Изобретение относится к области измерительной техники и может быть использовано в пассивной радиолокации, в том числе в средствах радиотехнической разведки.
Известен моноимпульсный радиолокатор, содержащий 4 приемные антенны [1]. Выходы всех антенн подключены к суммарно-разностному устройству, образующему суммарный канал, разностный канал по азимуту и разностный канал по углу места.
С помощью вышеуказанного устройства реализуется амплитудный моноимпульсный способ пеленгации радиолокационных целей, заключающийся в формировании в каждой из угломерных плоскостей (азимутальной и угломестной) двух пересекающихся на уровне половинной мощности диаграмм направленности антенн, формирующих равносигнальное направление, последующей суммарно-разностной обработке принятых сигналов, определении пеленга по полученным дискриминаторным характеристикам.
Амплитудный моноимпульсный способ пеленгации реализуется не в передающем устройстве, а в приемных устройствах. На передающее устройство возлагается лишь функция излучения зондирующего сигнала. В связи с этим амплитудный моноимпульсный способ пеленгации и устройства, его реализующие, нашли применение в пассивной радиолокации, в том числе в средствах радиотехнической разведки (РТР). Однако при построении устройств, реализующих амплитудный моноимпульсный способ пеленгации, в активных и пассивных системах радиолокации имеются принципиальные различия. В активных системах ожидаемый отраженный сигнал известен, по крайней мере, от «точечной» цели. В таком случае оптимальная обработка сигнала может быть сведена к вычислению корреляционного интеграла вида
где Z - значение корреляционной функции,
x(t) - принимаемый сигнал,
u(t) - опорный сигнал,
Т - период.
При практической реализации оптимальной обработки сигнала строят оптимальный фильтр [1, с.27]. В этом случае точность определения пеленга зависит не от пиковой мощности, а от энергии сигнала.
Иначе обстоит дело в пассивной радиолокации, поскольку обработка информации проводится при априорной неопределенности частотно-временной структуры сигналов источников радиоизлучения (оптимальный фильтр, применяемый в активных РЛС, известными методами невозможно построить). В этом случае точность определения пеленга зависит не от энергии сигнала, а от его пиковой мощности. В современных станциях РТР получают хорошие качественные показатели пеленгации источников радиоизлучения на основе прямого применения способа амплитудной моноимпульсной пеленгации. Это объясняется тем, что принимаемые сигналы, например, излучаемые бортовыми РЛС, имеют достаточно большую пиковую мощность.
В конце прошлого столетия созданы малозаметные РЛС (МРЛС). В отличие от традиционных радиолокационных станций их шумоподобные сигналы имеют большую длительность и малую пиковую мощность. Работает МРЛС почти в непрерывном режиме.
Недостаток известного устройства [1], реализующего амплитудный моноимпульсный способ пеленгации, при прямом применении в станциях РТР заключается в том, что возникает серьезная проблема обнаружения и пеленгации сигналов МРЛС. Именно по этой причине созданные в конце прошлого столетия РЛС называют малозаметными (в зарубежной печати их называют LPI-radar).
Задачей изобретения является создание устройства для пеленгации сигналов с малой пиковой мощностью и сложным законом модуляции для использования в станциях радиотехнической разведки, т.е. в системах пассивной радиолокации.
Задача решается при использовании предложенного устройства, которое в отличие от известного, содержащего четыре антенны, содержит четыре дополнительные антенны, каждая из которых установлена в паре с основной антенной с условием попарного совмещения диаграмм направленности, четыре коррелятора, суммарно-разностное устройство, при этом выходы каждой пары антенн (основной и дополнительной) соединены с соответствующим коррелятором, а выходы каждого из четырех корреляторов соединены с суммарно-разностным устройством.
Техническим результатом использования предлагаемого устройства является то, что на суммарно-разностное устройство в отличие от известного поступают не сигналы с антенн, а корреляционные функции сигналов, что равносильно созданию оптимальной корреляционной обработки сигналов в соответствии с формулой (1) и возможности измерения угловых координат при малой пиковой мощности сигнала. При этом в формуле (1) под x(t) и у(t) следует понимать сигналы, принятые разными антеннами, один из которых можно считать опорным по отношению к другому.
Признаками, которые позволяют признать заявляемое техническое решение (устройство) соответствующим критериям «новизна» и «изобретательский уровень», являются следующие:
- наличие четырех дополнительных антенн, установленных с условием попарного совмещения диаграмм направленности с основными антеннами;
- выходы каждой пары антенн (основная и дополнительная) соединены с коррелятором;
- наличие четырех корреляторов, определяющих корреляционные функции сигналов, поступающих с соответствующей пары антенн;
- выход каждого коррелятора соединен с суммарно-разностным устройством, на которое поступают корреляционные функции сигналов, что позволяет реализовать пеленгацию источников радиоизлучения при малой пиковой мощности сигнала.
Предлагаемое изобретение характеризуется на следующих фигурах:
Фиг.1. Схема амплитудного моноимпульсного пеленгатора малозаметных радиолокационных станций.
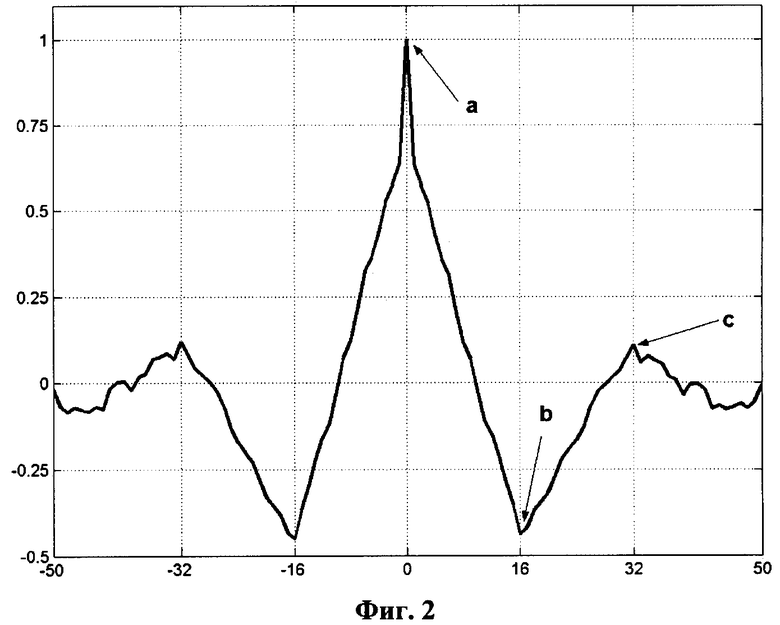
Фиг.2. Увеличенный фрагмент центральной части нормализованной корреляционной функции сложных дискретно-кодированных сигналов (СДКС).
Предлагаемое устройство содержит четыре антенны 1, 2, 3 и 4, суммарно-разностное устройство 5, дополнительные антенны 6, 7, 8 и 9, установленные попарно с основными с условием совмещения диаграмм направленности основных и дополнительных антенн: 1 и 6, 2 и 7, 3 и 8, 4 и 9. Выходы каждой пары антенн соединены с корреляторами 10, 11, 12 и 13 соответственно. Выходы каждого коррелятора 10-13 соединены с суммарно-разностным устройством 5.
Работа предлагаемого устройства осуществляется следующим образом.
Сигналы с каждой пары антенн 1 и 6, 2 и 7 (работающих для определения координат в азимутальной плоскости), а также с пар антенн 3 и 8, 4 и 9 (работающих для определения координат в угломестной плоскости) поступают соответственно на корреляторы 10, 11, 12 и 13,в которых осуществляют построение корреляционных функций сигналов. Затем корреляционные функции сигналов поступают на суммарно-разностное устройство 5, где по корреляционным функциям, поступившим с корреляторов 10 и 11, определяют азимут, а с корреляторов 12 и 13 - угол места.
Было проведено математическое моделирование корреляционной системы обнаружения и анализа сложных дискретно-кодированных сигналов (СДКС). Выбранная структурная схема модели предлагаемого устройства соответствует варианту определения наличия сигнала по корреляционным признакам в двухканальном пассивном локаторе.
Коррелятор, используемый при обработке шумоподобных сигналов для определения их наличия во входном сигнале, формирует корреляционную функцию, имеющую свойственный сложным дискретно-кодированным сигналам ярко выраженный главный лепесток (фиг.2). Это свойство используется для обнаружения входного сигнала по двум приемным каналам с последующим решением задачи пеленгования. Признак превышения пика корреляционной функции порогового уровня и первичные характеристики сигнала передаются в суммарно-разностное устройство, что служит признаком начала анализа входной последовательности с целью выделения параметров сложных дискретно-кодированных сигналов. Суммарно-разностное устройство выполняет непосредственно обработку сигнала с использованием алгоритмов вейвлет-преобразования.
Таким образом, для приема сигналов моноимпульсный пеленгатор, например, в азимутальной плоскости, имеющий не две, а четыре антенны, по сути дела позволяет формировать опорный сигнал, что эквивалентно созданию оптимального фильтра, в результате чего потенциальные точности измерения угловых координат, как и в активных РЛС, зависят не от пиковой мощности, а от энергии сигнала. В конечном итоге LPI-radar становятся заметными.
Литература
1. А.И.Леонов, К.И.Фомичев. «Моноимпульсная радиолокация», изд. «Советское радио», Москва - 1970 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2326397C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ АМПЛИТУДНОЙ ПСЕВДОМОНОИМПУЛЬСНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2157549C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ В МОНОИМПУЛЬСНЫХ ГОЛОВКАХ САМОНАВЕДЕНИЯ | 2006 |
|
RU2303806C1 |
Устройство пеленгации малозаметных радиолокационных станций (РЛС) относится к области измерительной техники и может быть использовано в пассивной радиолокации, в том числе в средствах радиотехнической разведки. Заявленное устройство содержит четыре основные антенны и четыре дополнительные антенны. Основные и дополнительные антенны установлены с условием попарного совмещения диаграмм направленности. Выходы каждой пары основной и дополнительной антенн первой и шестой, второй и седьмой, третьей и восьмой, четвертой и девятой соединены с соответствующим коррелятором. Выход каждого из четырех корреляторов соединен с суммарно-разностным устройством. Предложенный моноимпульсный пеленгатор позволяет формировать опорный сигнал, что эквивалентно созданию оптимального фильтра, в результате чего потенциальные точности измерения угловых координат, как и в активных РЛС, зависят не от пиковой мощности, а от энергии сигнала. В конечном итоге малозаметные РЛС становятся заметными, что и является достигаемым техническим результатом. 2 ил.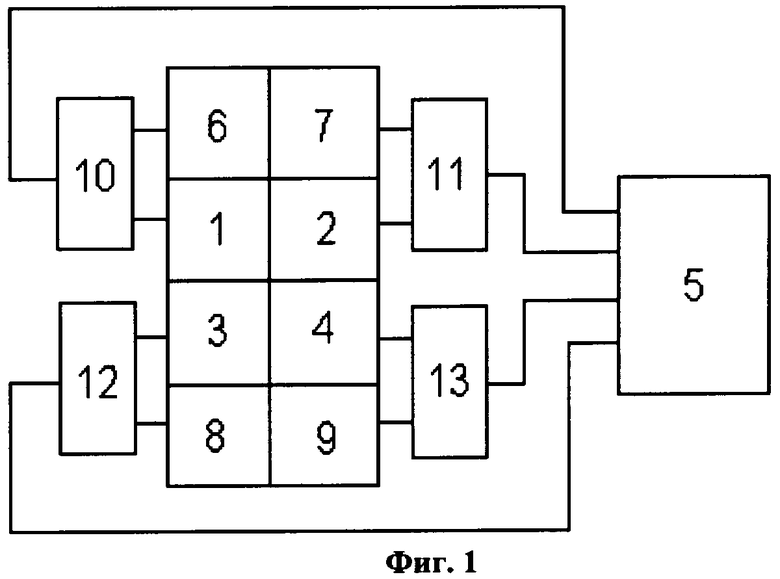
Устройство для амплитудной моноимпульсной пеленгации малозаметных радиолокационных станций, содержащее четыре антенны и суммарно-разностное устройство, отличающееся тем, что содержит четыре дополнительные антенны, установленные с условием попарного совмещения диаграмм направленности с основными антеннами, четыре коррелятора, причем выходы каждой пары основной и дополнительной антенн первой и шестой, второй и седьмой, третьей и восьмой, четвертой и девятой соединены с соответствующим коррелятором, а выход каждого коррелятора соединен с суммарно-разностным устройством.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация, Москва, Советское Радио, 1970, с.27 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И ДИПОЛЬНЫЙ РАДИООТРАЖАТЕЛЬ | 1993 |
|
RU2057350C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| US 6853330 В1, 08.02.2005 | |||
| ДВУХКОЛЕСНАЯ ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ В ТАРЕ | 1935 |
|
SU52491A1 |
| US 6087974 А, 11.07.2000 | |||
| US 2006262007 А1, 23.11.2006. | |||

