Изобретение относится к измерительной технике и может быть использовано для измерения и контроля угловых многооборотных не реверсивных перемещений объекта.
Известно устройство для измерений перемещений, содержащее вращающийся барабан с эластичными демпфирующими канавками в виде объемной винтовой спирали, в которые помещен звукопровод из ферромагнитного материала. Свободный конец звукопровода проходит через неподвижные передающую и приемную катушки с постоянными магнитами смещения и соединен с перемещающимся объектом [1].
Известное устройство можно использовать для измерения углового положения вращающегося барабана как функцию линейного перемещения свободного конца звукопровода, но данное устройство имеет следующие недостатки:
- сложная конструкция преобразователя за счет наличия в его составе двух катушек с постоянными магнитами, узла натяжения звукопровода в виде пружины;
- низкая надежность и помехоустойчивость за счет наличия в его составе трущихся элементов конструкции (механические взаимодействия звукопровода с внутренней поверхностью каркасов передающей и приемной катушек), способные привести к формированию в акустическом тракте шумовых сигналов. Такие сигналы шумов механической природы из объекта перемещения через недемпфированный конец звукопровода свободно смогут перейти в приемный тракт преобразователя и исказить измерительную информацию;
- ограниченные скоростные режимы при выдвижении или складывании свободного конца звукопровода. В случае интенсивного перемещения конца звукопровода в сторону катушки считывания механическая спираль вращающегося барабана неспособна скомпенсировать постоянное натяжение звукопровода, в результате чего звукопровод может принять любую произвольную форму. А при интенсивном выдвижении в обратном направлении увеличивается механическое напряжение в звукопроводе, способное привести к уменьшению или полному исчезновению информационного сигнала.
Известно устройство для измерения угловых положений объекта [2], содержащее кольцевой звукопровод, акустический поглотитель (демпфер), установленный на звукопроводе, сосредоточенный элемент считывания (катушка считывания), поляризатор (магнитный элемент позиционирования).
У известного устройства ограниченный диапазон измерения угла наклона (менее 360 градусов) из-за продольных габаритных размеров демпфера, отражателя и катушки считывания. Для реальных измерительных систем длина демпфера составляет не менее 60 мм, длина катушки считывания - не менее 20 мм, длина конструкции отражателя - не менее 20 мм. Кроме того, в районе катушки считывания существует так называемая «мертвая зона» - это участок звукопровода, в пределах которого распознавание магнитоакустической волны невозможно приемным трактом. В реальных измерительных системах «мертвая зона» составляет не менее 70 мм [3]. Также недостатком является то, что контроль угловых отклонений объекта осуществляется строго от вертикального положения.
Известно устройство для измерения и контроля угловых положений объекта [4], содержащее четыре кольцевых звукопровода (акустических волноводов) из магнитострикционного материала с элементами крепления и фиксации, четыре электроакустических преобразователя (обмотки катушек) и элементы обработки результатов измерения вторичного преобразователя.
Недостатками данного устройства является сложная конструкция первичного преобразователя и технология его изготовления, а также сложная обработка результатов измерения. Устройство эффективно для измерения параметров только высокоскоростных вращающихся объектов. Это видно по формуле  ,
,  Подставляя в приведенные формулы значения скорости продольной волны в звукопроводе из сплавов 44НХТЮ, 42НХТЮ и им подобные νпр ≈ 5000 м/с, скорость вращения контролируемого технического объекта νх<1.0 м/с, радиус кольцевых звукопроводов R=0.1 м, получим ΔT=T1-Т2≤5·10-9 с. Для измерения временного интервала ΔT с требуемой точностью нужен эталонный генератор с частотой не менее 1.0 ГГц.
Подставляя в приведенные формулы значения скорости продольной волны в звукопроводе из сплавов 44НХТЮ, 42НХТЮ и им подобные νпр ≈ 5000 м/с, скорость вращения контролируемого технического объекта νх<1.0 м/с, радиус кольцевых звукопроводов R=0.1 м, получим ΔT=T1-Т2≤5·10-9 с. Для измерения временного интервала ΔT с требуемой точностью нужен эталонный генератор с частотой не менее 1.0 ГГц.
Известен магнитострикционный датчик перемещений [5], выбранный в качестве прототипа, содержащий прямолинейный акустический волновод, концы которого демпфированы с помощью токопроводящих демпферов, акустоэлектрический преобразователь, установленный соосно на волноводе, задатчик перемещений, выполненный в виде одного витка магнитной винтовой линии геликоидального вида, размещенного одноименным магнитным полюсом наружу на поверхности цилиндра, причем цилиндр расположен параллельно волноводу и выполнен с возможностью вращения вокруг его оси.
Известный датчик позволяет с высокой надежностью и точностью измерять угловые перемещения объекта только в диапазоне 0…<360 градусов. Это связано с проблемной зоной измерения угловых перемещений объекта, в районе начальной 6 и конечной 7 точек магнитной винтовой линии 4, которые соответствуют началу 8 и концу 9 рабочей зоны измерения на линейном участке волновода 1 (см. описание прототипа). Даже если на этапе изготовления преобразователя эту зону можно максимально совместить, то в процессе эксплуатации из-за различных факторов (температурные, вибрационные и т.д.) эти точки могут не совпадать. И при переходе от 360 до 0 градусов или наоборот может наблюдаться пропадание измерительных сигналов.
Задачей изобретения является повышение надежности, точности и расширение диапазона угловых перемещений.
Решение поставленной задачи достигается тем, что магнитострикционный датчик перемещений содержит прямолинейный акустический волновод, концы которого демпфированы с помощью токопроводящих демпферов, акустоэлектрический преобразователь, установленный соосно на волноводе, магнитный задатчик перемещений, размещенный на поверхности цилиндра одноименными полюсами наружу, цилиндр расположен параллельно волноводу и выполнен с возможностью вращения вокруг своей оси, причем задатчик перемещений выполнен с равным шагом из правого и левого полувитков магнитных винтовых линий, начало правого и левого полувитков объединены в одной точке цилиндрической поверхности, а концы правого и левого полувитков объединены в другой точке цилиндрической поверхности.
Математические формы полувитков винтовых линий могут быть представлены уравнениями в параметрической форме:
здесь х, y, z - координаты декартовой системы координат, центром которой является точка пересечения оси цилиндра с перпендикуляром, восстановленным в точке начала рабочей зоны 8, причем ось OZ совпадает с осью цилиндра;
R - радиус цилиндра;
lрз - длина рабочей зоны измерения угловых перемещений цилиндра;
φ - угол поворота вращающего объекта (цилиндра).
На фигуре 1 изображен предлагаемый магнитострикционный датчик перемещений.
На фигуре 2 показаны перемещения, точки взаимодействия магнитной винтовой линии с акустическим волноводом в рабочем диапазоне.
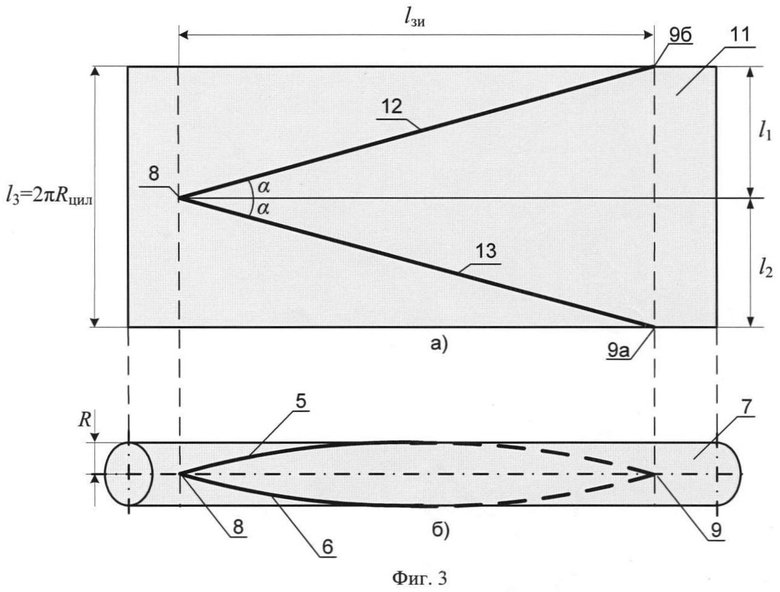
На фигуре 3 показан вариант технической реализации полувитков магнитных винтовых линий на поверхности цилиндра.
Магнитострикционный датчик перемещений (фигура 1) содержит линейный акустический волновод 1 из магнитострикционного материала, концы которого демпфированы с помощью токопроводящих демпферов 2 и 3, акустоэлектрический преобразователь 4, установленный соосно на звукопроводе 1, задатчик перемещений выполнен с равным шагом из правого 5 и левого 6 полувитков магнитных винтовых линий, размещенных одноименными магнитными полюсами наружу на поверхности цилиндра 7, цилиндр 7 расположен параллельно волноводу 1 и выполнен с возможностью вращения вокруг своей оси, причем начало правого и левого полувитков 5 и 6 объединены в одной точке 8, а концы правого и левого полувитков 5 и 6 объединены в другой точке 9.
Магнитострикционный датчик перемещений работает следующим образом.
Электрические импульсы тока возбуждения iитв (фигура 1) через токопроводящие демпферы 2 и 3 проходят в среду акустического волновода 1 и возбуждают в нем под ближайшей точкой 10 взаимодействия одной из полувитков 5 или 6 магнитных винтовых линий с волноводом 1 (фигура 2) упругие крутильные волны (эффект Видемана). Эта волна в следующий момент времени распространяется в обе стороны волновода 1 со скоростью νв. Достигнув демпферов 2 и 3, эта волна поглощается ими и затухает. При прохождении акустоэлектрического преобразователя 4 упругая волна наводит в нем импульсы тока считывания iитс (эффект Виллари) через время tx=lx/νв от момента подачи импульса тока возбуждения iитв в волноводе 1.
Интервал времени tx между импульсами тока возбуждения и считывания пропорционален определенному перемещению lx, определяемому ближайшей точкой 10 взаимодействия одной из полувитков 5 или 6 магнитных винтовых линий с волноводом 1.
Точка 8, объединяющая начала полувитков 5 и 6 магнитных винтовых линий, соответствует 0° и 360°, а точка 9, объединяющая концы полувитков 5 и 6, соответствует 180°.
При вращении цилиндра 7 от 0° до 360° ближайшая точка 10 взаимодействия задатчика перемещения с волноводом 1 последовательно проходит из точки 8 полувитка 5 до точки 9, затем движение точки 10 проходит по полувитку 6 до точки 8 и далее процесс повторяется.
На фигуре 2 в качестве примера показаны перемещения точки 10 задатчика перемещения вдоль волновода 1 с интервалом φx=45° угла вращения цилиндра 7.
Техническая реализация заявленного устройства:
- акустический волновод 1 - проволока из ферромагнитного сплава, например 44НХТЮ сечением 1,0 мм [6];
токопроводящие демпферы 2 и 3 - полимерные композиты с высокими демпфирующими свойствами [7];
- акустический преобразователь 4 - обмотка катушки из провода ПЭВ - 0,063 мм;
- задатчик перемещений представляет пространственную кривую, состоящую из правого и левого полувитков 5 и 6, объединенных общими точками 8 и 9, может быть выполнен с использованием различных технологий, например, путем нанесения магнитного (ферромагнитного) покрытия на внешнюю поверхность цилиндра 7 и намагничивания одноименным полюсом наружу, как принято при нанесении магнитной памяти в энергонезависимых внешних запоминающих устройствах на цилиндрических магнитных барабанах [8, 9]. На фигуре 3а показан другой вариант изготовления задатчика перемещений. На эластичную немагнитную поверхность 11 наносится магнитный материал, например магнитопласт, в виде прямых линий равных по длине отрезков 12 и 13, соединенных в общей точке 8. Длина отрезка 12 равна длине правого полувитка 5 магнитной винтовой линии, а длина отрезка 13 левого полувитка 6 магнитной винтовой линии. Проекции отрезков 12 и 13 равны между собой (l1=l2) и соответствуют шагу полувитков 5 и 6. Соблюдение равенства отрезков 12 и 13, проекций l1 и l2, в том числе и равенство шага полувитков 5 и 6, необходимо для обеспечения высокой линейности выходной характеристики датчика. Расстояние между точками 9a и 9б равно длине окружности цилиндра 7 2πRцил. Зона измерения угловых перемещений соответствует lзи. Прямоугольную поверхность 11 с магнитным материалом приклеивают на цилиндр 7 (фигура 36) с обязательным совмещением точек 9а и 9б, в результате чего получим задатчик перемещений, состоящий из правого и левого полувитков 5 и 6, объединенных общими точками 8 и 9.
Понятие шаг винта взято из источника информации [10].
На основании проведенных патентных исследований не обнаружено технических решений с совокупностью признаков и решаемых задач, схожих с заявляемым устройством, что позволяет сделать вывод о его соответствии критерию изобретения «неочевидность».
Предлагаемый магнитострикционный датчик перемещений позволяет повысить надежность, точность и расширить диапазон измерения угловых перемещений в диапазоне от 0° до 360° и более градусов. Это существенно отличает предложенное устройство от аналогов и прототипа.
Источники информации
1. А.с. 592022 СССР. МКИ: H04R 15/00. Магнитострикционный преобразователь линейных перемещений / Э.А.Артемьев и др. // Опубл. 05.02.78. - Бюл. №5.
2. Патент 1811265 РФ. МПК: G01C 9/18. Ультразвуковой наклономер / С.Б.Демин // Опубл. 19.06.95. Бюл. №17.
3. Демин С.Б. Информационные измерительные системы с использованием магнитострикционных приборов: Дис…док. техн. наук. - Пенза, 2003. - 443 с. Для служебного пользования.
4. Патент 2032179 РФ. МПК: G01P 3/481. Ультразвуковой преобразователь скорости угловых перемещений / С.Б.Демин // Опубл. 27.03.95.
5. Патент 2343645 РФ. МПК: H04R 15/00, G01B 17/00. Магнитострикционный датчик перемещений / В.Н.Прошкин, А.Н.Дигузов, А.Н.Шеркутов // Опубл. 10.01.2009. - Бюл. №1.
6. Артемьев Э.А. Материалы для звукопроводов волноводных трактов магнитострикционных преобразователей перемещений. // Учебное пособие. - Астрахань: АГТУ, 1997. - 93 с.
7. Гуль В.Е., Шенфиль В.Е. Электропроводящие полимерные композиции. - М.: Химия. 1984 - 240 с.
8. Майоров С.А., Кириллов В.В. Приблуда А.А., - Л.: Машиностроение, Ленинградское отделение, 1988. - С.154-162.
9. Сергеев Н.П., Вашкевич Н.П. Основы вычислительной техники. - М.: Высшая школа, 1988. - С.184-193.
10. И.И.Артоболевский. Теория механизмов. - М.: «Наука», 1965. - 776 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2343645C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
| Устройство для измерения уровня и плотности жидкости | 2020 |
|
RU2730404C1 |
| ДЕМПФЕР ДЛЯ МАГНИТОСТРИКЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ | 2014 |
|
RU2566653C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА НАКЛОНА | 1991 |
|
RU2075728C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ ЖИДКОСТИ (ВАРИАНТЫ) | 2005 |
|
RU2285908C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Устройство для измерения уровня и плотности жидкости | 2019 |
|
RU2710008C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |

Изобретение может быть использовано для измерения и контроля угловых перемещений объекта в системах контроля и управления. Техническим результатом изобретения является расширение диапазона измерения угловых перемещений вращающегося объекта, повышение надежности и точности. Магнитострикционный датчик перемещений состоит из прямолинейного акустического волновода 1, концы которого демпфированы с помощью токопроводящих демпферов 2, 3 акустоэлектрического преобразователя 4, установленного соосно на волноводе 1, задатчика перемещений, выполненного из правого 5 и левого 6 полувитков магнитных винтовых линий, размещенных на поверхности цилиндра 7 одноименными полюсами наружу. Цилиндр 7 расположен параллельно волноводу 1 и выполнен с возможностью вращения вокруг своей оси. 3 ил.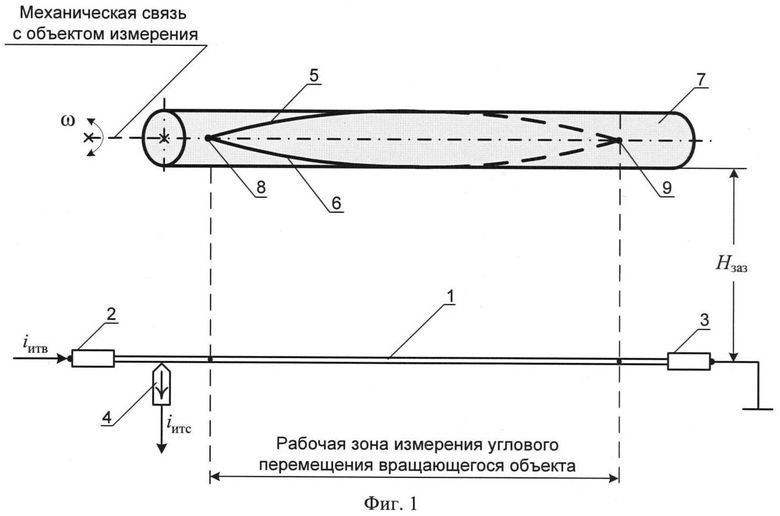
Магнитострикционный датчик перемещений, содержащий прямолинейный акустический волновод, концы которого демпфированы с помощью токопроводящих демпферов, акустоэлектрический преобразователь, установленный соосно на волноводе, магнитный задатчик перемещений, размещенный на поверхности цилиндра одноименными полюсами наружу, цилиндр расположен параллельно волноводу и выполнен с возможностью вращения вокруг своей оси, отличающийся тем, что задатчик перемещений выполнен с равным шагом из правого и левого полувитков магнитных винтовых линий, причем начало правого и левого полувитков объединены в одной точке цилиндрической поверхности, а концы правого и левого полувитков объединены в другой точке цилиндрической поверхности.
| МАГНИТОСТРИКЦИОННЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2343645C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| Магнитострикционный преобразователь перемещений | 1989 |
|
SU1619400A1 |
| US 6501263 B1, 31.12.2002 | |||
| US 5313160 A, 13.11.1990. | |||

