ПЕРЕКРЕСНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется согласно §119 раздела 35 Кодекса законов США по заявке на патент Кореи №2005-83561, поданной 8 сентября 2005 года в Управление Интеллектуальной Собственности Кореи, полное содержание которой включено в настоящую заявку посредством ссылки. Эта заявка может быть также отнесена к заявке на патент США №10/682484, находящейся в совместной собственности и поданной 10 октября 2003, полное содержание которой также включено в настоящую заявку посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
Настоящее изобретение относится к мобильному роботу. В особенности, настоящее изобретение относится к системе мобильного робота с заправочной станцией для заправки жидкостью мобильного робота, а также к способу заправки жидкостью системы мобильного робота.
Описание уровня техники
Следует пояснить, что мобильный робот - это робот, который перемещается сам и выполняет поставленную задачу. Далее под термином «робот» имеется в виду «мобильный робот».
Как правило, робот содержит источник питания, который снабжает его энергией (например, электрической), позволяющей роботу передвигаться и выполнять поставленную задачу. В качестве источника питания могут быть использованы аккумулятор или топливный элемент, представленные здесь как неограничивающие примеры. Неограничивающий пример топливного элемента включает метаноловый топливный элемент. Робот, использующий такой метаноловый топливный элемент, может содержать резервуар для хранения метанола, используемого для метанолового топливного элемента. Когда робот, использующий метаноловый топливный элемент, перемещается или выполняет заданную работу, он потребляет метанол. В результате запас метанола в резервуаре истощается. Таким образом, для того, чтобы робот мог продолжать передвигаться, резервуар должен быть пополнен метанолом до того, как он станет пустым.
Другие роботы могут использовать воду для выполнения своих задач. Например, такие роботы, как роботы, совершающие паровую чистку, влажную протирку, очищающие роботы и роботы-увлажнители, могут использовать воду для выполнения своих задач. Когда робот выполняет свою задачу, используя воду, то вода из резервуара потребляется. Таким образом, для того, чтобы роботы могли продолжить выполнение своих задач, резервуар должен быть пополнен водой до того, как он станет пустым.
Когда запасы метанола или воды в резервуаре иссякают, робот не в состоянии продолжать работу. Таким образом, время использования робота ограничено.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, данное изобретение создано для решения указанных выше проблем и других проблем, свойственных традиционному устройству. Цель данного изобретения заключается в создании мобильной робототехнической системы с заправочной станцией для заправки жидкостью, которая автоматически снабжает мобильный робот жидкостью, такой как вода или метанол, используемые в роботе, так что использование робота становится более удобным, а время работы робота увеличивается.
Таким образом, в качестве первого неограничивающего аспекта настоящего изобретения предлагается система с заправочной станцией, содержащая робот, резервуар робота, предназначенный для хранения жидкости и расположенный в роботе, и заправочную станцию, выполненную с возможностью подачи дополнительной жидкости в указанный резервуар.
В качестве другого неограничивающего аспекта настоящего изобретения предлагается робототехническая система с заправочной станцией, содержащая робот с топливным элементом, резервуар робота, расположенный в роботе и предназначенный для хранения топлива для топливного элемента, и заправочную станцию, выполненную с возможностью подачи дополнительного топлива в зависимости по меньшей мере частично от сигнала, полученного от робота.
В качестве еще одного аспекта предлагается робототехническая система с заправочной станцией, содержащая робот, выполненный с возможностью использования воды для выполнения заданной задачи, резервуар робота, расположенный в роботе и предназначенный для хранения воды, и заправочную станцию, выполненную с возможностью подачи дополнительной воды в указанный резервуар.
В качестве другого аспекта изобретения предложена робототехническая система с заправочной станцией, содержащая робот с топливным элементом, выполненный с возможностью использования жидкости для выполнения заданной задачи, резервуар для топлива, расположенный в роботе, резервуар для жидкости, расположенный в роботе, и заправочную станцию, выполненную с возможностью подачи дополнительного топлива и дополнительной жидкости.
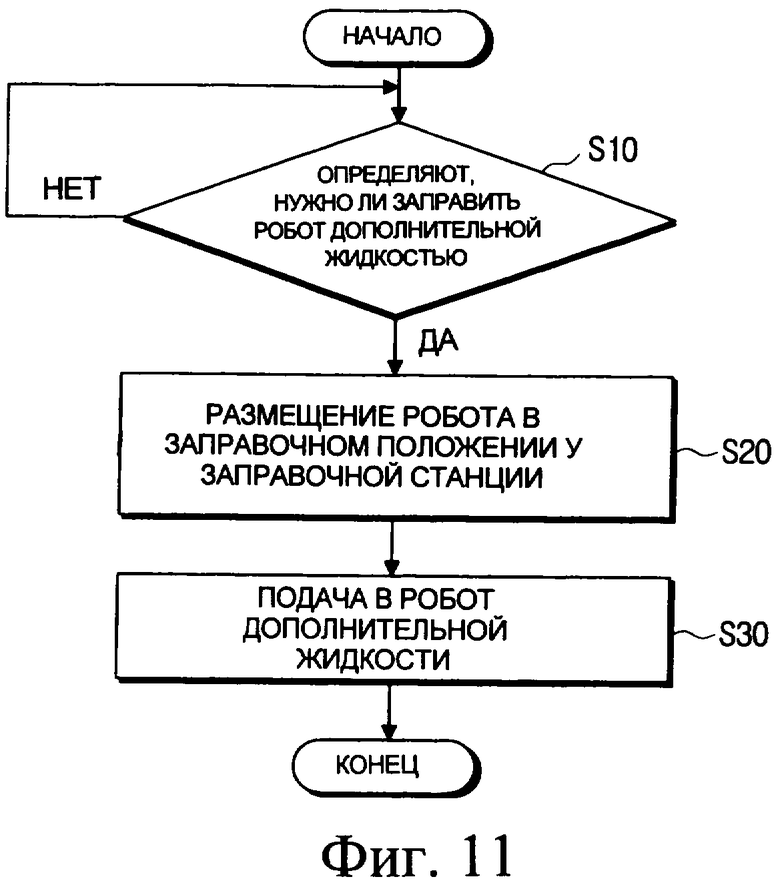
В качестве еще одного аспекта изобретения предложен способ заправки робота, включающий определение того, нуждается ли робот в дополнительной жидкости, размещение робота в положении заправки у заправочной станции, когда нужна дополнительная жидкость, и заправку робота дополнительной жидкостью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изложенные выше аспекты и признаки данного изобретения станут более очевидными из следующего описания вариантов выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 представляет собой вид, на котором изображена робототехническая система с заправочной станцией в соответствии с первым неограничивающим вариантом выполнения настоящего изобретения;
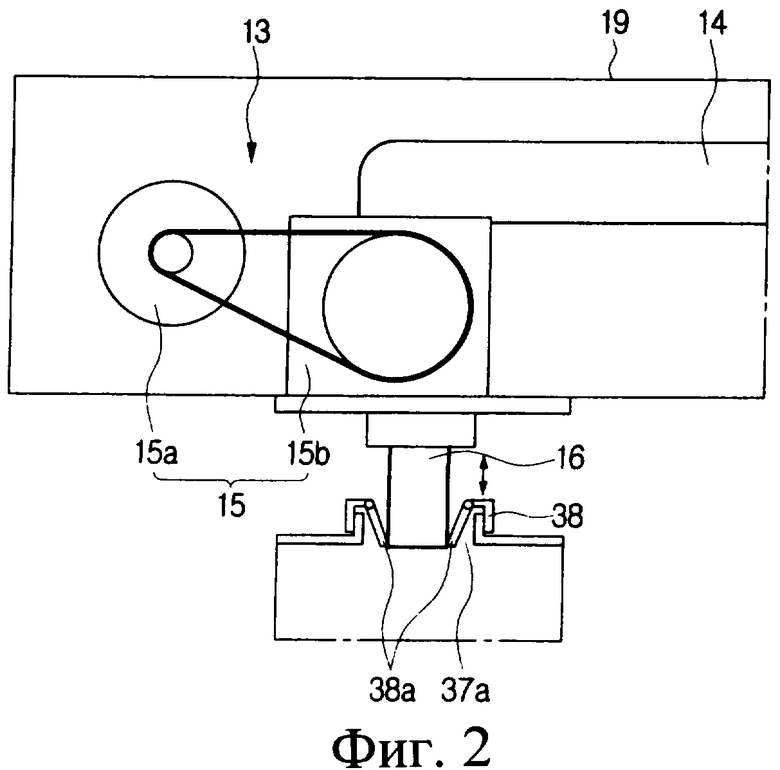
фиг.2 представляет собой вид, на котором изображен неограничивающий пример узла заправочной насадки робототехнической системы, показанной на фиг.1;
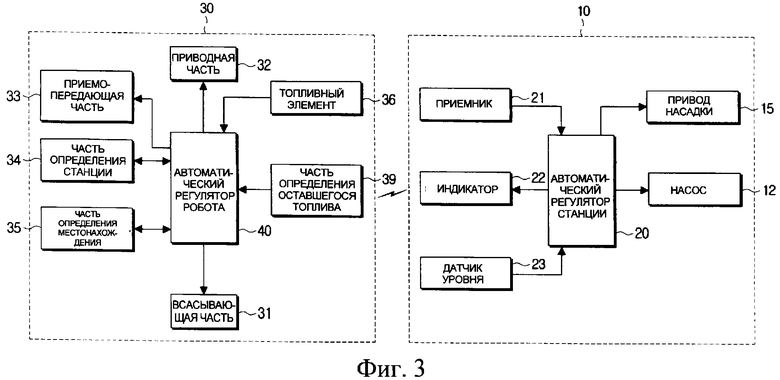
фиг.3 изображает блок-схему, на которой представлен неограничивающий пример работы робототехнической системы, показанной на фиг.1;
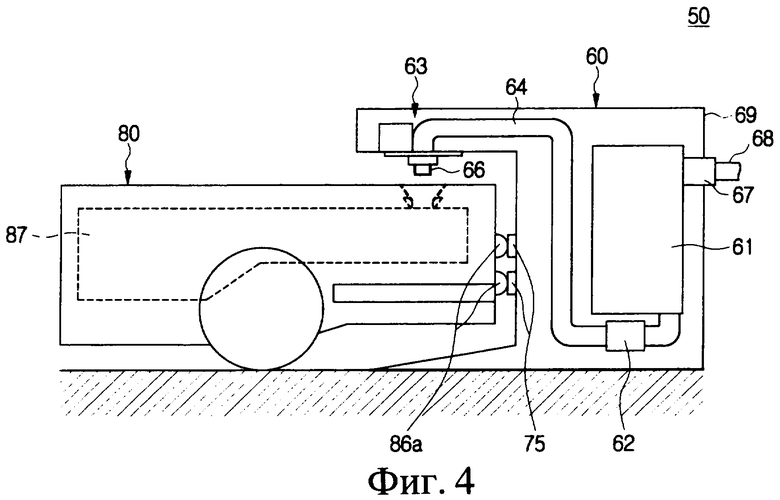
фиг.4 изображает робототехническую систему с заправочной станцией в соответствии со вторым неограничивающим вариантом выполнения настоящего изобретения;
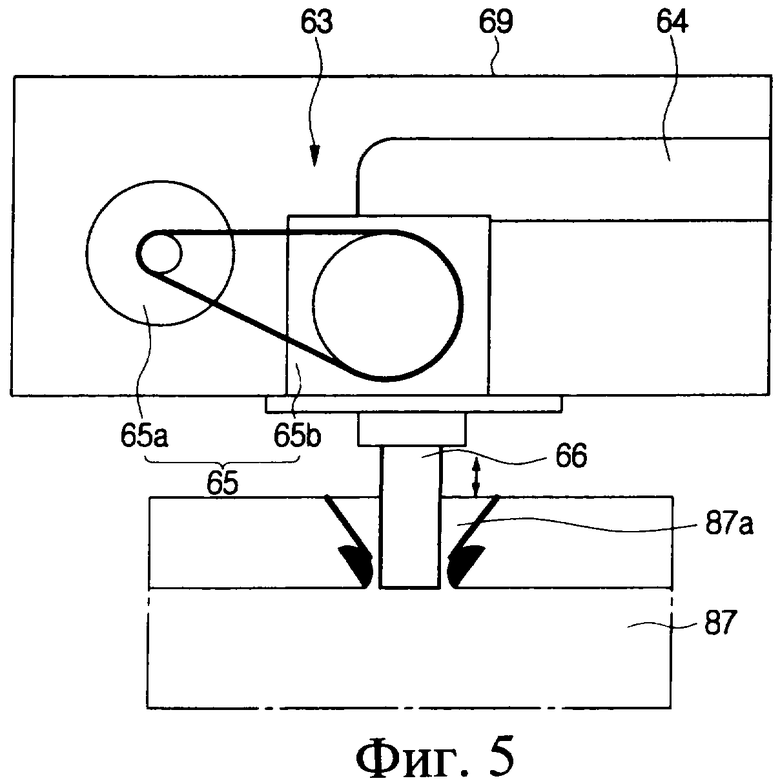
фиг.5 представляет собой вид, на котором изображен неограничивающий пример узла заправочной насадки робототехнической системы, показанной на фиг.4;
фиг.6 изображает блок-схему, на которой представлен неограничивающий пример работы робототехнической системы, показанной на фиг.4;
фиг.7 представляет собой вид, на котором изображен неограничивающий пример заправочной станции робототехнической системы, показанной на фиг.4;
фиг.8 изображает блок-схему, на которой представлен неограничивающий пример работы робототехнической системы, показанной на фиг.7;
фиг.9 представляет собой вид, на котором изображен неограничивающий пример робототехнической системы с заправочной станцией, в соответствии с третьим неограничивающим вариантом выполнения настоящего изобретения;
фиг.10 изображает блок-схему, на которой представлен неограничивающий пример работы робототехнической системы, показанной на фиг.9;
фиг.11 изображает блок-схему, на которой проиллюстрирован способ заправки для робототехнической системы с заправочной станцией;
фиг.12 изображает блок-схему, на которой представлены неограничивающие аспекты способа заправки, показанного на фиг.11.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже подробно описаны предпочтительные варианты выполнения данного изобретения со ссылкой на прилагаемые чертежи. Определенные в описании объекты, такие как конструктивное исполнение и элементы, являются лишь средствами лучшего понимания изобретения. Таким образом, очевидно, что настоящее изобретение может быть выполнено без определения этих объектов. Помимо того, хорошо известные функции или конструктивные исполнения могут быть опущены для краткости и ясности иллюстративных вариантов выполнения настоящего изобретения.
Первый неограничивающий пример настоящего изобретения описан со ссылкой на робот-пылесос. Робототехническая система в соответствии с настоящим изобретением может содержать станцию для заправки жидкостью и робот с резервуаром для жидкости.
Заправочная станция подает жидкость в резервуар для жидкости, расположенный в мобильном роботе. Заправочная станция может содержать, среди всего прочего, резервуар хранения, насос, узел заправочной насадки, автоматический регулятор и корпус. Автоматический регулятор может управлять насосом и узлом заправочной насадки, так что жидкость из резервуара хранения может быть подана в резервуар робота.
Робот перемещается и выполняет заданную работу, такую как уборка. Настоящее изобретение особенно применимо к роботам, которые используют жидкость для передвижения или для выполнения заданной работы. Например, один тип робота получает электроэнергию из топливного элемента, использующего жидкое топливо, такое как метанол. Другой тип робота может использовать воду для выполнения задач, таких как очистка водой, паровая чистка, влажная протирка или увлажнение.
Обратимся к фиг.1-3, на которых показана робототехническая система с заправочной станцией в соответствии с первым неограничивающим вариантом выполнения настоящего изобретения. Этот неограничивающий вариант выполнения относится к робототехнической системе с заправочной станцией, такой как робот, который может использовать метаноловый топливный элемент. Хотя этот неограничивающий вариант выполнения относится к метанолу, другие типы топлива, известные специалисту в данной области техники, также подпадают под объем настоящего изобретения. Со ссылкой на фиг.1-3, робототехническая система 1 с заправочной станцией в соответствии с первым вариантом выполнения настоящего изобретения может содержать заправочную станцию 10 и робот 30 с резервуаром 37.
Заправочная станция 10 может быть выполнена для заправки метанолом (или другим топливом) резервуара 37 робота 30. Заправочная станция 10 может содержать резервуар 11 хранения, насос 12, узел 13 заправочной насадки, автоматический регулятор 20 и корпус 19.
Резервуар 11 может хранить заданное количество метанола для заправки резервуара 37 робота 30. Резервуар 11 может быть намного больше, чем резервуар 37 робота 30. В результате резервуар 11 может наполнить резервуар 37 несколько раз.
Насос 12 может проточно сообщаться с резервуаром 11 и может подавать в резервуар 37 метанол, содержащийся в резервуаре 11. Предпочтительным может быть расположение насоса 12 в нижней части резервуара 11.
Узел 13 может проточно сообщаться с насосом 12 и может служить проходом, через который метанол подается в резервуар 37. Узел 13 может содержать соединительную трубку 14, заправочную насадку 16 и привод 15 насадки.
Соединительная трубка 14 может быть расположена между заправочной насадкой 16 и насосом 12. Метанол, выпускаемый насосом 12, может поступать к заправочной насадке 16 по соединительной трубке 14. Привод 15 насадки может быть выполнен с обеспечением совершения заправочной насадкой 16 возвратно-поступательного движения. Передний конец заправочной насадки 16 может быть вставлен во входное отверстие 37а резервуара 37. Таким образом, метанол не вытекает, когда он поступает из резервуара 11 в резервуар 37. Привод 15 может содержать приводной двигатель 15а и приводной механизм 15b. В качестве приводного механизм 15b может быть использован любой механизм, который способен преобразовывать вращательное движение двигателя 15а в прямолинейное движение. Когда насадка 16 передвигается вниз посредством двигателя 15а, передний конец насадки 16 может быть вставлен во входное отверстие 37а резервуара 37. Следовательно, метанол не вытекает, когда он поступает из резервуара 11 в резервуар 37.
Когда автоматический регулятор 20 станции получает сигнал о заправке от робота 30, он может управлять насосом 12 и узлом 13 для подачи в резервуар 37 метанола, находящегося в резервуаре 11. Другими словами, когда регулятор 20 получает сигнал о заправке от робота 30 через приемник 21, он в состоянии управлять двигателем 15а узла 13 для введения заправочной насадки 16 во входное отверстие 37а резервуара 37.
Затем автоматический регулятор 20 может запустить насос 12 для подачи метанола из резервуара 11 в резервуар 37. Насос 12 может быть насосом с постоянным расходом, как, например, дозирующий насос, который подает жидкость с постоянной скоростью. Таким образом, автоматический регулятор 20 может контролировать количество жидкости, подаваемой в резервуар 37, если он контролирует время работы насоса 12. Также автоматический регулятор 20 может остановить насос 12 при получении сигнала об остановке от автоматического регулятора 40 робота 30.
В корпусе 19 могут быть размещены резервуар 11, насос 12, узел 13 и автоматический регулятор 20. Заправочная станция 10 может быть установлена в корпусе 19 в заданном положении.
Заправочная станция 10 может предпочтительно содержать датчик 23 уровня и индикатор 22. Датчик 23 уровня может быть расположен в резервуаре 11 и может определять уровень жидкости (например, метанола), содержащейся в резервуаре 11. Индикатор 22 может отображать уровень жидкости, содержащейся в резервуаре 11, рабочее состояние заправочной станции 10, а также другую необходимую информацию. Автоматический регулятор 20 может подавать сигнал тревоги посредством индикатора 22, когда уровень жидкости, содержащейся в резервуаре 11, определенный датчиком 23, меньше требуемого. Этот сигнал может сигнализировать о необходимости пополнить жидкость, содержащуюся в резервуаре 11.
Робот 30 может перемещаться сам и выполнять поставленную задачу, используя энергию, полученную от метанолового топливного элемента 36. Робот 30 может содержать всасывающую часть 31, приводную часть 32, приемо-передающую часть 33, часть 35 определения местонахождения, часть 34 определения станции, топливный элемент 36, резервуар 37, часть 39 определения оставшегося топлива и автоматический регулятор 40 робота.
Всасывающая часть 31 может очищать поверхность, по которой перемещается робот 30, путем всасывания загрязнений с поверхности. Всасывающая часть 31 может содержать генератор разрежения, выполненный для создания всасывающего усилия, и узел пылесборника, выполненный для отделения и собирания загрязнений.
Приводная часть 32 дает возможность роботу 30 перемещаться в любом направлении. Приводная часть 32 обычно содержит колеса 32а и двигатели (не показаны), которые приводят в движение колеса 32а.
Приемо-передающая часть 33 может получать управляющий сигнал, передаваемый из устройства дистанционного управления (не показано), и может передать сигнал о заправке от автоматического регулятора 40 робота к заправочной станции 10.
Часть 35 определения местоположения может определять текущее местоположение робота 30. Часть 35 может использовать обычный способ определения местоположения, такой как способ с использованием камеры для наблюдения и/или приборной панели.
Часть 34 определения станции может определять текущее местоположение заправочной станции 10. Камера для наблюдения и/или приборная панель могут также содержаться в части 34. Также в эту часть могут быть включены ультразвуковые датчики или лазерные датчики. Передатчики для ультразвуковых или лазерных датчиков могут быть расположены на заправочной станции 10.
Топливный элемент 36 может снабжать робот 30 энергией для работы последнего. В то время как могут быть использованы топливные элементы различных типов, этот неограничивающий вариант выполнения использует метаноловый топливный элемент 36.
Резервуар 37 может быть выполнен для хранения заданного количества метанола, который потребляется во время работы робота 30. Резервуар 37 в своей верхней части может иметь входное отверстие 37а, в которое вставлена заправочная насадка 16. Также входное отверстие 37а может предпочтительно включать крышку 38, которая может быть открыта или закрыта посредством заправочной насадки 16. Другими словами, когда заправочная насадка 16 опускается, крышка 38 входного отверстия может быть открыта и заправочная насадка 16 может быть вставлена во входное отверстие 37а. Когда заправочная насадка 16 поднимается, входное отверстие 37а может автоматически закрыться для предотвращения вытекания или испарения жидкости, находящейся в резервуаре 37, через входное отверстие 37а. Крышка 38 в соответствии с неограничивающим вариантом выполнения настоящего изобретения может иметь две дверцы 38а, упруго поддерживаемые упругим элементом (не показан). Когда заправочная насадка 16 опускается, дверцы 38а крышки могут перемещаться вниз и заправочная насадка 16 может быть вставлена во входные отверстия 37а. Когда заправочная насадка 16 поднимается, дверцы 38а могут переместиться вверх посредством упругого элемента и закрыть входное отверстие 37а, как показано на фиг.1. Крышка 38 может представлять собой любую подходящую крышку входного отверстия. Например, может использоваться крышка для топливного бака автомобиля. Часть 39 определения оставшегося топлива может определять количество метанола, оставшегося в резервуаре 37, и может посылать сигнал о количестве оставшегося топлива в автоматический регулятор 40.
Автоматический регулятор 40 робота может быть выполнен для интерпретации управляющего сигнала, получаемого приемо-передающей частью 33. В соответствии с полученным управляющим сигналом автоматический регулятор 40 робота может управлять всасывающей частью 31, приводной частью 32, частью 35 определения местоположения и частью 34 определения станции для перемещения и выполнения заданной работы.
Более того, автоматический регулятор 40 робота может определять количество топлива, имеющегося в резервуаре 37, посредством сигналов, полученных от части 39 определения оставшегося топлива. Когда уровень топлива в резервуаре 37 падает ниже определенного уровня, автоматический регулятор 40 робота может переместить робот 30 к заправочной станции 10 для дозаправки. Другими словами, после того, как автоматический регулятор 40 робота определит местоположение заправочной станции 10 посредством части 34, он может управлять приводной частью 32 так, что робот 30 перемещается к заправочной станции 10. Робот может переместиться в положение, ближайшее к заправочной станции 10, так, что входное отверстие 37а резервуара 37 робота 30 будет находиться рядом с заправочной насадкой 16. Автоматический регулятор 40 робота может передать сигнал о запросе заправки заправочной станции 10. Автоматический регулятор 20 станции может затем управлять насосом 12 и узлом 13 заправочной насадки для заправки топливом резервуара 37 из резервуара 11. Когда уровень топлива в резервуаре 37 достигнет требуемого уровня, автоматический регулятор 40 робота может передать в заправочную станцию 10 сигнал запроса об остановке, чтобы заправочная станция 10 прекратила заправку метанолом.
Робот 30 может определить, что уровень топлива, имеющегося в резервуаре 37, находится ниже определенного (нижнего порогового) уровня. Нижний пороговый уровень может быть определен, основываясь на технических характеристиках резервуара 37 и топливного элемента 36.
Когда уровень топлива в резервуаре 37 падает ниже нижнего порогового уровня, регулятор 40 робота 30 может определить местоположение заправочной станции 10 с помощью части 34. После этого регулятор 40 может переместить робот 30 к станции 10. В это время насадка 16 станции 10 может находиться в верхнем положении, как показано на фиг.1. Автоматический регулятор 40 может использовать способы, известные специалистам в данной области техники, для установки робота 30 в заправочное положение.
Когда робот 30 достигает заправочного положения, регулятор 40 может передать станции 10 сигнал о заправке через приемо-передающую часть 33. Приемник 21 станции 10 может получить сигнал о заправке от робота 30 и может послать его автоматическому регулятору 20 станции. Автоматический регулятор 20 может управлять приводом 15 насадки узла 13 для перемещения заправочной насадки 16 вниз. Когда заправочная насадка 16 опускается, ее передний конец нажимает на дверцы 38а крышки так, что она входит во входное отверстие 37а резервуара 37, как показано на фиг.2.
Когда насадка 16 вставлена в отверстие 37а, автоматический регулятор 20 станции может дать сигнал насосу 12 начать подачу. При работе насоса 12 топливо из резервуара 11 может быть перекачано в резервуар 37 через соединительную трубку 14 и заправочную насадку 16. Автоматический регулятор 20 станции может дать сигнал насосу 12 остановиться после прошествия необходимого времени (которое может быть задано) или когда он получает сигнал об остановке от регулятора 40 робота. Регулятор 20 станции может вернуть насадку 16 в первоначальное положение. После того как дозаправка закончена, регулятор 40 робота 30 может управлять приводной частью 32 для возобновления заданной работы.
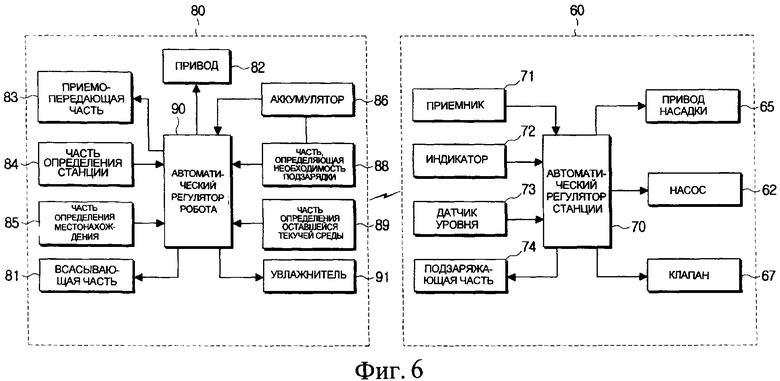
Обратимся к фиг.4-6, на которых показана робототехническая система с заправочной станцией в соответствии со вторым неограничивающим вариантом выполнения настоящего изобретения. Второй неограничивающий вариант выполнения относится к робототехнической системе 50 с заправочной станцией для робота 80, которая снабжается топливом в виде аккумулятора и использует жидкость, такую как воду, для выполнения по меньшей мере одной задачи. Робототехническая система 50 может содержать заправочную станцию 60 и робот 80, который может иметь резервуар 87.
Заправочная станция 60 может быть выполнена для снабжения резервуара 87 жидкостью, необходимой для выполнения по меньшей мере одного задания. В этом неограничивающем примере используется вода. Однако могут также использоваться и другие подходящие жидкости. Заправочная станция 60 может содержать резервуар 61 хранения, насос 62, узел 63 заправочной насадки, подзаряжающую часть 74, автоматический регулятор 70 станции и корпус 69.
Резервуар 61 хранения может хранить заданное количество воды для заправки резервуара 87 робота 80. Резервуар 61 может быть подсоединен к водопроводной трубе 68 для забора воды. Водопроводная труба 68 может иметь клапан 67 (например, автоматический клапан), который открывает и закрывает трубу 68. Представляется удобным заправлять резервуар 61 хранения водой тогда, когда тот подсоединен к водопроводной трубе 68 с клапаном 67. Давление воды на входе насоса 62 может поддерживаться в необходимых пределах, т.к. резервуар 61 поддерживает постоянным необходимое количество воды. Таким образом, насос 62 может подавать постоянное количество воды из резервуара 61 хранения в резервуар 87.
Подзаряжающая часть 74 может быть выполнена для подзарядки аккумулятора 86 робота 80 в соответствии с сигналом, полученным от автоматического регулятора 70 станции. Часть 74 может содержать подзаряжающие клеммы 75, соединенные с клеммами 86а аккумулятора.
Насос 62, узел 63 заправочной насадки, регулятор 70 станции и корпус 69 могут быть такими же или похожими на описанные выше в первом неограничивающем варианте выполнения. Привод 65 насадки узла 63 заправочной насадки может содержать приводной двигатель 65а и приводной механизм 65b. Когда уровень воды в резервуаре 61 хранения понижается ниже требуемого уровня, регулятор 70 станции может управлять автоматическим клапаном 67, так что тот открывается и вода может поступать по водопроводной трубе 68 в резервуар 61.
Далее, заправочная станция 60 может предпочтительно содержать датчик 73 уровня и индикатор 72. Датчик 73 может быть расположен в резервуаре 61 и может определять уровень жидкости (например, воды), содержащейся в резервуаре 61. Индикатор 72 может показывать уровень жидкости, содержащейся в резервуаре 61, рабочее состояние заправочной станции 60, а также другую необходимую информацию. Автоматический регулятор 70 станции может подавать сигнал тревоги посредством индикатора 72, когда уровень жидкости, содержащейся в резервуаре 61, определенный датчиком 73, меньше требуемого. Этот сигнал может сигнализировать о необходимости пополнить жидкость, содержащуюся в резервуаре 61.
Робот 80 может перемещаться сам и выполнять поставленную задачу, используя энергию, полученную от аккумулятора 86. Робот 80 может содержать всасывающую часть 81, приводную часть 82, приемо-передающую часть 83, часть 85 определения местонахождения, часть 84 определения станции, аккумулятор 86, резервуар 87, часть 89 определения оставшейся текучей среды, увлажнитель 91 и автоматический регулятор 90 робота.
Аккумулятор 86 может снабжать робот 80 энергией для работы последнего. Аккумулятор 86 может содержать часть 88, определяющую необходимость подзарядки, выполненную для определения состояния аккумулятора 86. Когда уровень мощности аккумулятора 86 падает ниже требуемой величины, часть 88 может послать сигнал запроса о подзарядке регулятору 90 робота. Таким образом, аккумулятор 86 может быть подзаряжен. Способы подзарядки аккумулятора 86, известные специалистам в данной области техники, подпадают под объем настоящего изобретения.
Резервуар 87 может содержать заданное количество текучей среды, которую робот 80 может использовать для выполнения требуемого задания. Резервуар 87 в своей верхней части может иметь входное отверстие 87а, в которое может быть вставлена насадка 66. Входное отверстие 87а может быть выполнено, по существу, в форме воронки. Хотя и не показана, крышка 38 входного отверстия при необходимости может быть расположена во входном отверстии 87а, как и в первом неограничивающем варианте выполнения. Часть 89 определения оставшейся текучей среды может быть выполнена для определения уровня текучей среды, имеющейся в резервуаре 87, и может посылать сигнал, показывающий определенный уровень, регулятору 90 робота.
В этом неограничивающем варианте выполнения задание, которое выполняет робот 80, включает также и увлажнение. Соответственно, робот 80 может также содержать увлажнитель 91. Увлажнитель 91 увеличивает влажность воздуха в соответствии с сигналом, полученным от автоматического регулятора 90 робота. Резервуар 87 может снабжать увлажнитель 91 водой.
Автоматический регулятор 90 робота может быть выполнен с обеспечением интерпретации управляющего сигнала, получаемого приемо-передающей частью 83. В соответствии с полученным управляющим сигналом автоматический регулятор 90 робота может управлять всасывающей частью 81, приводной частью 82, частью 85 определения местоположения и частью 84 определения станции для перемещения робота 80 и выполнения им заданной работы. Для выполнения необходимых заданий роботом можно управлять, как это известно специалистам в данной области техники.
Более того, регулятор 90 робота может определить количество текучей среды, запасенной в резервуаре 87, посредством сигналов, полученных от части 89. Когда уровень воды в резервуаре 87 падает ниже определенного уровня, регулятор 90 робота может переместить мобильный робот 80 к заправочной станции 60 для дозаправки водой резервуара 87 из резервуара 61. Способ, которым регулятор 90 робота может управлять дозаправкой воды мобильного робота 80 из резервуара 61, может быть похожим на тот, что описан выше в связи с первым неограничивающим вариантом выполнения.
Далее описана работа мобильной робототехнической системы 50 в соответствии со вторым неограничивающим вариантом выполнения. Робот 80 может определить, что уровень топлива, запасенного в резервуаре 87, упал ниже требуемого уровня. Требуемый уровень может быть определен, основываясь на технических характеристиках резервуара 87 и увлажнителя 91.
Когда резервуар 87 готов к дозаправке, регулятор 90 робота 80 может дать сигнал роботу 80 об окончании выполнения задания. Автоматический регулятор 90 робота может определить местоположение станции 60 с помощью части 84 определения станции. После этого регулятор 90 робота может заставить робот 30 переместиться к станции 60 в положение заправки. Заправочная насадка 66 станции 60 может находиться в верхнем положении, как показано на фиг.4.
Когда мобильный робот 80 находит заправочное положение, регулятор 90 робота может передать станции 60 сигнал о заправке жидкостью через приемо-передающую часть 83. Приемник 71 заправочной станции 60 может получить сигнал о заправке от робота 80 и может послать его автоматическому регулятору 70 станции. Автоматический регулятор 70 станции может управлять приводом 65 насадки узла 63 заправочной насадки для перемещения насадки 66 вниз. Когда насадка 66 опускается, ее передний конец может быть вставлен во входное отверстие 87а резервуара 87, как показано на фиг.5.
Когда насадка 66 вставлена во входное отверстие 87а, регулятор 70 станции может дать сигнал насосу 62 начать работу. При работе насоса 12 вода из резервуара 61 может быть перекачана в резервуар 87 через соединительную трубку 64 и заправочную насадку 66. Затем автоматический регулятор 70 станции останавливает насос 12 после прошествия необходимого времени или когда он получает сигнал об остановке от регулятора 90 робота. После того как дозаправка закончена, регулятор 90 мобильного робота 80 может управлять частью 82 для возобновления заданной работы.
Количество воды, запасенной в резервуаре 61 заправочной станции 60, уменьшается, когда заправочная станция 60 заправляет водой резервуар 87. Регулятор 70 станции может определить уровень воды в резервуаре 61 посредством датчика 73 уровня. Когда уровень жидкости в резервуаре 61 падает ниже требуемой величины, регулятор 70 станции может открыть клапан 67. Вода, вытекающая из водопроводной трубы 68, может наполнить резервуар 61. Когда уровень жидкости в резервуаре 61 достигает требуемой величины, регулятор 70 может закрыть клапан 67 для прекращения подачи жидкости.
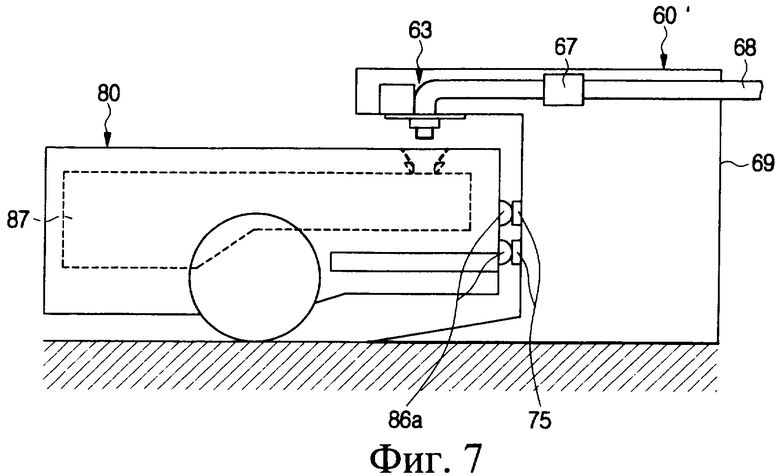
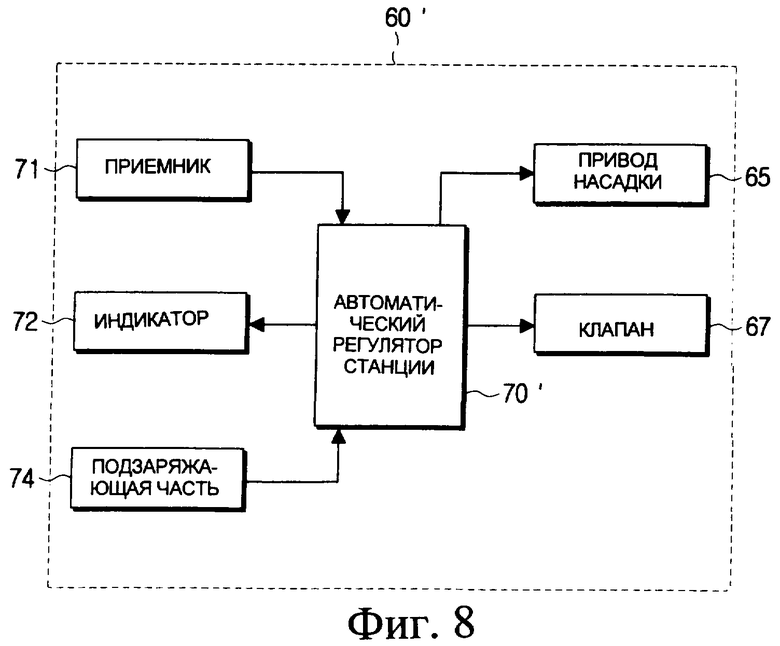
Обратимся к фиг.7 и 8, на которых показан другой неограничивающий вариант выполнения заправочной станции жидкостью. Заправочная станция 60' для заправки жидкостью может содержать водопроводную трубу 68, которая может быть напрямую соединена с узлом 63. Клапан 67 может быть расположен между узлом 63 и трубой 68 для открытия и закрытия последней. Заправочная станция 60' может и не содержать резервуар 61 и насос 62 неограничивающего второго варианта выполнения. Следовательно, при подаче воды в резервуар 87 робота 80 вода может напрямую подаваться из водопроводной трубы 68 в резервуар 87.
Со ссылкой на фиг.7 и 8, заправочная станция 60' может содержать узел 63 заправочной насадки, напрямую соединенный с водопроводной трубой 68. При получении сигнала о заправке от регулятора 90 робота регулятор 70 станции может открыть клапан 67 (например, автоматический клапан), так что вода начинает поступать из водопроводной трубы 68 в резервуар 87. При получении сигнала об остановке от регулятора 90 робота регулятор 70 станции может закрыть клапан 67 для прекращения подачи воды.
Хотя робот 80, описанный выше, может в качестве устройства, использующего текучую среду из резервуара 87, содержать увлажнитель 91, это приведено лишь для иллюстративных целей. Робот 80 может дополнительно или в качестве альтернативы содержать устройство чистки водой, устройство паровой очистки, устройство влажной протирки, а также и другие устройства очистки с использованием текучей среды, известные специалистам в данной области техники.
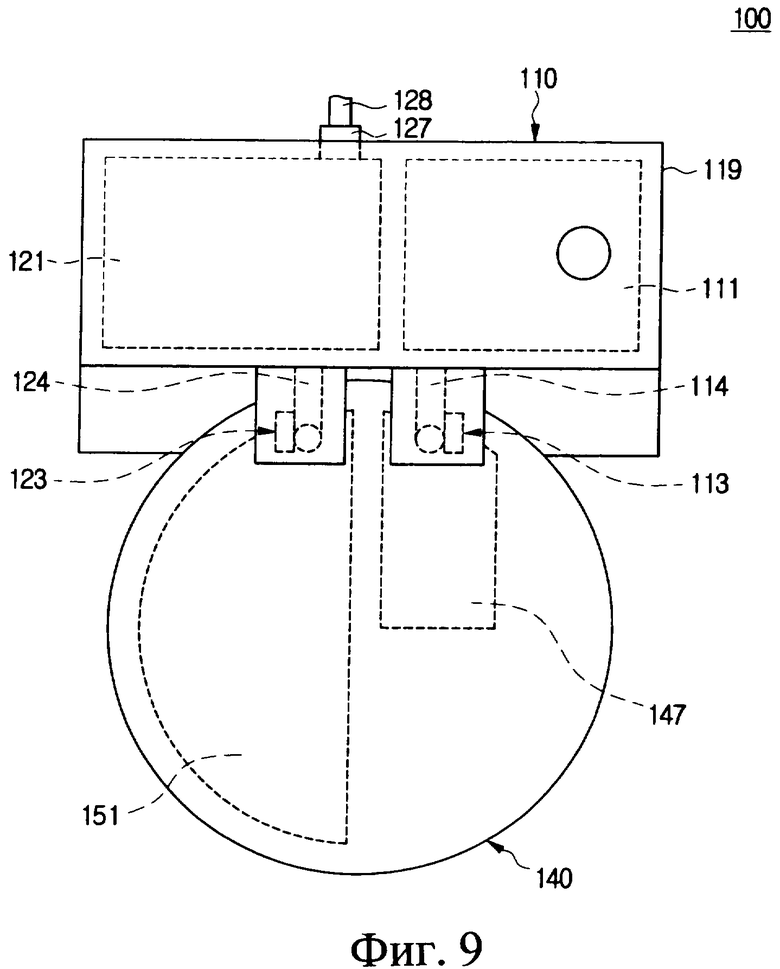
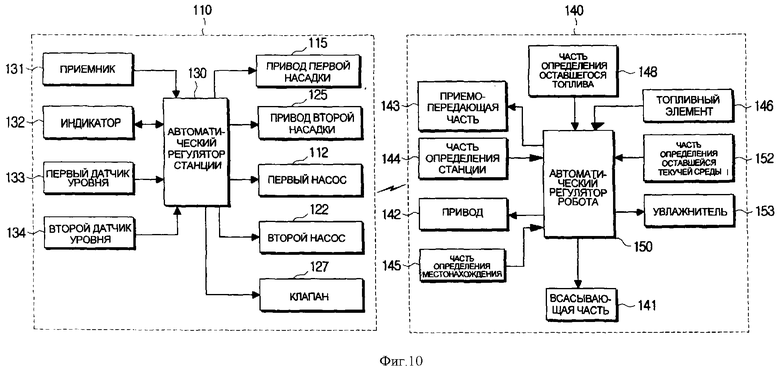
Обратимся к фиг.9 и 10, на которых показана робототехническая система с заправочной станцией в соответствии с третьим неограничивающим вариантом выполнения настоящего изобретения. Третий неограничивающий вариант выполнения содержит робототехническую систему 100, имеющую заправочную станцию для робота, который получает энергию от метанолового топливного элемента и выполняет требуемое задание, используя воду.
Робототехническая система 100, содержащая заправочную станцию в соответствии с третьим неограничивающим вариантом выполнения, содержит заправочную станцию 110 и робот 140 с топливным резервуаром 147 (например, для метанола) и с резервуаром 151 для текучей среды (например, воды). Станция 110 может быть выполнена для заправки метанолом (или другим топливом) и водой (или другими необходимыми жидкостями) соответственно, резервуар 147 и резервуар 151 робота 140. Заправочная станция 110 может содержать резервуар 111 для хранения, резервуар 121 для хранения, первый и второй насосы 112 и 122, первый и второй узлы 113 и 123 заправочной насадки, автоматический регулятор 130 станции и корпус 119.
Резервуар 111 хранения может хранить заданное количество топлива (например, метанола) для заправки резервуара 147 робота 140. Резервуар 121 может обеспечить резервуар 151 робота 140 заданным количеством текучей среды. Резервуар 121 может быть подсоединен к водопроводной трубе 128 для забора воды. Водопроводная труба 128 может иметь клапан 67 (например, автоматический клапан), который открывает и закрывает водопроводную трубку 128. Соединение резервуара 121 для хранения и трубы 68 с автоматическим клапаном 67 делает удобным заполнение водой резервуара 121.
Первый насос 112 может находиться в проточном соединении с резервуаром 111 и может подавать топливо (например, метанол), содержащееся в резервуаре 111, в резервуар 147. Первый насос 112 может быть предпочтительно расположен в нижней части резервуара 111. Второй насос 122 может проточно сообщаться с резервуаром 121 и подавать текучую среду, хранимую в резервуаре 121, в резервуар 151. Второй насос 122 может быть предпочтительно расположен в нижней части резервуара 121.
Первый и второй узлы 113 и 123 заправочной насадки могут находиться в проточном соединении соответственно с насосами 112 и 122 и могут служить проходами, через которые соответственно топливо и текучая среда поступают в резервуары соответственно 147 и 151. Первый и второй узлы 113 и 123 заправочной насадки могут содержать первую и вторую соединительные трубки соответственно 114 и 124, первую и вторую заправочные насадки (не показаны) и привод 115 и 125 соответственно первый и второй насадки.
Первая соединительная трубка 114 может быть расположена между первой заправочной насадкой и первым насосом 112. Метанол, выпускаемый насосом 112, может поступать к первой заправочной насадке по первой соединительной трубке 114. Вторая соединительная трубка 124 может быть расположена между второй заправочной насадкой и вторым насосом 122. Текучая среда, выпускаемая насосом 122, может поступать ко второй заправочной насадке по второй соединительной трубке 124.
Приводы 115 и 125 могут быть выполнены для совершения соответственно первой и второй заправочными насадками возвратно-поступательного движения вверх и вниз по прямой. Передний конец каждой заправочной насадки, первой и второй, может быть вставлен во входное отверстие либо резервуара 147, либо резервуара 151. Приводы 115 и 125 могут содержать приводной двигатель и приводной механизм. В качестве приводного механизма может быть использован любой механизм, который способен превращать вращательное движение приводного двигателя в прямолинейное движение заправочной насадки вверх и вниз.
Когда первая и вторая заправочные насадки передвигаются вниз посредством соответственно приводов 115 и 125, передний конец каждой заправочной насадки, первой и второй, может быть вставлен во входное отверстие либо резервуара 147, либо резервуара 151. Следовательно, метанол и текучая среда не вытекают, когда они поступают из резервуара 111 и резервуара 121 в резервуар 147 и резервуар 151.
Когда регулятор 130 станции получает сигнал о заправке от робота 140, он может управлять первым и вторым насосами 112 и 122 и первым и вторым узлами 113 и 123 для подачи в резервуар 147 метанола, находящегося в резервуаре 111, а в резервуар 151 - текучей среды, находящейся в резервуаре 121. Другими словами, когда автоматический регулятор 130 станции получает сигнал о заправке от робота 140 через приемник 131, он в состоянии управлять приводом 115 первого узла 113 для введения первой заправочной насадки во входное отверстие резервуара 147. После этого регулятор 130 станции может запустить насос 112 для подачи топлива из резервуара 111 в резервуар 147.
Когда регулятор 130 станции получает сигнал о заправке текучей средой от робота 140 через приемник 131, он может управлять приводом 125 второго узла 123 для введения второй заправочной насадки во входное отверстие резервуара 151. Затем регулятор 130 станции может запустить насос 122 для подачи текучей среды из резервуара 121 в резервуар 151. Первый и второй насосы 112 и 122 могут быть насосами с постоянным расходом, как, например, дозирующие насосы, которые подают жидкость с постоянной скоростью. Таким образом, регулятор 130 станции может управлять количеством жидкости, подаваемой в резервуары 147 и 151, если он контролирует время работы соответственно первого и второго насосов 112 и 122. Также регулятор 130 станции может остановить любой из насосов, 112 и 122, при получении сигнала об остановке от регулятора 150 робота 140, управляя таким образом количеством топлива и текучей среды, подаваемых в резервуары 147 и 151.
В корпусе 119 могут быть размещены резервуар 111, резервуар 121, первый и второй насосы 112 и 122, первый и второй узлы 113 и 123 и регулятор 130 станции. Заправочная станция 110 может быть установлена в заданном положении в корпусе 119.
Заправочная станция 110 может предпочтительно содержать первый и второй датчики 133 и 134 уровня и индикатор 132. Первый и второй датчики 133 и 134 могут быть расположены соответственно в резервуаре 111 и в резервуаре 121 и могут определять уровень топлива и текучей среды, содержащихся соответственно в резервуаре 111 и в резервуаре 121. Индикатор 132 может показывать уровень топлива и текучей среды, содержащихся соответственно в резервуарах 111 и 121, а также рабочее состояние заправочной станции 110. Автоматический регулятор 130 станции может подавать сигнал тревоги посредством индикатора 132, когда уровень топлива, содержащегося в резервуаре 111, определенный первым датчиком 133, и/или уровень текучей среды, содержащейся в резервуаре 121, определенный вторым датчиком 134, меньше требуемого.
Робот 140 может перемещаться сам и выполнять поставленную задачу, используя энергию, полученную от источника питания, такого как метаноловый топливный элемент 146. Робот 140 может содержать всасывающую часть 141, приводную часть 142, приемо-передающую часть 143, часть 145 определения местонахождения, часть 144 определения станции, топливный элемент 146, резервуар 147 для топлива, часть 148 определения оставшегося топлива, резервуар 151 для текучей среды, часть 152 определения оставшейся текучей среды, увлажнитель 153 и автоматический регулятор 150 робота.
Робот 140 может быть, по существу, таким же или похожим на робот 80, описанный в неограничивающем втором варианте выполнения, за исключением того, что он может содержать резервуар 147 и часть 148 определения оставшегося топлива. Топливный элемент 146, резервуар 147 и часть 148 могут быть похожи на описанные в первом неограничивающем варианте выполнения настоящего изобретения.
Согласно третьему неограничивающему варианту выполнения, изображенному на фиг.9 и 10, робот 140 посредством части 152 определения оставшейся текучей среды может определять, что уровень текучей среды, хранящейся в резервуаре 151, падает ниже требуемого уровня. Также робот 140 посредством части 148 определения оставшегося топлива может определять, что уровень топлива, запасенного в резервуаре 147, падает ниже требуемого уровня. Требуемый уровень текучей среды и требуемый уровень топлива могут быть определены, основываясь на технических характеристиках резервуара 151, увлажнителя 153, резервуара 147 и топливного элемента 146.
Способ, согласно которому мобильный робот 140 получает топливо и/или текучую среду, может, по существу, быть таким же, как и те, что описаны выше в связи с первым и вторым неограничивающими вариантами выполнения. Однако в соответствии с третьим неограничивающим вариантом выполнения робот 140 может одновременно заполнять резервуар 147 топливом, а резервуар 151 - водой. В результате частота, с которой робот 140 возвращается к станции 110, уменьшается, а время работы увеличивается.
Другой аспект настоящего изобретения показан на фиг.11-12. В робототехнической системе 1, 50 или 100 с заправочной станцией 10, 60 или 110 робот 30, 80 или 140 может определять уровень жидкости, находящейся в резервуаре 37, 87, или 147, или 151, и может определять, если этот уровень в резервуаре 37 или 87 низок (шаг S10). Когда уровень в резервуаре 37, 87, или 147, или 151 низок, робот 30, 80 или 140 может прекратить выполнение своего задания и переместиться в заправочное положение у заправочной станции 10, 60 или 110 (шаг S20).
После того как робот 30, 80 или 140 определит заправочное положение станции 10, 60 или 110, последняя подает жидкость в робот 30, 80 или 140 (шаг S30). Со ссылкой на фиг.12 процедура подачи жидкости ниже описана подробно. Когда робот 30, 80 или 140 находится в заправочном положении, регулятор 40, 90 или 150 робота 30, 80 или 140 может передать сигнал заправочной станции 10, 60 или 110 (шаг S31) о запросе заправки.
При получении сигнала о заправке заправочная станция 10, 60 или 110 может вставить заправочную насадку 16 или 66 во входное отверстие резервуара 37, 87, 147 или 151 робота 30, 80 или 140 (шаг S32). Другими словами, когда автоматический регулятор 20, 70 или 130 заправочной станции 10, 60 или 110 получает сигнал о дозаправке, он может управлять приводной частью насадки узла 13, 63, 113 или 123 для перемещения насадки 16 или 66 вниз. Затем насадка 16 или 66 может быть вставлена во входное отверстие резервуара 37, 87, 147 или 151 робота 30, 80 или 140.
Когда насадка 16 или 66 вставлена во входное отверстие резервуара 37, 87, 147 или 151, станция 10, 60 или 110 может начать подачу жидкости в резервуар 37, 87, 147 или 151 через насадку 16 или 66 (шаг S33). Другими словами, когда регулятор 20, 70 или 130 станции 10, 60 или 110 управляет насосами 12, 62, 114 или 124, жидкость из резервуара 11, 61, 111 или 121 подается в резервуар 37, 87, 147 или 151 робота 30, 80 или 140 через соединительную трубку 14, 64, 114 или 124 и насадку 16 или 66.
Когда дозаправка жидкостью завершена, заправочная станция 10, 60 или 110 может вытащить насадку 16 или 66 из входного отверстия робота 30, 80 или 140 (шаг S34). Другими словами, когда резервуар 37, 87, 147 или 151 робота 30, 80 или 140 наполнился жидкостью, регулятор 20, 70 или 130 станции 10, 60 или 110 может управлять приводной частью насадки для перемещения насадки 16 или 66. Затем насадка 16 или 66 может быть удалена из входного отверстия резервуара 37, 87, 147 или 151. Когда насадка 16 или 66 удалена, робот 30, 80 или 140 может возобновить требуемое задание.
В то время как с помощью этих неограничивающих вариантов выполнения была описана автоматическая дозаправка топливом и резервуаров текучей средой, ручная дозаправка также подпадает под объем настоящего изобретения. В то время как были описаны неограничивающие варианты выполнения настоящего изобретения, специалисты в данной области техники после ознакомления с идеей изобретения смогут придумать дополнительные варианты и модификации этих вариантов выполнения. Следовательно, прилагаемая формула изобретения включает все вышеуказанные варианты выполнения и все модификации, которые подпадают под сущность и объем изобретения.

Робототехническая система содержит робот, включающий узел пылесборника и выполненный с возможностью самостоятельного перемещения, резервуар робота, предназначенный для хранения жидкости, используемой во время его работы, и расположенный в роботе, и заправочную станцию. Определяют необходимость в дополнительной жидкости для робота, робот осуществляет самостоятельное перемещение к заправочному положению с расположением у заправочной станции. Робот, находящийся у заправочной станции, передает сигнал о заправке через приемо-передающую часть с осуществлением заправки робота посредством заправочной станции, выполненной с возможностью автоматического управления подачей дополнительной жидкости в зависимости от полученного сигнала о заправке, полученного от приемо-передающей части робота. Изобретение обеспечивает увеличение времени работы робота при более удобном его использовании. 5 н. и 14 з.п. ф-лы, 12 ил.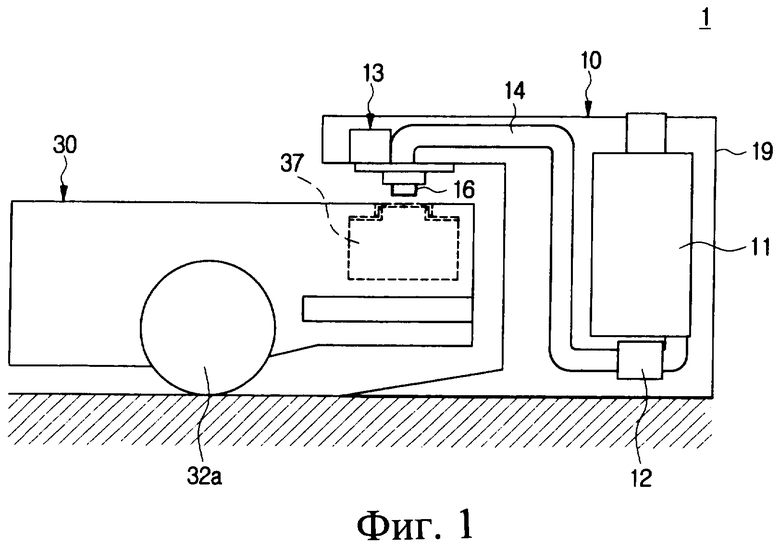
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| RU 94034395 A1, 10.09.1996 | |||
| Передвижная оросительная установка | 1991 |
|
SU1800482A1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ТУШЕНИЯ, ЛОКАЛИЗАЦИИ ПОЖАРА | 1998 |
|
RU2130793C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

