Область техники, к которой относится изобретение.
Изобретение относится к робототехнике, механическим манипуляторам. Оно может быть использовано как:
1. Средство передвижения по твердой поверхности.
2. Трансформируемое жилье.
3. Временные инженерные сооружения-хранилища, ангары, мосты, заграждения, строительные леса, опалубки.
4. Установка для сценических, зрелищных эффектов.
5. Подъемно-монтажный механизм для нестандартных грузов.
6. Игрушка, аттракцион.
7. Учебное пособие.
8. Рабочий материал художника, архитектора, дизайнера.
9. Средство фиксации в пространстве неустойчивых объектов.
10. Кинетический интерфейс компьютера.
11. Летательные аппараты (в том числе и легче воздуха) изменяемого объема и геометрии.
12. Трансформируемые радиолокаторы, антенны теле-, радиосигналов.
13. Трансформируемая мебель.
14. Военные установки широкого применения: противопехотные, разминирующие и т.д.
15. Сельскохозяйственные установки широкого применения, для вспашки, полива, сбора урожая и т.д.
16. Разнообразные космические конструкции.
17. Установка для расчистки завалов в лесу, в горах, спасения людей после землетрясений.
18. Установка для подъема затонувших кораблей, проведения подводных высокосложных работ.
19. Корабли с изменяемым водоизмещением и гидродинамическими характеристиками.
20. Универсальная пожарная установка, например, для тушения лесных пожаров, спасения людей и тушения пожаров в высотных домах.
21. Установка для спасения людей при кораблекрушении.
22. Установка для выборочной вырубки деревьев в лесу, осторожная в отношении других деревьев.
23 Декоративные поверхности, "активные" обои.
Уровень техники
Известен универсальный трансформирующийся модульный робот, содержащий унифицированные модули, оснащенные разъемными сцепными устройствами, двигательными устройствами и электронной схемой управления упомянутыми двигательными устройствами (1).
Данный робот является прототипом предлагаемого изобретения.
К недостаткам этой конструкции можно отнести низкие возможности трансформации вследствие ограничения количества степеней свободы сцепного устройства вращением вокруг продольной оси, а также невозможность замены собственных неисправных модулей в процессе работы, так как соединения и разъединения сцепных устройств модулей производятся человеком.
Сущность изобретения
Задачей настоящего изобретения является расширение сферы деятельности роботов, повышение их надежности и универсальности.
Данный технический результат достигается: увеличением количества модулей до некоторой "избыточной" величины;
размещением двигательных устройств как внутри модуля (1), так и в отдельных блоках, соединяющих модули;
особенностями конструкции предлагаемого сцепного устройства, которые позволяют производить соединения и разъединения модулей непосредственно в процессе работы без участия человека;
наличием в модулях электронной схемы управления (1) сцепными и двигательными устройствами и наличием специального компьютера для управления роботом в целом.
Понятие "избыточность" означает, что количество модулей, составляющих робот заведомо больше, чем тот минимум, который необходим для выполнения конкретной задачи. Это дает резерв на случай выхода из строя какого-нибудь модуля, а в совокупности с управляемыми сцепными устройствами позволяет производить замену этих модулей или перестраивать свою структуру при изменении условий задачи. Количество модулей ограничивается мощностью источника электроэнергии и быстродействием управляющего компьютера.
В разных вариантах робота в качестве модулей могут использоваться:
1. Телескопические трубки с механизмом изменения длины и сцепными устройствами на концах, каждое из которых имеет три степени свободы.
2. Плоские или объемные элементы со сцепными устройствами, имеющими от одной до трех степеней свободы.
3. Профилированные стержни постоянной длины, соединяющиеся между собой с помощью специальных блоков с двигательными устройствами, которые могут перемещаться по стержням или перемещать стержни (один блок - несколько стержней) в трех взаимно перпендикулярных направлениях.
4. Плоские элементы, соединяющиеся между собой в единую плоскость с помощью гибких управляемых шарниров.
Возможны комбинации вышеперечисленных вариантов.
Для решения каких-то конкретных задач может использоваться различное навесное оборудование: манипуляторы - захваты, контрольные видеокамеры, надувные эластичные мешки (водно-спасательная система), гибкие шланги и емкости (противопожарная система) и др.
Конструкция модуля предусматривает размещение в нем электронной схемы управления механизмами самого модуля, а также навесным оборудованием. Управляющие команды формируются компьютером, подключенным к одному из сцепных узлов робота. Команды имеют адреса, соответствующие адресам модулей, которым надо работать в данный момент. Каждый модуль имеет набор датчиков, посылающих информацию на центральный компьютер о работоспособности модуля, его размерах и ориентации сцепных узлов. Также могут быть дополнительные датчики: нагрева, влажности, механической нагрузки и т.д. На основе этой информации в компьютере формируется объемная модель робота, изменяющаяся в процессе его реальной трансформации.
Перечень фигур графических изображений.
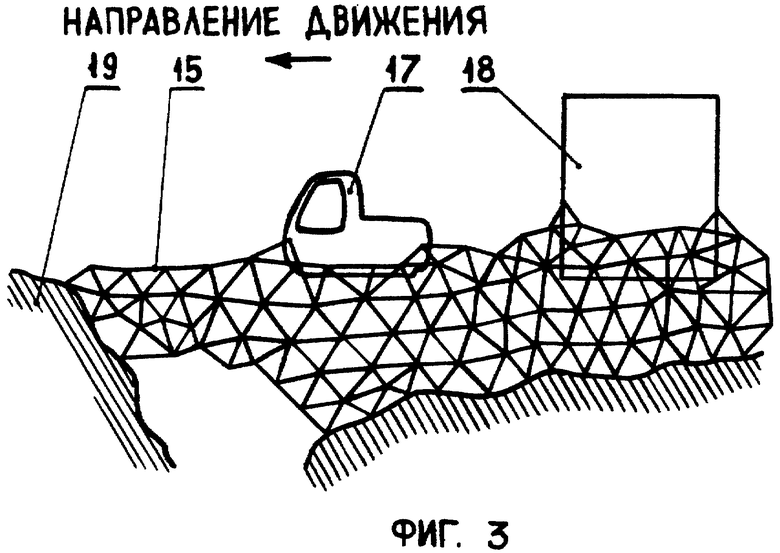
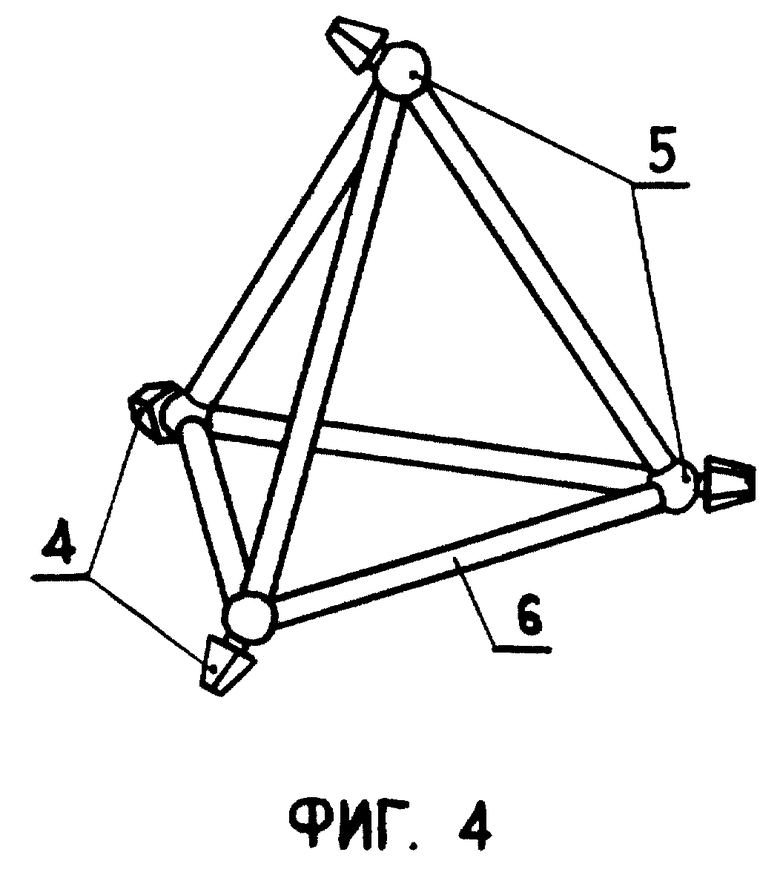
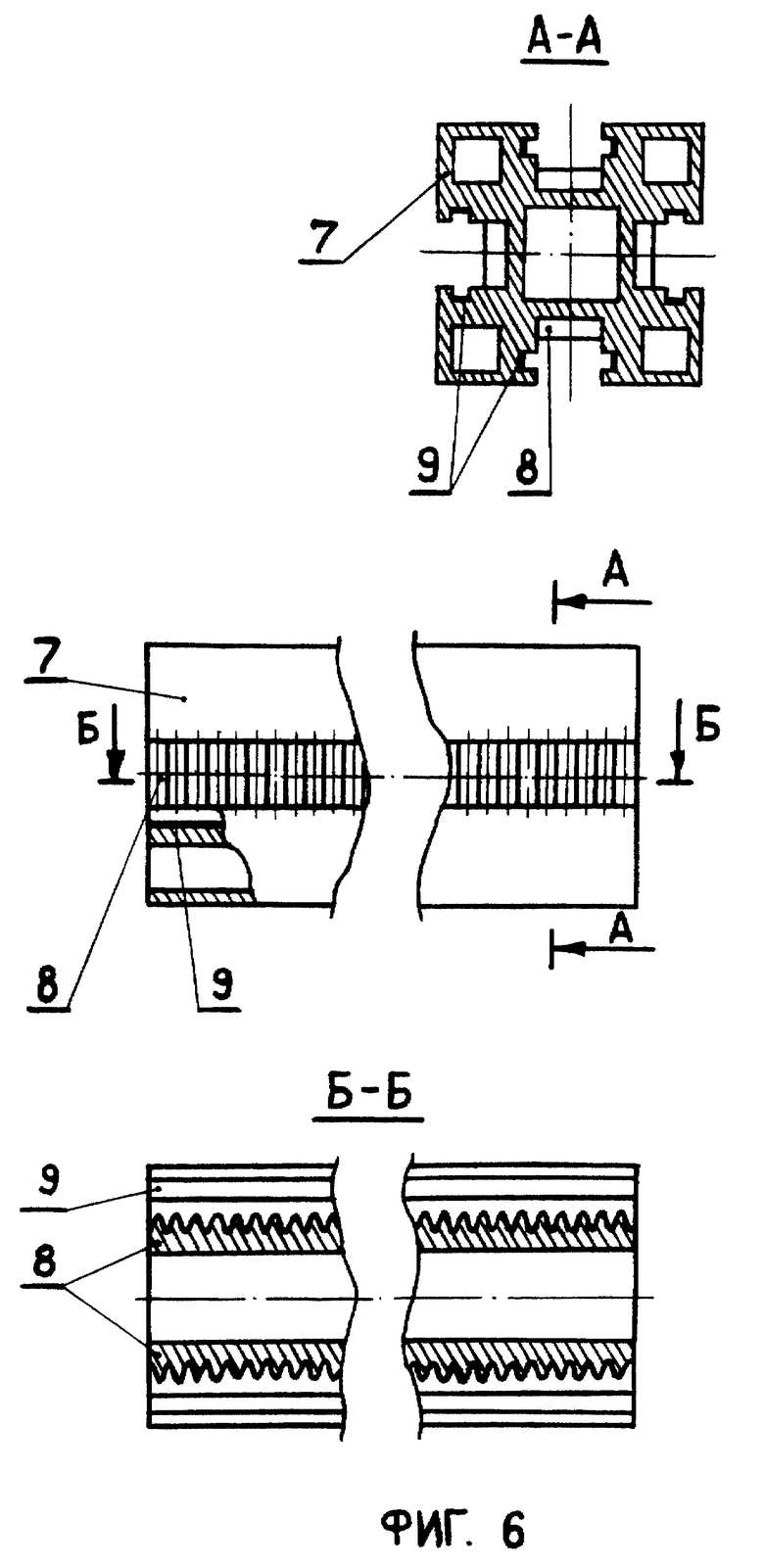
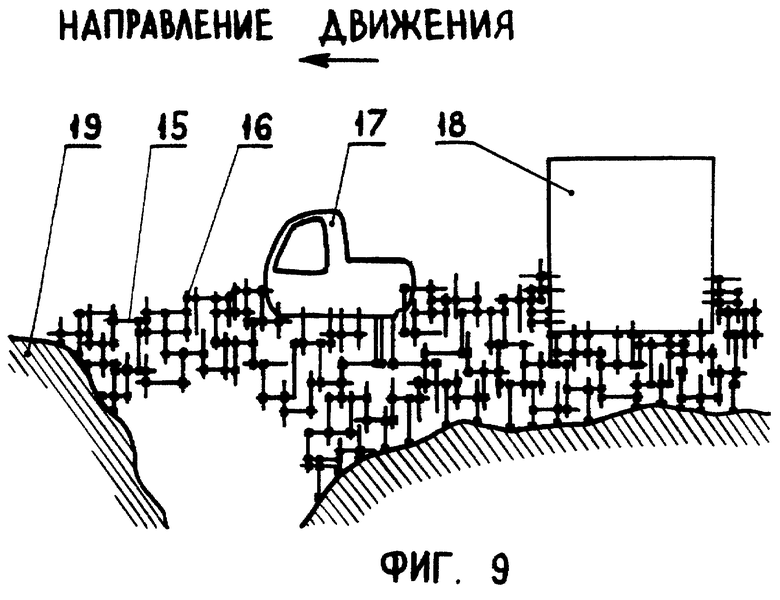
На фиг. 1 изображен общий вид первого варианта модуля, на фиг. 2 - его разрез, на фиг. 3 - схематичное изображение мобильного робота, построенного из этих модулей. Фиг. 4 - одна из разновидностей второго варианта модуля. За основу взят тетраэдр. На фиг. 5 - схематичное изображение робота, построенного из модулей второго варианта. На фиг. 6 изображены проекция и два сечения третьего варианта модуля - профилированного стержня. На фиг. 7 - общий вид блока с двигательными устройствами для профилированных стержней. На фиг. 8 изображен разрез блока по оси туннеля для модуля. На фиг. 9 - схематичное изображение мобильного робота, построенного из модулей третьего варианта и блоков с двигательными устройствами. На фиг. 10 изображен фрагмент робота из модулей четвертого варианта и сечение, поясняющее одну из ее возможных трансформаций. На фиг. 11 изображен один из способов замены неисправного модуля в четвертом варианте робота.
Сведения, подтверждающие возможность осуществления изобретения
Первый вариант робота состоит из модулей, устроенных следующим образом. Внутри телескопически соединенных трубок 1, составляющих корпус модуля, установлен электродвигатель с механизмом изменения длины модуля 2 и электронная схема управления 3. На концах модуля имеются сцепные устройства 4 с электрическими разъемами, соединяемые с модулем системой из трех серводвигателей с редукторами 5. Эта система служит для изменения положения каждого сцепного устройства относительно модуля. Сцепное устройство может быть выполнено, например, в виде усеченной пятиугольной пирамиды так, что двенадцать устройств, соединенных боковыми гранями, образуют додекаэдр.
В нерабочем положении робот занимает минимальный объем. Модули сокращены до предела и уложены параллельно, образуя единый пакет так, что все они соединены между собой хотя бы одним сцепным устройством, поэтому робот всегда готов к работе. После подключения к одному из свободных сцепных устройств компьютера с соответствующей программой и подачи питающего напряжения происходит опрос компьютером всех модулей о их работоспособности, длине и ориентации сцепных узлов. Такой опрос происходит несколько раз в секунду. В результате чего в оперативной памяти компьютера создается объемная модель робота, с которой в дальнейшем работает оператор.
В рабочем положении по команде компьютера некоторые модули начинают изменять длину, сцепные устройства разъединяются и соединяются в других комбинациях, образуется пространственная решетчатая ферма. Происходит перераспределение модулей внутри робота согласно программе до тех пор, пока он не примет заданную форму и структуру.
Второй вариант робота предназначен в основном для декоративных целей. Модуль второго варианта состоит из корпуса 6, сцепных устройств 4 и серводвигателей с редукторами 5, изменяющими ориентацию сцепного устройства. Эти серводвигатели должны быть достаточно мощными, чтобы перемещать в пространстве модуль при зафиксированном сцепном устройстве. Внутри модуля располагается схема управления (не показана).
Третий вариант робота состоит из двух видов равнозначных модулей: профилированных стержней и блоков с двигательными устройствами. Профилированный стержень 7 имеет квадратное сечение с пазами сложной формы по всей длине каждой стороны, в которых смонтированы зубчатые рейки 8 для перемещения модуля и токоведущие дорожки 9 для передачи питающего напряжения и сигналов управления.
Блок с двигательными устройствами состоит из корпуса 10, механизма перемещения стержней по туннелям 12 и схемы управления 3. Трансформация этого варианта робота происходит аналогично первому варианту с той разницей, что перемещение модулей относительно сцепных устройств (которыми в данном случае являются блоки с двигательными устройствами) происходит не в угловых, а в линейных взаимно перпендикулярных направлениях. В данном варианте робота могут понадобиться несколько устройств, служащих для поворота стержней из одной координатной оси в другую, перпендикулярную первой, если этого требует задача, выполняемая роботом. Таким устройством может быть упрощенный (с меньшим количеством туннелей) блок с двигательными устройствами, у которого туннели могут поворачиваться один относительно другого на 90o.
Четвертый вариант робота состоит из плоских модулей 13, на которых крепятся электронные схемы управления 3, соединенных между собой управляемыми шарнирно-гибкими соединениями 14 (например биметаллическими пластинами).
Понятие "гибкость" означает, что данное соединение модулей имеет кроме одной управляемой степени свободы еще две неуправляемые, которые могут реализовываться под воздействием соседних модулей или внешних сил, например силы тяжести.
Замена собственных модулей может производиться как показано на фиг. 11 с помощью специальных навесных устройств 21, устанавливаемых на нескольких модулях робота, демонтируемый модуль - 20.
Управление каждым соединением индивидуально позволяет получить большое количество вариантов рельефа плоскости.
Очевидно, что размеры модулей любого из вышеперечисленных роботов могут варьироваться в зависимости от условий применения от нескольких сантиметров ("активные" обои, мебель) до нескольких метров в силовых конструкциях (разборка завалов и т.д.).
На фиг. 3 и 9 изображены мобильные роботы, составленные из модулей соответственно первого и третьего вариантов. Цифрами обозначены: собственно робот 15, блоки с двигательными устройствами для третьего варианта 16, кабина, в которой находится оператор, а также управляющий компьютер и электрический генератор 17, перемещаемый груз 18, поверхность грунта 19.
В связи с возможностями роботов трансформироваться в широчайших пределах - (особенно первый вариант), способностью контролировать каждую точку пространства в пределах досягаемости они будут особенно полезны там, где необходима универсальность и высокая надежность. Например, в космосе при освоении других планет или на Земле в экстремальных условиях, при пожарах, землетрясениях, кораблекрушениях и т.д.
Литература
1. Патент EP 0547421 A1, В 25 J 9/08, от 23.06.1993.






Изобретение относится к робототехнике. Трансформирующийся модульный робот состоит из унифицированных модулей с разъемными сцепными устройствами. Сцепные устройства имеют возможность соединения и разъединения для обеспечения перестройки структуры робота непосредственно в процессе работы. Робот оснащен электронной схемой управления с компьютером. Внутри модулей или в предусмотренных для их соединения отдельных блоках смонтированы двигательные устройства. Модули могут быть выполнены в виде телескопических трубок с механизмами изменения их длины, плоских или объемных элементов, профилированных стержней постоянной длины. В результате обеспечивается расширение сферы деятельности роботов, повышение их надежности и универсальности. 4 з.п. ф-лы, 11 ил.
| Бетонная смесь | 1975 |
|
SU547421A1 |
| Промышленный робот модульного типа | 1989 |
|
SU1734994A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| US 4780047, 25.10.1988 | |||
| ДВЕРНОЙ ЗАМОК С ЗАСОВОМ С КРЮКОМ | 1998 |
|
RU2182634C2 |
| US 5603243, 18.02.1997 | |||
| Механика промышленных роботов / Под ред | |||
| ФРОЛОВА К.В., ВОРОБЬЕВА Е.И | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ВОРОБЬЕВ Е.И | |||
| и др | |||
| Основы конструирования | |||
| - М.: Высшая школа, 1989, с.4, 29, 48 - 49, 96. | |||

