1
(21)4443196/25-28
(22)17.06.88
(46) 23.03.90. Бюл. № 11
(71)Пензенский политехнический институт
(72)С.Б.Демин
(53)531.14 (088.8)
(56)Авторское свидетельство СССР № 747812, кл. G 01 В 7/00, 1978
Авторское свидетельство СССР. № 1394033, кл. G 01 В 17/00, 1988.
(54)ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
(57)Изобретение относится к измерительной технике, а именно к магнито- акустическим преобразователям линейных перемещений, и может быть использовано в робототехнических системах
и комплексах. Цель изобретения - повышение точности и помехоустойчивости. Полученный временной интервал, пропорциональный величине контролируемого перемещения, поступает на счетчики грубого и точного отсчета, в которых осуществляется заполнение этого временного интервала импульсами частот, отличающихся в несколько раз, и одновременный подсчет количества этих импульсов. Для повышения помехоустойчивости осуществляется подсчет количества импульсов на электрическом выходе генератора, возбуждающего ультразвуковую волну, и количества импульсов, прошедших через звукопровод и принятых элементом считывания. Если полученные количества не совпадают, то делается вывод о наличии ошибки, 1 Зап. ф-лы, 2 ил.t
1Л
С.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| Ультразвуковой преобразователь перемещений | 1989 |
|
SU1765690A1 |
Изобретение относится к измерительной технике, а именно к магнитоакустическим преобразователям линейных перемещений, и может быть использовано в робототехнических системах и комплексах. Цель изобретения - повышение точности и помехоустойчивости. Полученный временной интервал, пропорциональный величине контролируемого перемещения, поступает на счетчики грубого и точного отсчета, в которых осуществляется заполнение этого временного интервала импульсами частот, отличающихся в несколько раз, и одновременный подсчет количества этих импульсов. Для повышения помехоустойчивости осуществляется подсчет количества импульсов на электрическом выходе генератора, возбуждающего ультразвуковую волну, и количества импульсов, прошедших через звукопровод и принятых элементом считывания. Если полученные количества не совпадают, то делается вывод о наличии ошибки. 1 з.п. ф-лы, 2 ил.
Изобретение относится к измерительной технике, а именно к магнито- акустическим преобразователям линейных перемещений, и может быть использовано в робототехнических системах и комплексах
Целью изобретения является повышение точности и помехоустойчивости.
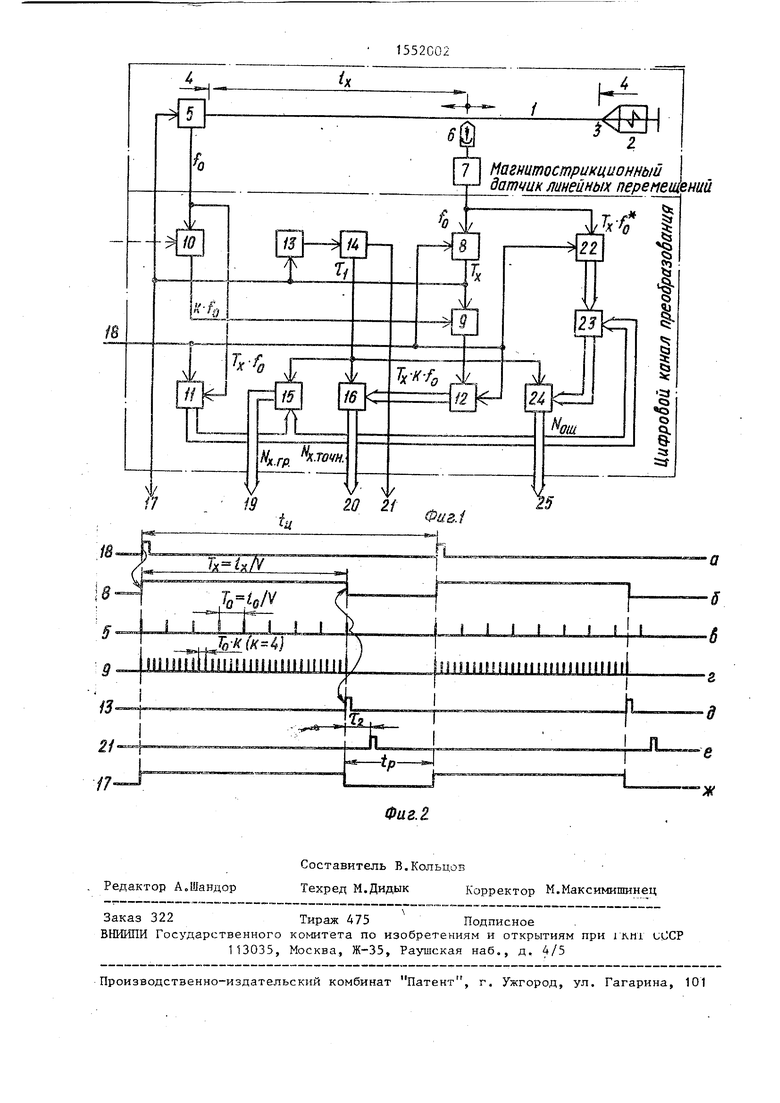
На фиг.1 приведена функциональная схема измерительного преобразователяj на фиг.2 - основные временные диаграммы, поясняющие работу преобразователя.
Измерительный преобразователь линейных перемещений содержит магнито- стрикционный датчик линейных перемещений, состоящий из звукопровода 1
из магнитострикционного материала, стабилизатора 2 растягивающих усилий, акустического демпфера 3, ограничителей 4 перемещений, генератора 5, подвижного элемента 6 считывания и предусилителя-формирователя 7, цифровой канал преобразования, состоящий из триггера 8 управления, элемента И 9, умножителя 10 частоты, счетчиков 11 и 12 грубого и точного отсчета, формирователя 13 импульсов, , элемента 14 задержки, первого 15 и второго 16 регистров, шину 17 запроса, шину 18 запуска, первую 19 и вторую 20 шины результата и шину 21 синхрониз ации.
СП СД
to
ГО
г1
Один конец звукопровода 1 магнито- Стрикционного датчика линейных перемещений подключен к механическому выходу генератора 5, а другой его ко- Нец - к стабилизатору 2 растягивающих Усилий через акустический демпфер 3. Соосно со звукопроводом 1 установлен сосредоточенный элемент 6 считывания, Выполненный с возможностью перемещения вдоль звукопроводов между его ограничителями 4 перемещений и кине- :атически подсоединяемый к объекту онтролируемого перемещения. Вывод лемента 6 считывания подключен к вхо ду триггера 8 управления цифрового канала преобразования через предуси- литель-формирователь 7, его выход соединен с входами элемента И 9, формирователя 13 импульсов, генератора 5 и подключен к шине 17 запроса. Электрический выход генератора 5 подсоединен к входу умножителя 10 частоты и счетному входу счетчика 11 грубого отсчета, его выходы подключены к первой шине 19 результата через первый регистр 15. Выход умножителя 10 частоты подсоединен к счетному входу счетчика 12 точного отсчета через элементы И 9, его выходы подключены к второй шине 20 результата через второй регистр 16. Выход формирователя 13 импульсов соединен с входом элемента 14 задержки, его первый выход соединен с синхровходами первого 15 и второго 16 регистров, а второй выход подключен к шине 21 синхронизации. Синхровход триггера 8 управления и нулевые входы счетчиков 11 и 12 грубого и точного отсчета объединены и подключены к шине . 18 запуска.
Кроме того, для повышения помехе- устойчивости работы измерительного преобразователя линейных перемещений за счет устранения влияния акустических помех на его магнитострикционный тракт передачи, в его цифровой канал преобразования дополнительно введены последовательно соединенные счетчик 22 контроля грубого отсчета, цифровой компаратор 23 и регистр 24 ошибки, первый вход счетчика 22 контроля грубого отсчета соединен с выходом предусилителя-формирователя 7, его второй вход с вторым входом триггера 8 управления, второй вход цифрового компаратора 23 с выходом счетчика 11 грубого отсчета, а второй вход регис
0
5
0
5
30
35
40
ра 24 ошибки - с выходом элемента 14 задержки. Выход регистра 24 ошибки является шиной 25 контроля ошибки.
Устройство работает следующим образом.
Первоначально устройство устанавливается в исходное состояние. По шине 17 запроса выставляется цифровой сигнал Запрос (фиг.2ж). В следующий момент по шине 18 запуска выставляется цифровой импульсный сигнал Запуск (фиг„2а), по которому производится обнуление счетчиков 11 и 12 грубого и точного отсчета, включение (установка в 1) триггера 8 управления (фиг,26). По сигналу триггера 8 управления производится запуск генератора 5 (фиг.2в), открывается логический ключ на элементе И 9 и снимается сигнал Запрос по шине 17 запроса.
Генератор 5 вырабатывает модулированные магнитоупругие сигналы по механическому выходу и электрические сигналы по цифровому выходу опорной магнитострикционной частоты f 0, которые соответственно проходят в звуко- провод 1 магнитострикционного датчика линейных перемещений, где распространяются с конечной продольной фазовой скоростью V магнитострикционной среды, и проходят в цифровой канал преобразования на счетный вход счетчика 11 грубого отсчета и сигнальный вход умножителя 10 частоты.
Умножитель 10 частоты выполняет преобразование опорной магнитострикционной частоты f j следования цифровых сигналов генератора 5 согласно выражению.
.гр
К f
о
где К - коэффициент преобразования частоты, которые с его выхода проходят через открытый логический элемент И 9 на счетный вход счетчика 12 точного отсчета (фиг.2г)0
Счетчики 11 и 12 грубого и точного отсчета производят подсчет числа импульсов, поступающих на их счетный вход за искомый временной интервал перемещения
т - Ь тх - v
}
где 1Х - искомое линейное перемещение.
Когда первый магнитоупругий зондирующий импульс пройдет с механического выхода генератора 5 через звукопровод 1 до подвижного элемента 6 считывания, который предусилителем формирователем 7 магнитострикционног датчика линейных перемещений преобразуется далее в видеоимпульс и поступает в цифровой канал преобразования на нулевой вход триггера 8 управления. По этому сигналу производится переключение в исходное состояние триггера 8 управления (фиг.26).
Выключение триггера 8 управления приводит к блокированию входа логического элемента И 9, через который с этого момента не проходят счетные импульсы частоты f 0 на счетный вход счетчика 12 точного отсчета (фиг.2г), останов генератора. 5 (фиг.2в) и формирование по шине 17 запроса сигнала Запрос. В результате на выходах счетчиков 11 и 12 грубого и точного отсчета формируются результирующие: n-разрядный код грубого счета
«.Т.
Lo.
и m-разрядный код точного счета
Nx точи тх f о,тр (2)
которые поступают далее на информационные входы соответственно первого 15 и второго 16 регистров.
Одновременно по срезу цифрового сигнала триггера 8 управления (фиг.26) производится запуск формирователя 13 импульсов, который вырабатывает короткий цифровой импульс (фиг.2д), поступающий на вход элемента 14 задержки, и задерживается по его первому выходу на время Ј, «Ј«,(Ј установления информационных сигналов на выходах счетчиков 11 и 12. После чего в первый 15 и второй 16 регистры производится запись соответствующих кодов (1) и (2), По другому выходу элемента 14 задержки цифровой импульс выдержи- вается на время с t Ј, + «6 , через которое результирующие сигналы в виде кодов (2) с выходов регистров 15 и 16 проходят на соответствующие шины 19 и 20 результата, формируя сигналы Код перемещения грубо и Код перемещения точно,;и подается на шину 21 синхронизации, формируя
- о 1552002
сигнал Синхронизация (фиг.2е). На
этом полный цикл преобразования заканчивается и устройство подготовлено к очередному циклу преобразования. Следующий цикл преобразования
- о
10
15
20
25
30
35
40
45
50
55
начинается через время tp реакции пользователя после принятия им сигнала Запрос, выставленного по шине 17 запроса, и выполняется без изменения согласно выше рассмотренного.
Для предотвращения переотражений продольных зондирующих магнитоупругих волн в магнитострикционном звукопро- воде 1 его противоположный от генератора 5 конец заключен в акустический демпфер 3. Стабилизатор 2 растягивающих усилий задает постоянное растягивающее механическое усилие магнитострикционного звукопровода 1, обеспечивая тем самым постоянство магнито- акустического сопротивления тракта передачи в процессе работы устройства.
Применение ограничителей 4 перемещений позволяет устанавливать требуемый диапазон линейного перемещения подвижного элемента 6 подмагничива- ния вдоль звукопровода преобразователя и предохранять его от механического разрушения в процессе работы.
Поскольку магнитострикционный тракт преобразователя достаточно чувствителен к акустическим помехам, может оказаться, что первым пришедшим магнитоупругим сигналом в зону считывания (магнитоупругого преобразования) будет акустический сигнал помехи, наведенный внешней средой. Следовательно, результат измерения будет искажен. Чтобы этого не произошло в устройстве осуществляется подсчет числа импульсов по электронному выходу генератора 5 и подсчет числа импульсов, прошедших через звукопровод 1 преобразователя. Количество импульсов в обоих случаях должно быть одинаковое в случае отсутствия помехи, поскольку они вырабатываются одним источником колебаний.
В блоке цифрового контроля производится подсчет числа импульсов, сформированных генератором 5 за искомый интервал перемещения Тх и прошедших через магнитострикционный эвуко- провод 1 преобразователя. Так, в счетчике 22 контроля грубого отсчета в конце цикла преобразования будет
хранится n-разрядный код грубого отсчета
гр
(3)
де f - канальная магнитострик- ционная частота, которая может отличаться от опорной
МаГНИТОСТрИКЦИОННОЙ ЧаСТОТЫ JQ
fs генератора 5 вследствие влияния факторов внешней среды.
На выходах счетчика 11 грубого отсчета будет храниться код (1). 15
Производя сравнение сформированных кодов (1) и (3) на цифровом ком араторе 23, получают т--разрядный од ошибки, который по сигналу элемента 14 задержки заносится в регистр 20 24 ошибки, и далее выставляется на шине 25 ошибки. Цифровой сигнал Ошибка формируется при невыполнении условия:
к.гр Nx.rp контр 0
по которому производят оценку достоверности полученного результата. Обнуление счетчика 22 контроля грубого 30 отсчета производится в начале каждого цикла преобразования по сигналу За- пуск, выставляемому по шине 18 запуска.
Использование в преобразователе $ двух цифровых шкал - грубой и точной, последнюю из которых можно программировать, позволяет повысить точность измерения и расширить область технического использования.40
Формула изобретения
0
0
$ 0
5
последовательно соединенные триггер управления и генератор, звукопровод из магнитострикционного материала с акустическим демпфером и стабилизатором растягивающих усилий на конце, элемент считывания, соединенный с ним пpeдycилитJeль-фopмиpoвaтeль, выход которого соединен с первым входом триггера управления, элемент задержки и соединенные с ним первый и второй регистры, отличающийся тем, что, с целью повышения точности измерения, он снабжен последовательно соединенными умножителем частоты, элементом И и счетчиком точного отсчета выход которого подключен к второму входу второго регистра, формирователем импульсов, вход которого соединен с выходом триггера управления, а выход - с входом элемента задержки, и счетчиком грубого отсчета, первый вход которого соединен с вторыми входами триггера управления и счетчика точного отсчета, второй вход - с выходом генератора и входом умножителя частоты, а выход - с вторым входом первого регистра, второй вход элемента И соединен с выходом триггера управления
