Изобретение относится к сельскому и лесному хозяйству, к поверхностному орошению водой или специальными растворами и может быть использовано для дистанционного полива сельскохозяйствен- ных угодий, тушения лесных пожаров, дезактивации и дегазации участков местности, строений и техники.
Целью изобретения является повышение мобильности установки,расширение об- ласти ее применения путем обеспечения возможности орошения труднодоступных участков местности и зон повышенной опасности для человека.
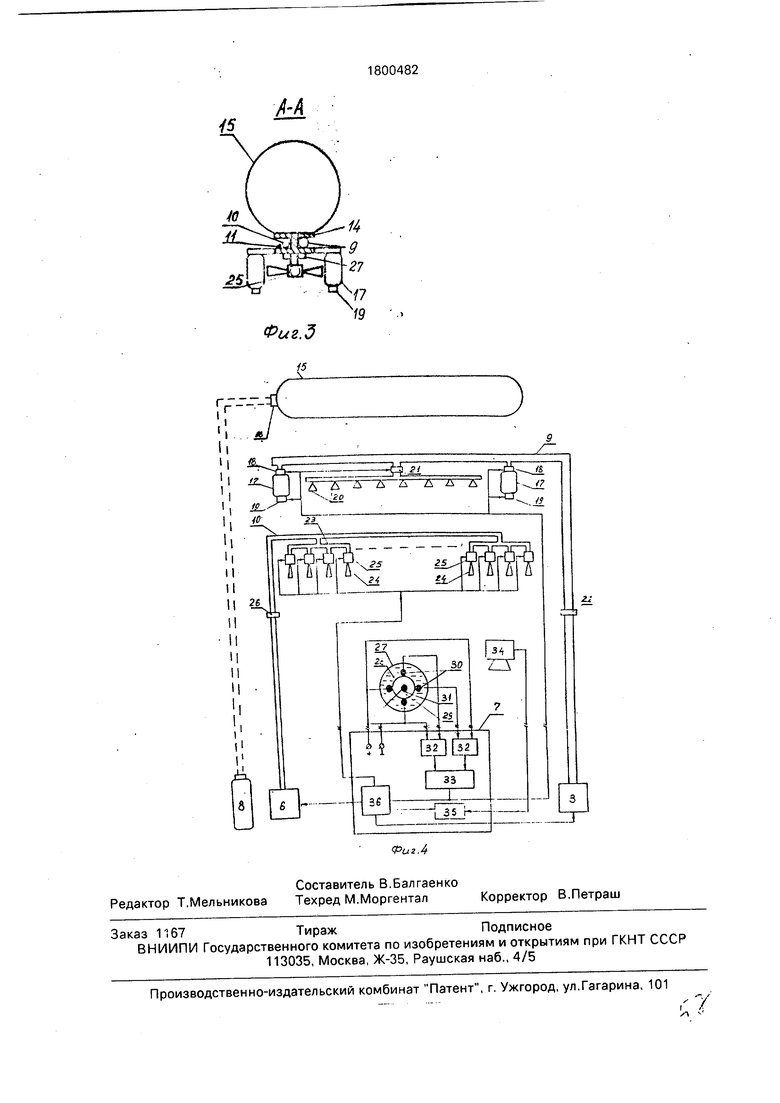
На фиг.1 изображена предлагаемая ус- тановка, общий вид; на фиг,2 - структурная схема установки; на фиг.З - сечение А-А на фиг.2; на фиг.4 - электропневмогидросхема установки.
Передвижная оросительная установка содержит наземный агрегат 1 и воздушную платформу 2, размещенную на летательном аппарате, например аэростате. Наземный агрегат 1, смонтированный на самоходном шасси, например на автомобиле, включает насосную станцию 3 с водозаборным устройством 4, резервуар 5 с жидкостью (водоем), воздушный компрессор 6, блок 7 дистанционного управления, баллон 8 со сжатым легким газом для заправки аэроста- тов, гибкий шланг 9, воздушную магистраль 10, канал 11 связи, телескопическую опору 12 для поддержки шланга 9 и воздушной магистрали 10 и кабеля канала 11 связи, объединенных в жгут и на большом рассто- янии поддерживаемых дополнительными аэростатами 13. Воздушная платформа 2 состоит из рамы 14, к которой прикреплен аэростат 15 с заправочно-дренажным вентилем 16 и на которой установлены балласт- ные резервуары 17 (на выносных консолях) с заправочным вентилем 18 и дренажным клапаном 19 с электрическими приводами, дождевальные насадки 20 на оросительном трубопроводе, соединенном со шлангом 9 через электрогидроклапан 21 и гидроразъем 22, реактивные двигатели 23, состоящие из четырех взаимно перпендикулярных реактивных сопел 24, подключенных к воздушной магистрали 10 высокого давления через электропневмоклапаны 25 и пневморазъем 26, датчик 27 положения системы стабилизации, например маятникового типа, представляющий собой чашку из
-
токопроводящего металла, частично запол ненную электролитом 28 так, что образуется пузырек 29 воздуха, в корпус чашки вмонтированы четыре периферийных электрода 30 и центральный электрод 31, периферийные электроды 30 попарно подсоединены к вхо-
5
1015
20 25 3035 4045 5055
ду двух усилителей-преобразователей 32, выходы которых через коммутатор 33 подключены к входам управления приводов вентилей 18 и клапанов 19 балластных резервуаров 17. Конструкционно электроды 30 и 31 могут входить в состав элементов блока 7 дистанционного управления, а могут быть отдельно смонтированы на раме 14 воздушной платформы 2. На раме 14 установлена миниатюрная телекамера 34, которая каналом связи (проводным или радио) соединена с телевизионным приемником 35, входящим в состав блока 7, в который также входит элемент 36 выдачи команд, выходы которого подключены к входам управления приводов насосной станции 3, воздушного компрессора б, вентилей 18, клапанов 19, электрогидроклапана 21 и пневмоклапанов 25.
Цикл эксплуатации установки включает три основных этапа; 1) транспортировка к месту орошения (дезактивации, дегазации, тушения пожара) и подготовка к работе; 2) работа установки по орошению местности; 3) свертывание установки.
Передвижная оросительная установка, смонтированная на специальном автомобиле, доставляется к месту проведения работ. Здесь она приводится в рабочее состояние. Для чего к гидроразъему 22 и пневморазъе- му 26 подсоединяются гибкий шланг 9 и воздушная магистраль 10. К электрическому разъему платформы подсоединяется кабель для образования канала 11 связи. Этот канал 11 может быть образован посредством радиоприемопередатчиков, К заправочно- дренажному вентилю 16 присоединяется баллон 8 со сжатым легким газом и производится наполнение легким газом (гелием или природным газом) аэростата 15 и, по мере необходимости, дополнительных аэростатов 13. Одновременно при помощи насосной станции 3 через водозаборное устройство 4 из водоема или специально транспортируемого резервуара 5 до определенного уровня наполняются балластные резервуары 17. По мере наполнения аэростата 15 легким газом образуется подъемная сила и платформа 2 поднимается в воздух. Высота подъема регулируется путем равномерного заполнения (опорожнения) балластных резервуаров 17. Для этого блок 36 подает команды на открытие и закрытие вентилей 18 и клапанов 19. После подъема платформы 2 на необходимую высоту осуществляется операция по ее горизонтирова- нию и центрированию. Центрирование производится до совмещения суммарного вектора тяги реактивных двигателей 23 с плоскостью, проходящей через центр масс
воздушной платформы 2, что позволит исключить потери тяги двигателей 23 на создание паразитных моментов относительно центра масс платформы. Горизонтирование платформы 2 производится с использованием датчика 27 положения маятникового типа, представляющего собой два взаимно перпендикулярных уровня. При отклонении платформы 2 от плоскости горизонта воздушный пузырек 29 смещается, что приводит к неодинаковой площади касания электродов 30 с электролитом 28 и изменению величины электрического сигнала, снимаемого с периферийных электродов 30. Этот сигнал поступает на входы усилителей- преобразователей 32, которые совместно с датчиком 27 образуют дифференциальную схему. Сигналы с выхода усилителей-преобразователей 32 несут информацию о величине и направлении отклонения платформы 2 от плоскости горизонта. В коммутаторе 33 происходит суммирование сигналов и распределение выходных управляющих сигналов на приводы соответствующих вентилей 18 и клапанов 19 балластных резервуаров 17. Центрирование осуществляется путем включения двигателей 23 поочередно для создания тяги в двух взаимно перпендикулярных направлениях с последующим гори- зонтированием платформы 2 описанным выше способом.
После выполнения подготовительных операций блок 7 дистанционного управления подает команды приводам электроклапанов 25 на включение реактивных двигателей 23 для перемещения платформы 2 в район орошения. По мере удаления платформы 2 от наземного агрегата 1 для поддержания гибкого шланга 9 и других коммуникаций используются телескопические опоры 12 и дополнительные аэростаты 13. После выхода платформы 2 в зону орошения подается команда на открытие элек- трогидроклапана 21, через который вода или специальный раствор поступает к дождевальным насадкам 20 оросительного трубопровода. Таким образом осуществляется поверхностное орошение. Качество орошения и маршрут передвижения платформы 2 контролируются при помощи теле- визионной установки, включающей телекамеру 34 и телевизионный приемник 35.
По окончании орошения подается команда на закрытие электрогидроклапана 21 и изменение направления тяги двигателей 23 для перемещения платформы 2 к наземному агрегату 1. При этом осуществляется свертывание воздушных коммуникаций. После чего платформа 2 опускается на землю,
демонтируется, ее узлы размещаются на штатных местах для транспортировки.
Наличие в оросительной установке дистанционно управляемой воздушной платформы 2, укрепленной на аэростате или дирижабле, позволяет повысить мобильность установки, увеличить район возможного орошения, обеспечить поверхностное орошение без механического воздействия
0 на почву, а также орошение на значительном удалении от водоисточника в труднодо- ступных районах и зонах опасных для человека. Эффект от применения предлагаемой установки заключается в расширении
5 сферы ее применения и исключении вредных воздействий на окружающую среду и человека.
Формула изобретения
1. Передвижная оросительная установ0 ка, включающая расположенную на наземном транспортном средстве насосную станцию, нагнетательная магистраль которой сообщена с водоисточником, а напорная магистраль посредством гибкого
5 шланга соединена с оросительным тпубоп- роводом, снабженным дождевальными насадками и установленным на летательном аппарате, и блок управления, первый выход которого соединен с управляющим входом
0 привода насосной станции, отличающаяся тем, что, с целью повышения мобильности установки и расширения области ее применения путем обеспечения возможности орошения труднодоступных участков
5 местности, летательный аппарат снабжен системами стабилизации и передвижения, входы управления исполнительных элементов которых подключены к второму, третьему и четвертому выходам блока управления,
0 а входы последнего соединены с выходами датчика положения системы стабилизации, при этом на оросительном трубопроводе перед дождевальными насадками установлен электрогидроклапан, вход управления кото5 рого связан с вторым выходом блока управления.
2. Установка поп.1,отличающая- с я тем, что блок управления содержит два усилителя-преобразователя, входы которых
0 являются входами блока управления, а выходы подключены к входам коммутатора, при этом выход последнего служит вторым выходом блока управления и объединен с первым выходом элемента выдачи команд,
5 второй,третий и четвертый выходы которого являются первым, третьим и четвертым выходами блока управления.
3. Установка по пп.1 и 2, отличаю - щ а я с я тем, что исполнительные элементы системы передвижения летательного аппарата выполнены в виде электропневмокла- панов, установленных в пневмолинии высокого давления, соединяющей сопла реактивных двигателей с нагнетательным патрубком воздушного компрессора, вход управления привода которого является первым входом исполнительных элементов системы передвижения летательного аппарата, вторым входом которых служат входы управления приводов электропнев- моклапанов.
4. Установка по пп.1-3, отличающаяся тем, что исполнительные элементы системы стабилизации летательного аппарата выполнены в виде заправочных венти0
лей и дренажных клапанов, установленных на входе и выходе балластных резервуаров, сообщенных посредством гидролинии с нагнетательной магистралью насосной станции, при этом входы управления приводов заправочных вентилей и дренажных клапанов объединены и являются входом исполнительных элементов системы стабилизации летательного аппарата.
5. Установка по пп.1-4, от л и ч а ю ща- я с я тем, что она снабжена телевизионной камерой, размещенной на летательном аппарате и соединенной каналом связи с телевизионным приемником, установленным в блоке управления и связанным с пятым выходом элемента выдачи команд.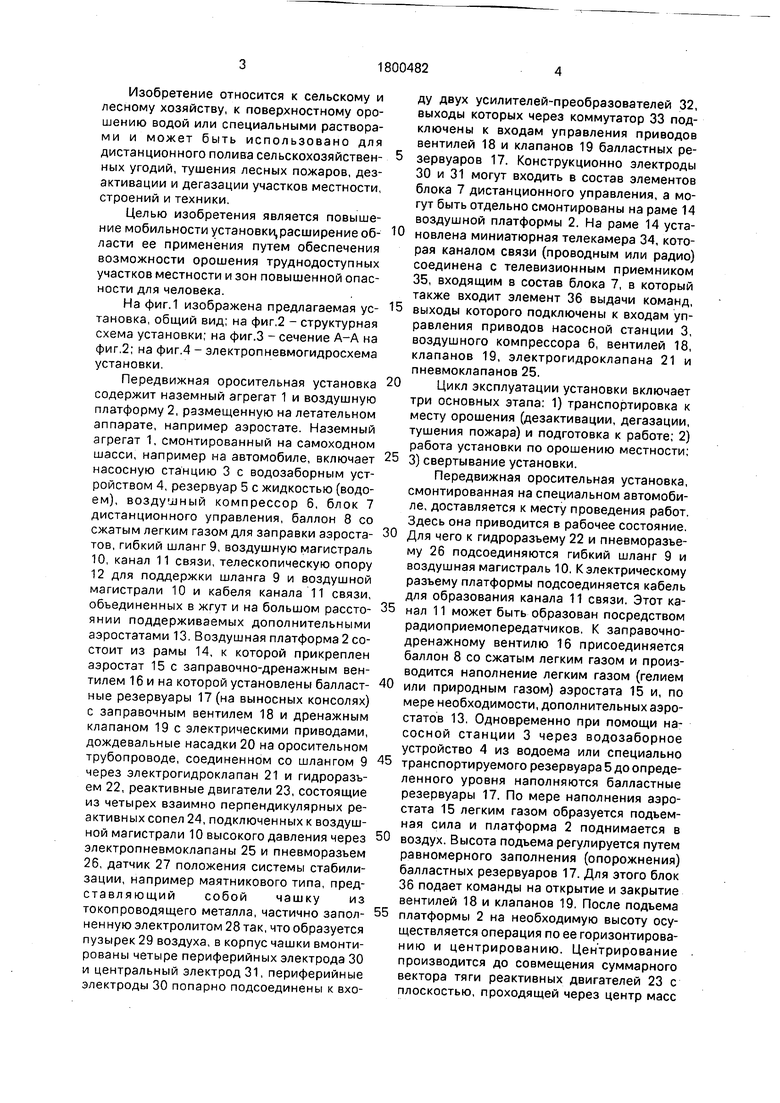

| название | год | авторы | номер документа |
|---|---|---|---|
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Дождевальная установка | 1988 |
|
SU1644824A1 |
| Система обнаружения воздушных и наземных целей | 2019 |
|
RU2712468C1 |
| Дождевальная установка | 1980 |
|
SU869699A1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ С ОДНОВРЕМЕННЫМ ВНЕСЕНИЕМ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2019 |
|
RU2726542C1 |
| ДИРИЖАБЛЬ-ТРАНСФОРМЕР И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ В КАЧЕСТВЕ ХРАМА И КОНЦЕРТНОГО ЗАЛА | 2020 |
|
RU2746962C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| СИСТЕМА ДЛЯ ПОЛИВА СЕЛЬСКОХОЗЯЙСТВЕННЫХ УГОДИЙ И СПОСОБ ПОЛИВА | 2016 |
|
RU2622176C1 |

Использование: в сельском хозяйстве, при поверхностном орошении водой или специальными растворами. Сущность изобретения: установка предназначена для дистанционного полива сельскохозяйственных угодий, дезактивации и дегазации местности, строений и техники. Она может быть также использована для тушения пожаров на труднодоступных участках местности (лесные массивы, горные склоны и т.д.). Установка выполнена в виде наземного агрегата 1 и платформы 2 с дождевальными насадками, размещенной на дирижабле. Наземный агрегат 1 смонтирован на мобильном основании, например автомобиле, и включает насосную станцию с водозабор- ным.устройством 4, воздушный компрессор и.блок дистанционного управления. Платформа 2 поддерживается в воздухе при по13V мощи дирижабля 5 и перемещается под воздействием реактивных двигателей, работающих на сжатом воздухе. Для ориентации платформы 2 в пространстве на ней установлены датчик положения системы стабилизации и балластные резервуары. Дождевальные насадки и реактивные двигатели соединены с наземным агрегатов 1 посредством гибкого шланга и воздушной магистрали, которые конструктивно объединены в жгут и поддерживаются в воздухе при помощи телескопических опор и дополнительных аэростатов 13. Управление перемещением платформы 2 в воздухе и включение дождевальных насадок осуществляется блоком дистанционного управления. Контроль за перемещением и качеством орошения осуществляется при помощи установленной на платформе телекамеры. Изобретение позволяет за счет применения дирижабля повысить мобильность устройства, расширить зону поверхностного орошения без механического воздействия на почву, проводить орошения в труднодоступных местах и исключить непосредственное нахождение человека в зоне проведения работ. 4 з.п. ф-лы, 4 ил. ел С 00 о о 4 00 ю
Физ.2
Фиг.4
Составитель В.Балгаенко Редактор Т.Мельникова Техред М.Моргентал
Корректор В.Петраш
| Передвижное оросительное устройство | 1934 |
|
SU41277A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
