Устройство относится к измерительной технике и может быть использовано для определения углового положения различных объектов, например подвижных конструктивных элементов грузоподъемных кранов, в частности для измерения угла азимута грузоподъемного крана.
Известно устройство для измерения угла азимута и углового положения стрелы грузоподъемного крана, содержащее оптическую систему, первый и второй детекторы которой установлены на поворотной платформе крана. Оптические оси детекторов направлены на источники света, расположенные вне грузоподъемного крана, а выходы детекторов подключены к входам бортового компьютера, выполненного с возможностью вычисления угловых положений стрелы с грузом и платформы крана [1].
Недостатком этого технического решения является невысокая надежность устройства при работе в условиях плохой оптической видимости - при высоких уровнях запыленности, при дожде, снегопаде и т.д.
Более распространенным является устройство для измерения угла, содержащее потенциометр, ось которого связана с подвижным конструктивным элементом грузоподъемного крана, и источник постоянного напряжения, подключенный к первому и второму выводам потенциометра, третий вывод которого соединен с входом аналого-цифрового преобразователя [2].
Недостатком этого устройства является ограниченный диапазон измеряемых угловых перемещений. Это вызвано наличием разрыва в контактной системе потенциометра в момент перехода его движка с конца на начало резистивного элемента.
Наиболее близким к предложенному по совокупности существенных признаков и достигаемому результату является устройство для измерения угла поворота, содержащее измерительный преобразователь, выполненный в виде двух магниточувствительных элементов, формирующих два электрических сигнала, пропорциональных синусу и косинусу угла между этими элементами и постоянным магнитом, связанным с измеряемым углом поворота, и промежуточный преобразователь, выполненный на основе микроконтроллера и осуществляющий преобразование выходных сигналов измерительного преобразователя в выходной сигнал устройства, удобный для передачи по линии связи или для последующей обработки [3].
Достоинством этого устройства является возможность измерения угла в пределах полного поворота объекта, в частности его вала.
Однако при этом не обеспечивается возможность изменения верхнего и нижнего пределов измерений угла (или диапазона измеряемых углов). При необходимости измерения угла поворота в пределах, отличающихся от 360°, необходимо применение дополнительного механического редуктора, что приводит к усложнению устройства.
Кроме того, отсутствует возможность реализации известного устройства без внешнего источника питания.
Еще одним недостатком известного технического решения является отсутствие возможности измерения угла путем контроля линейного перемещения зубьев колеса, закрепленного на объекте - на конструктивном элементе, угловое положение которого необходимо измерить.
Техническими результатами, на достижение которых направлено предложенное техническое решение, являются:
- обеспечение возможности программного изменения пределов измерения угловых перемещений;
- упрощение конструкции устройства за счет исключения редуктора, в том числе в случаях, когда пределы измерения превышают 360°;
- обеспечение возможности измерения угла без применения внешнего источника электрического питания;
- обеспечение возможности измерения угла путем контроля как угла поворота какого-либо вала объекта, так и линейного перемещения зубьев зубчатого колеса, соединенного с этим объектом.
В предложенном устройстве для измерения угла, содержащем, по меньшей мере, один измерительный преобразователь, выполненный с возможностью преобразования измеряемого угла в электрический сигнал, и промежуточный преобразователь, вход которого подключен к выходу измерительного преобразователя, причем промежуточный преобразователь выполнен на основе микроконтроллера с возможностью преобразования выходного сигнала измерительного преобразователя в выходной сигнал устройства, удобный для передачи по линии связи или для последующей обработки или регистрации, указанный технический результат достигается за счет того, что измерительный преобразователь выполнен с возможностью формирования импульсного или цифрового инкрементального выходного сигнала или измерительный преобразователь выполнен с возможностью формирования абсолютного выходного сигнала, а промежуточный преобразователь выполнен с возможностью преобразования этого абсолютного сигнала в импульсный или цифровой инкрементальный сигнал, причем микроконтроллер промежуточного преобразователя выполнен с возможностью программного умножения этого инкрементального сигнала на целое число М и последующего подсчета полученных импульсов или прямого подсчета импульсов инкрементального сигнала. При этом величина множителя М и информационная емкость L счетчика импульсов предварительно определены из условия получения необходимых пределов измерений угла поворота и записаны в энергонезависимую память микроконтроллера или дополнительного запоминающего устройства, подключенного к микроконтроллеру, а промежуточный преобразователь выполнен с возможностью преобразования состояния указанного счетчика в упомянутый выходной сигнал устройства. При этом, в частности:
- устройство дополнительно содержит автономный источник питания, подключенный к выводам питания промежуточного преобразователя или его микроконтроллера и, при необходимости, измерительного преобразователя. Питание устройства может осуществляться также от встроенного электромагнитного или пьезоэлектрического генератора, выполненного с возможностью преобразования механической энергии измеряемого угла поворота в электрическую энергию, причем выход генератора подключен к выводам питания промежуточного преобразователя и/или измерительного преобразователя. При этом между выходом генератора и автономным источником энергии может быть подключен дополнительный преобразователь тока или напряжения;
- микроконтроллер и энергонезависимая память микроконтроллера или дополнительного запоминающего устройства выполнены с возможностью программного изменения чисел М и L;
- измерительный преобразователь выполнен в виде инкрементального энкодера с двухфазным выходом, промежуточный преобразователь выполнен с возможностью определения направления углового перемещения по сдвигу фаз между двумя выходными сигналами энкодера, а также с возможностью реверсивного подсчета результата умножения инкрементального сигнала в зависимости от этого направления перемещения;
- измерительный преобразователь выполнен в виде двух измерителей расстояния до зубчатого колеса, размещенных со сдвигом, равным или близким к четверти шага зубьев, промежуточный преобразователь выполнен с возможностью определения направления углового перемещения по сдвигу фаз между выходными сигналами двух измерителей, а также с возможностью реверсивного подсчета результата умножения инкрементального сигнала в зависимости от этого направления перемещения, причем измеряемый угол является угловым положением указанного зубчатого колеса или устройство дополнительно оснащено указанным зубчатым колесом, угловое положение которого соответствует измеряемому углу или пропорционально ему за счет применения дополнительного передаточного устройства;
- микроконтроллер выполнен с возможностью выявления моментов времени включения и отключения внешнего напряжения питания устройства, с возможностью записи содержимого счетчика импульсов в энергонезависимую память микроконтроллера или дополнительного запоминающего устройства в момент этого отключения, а также с возможностью перезаписи этого содержимого из энергонезависимой памяти микроконтроллера или дополнительного запоминающего устройства в счетчик импульсов в момент включения внешнего напряжения питания устройства;
- счетчик импульсов выполнен с использованием энергонезависимых ячеек памяти микроконтроллера или дополнительного запоминающего устройства;
- промежуточный преобразователь содержит цифроаналоговый преобразователь, по меньшей мере, один вход которого подключен, по меньшей мере, к одному выходу микроконтроллера, а выход цифроаналогового преобразователя непосредственно или через дополнительную схему согласования подключен к выходу устройства либо промежуточный преобразователь содержит контроллер и/или драйвер мультиплексного канала обмена данными, например, последовательного интерфейса CAN или LIN, по меньшей мере, один вход которого подключен, по меньшей мере, к одному выходу микроконтроллера, а выход подключен к выходу устройства. В последнем случае контроллер мультиплексного канала обмена данными может также входить в состав микроконтроллера промежуточного преобразователя. Промежуточный преобразователь может содержать также трансивер или приемопередатчик беспроводной связи, выполненный с возможностью реализации последовательного канала обмена данными, например, по протоколу Bluetooth, Wi-Fi, ZigBee или IrDA, причем, по меньшей мере, один вход трансивера или приемопередатчика подключен, по меньшей мере, к одному выходу микроконтроллера.
Реализация устройства для измерения углов поворота, в частности, подвижных конструктивных элементов грузоподъемных кранов с приведенными отличительными признаками позволяет без применения механического редуктора осуществить программное изменение пределов измерения угла, в том числе реализовать многооборотный измеритель угла, а также осуществлять измерения без внешнего источника электрического питания. Поэтому указанные отличительные признаки находятся в прямой причинно-следственной связи с основным и с дополнительными указанными техническими результатами.
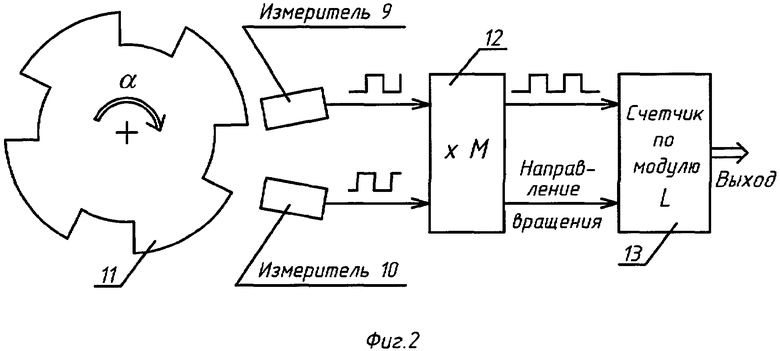
На фиг.1 приведен пример реализации предложенного устройства для измерения угла, на фиг.2 - функциональная схема, поясняющая алгоритм его работы.
Устройство для измерения угла (фиг.1) в общем случае содержит, по меньшей мере, один измерительный преобразователь 1 и соединенный с ним промежуточный преобразователь 2, выполненный на основе микроконтроллера 3, осуществляющего обработку выходного сигнала измерительного преобразователя 1. Выходной сигнал устройства, удобный для передачи по линии связи или для последующей обработки или регистрации, формируется при помощи микроконтроллера 3 и соединенного с ним трансивера, контроллера или приемопередатчика 4.
Промежуточный преобразователь 2 может содержать запоминающее устройство 5, подключенное к микроконтроллеру 3, и автономный источник питания 6, подключенный к выводам питания одного или нескольких функциональных блоков устройства.
Питание устройства может осуществляться также от встроенного электромагнитного (реализованного с использованием электромагнитной индукции) или пьезоэлектрического генератора 7, осуществляющего преобразования механической энергии измеряемого угла поворота α в электрическую энергию. При необходимости, на выходе генератора 7 может быть установлен дополнительный преобразователь тока или напряжения 8, осуществляющий согласование уровня выходного напряжения генератора 7 с напряжением автономного источника питания 6 или с напряжением питания всего устройства.
В зависимости от конкретного варианта реализации предложенного устройства, отдельные функциональные блоки, приведенные на фиг.1, могут отсутствовать. Устройство может также сдержать дополнительные функциональные блоки, не приведенные на фиг.1.
Измерительный преобразователь 1 формирует импульсный или цифровой инкрементальный выходной сигнал. Измерительный преобразователь 1 может также формировать абсолютный выходной сигнал, например, в виде параллельного кода или напряжения, значение или величина которого определяется текущим положением (абсолютным значением) угла поворота α. В последнем случае промежуточный преобразователь 2 при помощи микроконтроллера 3 осуществляет преобразование этого абсолютного сигнала в импульсный или цифровой инкрементальный сигнал. Если абсолютный выходной сигнал представлен в виде напряжения, то микроконтроллер содержит встроенный аналого-цифровой преобразователь.
Инкрементальный сигнал, полученный непосредственно от измерительного преобразователя 1 или сформированный микроконтроллером 3, содержит информацию о значении угла поворота α в виде электрических импульсов, количество которых соответствует величине изменения (увеличения или уменьшения) угла поворота. Если вал или иной конструктивный элемент, угловое положение которого необходимо измерить, остается неподвижным, то импульсы в инкрементальном сигнале отсутствуют. Соответственно, текущее значение результата измерения α и, соответственно, угловое положение объекта определяется посредством подсчета данных импульсов.
При первом подключении напряжения питания в устройстве необходимо произвести определение абсолютного положения объекта (привязку исходного или нулевого положения). Это осуществляется, например, путем установки объекта (угла α) в фиксированное положение и записи заранее определенного значения угла, например нулевого значения, в счетчик импульсов либо в память микроконтроллера 3 или запоминающего устройства 5 с последующей перезаписью в счетчик импульсов. Дальнейший отсчет значений угла α производится от этого записанного значения.
Если при отключении внешнего напряжения питания устройства абсолютное значение угла необходимо сохранить, то в устройстве используется автономный источник питания 6. Абсолютное значение угла может быть также сохранено, если микроконтроллер 3, используя встроенную или внешнюю схему контроля снижения напряжения питания, например компаратор или аналого-цифровой преобразователь, выявляет моменты времени включения и отключения внешнего напряжения питания и далее при отключении напряжения питания осуществляет запись последнего результата измерения угла α, т.е. содержимого счетчика импульсов, в ячейки энергонезависимой памяти - в EEPROM микроконтроллера 3 или в энергонезависимое (Flash Memory) запоминающее устройство 5 и, соответственно, при включении напряжения питания осуществляет обратную перезапись, восстанавливая содержимое счетчика.
Аналогичный результат может быть получен в случае реализации счетчика с использованием энергонезависимых ячеек памяти. В этом случае, например, после каждого изменения состояния счетчика импульсов, реализованного программно микроконтроллером 3, микроконтроллер осуществляет запись его состояния в собственную энергонезависимую память или в энергонезависимую память запоминающего устройства 5. Благодаря этому, отключение внешнего источника питания в любой момент времени не приводит к потере информации об абсолютной величине измеряемого угла, содержащейся в счетчике импульсов.
Измерительный преобразователь 1 может быть выполнен в виде инкрементального, например оптического или контактного, энкодера с двухфазным выходом. В этом случае микроконтроллер 3 промежуточного преобразователя 2 по числу импульсов определяет величину изменения угла α (т.е. величину Δα) и одновременно по сдвигу фаз между двумя выходными сигналами энкодера определяет направление углового перемещения.
Измерительный преобразователь может быть выполнен также в виде двух измерителей расстояния 9 и 10 до зубчатого колеса 11 (фиг.2), размещенных со сдвигом, равным или близким к четверти шага зубьев. В этом случае микроконтроллер 3 промежуточного преобразователя 2 аналогичным образом определяет величину Δα и направление углового перемещения.
Выходной сигнал устройства, в зависимости от варианта реализации трансивера, контроллера или приемопередатчика 4, может быть представлен как в аналоговой, так и в цифровой форме. В последнем случае выходной сигнал может быть сформирован как в последовательном, так и в параллельном коде.
Если устройство имеет аналоговый выходной сигнал, то микроконтроллер 3 или трансивер, контроллер или приемопередатчик 4 содержит цифроаналоговый преобразователь. Если же устройство имеет цифровой выходной сигнал, то трансивер, контроллер или приемопередатчик 4 выполнен на основе соответствующей микросхемы, реализующей, например, протокол мультиплексного канала обмена данными - CAN или LIN и т.п. Контроллер мультиплексного канала обмена данными может также входить в состав микроконтроллера 3. Устройство может содержать также трансивер или приемопередатчик 4 беспроводной связи, реализующий, совместно с микроконтроллером 3, канал последовательного обмена данными по протоколу Bluetooth, Wi-Fi, ZigBee или IrDA.
В общем случае зубчатое колесо 11 связано с объектом - конструктивным элементом, угловое положение которого необходимо измерить при помощи некоторого передаточного механизма, например зубчатой передачи.
Предположим, что ведущее зубчатое колесо этой передачи, непосредственно связанное с объектом, имеет число зубьев N, а ведомое зубчатое колесо, связанное с рассматриваемым устройством, - число зубьев М.
В этом случае, угол поворота объекта γ связан с измеряемым углом поворота α соотношением

Основным рабочим параметром измерительного преобразователя 1 является количество импульсов К на один оборот углового перемещения α.
Соответственно, количество импульсов инкрементального выходного сигнала измерительного преобразователя 1, соответствующее полному повороту объекта (γ=360°), равно

Число Х в общем случае является дробным, т.е. целого числа X, соответствующего одному полному обороту объекта (γ=360°), может не существовать. В этом случае определение текущего значения угла γ путем прямого подсчета количества выходных импульсов инкрементального выходного сигнала измерительного преобразователя 1 (или измерителей 9 и 10) не представляется возможным из-за возникающей при этом методической погрешности.
Для исключения этой погрешности микроконтроллер 3 промежуточного преобразователя 2 в предложенном устройстве осуществляет программное умножение инкрементального сигнала на указанное число М, что на фиг.2 иллюстрирует блок 12.
В итоге получается целое число импульсов

Далее количество импульсов, полученное в результате этого умножения, программно подсчитывается микроконтроллером 3 (блок 13 на фиг.2). При этом информационная емкость (количество различных состояний или модуль) программного счетчика устанавливается равным L - числу импульсов, соответствующему полному обороту объекта (γ=360°).
В общем случае, для обеспечения возможности измерения угла поворота при реверсивных перемещениях объекта указанный программный счетчик реализуется реверсивным, т.е. направление его счета определяется направлением изменения углов α и γ, которое выявляется микроконтроллером 3 по сдвигу фаз измерительного преобразователя 1.
В итоге, содержимое программного счетчика импульсов микроконтроллера 3 однозначно соответствует углу поворота объекта γ. Далее микроконтроллер 3 осуществляет преобразование состояния указанного счетчика в упомянутый выходной сигнал устройства. Это преобразование может включать в себя масштабирование сигнала, преобразование в последовательный код для передачи по мультиплексному каналу обмена данными или по радиоканалу и т.п.
Погрешность и диапазон измерения углов α и γ зависят от значений К, М и L. Величина К определяет точность (дискретность) измерений и определяется конструкцией измерительного преобразователя 1 или числом зубьев колеса 11, а величины М и L зависят от параметров передаточного механизма и определяют пределы измерений угла поворота объекта γ.
Значения М и L заранее определяются, например, при проектировании устройства или при его настройке непосредственно на объекте, записываются в энергонезависимую память микроконтроллера 3 или подключенного к нему запоминающего устройства 5 и используются в программе работы микроконтроллера 3. Соответственно, путем выбора значений М и L в предложенном устройстве обеспечивается возможность реализации измерителя угловых перемещений с любыми наперед заданными пределами измерений угла, а также возможность программного изменения этих пределов измерения, в том числе непосредственно в процессе работы устройства. В частности, реализуется многооборотный измеритель угла без применения механического редуктора, что упрощает конструкцию устройства.
При реализации устройства может быть проведена факторизация чисел М и L. Если в результате этой факторизации выявляются общие множители, возможно сокращение значений чисел М и L, что несколько упрощает устройство, но не меняет его техническую сущность. В частном случае, когда число L делится на число М без остатка, сокращенное число М' становится равным единице, т.е. необходимость умножения инкрементального сигнала отсутствует. В этом случае осуществляется прямой, в общем случае реверсивный, подсчет количества импульсов инкрементального сигнала.
Электрическое питание устройства может осуществляться от внешнего источника питания, от автономного источника питания 6, а также от дополнительного генератора 7, преобразующего механическую энергию перемещения объекта в электрическую энергию. Возможность применения этого генератора обусловлена тем, что необходимость измерения угла возникает, как правило, только при его изменении. При этом, в случае необходимости, выходное напряжение генератора 7 преобразуется по уровню при помощи преобразователя тока или напряжения 8. Такая необходимость возникает когда, например, генератор 7 выполнен пьезоэлектрическим и формирует импульсы высокого напряжения. В этом случае для рационального использования энергии этих импульсов для подзарядки автономного источника энергии целесообразно понижение выходного напряжения генератора, например, при помощи импульсного трансформатора.
Из изложенного следует, что в предложенном устройстве обеспечивается возможность программного изменения пределов измерения угловых перемещений какого-либо объекта, а также реализация многооборотного измерителя угла без применения механического редуктора. Это обеспечивает возможность создания универсального измерителя угла и упрощает его конструкцию. Одновременно, за счет использования механической энергии измеряемого параметра, обеспечивается работоспособность устройства без внешнего источника электрического питания.
Источники информации
1. Патент ЕР 672889 А2, МПК5 G01B 11/16, 20.09.1995.
2. Ограничитель нагрузки крана ОНК-140-13. Новые нормативные материалы по безопасной эксплуатации подъемных сооружений. Вып.2, 1999. - М.: Изд-во ПИО ОБТ, с.47-86.
3. Патент RU 2206869 С2, МПК7 G01B 7/30, В66С 13/46, 20.06.2003.
Изобретение относится к измерительной технике и может быть использовано для определения углового положения подвижных конструктивных элементов грузоподъемных кранов. Сущность изобретения заключается в том, что устройство содержит измерительный преобразователь и промежуточный преобразователь, выполненный на основе микроконтроллера и осуществляющий преобразование выходного сигнала измерительного преобразователя в выходной сигнал устройства, удобный для передачи по линии связи или для последующей обработки. Измерительный преобразователь формирует инкрементальный выходной сигнал или такой сигнал формируется в промежуточном преобразователе из абсолютного выходного сигнала измерительного преобразователя. Микроконтроллер промежуточного преобразователя осуществляет программное умножение этого инкрементального сигнала на целое число М и последующий реверсивный или нереверсивный подсчет полученных импульсов. При этом величина множителя М и информационная емкость счетчика импульсов определены из условия получения необходимых пределов измерений углов поворота, записаны в энергонезависимую память микроконтроллера или дополнительного запоминающего устройства и могут быть изменены программно. Устройство может дополнительно содержать автономный источник питания и генератор для его подзарядки. Выходной сигнал устройства может быть представлен в аналоговой или в цифровой форме или передан в какое-либо другое устройство по беспроводному каналу обмена данными. Технический результат изобретения достигается тем, что изобретение обеспечивает возможность программной установки пределов измерения угла, упрощение конструкции устройства за счет исключения редуктора, возможность измерения угла без применения внешнего источника электрического питания и возможность измерения угла путем контроля как угла поворота какого-либо вала, так и линейного перемещения зубчатого колеса. 13 з.п. ф-лы, 2 ил.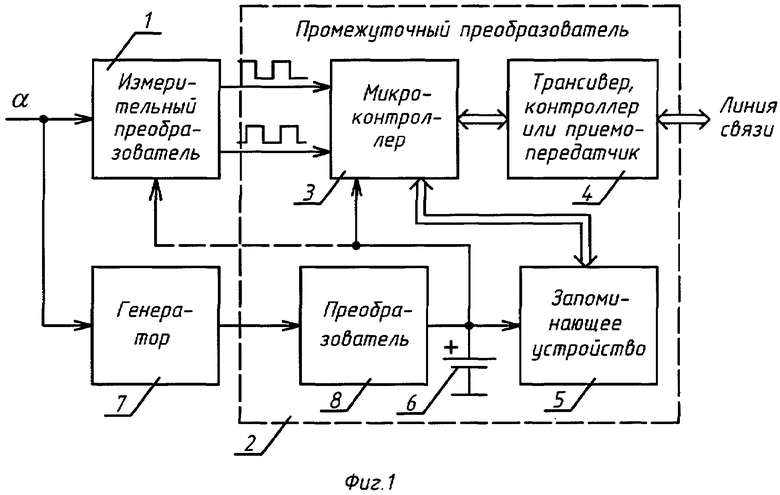
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2268233C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206869C2 |
| DE 3019385, 27.11.1980 | |||
| EP 0672889, 20.09.1995. | |||

