Изобретение относится к вычислительной технике, в частности к устройствам ввода, и может быть использована в компьютерных играх, для управления объектами в моделируемых на ЭВМ пространствах, в области машиностроения, самолетостроения, космотавтики.
Известно описание изобретения к патенту РФ №2121708, Приставка-джойстик для трекбола, МПК G06F 3/033 от 1997.04.03, опубл. 1998.11.10. авт. Ефремов М.В. Приставка-джойстик для трекбола, состоящего из рукоятки, кронштейна, шарнира и сферического сегмента, причем рукоять шарнирно закреплена в кронштейне, установленном на корпусе трекбола, а сферический сегмент закреплен на нижнем конце рукояти так, что его сферическая поверхность соприкасается с шаром трекбола с возможностью передачи движения рукояти на шар трекбола.
Недостатки: невозможность управлять сложной системой движений без привлечения клавиатуры и/или дополнительных средств управления, низкая точность движений, низкий показатель надежности в системе «Человек-Машина», невозможность контроля центральной части системы движений в реальном объеме (аналог).
Наиболее близким техническим решением из известных является описание к патенту на полезную модель №45843, от 15.02.2005, Манипулятор для компьютера, МПК G06F 3/033, 2005.05.27, авт. Груздев А.В., Пыльная Л.С., характеризующийся следующими признаками: манипулятор для компьютера, содержащий кнопки, корпус, внутри которого установлен шарнир, отличающийся тем, что на шарнире жестко закреплен хвостовик для крепления его на любом удобном месте для оператора, причем корпус жестко соединен с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями для расположения предплечий оператора с возможностью движения за счет шарнира, при этом на передних частях управляющего элемента по периферии друг против друга с боковых сторон расположены кнопки и ролики для удобного управления системой движений.
Недостатки: управляющий элемент не имеет возможность регулировки Н-образной рамы по ширине плеч оператора, отсутствие возможности регулирования жесткости хода шарнира в зависимости от веса оператора, ситуации, происходящей в системе движений.
Технический результат: повышение удобства в использовании, качества, надежности, точности работы манипулятора.
Повышение удобства в использовании за счет регулировки Н-образной рамы при помощи зажимов, расположенных на управляющем элементе по ширине между криволинейными опорными поверхностями в зависимости от ширины плеч оператора, и увеличение качества, надежности, точности контролируемых функций в системе движений достигается за счет того, что известный манипулятор, содержащий корпус, внутри которого расположен шарнир, на котором жестко закреплен хвостовик для крепления его на любом удобном месте для оператора, причем корпус жестко соединен с управляющим элементом, выполненным в виде Н-образной рамы, имеет внутри корпуса регулятор, взаимодействующий с расположенным внутри корпуса шарниром, что позволяет регулировать жесткость его хода перед началом работы в зависимости от веса и комплекции оператора и автоматически во время работы в зависимости от ситуации, происходящей в системе движений. За счет возможности регулировки управляющего элемента по ширине между криволинейными опорными поверхностями с помощью зажимов, установленных на Н-образной раме, повышается удобство в использовании, т.к. на одном и том же манипуляторе могут работать операторы различного телосложения, предварительно установив нужную ширину управляющего элемента, в зависимости от своей ширины плеч, повышается качество работы оператора, т.к. имеющийся внутри корпуса манипулятора регулятор взаимодействует с шарниром и контролирует жесткость его хода в автоматическом режиме в зависимости от ситуации в системе движений, что вызывает у оператора эффект «обратной связи» и более четкое восприятие системы движений. Автоматически меняющаяся жесткость хода шарнира позволяет оператору лучше почувствовать объект, которым он управляет. Надежность и точность работы манипулятора повышается за счет того, что имеющийся внутри корпуса манипулятора регулятор, взаимодействующий с шарниром, может настраивать жесткость его хода перед началом работы в зависимости от веса и комплекции оператора, что позволяет операторам с различным весом тела и предплечий с одинаковой точностью и эффективностью управлять системой движений.
На чертеже изображен манипулятор для компьютера.
Статика.
Манипулятор для компьютера содержит кнопки 1, корпус 2, внутри корпуса 2 установлен шарнир 3, на котором жестко закреплен хвостовик 4 для крепления последнего на любом удобном месте для оператора, причем корпус 2 жестко соединен с управляющим элементом 5, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями 6 для расположения предплечий оператора с возможностью движения за счет шарнира 3, жесткость хода которого может регулироваться с помощью расположенного в корпусе 2 регулятора 12 по желанию оператора или автоматически в зависимости от ситуации, происходящей в системе движений, при этом на передних частях 7 управляющего элемента 5 по периферии друг против друга с боковых сторон расположены кнопки 1, кнопки шарнирные 8, кнопки многоконтактные 9, ролики 10 для удобного управления системой движений, причем управляющий элемент 5 имеет возможность регулировки Н-образной рамы за счет расположенных на ней зажимов 11 по ширине между криволинейными опорными поверхностями 6.
Работа устройства.
Манипулятор для компьютера работает следующим образом. Манипулятор посредством хвостовика 4, жестко соединенного с шарниром 3, крепится на любом удобном месте для оператора, например к столу (не показано). Оператор находится перед манипулятором на расстоянии = 5-7 см от корпуса 2 манипулятора, чтобы тело оператора не касалось корпуса 2. Предплечья рук ложатся на управляющий элемент 5, выполненный в виде Н-образной рамы с криволинейными опорными поверхностями 6 для расположения предплечий оператора с возможностью движения за счет шарнира 3, жестко закрепленного на столе посредством хвостовика 4. Оператор устанавливает удобную для себя ширину управляющего элемента 5 при помощи зажимов 11. Управляющий элемент 5 жестко соединен с корпусом 2, в котором расположен шарнир 3, за счет которого управляющий элемент 5 получает возможность движения, причем в корпусе 2 установлен регулятор 12, контролирующий жесткость хода шарнира 3, и оператор перед началом работы устанавливает нужный уровень жесткости хода шарнира 3 при помощи регулятора 12. Система движений частично контролируется предплечьями оператора, лежащими на криволинейных опорных поверхностях 6, и частично контролируется кистями оператора, лежащими на передних частях 7 управляющего элемента 5. Т.к. регулятор 12, расположенный в корпусе 2, во время работы манипулятора автоматически контролирует жесткость хода шарнира 3 в корпусе 2 в зависимости от ситуации в системе движений, у оператора возникает эффект «обратной связи» и более четкое восприятие системы движений. Кисти оператора взаимодействуют с кнопками 1, кнопками шарнирными 8, кнопками многоконтактными 9 и роликами 10, расположенными на передних частях 7 управляющего элемента 5 и по периферии друг против друга с боковых сторон передней части 7 для удобного управления системой движений.
Конструкция манипулятора позволяет эффективно осуществлять процесс управления независимо от веса и комплекции оператора.
Манипулятор для компьютера по сравнению с прототипом позволяет физиологически более четко воспринимать систему движений за счет появления эффекта «обратной связи», позволяющего оператору лучше почувствовать объект, которым он управляет.
Технико-экономические показатели.
Удобство в использовании устройства, качество, надежность, точность работы манипулятора по сравнению с прототипом увеличивается многократно.
Перечень позиций.
1 - кнопки,
2 - корпус манипулятора,
3 - шарнир,
4 - хвостовик, жестко закрепленный на шарнире,
5 - управляющий элемент в виде H-образной рамы,
6 - криволинейные опорные поверхности для расположения предплечий оператора,
7 - передняя часть управляющего элемента,
8 - кнопки шарнирные,
9 - многоконтактные кнопки,
10 - ролики,
11 - зажим,
12 - регулятор.
Манипулятор для компьютера относится к устройствам ввода данных и может быть использован в компьютерных играх, для управления объектами в моделируемых на ЭВМ пространствах, в области машиностроения, самолетостроения, космонавтики и др. Технический результат заключается в повышении надежности и точности работы манипулятора, а также удобства его использования. Для этого манипулятор содержит корпус, жестко соединенный с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями для расположения предплечий оператора с возможностью движения за счет шарнира, установленного внутри корпуса. На шарнире жестко закреплен хвостовик для крепления на любом удобном месте для оператора. На передних частях управляющего элемента по периферии друг против друга с боковых сторон расположены кнопки и ролики для удобного управления системой движений. При этом жесткость хода шарнира может регулироваться с помощью расположенного в корпусе регулятора по желанию оператора или автоматически в зависимости от ситуации, происходящей в системе движений. А управляющий элемент имеет возможность регулировки Н-образной рамы за счет расположенных на ней зажимов по ширине между криволинейными опорными поверхностями. 1 ил.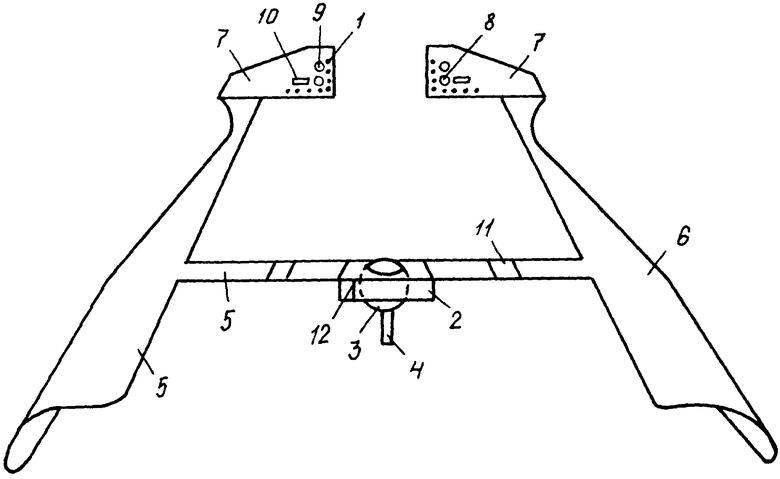
Манипулятор для компьютера, содержащий кнопки, корпус, жестко соединенный с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями, на передних частях которого по периферии друг против друга с боковых сторон расположены кнопки и ролики для удобного управления системой движений, внутри установлен шарнир, на котором жестко закреплен хвостовик, отличающийся тем, что на управляющем элементе, выполненном в виде Н-образной рамы, между криволинейными опорными поверхностями установлены зажимы, а внутри корпуса расположен регулятор, контролирующий жесткость хода шарнира.
| Приспособление для упаковки токов спрессованного сена, соломы, хлопка и т.п. | 1934 |
|
SU45843A1 |
| КЛАВИАТУРА | 2002 |
|
RU2268481C2 |
| US 5892499 A, 06.04.1999 | |||
| JP 2005293532 A, 20.10.2005 | |||
| US 6369799 В1, 09.04.2002. | |||

