕСКИХ СВОЙСТВ ЛИСТОВОГО, СОРТОВОГО ПРОКАТА И ТРУБ | 2003 |
|
RU2258217C2 |

