1 Область техники, к которой относится изобретение.
Изобретение относится к крановым предохранительным устройствам, а именно к ограничителям движения башенных подъемных кранов при работе в стесненных условиях, создаваемых неподвижными объектами.
2 Уровень техники.
Известны способы и устройства ограничения движений крана, включающие операции предварительного задания разрешенных зон с использованием кулачков и конечных выключателей, которые применяются для осуществления блокировки перемещения кранов и его элементов (“Устройство для программного управления механизмом поворота и вылета стрелы”. А.С. СССР №464099, В 66 С 13/48, 1966 г.).
Недостатком этих способов и устройств являются существенные ограничения по заданию зон ограничения, трудоемкость переналадки при изменении положения препятствий и необходимость использования кабельных соединений, размещаемых на подкрановой площадке.
Известно изобретение “Указатель положения препятствий для стрелового крана” (А.С. СССР №1104095, В 66 С 23/88, 1984 г.), которое обеспечивает повышение безопасности работы крана в стесненных условиях с помощью индикации препятствий на дисплее. Устройство содержит датчики угла наклона, поворота стрелы, высоты подъема груза, датчик угла наклона стрелы, а также преобразователи сигналов и дисплей.
Недостатком устройства является отсутствие автоматического управления механизмами крана и необходимость для оператора крана одновременно наблюдать за дисплеем и реальным положением груза на крюке крана.
Известны системы координатной защиты, например, фирмы Liebherr (по каталогам фирмы), и приведенные в заявке РФ №2093452, В 66 С 13/18, 15/00, 23/88, 1997 г., в которых используются микроЭВМ, устанавливаемые непосредственно на подъемном кране. В память микроЭВМ с помощью клавиатуры заносятся контуры зон, где запрещена работа, и микроЭВМ, определяя с помощью датчиков положение элементов подъемного крана, формирует сигналы блокировки его механизмов для предотвращения попадания стрелы или груза в запрещенные зоны.
Эти системы, наиболее близкие к предлагаемой, требуют использования на кране сложной аппаратуры с дисплеем и устройством ввода информации, которые должны выдерживать тяжелые климатические и механические условия работы, а также высокопрофессионального персонала для ввода параметров ограничения движений крана и обслуживания аппаратуры, что обусловливает ограниченное использование таких систем на большинстве башенных кранов.
3 Сущность изобретения.
Техническая задача состоит в построении системы автоматической координатной защиты работы крана в стесненных условиях, учитывающей положения элементов крана относительно объектов, расположенных на строительной площадке, без использования сложных электронных устройств и разветвленных кабельных соединений.
Предлагаемым изобретением решается задача создания системы автоматической координатной защиты для башенных подъемных кранов, работающих в стесненных условиях.
Отличительными признаками предлагаемой системы координатной защиты являются:
- разделение зон ограничения по типам ограничения;
- задание зон ограничения в соответствии с планом производства работ;
- разделение задач по вводу зон ограничений и расчетам для формирования признаков ограничения и задач по определению местоположения крана на строительной площадке, принятию решения и выдачи сигналов управления приводами крана.
В предлагаемой системе приняты следующие типы зон ограничения при работе крана в стесненных условиях:
- зона без ограничений;
- зона с ограничением по любому элементу стрелы;
- зона с ограничением по вылету груза;
- зоны с ограничением по высоте подъема груза;
- запретная зона ограничения по любому элементу стрелы;
- запретная зона ограничения по вылету груза;
- опасная зона, в которой выдается звуковой сигнал.
Типы зон ограничения в соответствии с требованиями нормативных документов по безопасности проведения строительных работ определяются объектами, расположенными на строительной площадке в зоне достижения рабочих органов крана. Дифференциация зон ограничения по типам позволяет оптимизировать работу крана с соблюдением требуемых норм. Конфигурация и расположение зон ограничения соответствуют конфигурации и расположению объектов на строительной площадке.
Запретные зоны формируются вокруг зон ограничения (объектов), их ширина задается с учетом требований нормативных документов (габаритные размеры поднимаемых грузов, высота подъема и пр.).
Задание зон ограничения, запретных и опасных зон производится на ПЭВМ типа IBM PC, в которую загружено специализированное программное обеспечение (ПО). По заданным длине подкранового пути и максимальному вылету (длине стрелы) на экране монитора ПЭВМ чертится строительная площадка, разбитая на дискретные элементы, размер и количество которых определяется точностью измерений соответствующих параметров. С помощью манипулятора “мышь” и клавиатуры каждому элементу строительной площадки присваивается тип зоны (разными цветами на экране монитора ПЭВМ) в соответствии с представленным планом производства работ. После задания всех зон на ПЭВМ производится расчет, в результате которого формируется числовой массив, каждый элемент которого сопоставлен элементу строительной площадки и представляет собой восьмиразрядное двоичное число, каждый бит которого предназначается для управления соответствующим механизмом крана.
Сформированный массив данных записывается в перепрограммируемое постоянное запоминающее устройство (ППЗУ) блока параметров строительной площадки, который устанавливается в блок управления системы координатной защиты.
В блоке управления, расположенном в кабине крана, по сигналам от датчиков положения крана на подкрановом пути, азимутального положения стрелы, вылета и высоты подъема груза определяется пространственное положение крана и его рабочих органов на строительной площадке. По совокупности этих параметров из ППЗУ считывается соответствующий элемент массива, который содержит информацию о разрешенных и запрещенных движениях крана и его органов.
Разделение функций ввода информации и предварительного расчета на ПЭВМ позволяет резко упростить аппаратуру, устанавливаемую на кране, так как отпадает необходимость в сложном и малонадежном устройстве ввода (клавиатуре), сложном решающем устройстве и универсальном устройстве отображения информации. Кроме того, снижаются требования к квалификации работников, обслуживающих аппаратуру на кране.
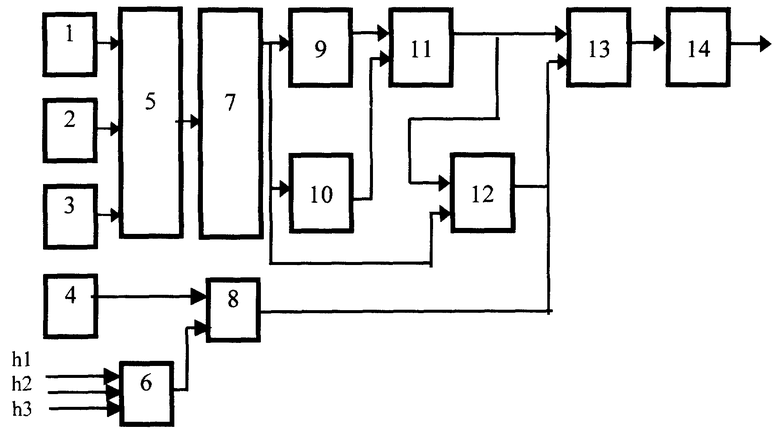
На чертеже показана структурная схема системы координатной защиты башенного крана.
Система содержит аналоговые датчики положения крана на подкрановом пути 1, азимутального положения стрелы 2, вылета груза 3 и высоты подъема груза 4. Сигналы датчиков 1-3 коммутируются аналоговым мультиплексором 5 на вход аналого-цифрового преобразователя (АЦП) 7, преобразующего аналоговые сигналы датчиков в двоичный код. С выхода АЦП цифровой код поступает на входы регистров 9, 10, при этом в регистр 9 записывается код положения крана на подкрановом пути, а в регистр 10 - код углового положения стрелы крана. Совокупность этих параметров однозначно определяет пространственное положение крана и его стрелы на строительной площадке и используется в качестве адресных сигналов для ППЗУ 11, в котором хранится информация о сигналах управления приводами крана, а также сигналах предупреждения о вхождении крана в опасную зону. Эта информация из ППЗУ 11 переписывается в выходной регистр 13. Кроме того, в ППЗУ 11 содержится информация о допустимом вылете груза для всех возможных положений крана на подкрановой площадке, которая сравнивается с текущим значением вылета на схеме сравнения 12. Если текущий вылет груза больше допустимого, то в соответствующий разряд выходного регистра 13 записывается сигнал блокировки работы привода вылета. Сигналы с выходного регистра подаются на блок 14 управления приводами крана. При попадании конца стрелы крана или груза в опасную зону система формирует общий предупредительный сигнал для крановщика, а в тех случаях, когда стрела крана или груз попадают в запрещенную зону, формируются сигналы блокировки приводов крана. При этом система не запрещает включать приводы, позволяющие вывести кран из запрещенной зоны.
Канал обработки высоты подъема груза обеспечивает оперативное задание требуемого значения высоты в зоне ее ограничения. Это достигается тем, что в соответствии со значениями вылета груза и азимутального положения стрелы из ППЗУ выбирается код управления аналоговым коммутатором 6, который соответствует номеру зоны ограничения высоты. Этот управляющий код подключает к аналоговому компаратору 8 один из резисторов, с помощью которых производится задание уровня высоты h1-h3. На второй вход компаратора поступает сигнал с выхода датчика высоты подъема груза 4. Если высота груза превышает заданный уровень (h1-h3), на выходе компаратора 8 формируется сигнал управления, который записывается в выходной регистр 13 и далее передается в блок управления приводами крана 14.
4 Перечень фигур чертежей и иных материалов.
На представленном чертеже приведена структурная схема системы координатной защиты башенного крана, где (1) - датчик положения крана на подкрановом пути, (2) - датчик азимутального положения стрелы, (3) - датчик вылета, (4) - датчик высоты подъема груза, (6) - устройство ввода уровня допустимой высоты положения груза (h1, h2, h3), (5) - аналоговый мультиплексор, (7) - аналого-цифровой преобразователь, (9) - регистр положения крана на подкрановом пути, (10) - регистр углового положения стрелы крана, (11) - ППЗУ блока параметров строительной площадки, (12) - схема сравнения, (6) - аналоговый коммутатор задания уровня высоты, (8) - аналоговый компаратор, (13) - выходной регистр, (14) - блок управления приводами крана.
5 Сведения, подтверждающие возможность осуществления изобретения.
Устройство в соответствии с приведенным описанием может быть реализовано с использованием цифровых микросхем как малой и средней степени интеграции, так и большой, в частности микроконтроллеров. В качестве ППЗУ можно использовать микросхемы флэш-памяти или оперативной памяти, сохраняющие информацию при выключении питания и обладающие необходимым для решения задачи объемом.
В качестве датчиков положения крана и его рабочих органов могут быть использованы резистивные (или другого типа) датчики, широко используемые в настоящее время, например, в ограничителях грузоподъемности подъемных кранов.
Специальное программное обеспечение может быть разработано с помощью одной из широко распространенных систем программирования.
Система автоматической координатной защиты была реализована и испытана в рабочих условиях на башенных кранах типа КБМ-401П и КБ-473. Блок управления был выполнен на микросхемах серий К561, КР1554, а в качестве микросхем ППЗУ были использованы микросхемы флэш-памяти типа AD29С010А (128К×8). Испытания показали полную работоспособность системы в соответствии с предъявленными требованиями. Ввод информации в ПЭВМ выполнялся в соответствии с описанием на специализированное ПО, причем эта работа может быть выполнена специалистом со средним техническим образованием, знакомым с работой на ПЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 1992 |
|
RU2045468C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2008 |
|
RU2381172C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2344370C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
Группа изобретений относится к технике обеспечения безопасности работы башенных кранов. В соответствии с планом производства работ задают зоны с разными типами ограничений движения крана, связанные с конкретными объектами. Эти зоны вводятся в ПЭВМ, не входящую в приборный комплекс системы координатной защиты, в условиях лаборатории. В ПВЭМ с помощью специального программного обеспечения формируется массив данных, каждый элемент которого сопоставлен элементу строительной площадки и содержит информацию о запрещенных движениях крана в соответствующей точке. Полученный массив записывается в перепрограммируемое постоянное запоминающее устройство (ППЗУ) системы координатной защиты, которая по сигналам от датчиков, определяющих положение крана и его элементов, и по сигналам из ППЗУ формирует сигналы блокировки приводов при попадании крана и его рабочих органов в запрещенную зону. Группа изобретений обеспечивает с помощью простых средств координатную защиту крана с повышенной эффективностью. 2 н.п. ф-лы, 1 ил.
мультиплексор для поочередного считывания сигналов датчиков, аналого-цифровой преобразователь для преобразования аналоговых сигналов датчиков в цифровой двоичный код, регистры положения крана на подкрановом пути и углового положения стрелы крана для однозначного определения положения крана и его стрелы на строительной площадке, ППЗУ блока параметров строительной площадки для хранения сигналов управления приводами крана, выходной регистр, схему сравнения текущего значения вылета груза с допустимой величиной, считываемой из ППЗУ, аналоговый коммутатор задания уровней высоты, аналоговый компаратор для формирования сигнала превышения грузом допустимой высоты и блок управления приводами крана, обеспечивающий определение положения крана и его стрелы на подкрановой площадке, высоту нахождения груза и считывание по этим параметрам информации из ППЗУ о разрешенных движениях, используемой для блокирования приводов крана и обеспечения его безопасной работы.
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| УСТРОЙСТВО ЗАЩИТЫ СТРОИТЕЛЬНОГО КРАНА | 1993 |
|
RU2070162C1 |
| Указатель положения препятствий для стрелового крана | 1978 |
|
SU1104095A1 |
| Устройство для программного управления механизмами поворота и изменения вылета стрелы грузоподъемного крана | 1967 |
|
SU464099A3 |

