Изобретение относится к измерительной технике и может быть использовано для измерения и контроля угловых перемещений объекта.
Известно устройство для измерений и перемещений, содержащее вращающийся барабан с эластичными демпфирующими канавками в виде объемной винтовой спирали, в которые помещен звукопровод из магнитомягкого ферромагнитного материала. Свободный конец звукопровода проходит через неподвижные передающую и приемную катушки с постоянными магнитами смещения и соединен с перемещающимся объектом [1].
Известное устройство можно использовать для измерения углового положения вращающегося барабана как функцию линейного перемещения свободного конца звукопровода, но данное устройство имеет следующие недостатки:
- сложная конструкция преобразователя за счет наличия в его составе двух катушек с постоянными магнитами, узла натяжения звукопровода в виде пружины;
- низкая надежность и помехоустойчивость за счет наличия в его составе трущихся элементов конструкции (механические взаимодействия звукопровода с внутренней поверхностью каркасов передающей и приемной катушек), способные привести к формированию в акустическом тракте шумовых сигналов. Такие сигналы шумов механической природы из объекта перемещения через недемпфированный конец звукопровода свободно смогут перейти в приемный тракт преобразователя и исказить измерительную информацию;
- ограниченные скоростные режимы при выдвижении или складывании свободного конца звукопровода. В случае интенсивного перемещения конца звукопровода в сторону катушки считывания механическая спираль вращающегося барабана неспособна скомпенсировать постоянное натяжение звукопровода, в результате чего звукопровод может принять любую произвольную форму. А при интенсивном выдвижении в обратном направлении увеличивается механическое напряжение в звукопроводе, способное привести к уменьшению или полному исчезновению информационного сигнала.
Известно устройство для измерения угловых положений объекта [2], содержащее кольцевой звукопровод, акустический поглотитель (демпфер), установленный на звукопроводе, сосредоточенный элемент считывания (катушка считывания), поляризатор (магнитный элемент позиционирования).
У известного устройства ограниченный диапазон измерения угла наклона (менее 360 градусов) из-за продольных габаритных размеров демпфера, отражателя и катушки считывания. Для реальных измерительных систем длина демпфера составляет не менее 60 мм, длина катушки считывания - не менее 20 мм, длина конструкции отражателя - не менее 20 мм. Кроме того, в районе катушки считывания существует так называемая "мертвая зона" - это участок звукопровода, в пределах которого распознавание магнитоакустической волны невозможно приемным трактом. В реальных измерительных системах "мертвая зона" составляет не менее 70 мм [3]. Также недостатком является то, что контроль угловых отклонений объекта осуществляется строго от вертикального положения.
Известно устройство для измерения и контроля угловых положений объекта [4], содержащее четыре кольцевых звукопровода (волновода) из магнитострикционного материала с элементами крепления и фиксации, четыре электроакустических преобразователя (обмотки катушек) и элементы обработки результатов измерения вторичного преобразователя.
Недостатками данного устройства является сложная конструкция первичного преобразователя и технология его изготовления, а также сложная обработка результатов измерения. Устройство эффективно для измерения параметров только высокоскоростных вращающихся объектов. Это видно по формуле 
 Подставляя в приведенные формулы значения скорости продольной волны в звукопроводе из сплавов 44НХТЮ, 42НХТЮ и им подобные ν≈5000 м/c, скорость вращения контролируемого технического объекта νx<1 м/с, радиус кольцевых звукопроводов R=0,1 м, получим ΔT=Т1-T2≤5·10-9 с. Для измерения временного интервала ΔТ с требуемой точностью нужен эталонный генератор с частотой не менее 1 ГГц.
Подставляя в приведенные формулы значения скорости продольной волны в звукопроводе из сплавов 44НХТЮ, 42НХТЮ и им подобные ν≈5000 м/c, скорость вращения контролируемого технического объекта νx<1 м/с, радиус кольцевых звукопроводов R=0,1 м, получим ΔT=Т1-T2≤5·10-9 с. Для измерения временного интервала ΔТ с требуемой точностью нужен эталонный генератор с частотой не менее 1 ГГц.
Известно другое устройство для измерения перемещений объекта [5], выбранное в качестве прототипа, содержащее линейный магнитострикционный звукопровод (акустический волновод), концы которого помещены в токопроводящие демпферы, приемник перемещений (катушка считывания или акустоэлектрический преобразователь), задатчик линейного перемещения (постоянный магнит или магнитный элемент позиционирования).
Данное устройство предназначено для измерения линейных перемещений. Для измерения угловых перемещений следует придать волноводу кольцевую форму, но диапазон измерения будет также ограничен, как и у приведенного выше аналога [2], и составит менее 360 градусов.
Задачей изобретения является расширение диапазона угловых перемещений.
Решение поставленной задачи достигается тем, что магнитострикционный преобразователь перемещений содержит прямолинейный акустический волновод, концы которого демпфированы с помощью токопроводящего демпфера, акустоэлектрический преобразователь, установленный соосно на волноводе, задатчик перемещения, который выполнен в виде одного витка магнитной винтовой линии геликоидального вида, размещенного одноименным магнитным полюсом наружу на поверхности цилиндра. Цилиндр расположен параллельно волноводу и выполнен с возможностью вращения вокруг его оси, начало и конец магнитной винтовой линии соответствуют началу и концу рабочей зоны измерения на линейном участке звукопровода. Математически форма винтовой линии может быть представлена уравнением в параметрической форме:

здесь x, у, z - координаты декартовой системы координат, центром которой является точка пересечения оси цилиндра с перпендикуляром, восстановленным в точке начала рабочей зоны 8, причем ось OZ совпадает с осью цилиндра;
R - радиус цилиндра;
lрз - длина рабочей зоны измерения угловых перемещений цилиндра;
ϕ - угол поворота вращающего объекта (цилиндра).
На фигуре 1 изображен предлагаемый магнитострикционный датчик перемещений.
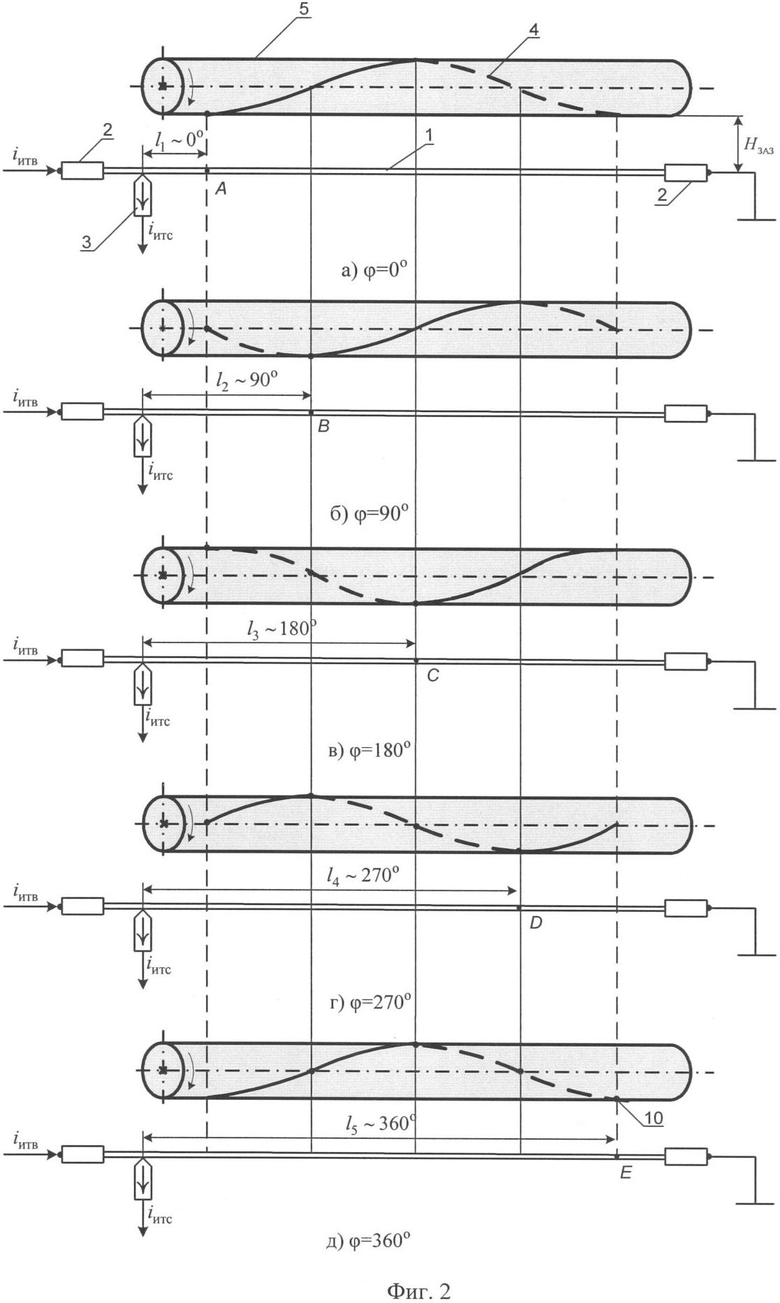
На фигуре 2 показаны перемещения, точки взаимодействия магнитной винтовой линии с акустическим волноводом в рабочем диапазоне.
На фигуре 3 показан вариант технической реализации магнитной винтовой линии геликоидального вида на поверхности цилиндра.
Магнитострикционный датчик перемещений (фигура 1) содержит линейный акустический волновод 1 из магнитострикционного материала, концы которого демпфированы с помощью токопроводящих демпферов 2, акустоэлектрический преобразователь 3, установленный соосно на звукопроводе 1, задатчик 4 перемещений в виде одного витка магнитной винтовой линии геликоидального вида, размещенного на поверхности цилиндра 5, а ось цилиндра 5 механически связана с объектом вращения. Начало 6 и конец 7 магнитной винтовой линии 4 соответствуют началу 8 и концу 9 рабочей зоны измерения на линейном участке волновода 1.
Магнитострикционный датчик перемещений работает следующим образом.
Первоначально датчик (фигура 1) находится в исходном состоянии.
Электрические импульсы тока возбуждения iитв (фигура 1) через токопроводящие демпферы 2 проходят в среду акустического волновода 1 и возбуждают в нем под ближайшей точкой 10 взаимодействия магнитной винтовой линии 4 с волноводом 1 (фигура 2) упругие крутильные волны (эффект Видемана). Эта волна в следующий момент времени распространяется в обе стороны волновода 1 со скоростью νакв. Достигнув демпферов 2, эта волна поглощается ими и затухает. При прохождении акустоэлектрического преобразователя упругая волна 3 наводит в нем ЭДС (эффект Виллари) через время  от момента подачи импульса тока возбуждения iитв в волноводе 1.
от момента подачи импульса тока возбуждения iитв в волноводе 1.
Интервал времени tx между импульсами тока возбуждения и считывания пропорционален определенному перемещению lx, определяемому ближайшей точкой 10 взаимодействия магнитной винтовой линии 4 с волноводом 1.
При вращении цилиндра 5 от 0° до 360° ближайшая точка 10 взаимодействия магнитной винтовой линии 4 с волноводом последовательно проходит начало 8 и конец 9 рабочей зоны измерения на линейном участке волновода 1.
На фигуре 2 в качестве примера показаны перемещения точки 10 магнитной винтовой линии 4 вдоль волновода 1 с интервалом ϕх=90° угла вращения цилиндра 5.
Техническая реализация заявленного устройства:
- акустический волновод 1 - проволока из ферромагнитного сплава, например 44НХТЮ сечением 1,0 мм;
- токопроводящие демпферы 2 - электропроводящий полимерный композит с высокими демпфирующими свойствами [6];
- акустический преобразователь 3 - обмотка катушки из провода ПЭВ - 0,063 мм;
- магнитная винтовая линия 4 может быть выполнена с использованием различных технологий, например путем нанесения магнитного (ферромагнитного) покрытия на внешнюю поверхность цилиндра 5 и намагничивания одноименным полюсом наружу, как принято при нанесении магнитной памяти в энергонезависимых внешних запоминающих устройствах на цилиндрических магнитных барабанах [7, 8] или при нанесении магнитной пленки 4 на немагнитную эластичную прямоугольную поверхность 11 (фигура 3а). Высота h прямоугольной поверхности 11 равна длине окружности у основания цилиндра 5, длина прямоугольной поверхности 11 равна длине рабочей зоны измерения. Затем прямоугольную поверхность 11 с линейной магнитной пленкой 4 приклеивают на цилиндр 5 (фигура 3б), в результате чего линейная магнитная пленка 4 преобразуется на цилиндре 5 в винтовую линию геликоидального вида.
На основании проведенных патентных исследований не обнаружено технических решений с совокупностью признаков и решаемых задач, схожих с заявляемым устройством, что позволяет сделать вывод о его соответствии критерию изобретения "неочевидность".
Предлагаемый магнитострикционный датчик перемещений позволяет расширить диапазон измерения угловых перемещений и область его применения. Это существенно отличает предложенное устройство от аналогов и прототипа.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. АС СССР №592022, кл. H04R 15/00, 1978. Бюл. 5. Артемьев Э.А.
2. АС РФ №1811265, кл. G01C 9/18, 1995. Бюл. 17. Демин С.Б.
3. Демин С.Б. Информационные измерительные системы с использованием магнитострикционных приборов. Диссертация доктора технических наук. - Пенза, 2003. - 443 с. Для служебного пользования.
4. Патент РФ №2032179, кл. G01P 3/481, 1995. Демин С.Б.
5. АС СССР №1630456, кл. G01B 17/00, 1983. Гуль В.Е. Шенфиль Л.З. Электропроводящие полимерные композиции. - М., Химия. 1984-240 с.
6. Майоров С.А. и др. Введение в микро ЭВМ;
7. Майоров С.А., Кириллов В.В. Приблуда А.А. - Л.: Машиностроение, Ленинградское отделение, 1988. - с.154-162.
8. Сергеев Н.П., Вашкевич Н.П. Основы вычислительной техники. - М.: Высшая школа, 1988. - с.184-193.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2452918C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1384947A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА НАКЛОНА | 1991 |
|
RU2075728C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Магнитострикционный дифференциальный преобразователь линейных перемещений | 1989 |
|
SU1716322A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347187C1 |
| Устройство для измерения уровня и плотности жидкости | 2020 |
|
RU2730404C1 |

Изобретение относится к измерению и контролю угловых перемещений объекта в системах контроля и управления. Магнитострикционный датчик перемещений состоит из прямолинейного акустического волновода, концы которого демпфированы с помощью токопроводящих демпферов, акустоэлектрического преобразователя, установленного соосно на волноводе, задатчика перемещений, выполненного в виде одного витка магнитной винтовой линии геликоидального вида, размещенного на поверхности цилиндра, расположенного параллельно волноводу и выполненного с возможностью вращения вокруг своей оси. Технический результат: расширение диапазона измерения угловых перемещений вращающегося объекта. 3 ил.
Магнитострикционный датчик перемещений, содержащий прямолинейный акустический волновод, концы которого демпфированы с помощью токопроводящих демпферов, акустоэлектрический преобразователь, установленный соосно на волноводе, задатчик перемещений, отличающийся тем, что задатчик перемещений выполнен в виде одного витка магнитной винтовой линии геликоидального вида, размещенного одноименным магнитным полюсом наружу на поверхности цилиндра, причем цилиндр расположен параллельно волноводу и выполнен с возможностью вращения вокруг его оси.
| Магнитострикционный преобразователь линейных перемещений | 1976 |
|
SU592022A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1552002A1 |
| US 5473245 А, 05.12.1995 | |||
| US 5367255 A, 22.11.1994. | |||

