Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству помощи движению носимого типа, а более конкретно к устройству помощи движению носимого типа для помощи или замещения движения владельца, устройству калибровки устройства помощи движению носимого типа, способу калибровки для устройства помощи движению носимого типа и модификации программы калибровки.
Предшествующий уровень техники
Движения, которые могут быть легко выполнены здоровым человеком, часто очень трудно выполнить физически искалеченному человеку, потерявшему свою мышечную силу, или пожилому человеку, имеющему ухудшенную мышечную силу. Следовательно, развитие разных устройств помощи силе продвигается в наши дни с тем, чтобы помочь или заместить движения таких людей.
Одним из таких устройств помощи силе является, например, устройство помощи движению носимого типа (далее в данном документе просто именуется как "устройство помощи движению"), которое носится пользователем (далее в данном документе именуемом как "владелец" или "носитель устройства").
Такие типы устройств помощи движению включают в себя один тип, который разрабатывается с конфигурацией, включающей в себя датчик миоэлектрического потенциала (обнаруживающую часть) для обнаружения сигнала миоэлектрического потенциала (биосигнала), ассоциативно связанного с мышечной работой владельца, и силовой привод для приложения помогающей силы к владельцу (например, непатентный документ 1).
Это устройство помощи движению имеет характеристику управления приводом (например, мотором) на основе результатов обнаружения из обнаруживающей части и управления приводом посредством компьютера для применения помогающей силы (помогающей энергии) в соответствии с желанием владельца. Соответственно, устройство помощи движению может приложить помогающую силу к владельцу на основе желания владельца и предоставить помогающую силу, требуемую для движения владельца, совместно с движением владельца.
Между тем, вышеописанное устройство помощи движению генерирует помогающую силу для удовлетворения необходимого соотношения относительно сигналов миоэлектрического потенциала, излучаемых владельцем, например, посредством подачи управляющих сигналов, имеющих предварительно определенное соотношение относительно усиленных сигналов обнаружения, из датчика миоэлектрического потенциала к схеме привода, которая управляет приводом.
То есть, так как миоэлектрические сигналы и движение, соответствующее мышечной работе владельца, имеют положительное соотношение, и их пропорция становится некоторым значением, необходимо применить помогающую силу, соответствующую миоэлектрическим сигналам, так, чтобы удовлетворить такие взаимоотношения. Другими словами, пока помогающая сила устройства помощи движению не удовлетворяет определенному взаимоотношению относительно сигналов миоэлектрического потенциала, помогающая энергия, приложенная к владельцу, может стать слишком большой или слишком малой и может вредно воздействовать на пользователя.
Сигналы миоэлектрического потенциала, излучаемые владельцем, являются слабыми электрическими сигналами. Кроме того, пропорциональное взаимоотношение между сигналами миоэлектрического потенциала и мышечной силой, соответствующей сигналам миоэлектрического потенциала, отличается в зависимости от каждого человека. Кроме того, значение электрического сопротивления кожи непостоянно даже для одного и того же человека в зависимости от его/ее повседневного состояния. Соответственно, есть много случаев, когда сигналы миоэлектрического потенциала и мышечная сила, сгенерированная согласно сигналам миоэлектрического потенциала, непостоянны. Следовательно, устройство помощи движению устанавливается с так называемым устройством калибровки для коррекции управляемой переменной относительно привода посредством умножения переменной на предварительно определенный коэффициент (параметр), чтобы получить управляющий сигнал. Более конкретно, устройство калибровки предусмотрено для ассоциативной привязки сигналов миоэлектрического потенциала и помогающей силы с определенным взаимоотношением и выполнения коррекции посредством использования коэффициента (параметра) в случае, когда устройство помощи движению носится владельцем. Это устройство калибровки сконфигурировано так, чтобы корректировать управляемую переменную посредством получения сигналов миоэлектрического потенциала, сгенерированных, когда определенное количество нагрузки применяется к владельцу, и получить и изменить вышеупомянутый коэффициент (параметр) в соответствии с соответствующим взаимоотношением между нагрузкой и сигналами миоэлектрического потенциала.
В случае, когда устройство калибровки изменяет нагрузку, приложенную к владельцу пошаговым образом, и обеспечивает мышечную силу владельцу для уравновешивания нагрузки на каждом этапе, устройство калибровки может ассоциативно связывать миоэлектрические сигналы и помогающую энергию, чтобы установить определенное взаимоотношение на основе соответствующих взаимоотношений между нагрузкой и сигналами миоэлектрического потенциала каждого этапа.
В качестве способа изменения нагрузки, пошаговым образом применяемой к владельцу, существует способ подготовки баланса различных грузов и замены баланса всякий раз, когда обнаруживается внешний миоэлектрический сигнал, или способ соединения цилиндрической пружины с ногой владельца и изменения количества растяжений цилиндрической пружины пошаговым образом.
С помощью устройства помощи движению, включающего в себя устройство калибровки, использующее эти способы, сигналы миоэлектрического потенциала и помогающая энергия могут быть надежно ассоциативно связаны определенным взаимоотношением в соответствии с необходимой потребностью. Соответственно, помогающая сила, прилагаемая к владельцу, может быть предотвращена от того, чтобы стать слишком большой или слишком малой.
Непатентный документ 1: Takao Nakai, Suwoong Lee, Hiroaki Kawamoto and Yoshiyuki Sankai, "Development of Power Assistive Leg for Walking Aid using EMG and Linux," Second Asian Symposium on Industrial Automation and Robotics, BITECH, Bangkok, Thailand, May 17-18, 2001.
Сущность изобретения
ПРОБЛЕМЫ, КОТОРЫЕ ДОЛЖНЫ БЫТЬ РЕШЕНЫ ИЗОБРЕТЕНИЕМ
Между тем, как описано выше, вышеописанное устройство помощи движению сконфигурировано так, чтобы иметь датчик миоэлектрического потенциала, непосредственно присоединенный к коже владельца, и обнаруживать поверхностный миоэлектрический потенциал через кожу. Так как значение электрического сопротивления может отличаться или изменяться даже у одного и того же человека из-за, например, отклонения в позиции прикрепления датчика миоэлектрического потенциала или изменения физического состояния, необходимо выполнять вышеописанную коррекцию (калибровку) каждый раз, когда устройство помощи движению надевается. Следовательно, владелец вынужден выполнять сложные процедуры каждый раз, когда устройство помощи движению надевается владельцем, например, в случае вышеупомянутых способов калибровки, замены балансов различных грузов или прикрепления цилиндрической пружины и пошагового изменения количества расширений цилиндрической пружины.
С помощью традиционных способов калибровки процедуры, требуемые для отдельного владельца, чтобы выполнить калибровку, становятся сложными. Это не только требует значительного количества времени для завершения калибровки, но также размещает излишний груз на владельце с ослабленными мышцами. Эти причины служат в качестве препятствия к тому, чтобы определить устройство помощи движению в практическое использование и популяризировать устройство помощи движению.
Следовательно, принимая вышеописанную ситуацию во внимание, настоящее изобретение нацелено на решение вышеописанных проблем посредством коррекции параметров, которые будут уменьшать нагрузку владельца при выполнении калибровки.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ
Для того чтобы решить вышеописанные проблемы, настоящее изобретение включает в себя следующее.
В пункте 1 настоящего изобретения предусмотрено устройство помощи движению носимого типа, включающее в себя обнаруживающую часть для обнаружения биосигнала от носителя устройства, носимое устройство помощи движению, включающее в себя приводной источник для приложения движущей силы к владельцу и управляющую часть для управления приводным источником так, чтобы генерировать помогающую силу согласно сигналу обнаружения, обнаруженному обнаруживающей частью, устройство помощи движению носимого типа характеризуется тем, что содержит: часть калибровки для обнаружения биосигнала, соответствующего движущей силе, примененной в качестве нагрузки от приводного источника, и установки значения коррекции на основании обнаруженного сигнала.
В пункте 2 настоящего изобретения предусмотрено устройство помощи движению носимого типа, включающее в себя обнаруживающую часть для обнаружения биосигнала от владельца, носимое устройство помощи движению, включающее в себя приводной источник для приложения движущей силы к владельцу и управляющую часть для управления приводным источником для того, чтобы генерировать помогающую силу согласно сигналу обнаружения, обнаруженному обнаруживающей частью, устройство помощи движению носимого типа характеризуется тем, что содержит: часть генерации нагрузки для приложения предварительно определенной движущей силы из приводного источника в качестве внешней силы, когда носимое устройство помощи движению носится владельцем; и часть установки значения коррекции для генерации параметра для процесса вычисления, выполняемого в соответствии с сигналом обнаружения управляющей частью, и установки упомянутого параметра как значения коррекции для владельца.
В пункте 3 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризуемое тем, что часть калибровки включает в себя базу данных, хранящую соответствующее взаимоотношение между сигналом обнаружения, обнаруженным обнаруживающей частью, и сигналом управления для управления приводным источником, где управляющая часть корректирует сигнал управления, сохраненный в базе данных, согласно значению коррекции, установленному частью установки значения коррекции.
В пункте 4 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризующееся тем, что обнаруживающая часть прикрепляется к коже владельца и обнаруживает миоэлектрический потенциал владельца как биосигнал.
В пункте 5 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризующееся тем, что носимое устройство помощи движению включает в себя пояс талии, часть помощи правой ноге, предусмотренную на правой стороне ниже пояса талии, и часть помощи левой ноге, предусмотренную с левой стороны ниже пояса талии, где часть помощи правой ноге и часть помощи левой ноге включают в себя первый каркас, протягивающийся вниз, до некоторой степени поддерживающий пояс талии, второй каркас, протягивающийся вниз от первого каркаса, третий каркас, протягивающийся вниз от второго каркаса, четвертый каркас, на котором размещается нижняя часть ступни владельца и который предусмотрен на нижнем краю третьего каркаса, первое соединение, вставленное между нижним краем первого каркаса и верхним краем второго каркаса, и второе соединение, вставленное между нижним краем второго каркаса и верхним краем третьего каркаса.
В пункте 6 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризующееся тем, что первое соединение предусмотрено на уровне, соответствующем высоте тазобедренного сустава владельца, причем второе соединение предусмотрено на уровне, соответствующем высоте коленного сустава владельца.
В пункте 7 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризующееся тем, что первый приводной источник предусмотрен в первом соединении для передачи движущей силы для вращения второго каркаса, причем второй приводной источник предусмотрен во втором соединении для передачи движущей силы для вращения третьего каркаса.
В пункте 8 настоящего изобретения предусмотрено устройство помощи движению носимого типа, характеризующееся тем, что первый и второй приводные источники включают в себя датчик угла для обнаружения угла соединения.
В пункте 9 настоящего изобретения предусмотрено устройство калибровки для устройства помощи движению носимого типа для выполнения калибровки всякий раз, когда владелец носит носимое устройство помощи движению, включающее в себя приводной источник, генерирующий помогающую энергию, соответствующую биосигналам от владельца, посредством ассоциативного связывания биосигналов и помогающей энергии в предварительно определенном взаимоотношении, устройство характеризуется тем, что содержит: первую часть хранения для хранения первого соответствующего взаимоотношения между энергией и биосигналами, сгенерированными владельцем, носящим носимое устройство помощи движению; и вторую часть хранения для хранения второго соответствующего взаимоотношения между энергией и биосигналами, сгенерированными владельцем во время процесса выполнения предварительно определенного базового движения; причем на основе биосигналов, сгенерированных во время базового движения владельца, и второго соответствующего взаимоотношения выполняется коррекция помогающей энергии, соответствующей биосигналам, для удовлетворения первого соответствующего взаимоотношения всякий раз, когда носимое устройство помощи движению носится владельцем.
В пункте 10 настоящего изобретения предусмотрено устройство калибровки устройства помощи движению носимого типа, характеризующееся тем, что первое соответствующее взаимоотношение включает в себя энергию, имеющую положительное соотношение (коррекцию) относительно биосигналов, причем второе соответствующее взаимоотношение включает в себя взаимоотношение между изменениями биосигналов и изменениями энергии базового движения.
В пункте 11 настоящего изобретения предусмотрена программа для калибровки устройства помощи движению носимого типа, дающая возможность компьютеру выполнять калибровку всякий раз, когда владелец носит носимое устройство помощи движению, включающее в себя приводной источник, генерирующий помогающую энергию, соответствующую биосигналам от владельца, посредством ассоциативного связывания биосигналов и помогающей энергии в предварительно определенном взаимоотношении, программа характеризуется тем, что содержит: первую программу для того, чтобы дать возможность компьютеру сохранить первое соответствующее взаимоотношение между энергией и биосигналами, сгенерированными владельцем, носящим носимое устройство помощи движению, и сохранить второе соответствующее взаимоотношение между энергией и биосигналами, сгенерированными владельцем во время процесса выполнения предварительно определенного базового движения; и вторую программу для того, чтобы дать возможность компьютеру выполнить корректировку помогающей энергии, соответствующей биосигналам, на основе биосигналов, сгенерированных во время базового движения владельца и второго соответствующего взаимоотношения, сохраненного во второй части хранения, когда носимое устройство помощи движению носится владельцем, для удовлетворения первого соответствующего взаимоотношения, сохраненного в первой части хранения.
ДЕЙСТВИЕ ИЗОБРЕТЕНИЯ
С помощью настоящего изобретения посредством обнаружения биосигнала, соответствующего движущей силе, приложенной в качестве нагрузки от приводного источника, и установки значения коррекции на основе обнаруженного сигнала требуются нетрудные процедуры для выполнения калибровки, такие как прикрепление грузов в качестве нагрузки к владельцу или прикрепление цилиндрической пружины в качестве альтернативы грузам. Кроме того, калибровка может быть автоматически выполнена посредством использования движущей силы от приводного источника, предусмотренного в носимом устройстве помощи движению. Соответственно, время и усилие, требуемое для калибровки, может быть уменьшено значительно. Это будет далее содействовать предложению устройства помощи движению носимого типа в практическое использование и популяризации устройства помощи движению носимого типа.
Кроме того, излишняя нагрузка при выполнении калибровки не прилагается к владельцу, имеющему ослабленную мышечную силу, а калибровка может быть автоматически выполнена простым выполнением простых движений владельцем, когда владелец носит носимое устройство помощи движению. Это позволяет установить значение коррекции согласно состоянию владельца, а движущую силу точно приложить к владельцу вместе с движением владельца на основе миоэлектрического потенциала владельца.
Следовательно, помогающая сила от приводного источника может быть приложена в соответствии с желанием владельца во время выполнения калибровки. Соответственно, движению владельца может быть постоянно оказана помощь без приложения слишком большой или слишком малой помогающей силы. Таким образом, надежность движения носимого типа может быть далее улучшена.
В отдельности, владелец может выполнить калибровку с легкостью даже в случае, когда манипуляция надетым носимым устройством помощи движению предполагается быть трудной, например в случае, когда владелец начинающий. Следовательно, даже в случае, когда владелец имеет трудность в свободном движении (например, физически ослабленный человек), калибровка может быть выполнена при избежании трудности движения для владельца, и калибровка может быть выполнена в некоторой степени дополняющей физические неполноценности владельца.
Краткое описание чертежей
Фиг.1 - блок-схема системы управления, примененной к устройству помощи движению носимого типа, согласно варианту осуществления настоящего изобретения;
Фиг.2 - перспективное изображение, рассмотренное с передней стороны, показывающее состояние, в котором устройство помощи движению носимого типа надето согласно варианту осуществления настоящего изобретения;
Фиг.3 - перспективное изображение, рассмотренное с задней стороны, показывающее состояние, в котором устройство помощи движению носимого типа надето согласно варианту осуществления настоящего изобретения;
Фиг.4 - вид с левой стороны носимого устройства 18 помощи движению;
Фиг.5 - вид сзади носимого устройства 18 помощи движению;
Фиг.6 - покомпонентная блок-схема устройства 10 помощи движению;
Фиг.7 - схема, показывающая примеры соответствующих задач и фаз;
Фиг.8 - схематический вид базы 148 данных калибровки;
Фиг.9 - схема, показывающая процесс движения в фазах A1-A4 в качестве примера движения;
Фиг.10 - это схемы для показа позиции обнаружения поверхностного миоэлектрического потенциала e1-e4, в которых (A) является схемой, показывающей ногу спереди, а (B) является схемой, показывающей ногу сзади;
Фиг.11 - это схемы для показа позиции обнаружения поверхностного миоэлектрического потенциала e1-e4, в которых (A) является видом сбоку ноги для показа поверхностного миоэлектрического потенциала, когда тазобедренный сустав сгибается в направлении стрелки, а (B) - вид сбоку ноги для показа поверхностного миоэлектрического потенциала, когда коленный сустав сгибается в направлении стрелки;
Фиг.12 - это схематический вид для показа состояния сгибающей мышцы коленного сустава владельца 12, носящего носимое устройство 18 помощи движению;
Фиг.13 - это график, показывающий входной вращающий момент и виртуальный вращающий момент по отношению к разгибающей мышце правого тазобедренного сустава;
Фиг.14 - это график, показывающий входной вращающий момент и виртуальный вращающий момент по отношению к сгибающей мышце правого тазобедренного сустава;
Фиг.15 - график, показывающий разницу между поверхностным миоэлектрическим потенциалом и виртуальным вращающим моментом в случае, когда владелец 12 выполняет одно и то же движение, что и предварительно определенное эталонное движение;
Фиг.16 является графиком, показывающим изменения угла соединения тазобедренного сустава и изменения угла соединения коленного сустава в соответствии со сгибающим и разгибающим движением;
Фиг.17 - график, показывающий виртуальный вращающий момент сгибающего движения тазобедренного сустава, виртуальный вращающий момент разгибающего движения тазобедренного сустава, виртуальный вращающий момент сгибающего движения коленного сустава и виртуальный вращающий момент разгибающего движения коленного сустава в соответствии со сгибающим и разгибающим движением;
Фиг.18 - график, показывающий поверхностный миоэлектрический потенциал сгибающего движения тазобедренного сустава, эталонный виртуальный вращающий момент сгибающего движения тазобедренного сустава и оцененный вращающий момент разгибающего движения тазобедренного сустава в соответствии со сгибающим и разгибающим движением;
Фиг.19 - график, показывающий поверхностный миоэлектрический потенциал разгибающего движения тазобедренного сустава, эталонный виртуальный вращающий момент разгибающего движения тазобедренного сустава и оцененный вращающий момент сгибающего движения тазобедренного сустава в соответствии со сгибающим и разгибающим движением;
Фиг.20 - блок-схема для описания процедуры главного процесса управления, выполняемого устройством 100 управления;
Фиг.21 - блок-схема для описания процедуры управления первой калибровки, выполняемой для установки по умолчанию в неподвижном состоянии;
Фиг.22 - блок-схема для описания процедуры управления калибровки при реконфигурировании, выполненной в соответствии с одним движением (одиночное движение); и
Фиг.23 - блок-схема для описания процедуры управления калибровкой в соответствии с предварительно определенным эталонным движением.
ОБЪЯСНЕНИЕ ССЫЛОЧНЫХ НОМЕРОВ
10 устройство помощи движению
12 владелец
20 приводной двигатель правого бедра
22 приводной двигатель левого бедра
24 приводной двигатель правого колена
26 приводной двигатель левого колена
30 пояс талии
32, 34 батарея
36 ранец управления
38a, 38b, 40a, 40b, 42а, 42b, 44a, 44b датчик миоэлектрического потенциала
50a, 50b, 52a, 52b датчик силы реакции
54 часть помощи правой ноге
55 часть помощи левой ноге
56 первый каркас (стойка)
58 второй каркас (стойка)
60 третий каркас (стойка)
62 четвертый каркас (стойка)
64 первое соединение (шарнир)
66 второе соединение (шарнир)
70, 72, 74, 76 датчик угла
78 первый застегивающийся ремень
80 второй застегивающийся ремень
84 часть, вмещающая пятку
86 схема электропитания
88 интерфейс ввода/вывода
100 устройство управления
101-108 дифференциальный усилитель
111-114 часть обнаружения угла
121-124 часть обнаружения силы реакции
130 память
140 приводной источник
142 часть обнаружения физического явления
144 часть обнаружения биосигнала
146 часть сохранения данных
148 база данных калибровки
150 база данных командных сигналов
152 часть идентификации фазы
154 часть получения разницы
156 часть коррекции параметров
158 часть усиления электрической энергии
160 управляющая часть
162 часть управления калибровкой
164 часть генерации нагрузки
Оптимальный режим осуществления изобретения
Далее, для того чтобы описать настоящее изобретение более детально, наилучший режим настоящего изобретения описывается со ссылкой на чертежи.
Первый вариант осуществления
Фиг.1 - это блок-схема, показывающая систему управления, примененную к устройству помощи движению носимого типа, согласно варианту осуществления настоящего изобретения.
Как показано на фиг.1, система управления устройством 10 помощи движению включает в себя приводной источник 140 для приложения помогающей силы к владельцу 12, часть 142 обнаружения физического явления для обнаружения угла соединения (физического явления), соответствующего движению владельца 12, и часть 144 обнаружения биосигнала для обнаружения миоэлектрического потенциала (биосигнала), соответствующего мышечной силе, сгенерированной владельцем 12.
Часть 146 хранения данных загружается с базой данных 148 калибровки для коррекции параметра командного сигнала (сигнала управления) согласно обнаруживающей способности миоэлектрического потенциала (биосигнала), соответствующего мышечной силе, сгенерированной владельцем 12, и базой данных 150 командных сигналов. Необходимо отметить, что база данных 148 калибровки включает в себя первое пространство памяти (первую часть хранения) для сохранения заранее первого соответствующего взаимоотношения между силой движения (мышечной силой), сгенерированной владельцем 12, носящим носимое устройство 18 помощи движению (см. фиг.2, фиг.3), и соответствующим биосигналом (сигнал миоэлектрического потенциала), и второе пространство памяти (вторую часть хранения) для сохранения заранее второго соответствующего взаимоотношения между силой движения (мышечной силой), сгенерированной, когда владелец 12 выполняет предварительно определенное базовое движение, и соответствующим биосигналом (сигналом миоэлектрического потенциала).
Угол соединения (θ колена, θ бедра), обнаруженный частью 142 обнаружения физического явления, и сигнал миоэлектрического потенциала (EMG колена, EMG бедра), обнаруженный частью 144 обнаружения биосигнала, вводятся в базу данных 148 калибровки и базу данных 150 командных сигналов.
Устройство 100 управления включает в себя часть 152 идентификации фазы, часть 154 получения разницы, часть 156 коррекции параметров, управляющую часть 160, часть 162 управления калибровкой и часть 164 генерации нагрузки. Кроме того, часть 162 управления калибровкой выполняет коррекцию помогающей энергии согласно биосигналам на основе биосигнала, сгенерированного базовым движением владельца 12, и второго соответствующего взаимоотношения всякий раз, когда владелец 12 носит носимое устройство 18 помощи движению.
То есть, когда владелец 12 носит носимое устройство 18 помощи движению и включает выключатель электропитания, часть 162 управления калибровкой выполняет процесс управления калибровкой так, что часть 164 генерации нагрузки разрешает части 158 усиления энергии прилагать движущую силу приводного источника 140 в качестве нагрузки (входной вращающий момент) к владельцу 12 пошаговым образом и разрешает владельцу 12 генерировать мышечную силу для уравновешивания движущей силы.
Впоследствии владелец 12 с помощью движущей силы, прилагаемой приводным источником 140, выполняет предварительно определенное движение калибровки (например, задачу A, движение вставания из сидячего положения), чтобы сгенерировать мышечную силу из скелетных мышц. Вместе с этим движением калибровки часть 142 обнаружения физического явления обнаруживает угол соединения, а часть 144 обнаружения биосигнала обнаруживает сигнал миоэлектрического потенциала.
Затем часть 152 идентификации фазы идентифицирует фазу движения калибровки владельца 12, сравнивая угол соединения, обнаруженный частью 142 обнаружения физического явления, с углом соединения, записанным в базе данных 148 калибровки.
Кроме того, при инициировании процесса управления калибровкой часть 154 получения разницы сравнивает нагрузку (входной вращающий момент) приводного источника 140, приложенную частью 164 генерации нагрузки, и мышечную силу (оцененный вращающий момент), соответствующую сигналу миоэлектрического потенциала (измеренное значение), обнаруженному частью 144 обнаружения биосигнала, получает разницу между обоими и получает вышеописанное второе соответствующее взаимоотношение.
Кроме того, на основе разницы между нагрузкой (входным вращающим моментом) и мышечной силой (оцененным вращающим моментом), полученной частью 154 получения разницы в соответствии с фазой, идентифицированной частью 152 идентификации фазы, часть 156 коррекции параметров корректирует параметр K для удовлетворения вышеупомянутого первого соответствующего взаимоотношения.
Справочный параметр не корректируется в случае, когда нет разницы между входным вращающим моментом, приложенным частью 164 генерации нагрузки через приводной источник 140, и мышечной силой, соответствующей сигналу миоэлектрического потенциала (измеренному значению), обнаруженному частью 144 обнаружения биосигнала. Однако, в случае, когда есть разница между входным вращающим моментом, приложенным частью 164 генерации нагрузки через приводной источник 140, и мышечной силой, соответствующей сигналу миоэлектрического потенциала (измеренному значению), обнаруженному частью 144 обнаружения биосигнала, параметр K корректируется так, что оба они могут совпадать. В таком случае параметр коррекции K' устанавливается так, что входной вращающий момент и оцененный вращающий момент могут стать равными.
Затем параметр, скорректированный частью 156 коррекции параметров, устанавливается как параметр владельца 12 посредством части 162 управления калибровкой, и выполняется калибровка для следующей фазы.
Соответственно, приводной источник 140 управляется так, что помогающая сила, соответствующая биосигналу, обнаруженному частью 144 обнаружения биосигнала, может быть сгенерирована на основе параметра, установленного посредством калибровки. Таким образом, управление может быть достигнуто для поддержания предварительно определенной пропорции (например, 1:1) между мышечной силой и помогающей силой, не обращая внимания на ежедневное состояние (например, значение сопротивления кожи) владельца 12 или отклонение позиции прикрепления части 144 обнаружения биосигнала.
Кроме того, управляющая часть 160 получает угол соединения (θ колена, θ бедра), обнаруженный частью 142 обнаружения физического соединения, и сигнал миоэлектрического потенциала (EMG колена, EMG бедра), обнаруженный частью 144 обнаружения биосигнала, вычисляет помогающую силу приводного источника 140, соответствующую углу соединения и сигналу миоэлектрического потенциала, для каждой фазы, используя параметр коррекции K', установленный частью управления калибровкой, и передает командный сигнал, полученный в результате вычисления, части 158 усиления электрической энергии.
Далее, примерная конфигурация устройства 10 помощи движению носимого типа описывается более детально.
Фиг.2 - передний перспективный вид, показывающий состояние, где устройство помощи движению носимого типа надето согласно варианту осуществления настоящего изобретения. Фиг.3 - задний перспективный вид, показывающий состояние, где устройство помощи движению носимого типа надето согласно варианту осуществления настоящего изобретения.
Как показано на фиг.2 и 3, устройство 10 помощи движению существует для помощи движению при ходьбе для тех, кто имеет трудности при самостоятельной ходьбе, например человек с поврежденной ногой, неспособный ходить свободно из-за ухудшения мышечной силы скелетных мышц, или пациент, проходящий реабилитацию хождением. Устройство 10 помощи движению обнаруживает биосигналы (поверхностный миоэлектрический потенциал), созданные при генерации мышечной силы в соответствии с сигналами от мозга, и работает так, чтобы приложить движущую силу от привода на основе обнаруженных сигналов.
Следовательно, устройство 10 помощи движению полностью отличается от так называемого робота воспроизводящего типа, который управляет роботизированной рукой с помощью компьютера согласно предварительно определенным входным данным и также именуется как роботизированный костюм или костюм, снабженный силовым двигателем.
Когда владелец 12, носящий устройство 10 помощи движению, выполняет движение при ходьбе согласно его/ее собственной воле, устройство 10 помощи движению прилагает движущий вращающий момент согласно биосигналу, сгенерированному при выполнении движения при ходьбе, как движущую силу так, чтобы таким образом достичь, например, ходьбы посредством использования половины мышечной силы, обычно требуемой для ходьбы. Следовательно, владелец 12 способен поддерживать его/ее полный вес и ходить благодаря комбинации его/ее собственной мышечной силы и движущего вращающего момента от привода (в этом варианте осуществления используется приводной электродвигатель).
В таком случае устройство 10 помощи движению управляется так, что помогающая сила (вращающий момент двигателя) согласно смещению центра массы вместе с движением при ходьбе (описано ниже) отражает волю владельца 12. Следовательно, привод устройства 10 помощи движению управляется так, чтобы не прикладывать нагрузку, которая противоположна воле владельца 12, и чтобы не препятствовать движению владельца 12.
Кроме того, устройство 10 помощи движению может помогать движению, отличному от движения при ходьбе, такому как движение, в котором владелец 12 встает из положения сидя на стуле, или движение, в котором владелец 12 садится из положения стоя. Кроме того, владельцу 12 может быть оказана помощь с помощью энергии, когда владелец 12 поднимается или спускается по лестнице. Хотя движение при подъеме по лестнице или спускании с лестницы может быть трудным для человека, имеющего слабую мышечную силу, владелец 12, носящий устройство 10 помощи движению, может двигаться без беспокойства о его/ее ослабленной мышечной силе, будучи поддерживаемым с помощью движущего вращающего момента в соответствии с его/ее собственной волей.
Далее описывается примерная конфигурация устройства 10 помощи движению.
Как показано на фиг.2 и 3, устройство 10 помощи движению имеет привод (соответствующий приводному источнику 140), включенный в носимое устройство 18 помощи движению, которое носит владелец 12. Привод включает в себя приводной двигатель 20 правого бедра, расположенный на правом тазобедренном суставе владельца 12, приводной двигатель 22 левого бедра, расположенный на левом тазобедренном суставе владельца 12, приводной двигатель 24 правого колена, расположенный на правом коленном суставе владельца 12, и приводной двигатель 26 левого колена, расположенный на левом коленном суставе владельца 12. Эти приводные двигатели 20, 22, 24, 26 являются приводными источниками, включающими в себя сервоприводы, имеющие свои вращающие моменты, управляемые сигналами управления от управляющего устройства, и включают в себя механизм замедления (не показан) для замедления вращения двигателя до предварительно определенного коэффициента замедления. Хотя приводные двигатели 20, 22, 24, 26 являются маленькими, они могут приложить значительную движущую силу.
Кроме того, батареи 32, 34, которые функционируют как источник энергии для приведения в движение приводных двигателей 20, 22, 24, 26, прикреплены к поясу 30 талии, носимому вокруг талии владельца 12. Батареи 32, 34 являются перезаряжаемыми батареями и отдельно размещаются слева и справа так, чтобы не затруднять движение при ходьбе владельца 12.
Кроме того, ранец 36 управления, прикрепленный к спине владельца 12, содержит, например, управляющее устройство, привод электродвигателя, измеряющее устройство и силовую цепь (описано ниже). Необходимо отметить, что нижняя часть ранца 36 управления поддерживается поясом 30 талии и установлена таким образом, в котором вес ранца 36 управления не обременяет владельца 12.
Кроме того, устройство 10 помощи движению включает в себя датчики 38a, 38b миоэлектрического потенциала для обнаружения поверхностного миоэлектрического потенциала (EMG бедра), соответствующего движению правого бедра владельца 12, датчики 40a, 40b миоэлектрического потенциала для обнаружения поверхностного миоэлектрического потенциала (EMG бедра), соответствующего движению левого бедра владельца 12, датчики 42a, 42b миоэлектрического потенциала для обнаружения поверхностного миоэлектрического потенциала (EMG колена), соответствующего движению правого колена, и датчики 44a, 44b миоэлектрического потенциала для обнаружения поверхностного миоэлектрического потенциала (EMG колена), соответствующего движению левого колена.
Каждый из этих датчиков 38a, 38b, 40a, 40b, 42a, 42b, 44a и 44b миоэлектрического потенциала является обнаруживающей частью для измерения поверхностного миоэлектрического потенциала, созданного во время генерации мышечной силы скелетных мышц, и включает в себя электрод (не показан) для обнаружения слабого потенциала, сгенерированного в скелетных мышцах. Необходимо отметить, что в этом варианте осуществления каждый из этих датчиков 38a, 38b, 40a, 40b, 42a, 42b, 44a и 44b миоэлектрического потенциала прикреплен посредством приклеивания липкой изоляции, которая покрывает площадь, окружающую электрод, к поверхности кожи владельца 12.
В теле человека синоптическая передача вещества ацетилхолина передается к поверхности мышц, формирующих скелетные мышцы, согласно командам мозга. В результате ионная проницаемость сарколеммы изменяется так, чтобы таким образом сгенерировать потенциал действия (EMG: электромиограмму миоэлектричества). Соответственно, потенциал действия вызывает втягивание сарколеммы и генерирует мышечную силу. Соответственно, мышечная сила, сгенерированная при ходьбе, может быть оценена посредством обнаружения миоэлектрического потенциала скелетных мышц. На основе оцененной мышечной силы может быть получена помогающая сила, требуемая для ходьбы.
Кроме того, хотя мышцы растягиваются и сокращаются, когда кровь поставляет протеин, называемый актином и миозином, мышечная сила генерируется, когда мышцы сокращаются. В суставе, где две кости соединены вместе с возможностью вращения, сгибающая мышца для генерации силы в направлении сгибания сустава и разгибающая мышца для генерации силы в направлении распрямления предусмотрены между двумя костями.
Кроме того, в теле человека есть многочисленные мышцы ниже талии для движения ног, такие как подвздошно-поясничная мышца (musculi iliopsoas) для поднимания бедра вперед, большая ягодичная мышца (musculus gluteus maximus) для опускания бедра, четырехглавая мышца (quadriceps) для распрямления коленей и двуглавая мышца бедра (biceps femoris) для сгибания коленей.
Датчики 38a, 40a миоэлектрического потенциала, которые прикреплены к передней непосредственной части бедра владельца 12, измеряют миоэлектрический потенциал мышечной силы, сгенерированной, когда нога переносится вперед, посредством обнаружения поверхностного миоэлектрического потенциала от musculi iliopsoas.
Датчики 38b, 40b миоэлектрического потенциала, которые прикреплены к бедру владельца 12, измеряют миоэлектрический потенциал, соответствующий мышечной силе, сгенерированной, например, при отталкивании ногой сзади или поднятии по лестнице, посредством обнаружения поверхностного миоэлектрического потенциала от musculus gluteus maximus.
Датчики 42a, 44a миоэлектрического потенциала, которые прикреплены с передней стороны на коленях владельца 12, измеряют миоэлектрический потенциал, соответствующий мышечной силе, сгенерированной при переносе части ниже коленей вперед, посредством обнаружения поверхностного миоэлектрического потенциала от guadriceps.
Датчики 42b, 44b миоэлектрического потенциала, которые прикреплены с задней стороны на коленях владельца 12, измеряют миоэлектрический потенциал, соответствующий мышечной силе, сгенерированной при отведении части ниже коленей назад, посредством обнаружения поверхностного миоэлектрического потенциала от biceps femoris.
Соответственно, в устройстве 10 помощи ток возбуждения, который должен быть подан четырем приводным двигателям 20, 22, 24 и 26, получается на основе поверхностного миоэлектрического потенциала, обнаруженного этими датчиками 38a, 38b, 40a, 40b, 42a, 42b, 44a и 44b миоэлектрического потенциала. Посредством приведения в действие приводных двигателей 20, 22, 24 и 26 с помощью тока возбуждения прикладывается помогающая сила для поддержки движения при ходьбе владельца 12.
Кроме того, необходимо обнаружить нагрузку, приложенную к ступне для выполнения смещения центра массы, вызванного движением при ходьбе. Следовательно, датчики 50a, 50b, 52a, 52b силы реакции (показанные с помощью прерывистых линий на фиг.2 и 3) предусмотрены на обратной стороне левой и правой ступней владельца 12.
Кроме того, датчик 50a силы реакции обнаруживает силу реакции против нагрузки на переднюю часть правой ступни, а датчик 50b силы реакции обнаруживает силу реакции против нагрузки на заднюю часть правой ступни. Датчик 52a силы реакции обнаруживает силу реакции против нагрузки на переднюю часть левой ступни, а датчик 52b силы реакции обнаруживает силу реакции против нагрузки на заднюю часть левой ступни. Каждый датчик 50a, 50b, 52a и 52b силы реакции, включающий в себя, например, пьезоэлектрический элемент, способен обнаружить изменения нагрузки в соответствии со смещением веса и обнаружить, соприкасается ли ступня владельца 12 с землей.
Далее конфигурация носимого устройства 18 помощи движению описывается со ссылкой на фиг.4 и 5.
Фиг.4 является видом слева носимого устройства 18 помощи движению. Фиг.5 - это вид сзади носимого устройства 18 помощи движению.
Как показано на фиг.4 и 5, носимое устройство 18 помощи движению включает в себя пояс 30 талии, надетый вокруг талии владельца, часть 54 помощи правой ноге, предусмотренную на правой стороне ниже пояса 30 талии, и часть 55 помощи левой ноге, предусмотренную на левой стороне ниже пояса 30 талии.
Часть 54 помощи правой ноге и часть 55 помощи левой ноге размещаются симметрично друг другу, в которых каждая включает в себя первый каркас 56, протянутый ниже пояса 30 талии для поддержки пояса 30 талии, второй каркас 58, протянутый ниже первого каркаса 56 и сформированный вдоль внешней стороны бедра владельца 12, третий каркас 60, протянутый ниже второго каркаса 58 и сформированный вдоль внешней части голени владельца 12, и четвертый каркас 62, на котором располагается нижняя часть ступни (подошва обуви, когда обувь носится) владельца 12.
Первое соединение 64, имеющее подшипниковую структуру, располагается между нижним краем первого каркаса 56 и верхним краем второго каркаса 58 для соединения с возможностью вращения первого каркаса 56 и второго каркаса 58. Первое соединение 64 располагается на уровне, соответствующем высоте тазобедренного сустава. Первый каркас 56 соединяется с поддерживающей стороной первого соединения 64, а второй каркас 58 соединяется с вращающейся стороной первого соединения 64.
Кроме того, второе соединение 66, имеющее подшипниковую структуру, располагается между нижним краем второго каркаса 58 и верхним краем третьего каркаса 60 для соединения с возможностью вращения второго каркаса 58 и третьего каркаса 60. Второе соединение 66 располагается на уровне, соответствующем высоте коленного сустава. Второй каркас 58 соединяется с поддерживающей стороной второго соединения 66, а третий каркас 60 соединяется с вращающейся стороной второго соединения 66.
Следовательно, второй каркас 58 и третий каркас 60 присоединяются таким образом, будучи способными колебаться, имея первое соединение 64 и второе соединение 66 в качестве осей вращения по отношению к первому каркасу 56, связанному с поясом 30 талии. То есть, второй каркас 58 и третий каркас 60 сконфигурированы так, чтобы выполнять те же движения, что и соответствующая нога владельца 12.
Кроме того, кронштейны 68 двигателя предусмотрены на поддерживающих сторонах первого соединения 64 и второго соединения 66. Кронштейн 68 двигателя включает в себя поддерживающую двигатель часть 68a, выдающуюся наружу в горизонтальном направлении. Приводной двигатель 20, 22, 24, 26 прикрепляется к поддерживающей двигатель части 68a в вертикальном состоянии. Таким образом, приводной двигатель 20, 22, 24, 26 предусмотрен без того, чтобы выступать слишком далеко в сторону так, чтобы избежать соприкосновения с окружающими препятствиями во время движения при ходьбе.
Кроме того, первое соединение 64 и второе соединение 66 сконфигурированы так, чтобы позволять вращающемуся валу приводных двигателей 20, 22, 24, 26 передавать вращающий момент второму каркасу 58, третьему каркасу 60 (принимающей движение стороне) через шестерню.
Кроме того, приводные двигатели 20, 22, 24, 26 включают в себя датчик 70, 72, 74, 76 угла (соответствующие части 142 обнаружения физического явления) для обнаружения угла соединения. Датчик 70, 72, 74 и 76 угла включает в себя, например, угловой кодер, который подсчитывает пульсации в пропорции к углу соединения первого соединения 64 и второго соединения 66 и выводит электрические сигналы (в качестве вывода датчика) в соответствии с числом пульсаций, соответствующих углу соединения.
Датчики 70, 72 угла обнаруживают угол поворота между первым каркасом 56 и вторым каркасом 58, который соответствует углу соединения (θ бедра) тазобедренного сустава владельца 12. Кроме того, датчики 74, 76 угла обнаруживают угол поворота между вторым каркасом 58 и третьим каркасом 60, который соответствует углу соединения (θ колена) коленного сустава владельца 12.
Необходимо отметить, что первое соединение 64 и второе соединение 66 сконфигурированы так, чтобы вращаться в диапазоне, в котором тазобедренный сустав и коленный сустав владельца 12 могут вращаться. Первое соединение 64 и второе соединение 66 имеют установленный останавливающий механизм (не показан) для предотвращения чрезмерного движения тазобедренного сустава и коленного сустава владельца 12.
Второй каркас 58 имеет прикрепленный первый застегивающийся ремень 78, который должен застегиваться на бедре владельца 12. Кроме того, третий каркас 60 имеет прикрепленный второй застегивающийся ремень 80, который должен застегиваться на части ниже колена владельца 12. Соответственно, вращающий момент, сгенерированный приводными двигателями 20, 22, 24, 26, передается второму каркасу 58 и третьему каркасу 60 через шестерню и далее передается как помогающая сила ноге пользователя 12 через первый застегивающийся ремень 78 и второй застегивающийся ремень 80.
Кроме того, четвертый каркас 62 соединен с возможностью вращения с нижним концом третьего каркаса 60 через ось 82. Кроме того, поддерживающая пятку часть 84 предусмотрена на нижнем конце четвертого каркаса 62 для размещения части пятки подошвы обуви владельца 12 в ней. Кроме того, второй каркас 58 и третий каркас 60 могут иметь свои длины в направлении оси, установленные винтовым механизмом так, что длина может быть установлена в соответствии с длиной ноги владельца 12.
Каждый каркас 56, 58, 60, 62 сформирован из металла и сконфигурирован так, чтобы поддерживать вес батарей 32, 34, предусмотренных на поясе 30 талии, ранец 36 управления и носимое устройство 18 помощи движению. То есть, устройство 10 помощи движению сконфигурировано так, чтобы предохранять вес носимого устройства 18 помощи движению и т.д. от воздействия на владельца 12, и присоединяется таким образом, чтобы предохранить владельца 12, имеющего ослабленные мышцы, от излишней прикладываемой нагрузки.
Фиг.6 является блок-схемой соответствующих компонентов, включенных в устройство 10 помощи движению. Как показано на фиг.6, батареи 32, 34 подают электроэнергию схеме 86 электропитания. Схема 86 электропитания преобразует энергию в предварительно определенное напряжение и подает постоянное напряжение на интерфейс 88 ввода/вывода. Кроме того, зарядная емкость батарей 32, 34 контролируется частью 90 предупреждения о разряде батареи. Часть 90 предупреждения о разряде батареи выводит предупреждение, когда оставшаяся зарядная емкость становится меньше, чем предварительно определенное количество, чтобы информировать владельца 12 о том, что необходимо заменить или зарядить батареи.
Приводы 92-95, с первого по четвертый, двигателя, которые управляют приводными двигателями 20, 22, 24, 26 соответственно усиливают напряжения возбуждения, соответствующие управляющим сигналам от управляющего устройства 100, через интерфейс 88 ввода/вывода и выводят напряжения возбуждения на приводные двигатели 20, 22, 24 и 26.
Сигналы обнаружения поверхностного миоэлектрического потенциала, выведенные из каждого датчика 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала, усиливаются с первого по восьмой дифференциальными усилителями (соответствующими части 158 усиления электрической энергии) 101-108, затем преобразуются в цифровые сигналы посредством аналого-цифрового преобразователя (не показан) и затем вводятся в управляющее устройство 100 через интерфейс 88 ввода/вывода. Необходимо отметить, что миоэлектрический потенциал, сгенерированный мышцами, является слабым. Следовательно, для того чтобы с первого по восьмой дифференциальным усилителям 101-108 усилить миоэлектрический потенциал (например, 30 мкВ) до напряжения, различаемого компьютером (например, приблизительно 3 В), требуется усиление в 100 дБ (105).
Кроме того, сигналы обнаружения угла, выводимые от датчиков 70, 72, 74, 76 угла, вводятся в соответствующие с первой по четвертую части 111-114 обнаружения угла соответственно. Первая-четвертая части 111-114 обнаружения угла преобразуют обнаруженные импульсы в значения данных об углах, соответствующие углам, посредством использования углового кодера и вводят обнаруженные данные об угле в управляющее устройство 100 через интерфейс 88 ввода/вывода.
Сигналы обнаружения силы реакции, выводимые от датчиков 50a, 50b, 52a, 52b силы реакции, вводятся в соответствующие первую-четвертую части 121-124 обнаружения силы реакции соответственно. Первая-четвертая части 121-124 обнаружения угла преобразуют обнаруженные напряжения в цифровые значения, соответствующие силе, используя пьезоэлектрические элементы, и вводят обнаруженные данные о силе реакции в управляющее устройство 100 через интерфейс 88 ввода/вывода.
Память (соответствующая части 146 хранения данных) 130 является частью хранения для хранения в ней соответствующих данных. Память 130 включает в себя, например, область 130A хранения базы данных для хранения управляющих данных в единицах фаз, соответствующих каждому примеру движения (задаче), такому как движение при вставании, движение при ходьбе или движение при посадке, и область 130B хранения программы управления для хранения управляющих программ для управления каждым двигателем.
В этом варианте осуществления база 148 данных калибровки и база 150 данных командных сигналов сохраняются в области 130A хранения баз данных. Кроме того, как показано на фиг.8, база 148 данных калибровки хранит первое соответствующее взаимоотношение между мышечной силой (энергией) eA1(t) и биосигналом EA1(t), сгенерированным владельцем 12, носящим носимое устройство 18 помощи движению, и относительный параметр KA1. Кроме того, в первом соответствующем взаимоотношении мышечная сила eA1(t) и биосигнал EA1(t) формируют пропорциональное отношение и имеют положительное соотношение (коррекцию).
Кроме того, база 148 данных калибровки хранит второе соответствующее взаимоотношение между мышечной силой (энергией) e'A1(t) и биосигналом EA1(t), сгенерированным во время процесса, когда владелец 12 выполняет предварительно определенное базовое движение, и параметр коррекции K'A1. Второе соответствующее взаимоотношение является отношением между изменениями биосигнала EA1(t) и изменениями мышечной силы (энергии) eA1(t) во время базового движения.
Кроме того, управляющие данные, выведенные из управляющего устройства 100, выводятся в часть 132 вывода данных и блок 134 связи через интерфейс 88 ввода/вывода для отображения на мониторе (не показан) или передачи компьютеру наблюдения за данными (не показан) посредством передачи данных, например.
Кроме того, управляющее устройство 100 включает в себя автономную управляющую часть 100A (соответствующую управляющей части 160), которая сравнивает угол соединения, обнаруженный датчиком 70, 72, 74, 76 угла, и угол соединения контрольного параметра, чтобы идентифицировать фазу примера движения владельца 12, и генерирует командный сигнал для генерации энергии, соответствующей фазе.
Кроме того, управляющее устройство 100 включает в себя: часть 100D генерации нагрузки, которая прилагает предварительно определенную движущую силу от приводного двигателя (приводного источника) 20, 22, 24, 26 как внешнюю нагрузку; часть 100E установки значения коррекции (соответствующую части 156 коррекции параметров), которая обнаруживает биосигнал, сгенерированный в ответ на приложенную движущую силу, с помощью датчика (обнаруживающей части) 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала, генерирует параметр (например, пропорциональный прирост в пропорциональном управлении) для вычисления посредством автономной управляющей части 100A на основе обнаруженного сигнала и устанавливает параметр как уникальное значение коррекции владельца; и часть 100F управления калибровкой, которая управляет движением, например, части 100E установки значения коррекции, чтобы установить скорректированный параметр в качестве уникального параметра владельца 12.
Калибровка в этом варианте осуществления включает в себя, например, калибровку по умолчанию, которая выполняется, когда носимое устройство 18 помощи движению носится первый раз (например, при покупке), и калибровку при реконфигурировании, которая выполняется каждый раз, когда носимое устройство 18 помощи движению носится после калибровки по умолчанию.
В калибровке по умолчанию процесс установки значения коррекции выполняется посредством того, что владелец 12 должен оставаться неподвижным в предварительно определенной позиции (описано ниже).
Кроме того, калибровка при реконфигурировании включает в себя, например, калибровку неподвижного состояния, где процесс обновления значения коррекции выполняется посредством того, что владелец 12 должен генерировать мышечную силу в неподвижном состоянии, или калибровку одного движения, где процесс обновления значения коррекции выполняется посредством того, что стоящий владелец 12 сгибает и разгибает свои колени один раз из состояния согнутых коленей.
При выполнении калибровки нагрузка, прилагаемая к владельцу 12, первоначально устанавливается такой, чтобы быть небольшой нагрузкой, и постепенно увеличивается вместе с продвижением операций калибровки за счет управления приводными двигателями 20, 22, 24 и 26 и обнаружения биосигналов, сгенерированных в ответ на движущие силы приводных двигателей 20, 22, 24 и 26. Кроме того, в устройстве 10 помощи движению носимого типа этого варианта осуществления возможно выбрать одну из двух калибровок, как выполняемую в качестве калибровки по умолчанию в неподвижном состоянии и калибровки при реконфигурировании, выполняемой в качестве одной калибровки движения каждый раз, когда устройство 10 помощи движению носимого типа носится.
Далее описывается функционирование при выполнении калибровки владельцем 12 со ссылкой на фиг.7-9. Фиг.7 является схематическим чертежом, показывающим пример каждой задачи и фазы, сохраненной в каждой базе данных.
Как показано на фиг.7, задачи, которые распределяют по категориям движения владельца 12, сохраняются в памяти 130, например задача A, включающая в себя данные движения вставания, где владелец 12 переходит из положения сидя в стоящее положение, задача B, включающая в себя данные о движении при ходьбе, где владелец 12 идет из стоячего состояния, задача C, включающая в себя данные о движении при посадке, где владелец 12 переходит из стоячего состояния в сидячее состояние, и задача D, включающая в себя данные о движении при подъеме по лестнице, где владелец 12 переходит из стоячего состояния в состояние подъема по лестнице.
Кроме того, множественные данные о фазах, определяющие минимальную единицу измерения движения, устанавливаются каждой задаче. Например, в случае движения при ходьбе задачи B сохраняется фаза B1, включающая в себя данные о движении из состояния, где обе ноги распрямлены, фаза B2, включающая в себя данные о движении из состояния, где правая нога выдвигается вперед, фаза B3, включающая в себя данные о движении из состояния, где левая нога выдвигается вперед, чтобы выровняться с правой ногой, и фаза B4, включающая в себя данные о движении из состояния, где левая нога переносится вперед перед правой ногой.
Фиг.8 - это схематический вид, показывающий базу данных 148 калибровки.
Как показано на фиг.8, база данных 148 калибровки хранит, например, поверхностный миоэлектрический потенциал eA1(t)..., обнаруженный согласно каждой фазе, разделенной в соответствии с каждой задачей A, B, ..., и справочный параметр KA1..., соответствующий миоэлектрическому потенциалу.
В этом варианте осуществления владелец 12, носящий носимое устройство 18 помощи движению, выполняет предварительно определенную операцию калибровки. Например, как показано на фиг.9, владелец 12 выполняет движение вставания из сидячего состояния (фаза A1-A4) в качестве базового движения и затем выполняет движение обратной посадки (фаза A4-A1).
Далее принцип калибровки части 144 обнаружения биосигнала, которая обнаруживает миоэлектрический потенциал, соответствующий мышечной силе, сгенерированной владельцем 12, описывается более детально.
В случае, когда владелец 12 делает едва различимое движение, взаимоотношение между поверхностным миоэлектрическим потенциалом и мышечной силой, сгенерированной владельцем 12, является по существу линейным. Соответственно, есть способ, разработанный для оценки вращающего момента, сгенерированного владельцем 12, на основе поверхностного миоэлектрического потенциала, измеренного посредством следующих формул (1) и (2).
Необходимо отметить, что оцененный вращающий момент именуется как "виртуальный вращающий момент".


В формулах (1) и (2), "τhip" означает виртуальный вращающий момент тазобедренного сустава, "τknee" означает виртуальный вращающий момент коленного сустава, "e1-e4" означают поверхностный миоэлектрический потенциал, генерированный мышцами, а "K1-K4" означают параметры. Тазобедренный сустав и коленный сустав владельца 12 двигаются согласно балансу растяжения и сокращения сгибающей и разгибающей мышцы. Как показано на фиг.10(A)(B) и фиг.11(A)(B), "e1" указывает поверхностный миоэлектрический потенциал прямого мускула (rectus femoris), "e2" указывает потенциал большой ягодичной мышцы (musculus gluteus maximus), "e3" указывает поверхностный миоэлектрический потенциал медиальной широкой мышцы бедра (musculus vastus medialis), а "e4" указывает поверхностный миоэлектрический потенциал двуглавой мышцы бедра (biceps femoris).
В вычислении виртуального вращающего момента значения, отфильтрованные через цифровой фильтр, используются, принимая во внимание помехи. В этом варианте осуществления значения, отфильтрованные через низкочастотный фильтр, получаются как значения поверхностного миоэлектрического потенциала.
В калибровке системы управления для обнаружения поверхностного миоэлектрического потенциала каждый параметр K из следующей формулы (3) извлекает виртуальный вращающий момент соответствующей мышцы посредством формул (1) и (2).

То есть, в калибровке из этого варианта осуществления значение параметра K из формулы (3) вычисляется так, что значение поверхностного миоэлектрического потенциала становится 1, когда энергия, сгенерированная целевой мышцей, - 1 Нм. Это значение обновляется.
Соответственно, в этом варианте осуществления либо в случае калибровки по умолчанию, либо калибровки при реконфигурировании, значение вышеописанного параметра корректируется посредством использования результатов обнаружения с датчиков 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала.
Далее описывается калибровка при реконфигурировании. Эта калибровка может быть применена к одному движению, когда владелец 12 в сидячем состоянии двигает свои колени из согнутого состояния в разогнутое состояние, может уменьшить нагрузку на владельца 12 и может завершить калибровку в короткое время.
Фиг.12 - это схематический вид, показывающий состояние сгибающей мышцы коленного сустава владельца 12, носящего носимое устройство 18 помощи движению.
Как показано на фиг.12, в состоянии, когда носимое устройство 18 помощи движению носится владельцем 12, входной вращающий момент τm прилагается в качестве нагрузки к коленному суставу, используя приводные двигатели 20, 22, 24, 26. Владелец 12 сохраняет неподвижное состояние недвигающегося коленного сустава, прилагая мышечную силу для уравновешивания входного вращающего момента τm. В таком состоянии может быть сказано, что входной вращающий момент τm, приложенный от приводных двигателей 20, 22, 24, 26, и мышечная сила τh, сгенерированная владельцем, равны. Соответственно, следующая формула (4) может быть удовлетворена.

Так как мышечная сила, сгенерированная владельцем 12 согласно формуле (3), может быть указана как
 ,
,
формула (4) может быть перезаписана как

Далее описывается процедура выполнения калибровки по умолчанию в неподвижном состоянии.
Калибровка по умолчанию в неподвижном состоянии выполняется с помощью следующих этапов.
(Этап 1) Поверхностный миоэлектрический потенциал e измеряется, когда владелец 12 генерирует мышечную силу, в противоположном направлении движущей силы (вращающему моменту τm) приводных двигателей 20, 22, 24, 26.
(Этап 2) Параметр K получается для удовлетворения формулы (6), используя способ наименьших квадратов на основании измеренного поверхностного миоэлектрического потенциала e и соответствующего входного вращающего момента τm.
Формула, использующая способ наименьших квадратов для получения параметра K, показана с помощью нижеприведенной формулы (7).

Соответственно, параметр K может быть получен посредством удовлетворения отношения, где, например, значение поверхностного миоэлектрического потенциала становится 1, когда владелец 12, имеющий его/ее коленный сустав, согнутый приблизительно на 90 градусов в неподвижном сидячем состоянии, генерирует силу 1 Нм, как показано на фиг.12. В этом неподвижном состоянии приводные двигатели 20, 22, 24, 26 прилагают движущую силу (вращающий момент τm) в качестве нагрузки (входного вращающего момента) к владельцу 12 пошаговым образом, пока владелец 12 генерирует мышечную силу, уравновешивающую движущую силу для сохранения неподвижного состояния.
Далее описывается процедура выполнения реконфигурирования калибровки при предварительно определенных базовых движениях.
Калибровка при реконфигурировании для одного состояния выполняется с помощью следующих этапов.
(Этап 1) Владелец 12 вращает коленный сустав так, что угол колена изменяется с 90 градусов до 180 градусов, а затем коленный сустав возвращается в свою первоначальную позицию так, что угол колена изменяется со 180 градусов до 90 градусов.
(Этап 2) Приводной двигатель 20, 22, 24, 26 прилагает движущую силу (вращающий момент τm) согласно углу коленного сустава, обнаруженному датчиком 74, 76 угла.
(Этап 3) Измеряется поверхностный миоэлектрический потенциал e, сгенерированный при сгибании и разгибании колена владельцем 12.
(Этап 4) Параметр K, удовлетворяющий формуле (6), получается посредством использования способа наименьших квадратов на основании измеренного поверхностного миоэлектрического потенциала и соответствующего входного вращающего момента τm.
Далее описывается принцип выполнения вышеописанной калибровки по умолчанию со ссылкой на фиг.13-15.
Например, параметр K получается посредством приложения вращающего момента в 8 Нм, 16 Нм, 24 Нм и 32 Нм к владельцу 12 от приводных двигателей 20, 22, 24, 26. Фиг.13 и 14 показывают результаты вычисления виртуального вращающего момента исходя из поверхностного миоэлектрического потенциала, сгенерированного при калибровке с использованием полученного параметра K, и сравнение виртуального вращающего момента с соответствующим входным вращающим моментом. Необходимо отметить, что фиг.13 является графиком, показывающим входной вращающий момент (a) и виртуальный вращающий момент (b) относительно разгибающей мышцы правого тазобедренного сустава. Фиг.14 - это график, показывающий входной вращающий момент (a) и виртуальный вращающий момент (b) по отношению к сгибающей мышце правого тазобедренного сустава.
Ссылаясь на входной вращающий момент графика (a) и виртуальный вращающий момент из графика (b), показанные на фиг.13, и входной вращающий момент из графика (a) и виртуальный вращающий момент из графика (b), показанные на фиг.14, может быть понятно, что существует относительное совпадение между виртуальным вращающим моментом, вычисленным посредством использования параметра K с использованием вышеописанного способа, и входным вращающим моментом, приложенным в соответствии с движением.
Кроме того, как показано на графике (a) на фиг.13, для входного вращающего момента от приводных двигателей 20, 22, 24, 26 приводные двигатели управляются так, чтобы иметь значение своего вращающего момента увеличивающимся постепенно вместе с течением времени. То есть, следовательно, приводные двигатели 20, 22, 24, 26 первоначально запускаются с малым значением вращающего момента. Кроме того, входной вращающий момент прилагается импульсно в предварительно определенные интервалы времени. Кроме того, значение вращающего момента управляется так, чтобы возрастать постепенно.
Соответственно, может быть предотвращено применение чрезмерного вращающего момента, когда владелец 12 носит носимое устройство 18 помощи движению. Увеличивая значение входного вращающего момента постепенно, уменьшается нагрузка при генерации мышечной силы для противостояния входному вращающему моменту. Таким образом, нагрузка на мышцы во время калибровки может быть уменьшена.
Кроме того, как показано на фиг.13 и 14, одни и те же результаты могут быть получены для левого и правого тазобедренных суставов и левого и правого коленных суставов. Кроме того, в случае генерации помогающей силы от виртуального вращающего момента посредством использования параметра K, как описано выше, приводные двигатели 20, 22, 24, 26 могут приложить движущую силу в 1 Нм в качестве помогающей силы относительно мышечной силы в 1 Нм, сгенерированной владельцем 12. Таким образом, владелец 12 может двигаться, используя половину мышечной силы, требуемой для выполнения предварительно определенного движения.
Кроме того, в этом варианте осуществления, так как необходимо сгенерировать мышечную силу для противостояния входному вращающему моменту в случае, когда владелец 12, носящий носимое устройство 18 помощи движению, выполняет калибровку, калибровка выполняется посредством управления движущей силой приводных двигателей 20, 22, 24, 26 так, чтобы предотвратить слишком большую нагрузку, прилагаемую к владельцу 12.
То есть, в этом варианте осуществления, посредством того, что владелец 12 должен выполнить предварительно определенное движение (например, см. фиг.9 или фиг.12) для выполнения калибровки поверхностного миоэлектрического потенциала, калибровка поверхностного миоэлектрического потенциала может быть выполнена без приложения большой нагрузки к владельцу 12.
Например, в случае, когда предварительно определенное движение выполняется дважды, виртуальный вращающий момент должен быть равным мышечной силе, сгенерированной из каждого сустава в соответствии с движением. Следовательно, сохраняя примеры виртуального вращающего момента, соответствующие эталонным движениям в качестве справочных данных в памяти 130 заранее, процесс коррекции параметра во время калибровки может быть проведен эффективно.
Таким образом, следующая формула (8) может быть удовлетворена в случае, когда "τi(t)" является виртуальным вращающим моментом, полученным, когда владелец 12 выполняет предварительно определенное движение, используя параметр K, полученный посредством калибровки владельца 12, а "e'(t)" является поверхностным миоэлектрическим потенциалом, когда движение выполняется снова.

Ссылаясь на фиг.15, в случае выполнения калибровки поверхностного миоэлектрического потенциала, поверхностный миоэлектрический потенциал, сгенерированный во время случая, когда владелец 12 выполняет такое же движение, что и эталонное предварительно определенное движение (иллюстрированное как сплошная линия на графике (a) на фиг.15), измеряется, а затем параметр K' определяется таким образом, что виртуальный вращающий момент (иллюстрированный как прерывистая линия на графике (b) на фиг.15) становится равным входному вращающему моменту.
Следующая формула (9), примененная для вычисления параметра K', использующая способ наименьших квадратов, является такой же, что и вышеописанная формула (7).

Так как виртуальный вращающий момент τi получается посредством калибровки с использованием устройства 10 помощи движению носимого типа, можно сказать, что полученный параметр K' равен тому, что получен посредством калибровки с использованием устройства 10 помощи движению носимого типа. Соответственно, помогающая сила в 1 Нм может быть приложена к владельцу 12 в ответ на мышечную силу в 1 Нм, сгенерированную способом калибровки, соответствующим предварительно определенному движению владельца 12.
Далее фиг.17 и 18 показывают результаты опыта в случае, где, например, сгибающее и распрямляющее движение (как показано на фиг.16) является базовым движением, использующим калибровку согласно варианту осуществления настоящего изобретения.
График (a) на фиг.17 показывает углы соединения тазобедренного сустава, которые изменяются в соответствии со сгибающим и распрямляющим движением, а график (b) на фиг.17 показывает углы соединения коленного сустава, которые изменяются в соответствии со сгибающим и разгибающим движением.
На фиг.18 график (a) показывает виртуальный вращающий момент сгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим и разгибающим движением, график (b) показывает виртуальный вращающий момент разгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим и разгибающим движением, график (c) показывает виртуальный вращающий момент сгибающего движения коленного сустава в ассоциативной связи со сгибающим и разгибающим движением, и график (d) показывает виртуальный вращающий момент разгибающего движения коленного сустава в ассоциативной связи со сгибающим и разгибающим движением.
Далее, в случае, где вышеописанное сгибающее и разгибающее движение выполняется в качестве базового движения, результаты коррекции сгибающей мышцы и разгибающей мышцы правого тазобедренного сустава, показанные на фиг.18 и 19, получаются, когда выполняется калибровка согласно сгибающему и разгибающему движению. На фиг.18, график (a) показывает поверхностный миоэлектрический потенциал разгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением, график (b) показывает справочный виртуальный вращающий момент разгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением, и график (с) показывает оцененный вращающий момент разгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением. Кроме того, на фиг.19, график (a) показывает поверхностный миоэлектрический потенциал сгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением, график (b) показывает справочный вращающий момент сгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением, и график (с) показывает оцененный вращающий момент сгибающего движения тазобедренного сустава в ассоциативной связи со сгибающим движением.
Согласно графикам (a)-(с), показанным на фиг.18 и 19, может быть понято, что виртуальный вращающий момент, использованный в качестве эталона, и оцененный вращающий момент параметра K', полученный из калибровки, имеют похожие формы амплитуды волн, и что оцененный вращающий момент в ассоциативной связи со сгибающим и разгибающим движением имеет по существу одинаковый размер, что и виртуальный вращающий момент, полученный из поверхностного миоэлектрического потенциала.
Соответственно, в этом варианте осуществления владелец 12 может выполнить калибровку поверхностного миоэлектрического потенциала, выполняя предварительно определенное движение. Таким образом, владелец 12 может быть предохранен от приложения чрезмерной нагрузки, а параметр K' для получения виртуального вращающего момента (то есть, калиброванный поверхностный миоэлектрический потенциал) может быть вычислен мгновенно.
Необходимо отметить, что вращающий момент, приложенный в качестве нагрузки к владельцу 12, может быть установлен в соответствии с физической силой каждого человека. Например, устанавливая значение верхнего лимита нагрузки и значение нижнего лимита нагрузки заранее, нагрузка во время калибровки может быть отрегулирована так, чтобы предотвратить чрезмерную нагрузку, которая должна быть приложена к владельцу 12.
Далее, процедура главного процесса управления, выполняемого управляющим устройством 100, описывается со ссылкой на блок-схему, показанную на фиг.20.
Как показано на фиг.20, когда носимое устройство 18 помощи движению носится владельцем 12 и его переключатель электропитания (не показан) включается на этапе S11 (далее здесь слово "Этап" опускается), управляющее устройство 100 определяет, выполняется ли операция включения переключателя электропитания в первый раз в S12. В случае, когда это первый раз в S12, управляющее устройство 100 переходит в состояние по умолчанию в S13 и руководит процессом калибровки вышеописанного состояния по умолчанию (соответствующего части калибровки в пункте 1 формулы) в S14.
То есть, в S14 биосигналы, соответствующие движущей силе, приложенной в качестве нагрузки приводными двигателями 20, 22, 24, 26, обнаруживаются из сигналов обнаружения поверхностного миоэлектрического потенциала, выводимого из каждого датчика 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала, а значения коррекции получаются на основе сигналов обнаружения. В S15 нагрузка увеличивается посредством увеличения напряжения, приложенного к двигателям, на одну ступень. Далее, в S16 определяется, достигла ли нагрузка предварительно определенного верхнего предельного значения. В случае, когда нагрузка не достигла верхнего предельного значения в S16, процедура возвращается к вышеописанному S14, чтобы повторить процессы S14-S16.
Кроме того, в случае, когда нагрузка достигла верхнего предельного значения в S16, параметр K', полученный вышеописанной калибровкой, устанавливается в S17.
В последующем S17 значение коррекции, соответствующее мышечной силе владельца 12, получено из калибровки в неподвижном состоянии (как на фиг.12, показывающей владельца 12, носящего носимое устройство 18 помощи движению). То есть, в S15 параметр K получается так, что значение поверхностного миоэлектрического потенциала становится 1 в случае, когда владелец 12 генерирует силу в 1 Нм, в неподвижном сидячем состоянии с его/ее коленными суставами, согнутыми примерно на 90 градусов. В этой калибровке в первый раз владелец 12 генерирует мышечную силу, противостоящую движущей силе (вращающему моменту τm), приложенной в качестве нагрузки (входного вращающего момента) приводными двигателями 20, 22, 24, 26.
Соответственно, посредством того, что каждый датчик миоэлектрического потенциала должен обнаруживать биосигналы, сгенерированные относительно движущей силы, приложенной приводным источником, и генерируя параметр для процесса вычисления на основе обнаруженных сигналов, параметр устанавливается в базу 148 данных как присущее владельцу значение коррекции.
Таким образом, на основе соответствующего взаимоотношения между биосигналами и энергией, сгенерированной в процессе предварительно определенного базового движения владельца 12 (второе соответствующее взаимоотношение), помогающая энергия может быть скорректирована в соответствии с биосигналами всякий раз, когда носимое устройство 18 помощи движению носится владельцем 12 таким образом, что соответствующее взаимоотношение между биосигналами и энергией, сгенерированной владельцем 12 (первое соответствующее взаимоотношение), удовлетворяется.
Затем устройство переходит в нормальный режим управления для руководства процессом управления движущей силой в S18. Затем обычный режим управления продолжается до тех пор, пока переключатель электропитания не выключается на этапе 19.
Кроме того, в случае, когда операция включения переключателя электропитания выполняется второй раз или более в S12, устройство переходит в вышеописанный режим реконфигурирования в S20. Затем в S21 проводится калибровка установки значения коррекции (соответствующая части калибровки в пункте 1 формулы) для одного движения (единственного движения) владельца 12, и значение коррекции (параметр K') устанавливается в соответствии с мышечной силой владельца 12, полученной из движения калибровки (как показано на фиг.16). Затем проводятся процессы вышеописанных S17-S19.
Однако необходимо отметить, что этот вариант осуществления не ограничен проведением калибровки для одного движения после второго раза или далее. Калибровка установки значения коррекции может быть выполнена после второго раза или далее тем же образом, что и в неподвижном состоянии в первый раз.
Далее описывается процесс управления для каждого режима установки значения коррекции со ссылкой на фиг.21-23.
Фиг.21 - это блок-схема, показывающая процедуру управления калибровкой в первый раз, которая выполняется по умолчанию. Необходимо отметить, что в случае калибровки в первый раз вышеописанное значение коррекции устанавливается посредством того, что владелец 12 должен генерировать мышечную силу для сохранения неподвижного сидячего движения относительно нагрузки от двигателя.
Как показано на фиг.21, управляющее устройство 100 предоставляет движущую силу (входной вращающий момент) в качестве нагрузки, прилагая предварительно определенный ток возбуждения к приводным двигателям 20, 22, 24, 26 в соответствии с сидячим неподвижным состоянием владельца 12. Соответственно, владелец 12 генерирует мышечную силу в сидячем положении для противодействия движущей силе приводных электродвигателей 20, 22, 24, 26.
Затем в S32 сигналы миоэлектрического потенциала владельца 12 получаются от каждого датчика 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала. Затем в S33 на основе измеренных сигналов миоэлектрического потенциала виртуальный вращающий момент оценивается посредством вычисления.
Затем в S34 входной вращающий момент, приложенный в качестве нагрузки, сравнивается с вышеописанным виртуальным вращающим моментом. Затем в S35 вычисляется пропорция между входным вращающим моментом и виртуальным вращающим моментом. Затем в S36 параметр, соответствующий каждой фазе, сохраненный в вышеописанной базе 148 данных калибровки, считывается для умножения вышеописанной пропорции на этот параметр, чтобы, таким образом, получить значение коррекции (параметр коррекции) управляющих сигналов, приложенных к приводным двигателям 92-95. Затем в S37 параметр коррекции устанавливается в качестве параметра для автономного управления (соответствующего части установки значения коррекции в пункте 2 формулы).
Соответственно, владелец 12, носящий носимое устройство 18 помощи движению, может автоматически выполнять калибровку биосигналов в сидячем состоянии без необходимости каких-либо трудных процедур для выполнения калибровки, таких как прикрепление грузов в качестве нагрузки к владельцу или прикрепление цилиндрической пружины в качестве альтернативы грузам, которые требуются. Соответственно, время и усилие, требуемые для калибровки, могут быть значительно уменьшены. Это будет далее содействовать предложению устройства 10 помощи движению носимого типа в практическое использование и популяризации устройства 10 помощи движению носимого типа.
Кроме того, значение коррекции может быть установлено в соответствии с состоянием владельца 12, имеющего ослабленную мышечную силу, без приложения чрезмерной нагрузки на владельца 12 для выполнения калибровки. Это дает возможность значению коррекции быть установленным согласно состоянию владельца 12, а движущей силе быть точно приложенной к владельцу 12 вместе с движением владельца 12 на основе миоэлектрического потенциала владельца 12.
Следовательно, помогающая сила от приводного источника может быть приложена в соответствии с волей владельца 12 во время выполнения калибровки. Соответственно, движению владельца 12 может быть постоянно оказана помощь без приложения слишком большой или слишком малой помогающей силы. Таким образом, надежность устройства помощи движению носимого типа может быть далее улучшена.
В отдельности, владелец 12 может выполнить калибровку с легкостью даже в случае, когда манипуляция надетым носимым устройством 18 помощи движению предполагается затруднительной, например в случае, когда владелец 12 начинающий. Следовательно, даже в случае, когда владелец 12 имеет трудность в движении свободно (например, физически ослабленный человек), калибровка может быть выполнена при одновременном избежании трудности для движения владельца 12, и калибровка может быть выполнена до некоторой степени дополняющей физические неполноценности владельца.
Далее вышеописанная калибровка режима 1 реконфигурирования описывается со ссылкой на фиг.22.
Фиг.22 - это блок-схема, показывающая процедуру управления калибровкой реконфигурирования для одного движения (единственного движения). Необходимо отметить, что владелец 12 перемещает его/ее колени из согнутого состояния в распрямленное состояние один раз при сидячем положении в случае выполнения калибровки для одного движения. Кроме того, справочные миоэлектрические потенциалы, соответствующие движениям калибровки, сохранены в памяти 130.
Как показано на фиг.22, управляющее устройство 100 определяет, есть ли какие-либо сигналы обнаружения от датчиков 74, 76 угла коленных суставов в S41. В случае, когда датчики 74, 76 угла обнаруживают изменения угла соединения второго соединения 66 вместе с движением распрямления колена владельца 12 в сидячем состоянии (как показано на фиг.16), угол движения колена устанавливается на основе сигналов обнаружения от датчика 74, 76 угла в S42.
Затем в S43 справочный миоэлектрический потенциал, соответствующий углу движения колена, считывается из памяти 130. Затем в S44 измеренные значения миоэлектрического потенциала владельца 12 считываются с каждого датчика 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала. Затем в S45 сравниваются справочный миоэлектрический потенциал и измеренное значение миоэлектрического потенциала.
Затем в S46 вычисляется пропорция между справочным миоэлектрическим потенциалом и измеренным значением миоэлектрического потенциала. Затем в S47 значение коррекции (параметр коррекции) управляющего сигнала, подаваемого к приводам двигателей 92-95, вычисляется посредством считывания параметра, соответствующего углу движения колена, из базы данных 148 калибровки и умножения параметра на вышеописанную пропорцию. Затем в S48 параметр коррекции устанавливается в качестве параметра автономного управления (соответствующего части установки значения коррекции в пункте 2 формулы).
Соответственно, при калибровке во второй раз и далее параметр K' может быть скорректирован посредством движения колена в сидячем состоянии (одно движение) без использования движущей силы приводных двигателей 20, 22, 24, 26. Таким образом, физическая нагрузка владельца 12 может быть существенно уменьшена, а время, требуемое при подготовительной калибровке после одевания носимого устройства 18 помощи движению, может быть сокращено. Соответственно, калибровка во второй раз или более позволяет ходьбе начаться раньше.
Далее вышеописанная калибровка режима 2 реконфигурирования описывается со ссылкой на фиг.23. В режиме 2 реконфигурации владелец 12 выполняет эталонное движение вставания из сидячего состояния (фаза A1-A4) и затем возвращения в сидячее состояние (фаза A4-A1) (см. фиг.9).
Как показано на фиг.23, управляющее устройство 100 определяет, есть ли какие-либо сигналы обнаружения от датчиков 70, 72, 74, 76 угла носимого устройства 18 помощи движению в S51. В случае, когда датчики 70, 72, 74, 76 угла обнаруживают изменения угла соединения первого и второго соединения 64, 66 вместе с движением, показанным на фиг.9, эталонное движение владельца 12 устанавливается в S52 посредством выбора задачи, сохраненной в базе 148 данных калибровки согласно сигналам обнаружения от датчиков 70, 72, 74, 76 угла.
Затем справочные миоэлектрические потенциалы, соответствующие эталонным движениям первого и второго соединений 64, 66, считываются из памяти 130. Затем измеренные значения миоэлектрического потенциала владельца 12 считываются с каждого датчика 38a, 38b, 40a, 40b, 42a, 42b, 44a, 44b миоэлектрического потенциала в S54. Затем справочный миоэлектрический потенциал и измеренный миоэлектрический потенциал сравниваются в S55.
Затем пропорция между справочным миоэлектрическим потенциалом и измеренным значением миоэлектрического потенциала вычисляется в S56. Затем в S57 значение коррекции (параметр коррекции) управляющего сигнала, подаваемого к приводам двигателей 92-95, вычисляется посредством считывания параметра, соответствующего углу движения колена, из базы 148 данных калибровки и умножения параметра на вышеописанную пропорцию. Затем в S58 параметр коррекции устанавливается в качестве параметра автономного управления (соответствующего части установки значения коррекции в пункте 2 формулы).
Затем в S59 определяется, закончилась ли задача движения калибровки. В случае, когда есть оставшаяся фаза в S59, следующая фаза обновляется в S60, процессы вышеописанного S53 и последующие выполняются снова.
Кроме того, в случае, когда задача движения калибровки заканчивается, операция калибровки заканчивается.
Соответственно, при калибровке во второй раз и далее параметр K' может быть скорректирован без использования движущей силы приводных двигателей 20, 22, 24, 26. Таким образом, физическая нагрузка владельца 12 может быть существенно уменьшена, а время, требуемое при подготовительной калибровке после одевания носимого устройства 18 помощи движению, может быть сокращено.
Следовательно, подходящая для конкретного человека калибровка может быть выполнена, например, как калибровка выполнения поверхностного миоэлектрического потенциала согласно сгибающему и разгибающему движению владельца 12 или выполнение калибровки согласно эталонному движению, где владелец сгибает или распрямляет свои колени в сидячем состоянии. Соответственно, даже в случае, когда владелец 12 является физически ослабленным человеком, калибровка может быть выполнена согласно данному движению, которое может быть выполнено физически ослабленным человеком, или согласно эталонному движению других движений (задач).
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Необходимо отметить, что вышеописанный вариант осуществления не ограничивается вышеописанным примером устройства помощи движению, сконфигурированным, чтобы предоставлять помогающую силу ногам владельца 12. Например, настоящее изобретение может быть применено к устройству помощи движению, сконфигурированному, чтобы помогать движению рук.
Кроме того, несмотря на то что вышеописанный вариант осуществления описывает конфигурацию передачи вращающего момента электродвигателя в качестве помогающей силы, настоящее изобретение может быть применено к устройству, генерирующему помогающую силу посредством приводного источника, отличного от электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО, СПОСОБСТВУЮЩЕЕ РЕАБИЛИТАЦИИ | 2008 |
|
RU2427361C2 |
| НОСИМОЕ ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО, СОДЕЙСТВУЮЩЕЕ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ, И УПРАВЛЯЮЩАЯ ПРОГРАММА | 2005 |
|
RU2364385C2 |
| ОПОВЕЩЕНИЕ О ЗАБЫТОМ МОБИЛЬНОМ УСТРОЙСТВЕ | 2015 |
|
RU2704616C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| НАСТРАИВАЕМАЯ ОТЧЕТНОСТЬ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА | 2015 |
|
RU2735112C2 |
| НОСИМЫЙ НА УХЕ ПРИБОР ДЛЯ КОНТРОЛЯ СОДЕРЖАНИЯ КИСЛОРОДА | 2020 |
|
RU2824898C2 |
| ДВУХКОМПОНЕНТНЫЕ НОСИМЫЕ АБСОРБИРУЮЩИЕ ИЗДЕЛИЯ | 2010 |
|
RU2519957C2 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| СПОСОБ УПРАВЛЕНИЯ ОСВЕТИТЕЛЬНОЙ СИСТЕМОЙ, КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ, НОСИМОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И НАБОР ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ | 2015 |
|
RU2707183C2 |
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2006 |
|
RU2389469C2 |
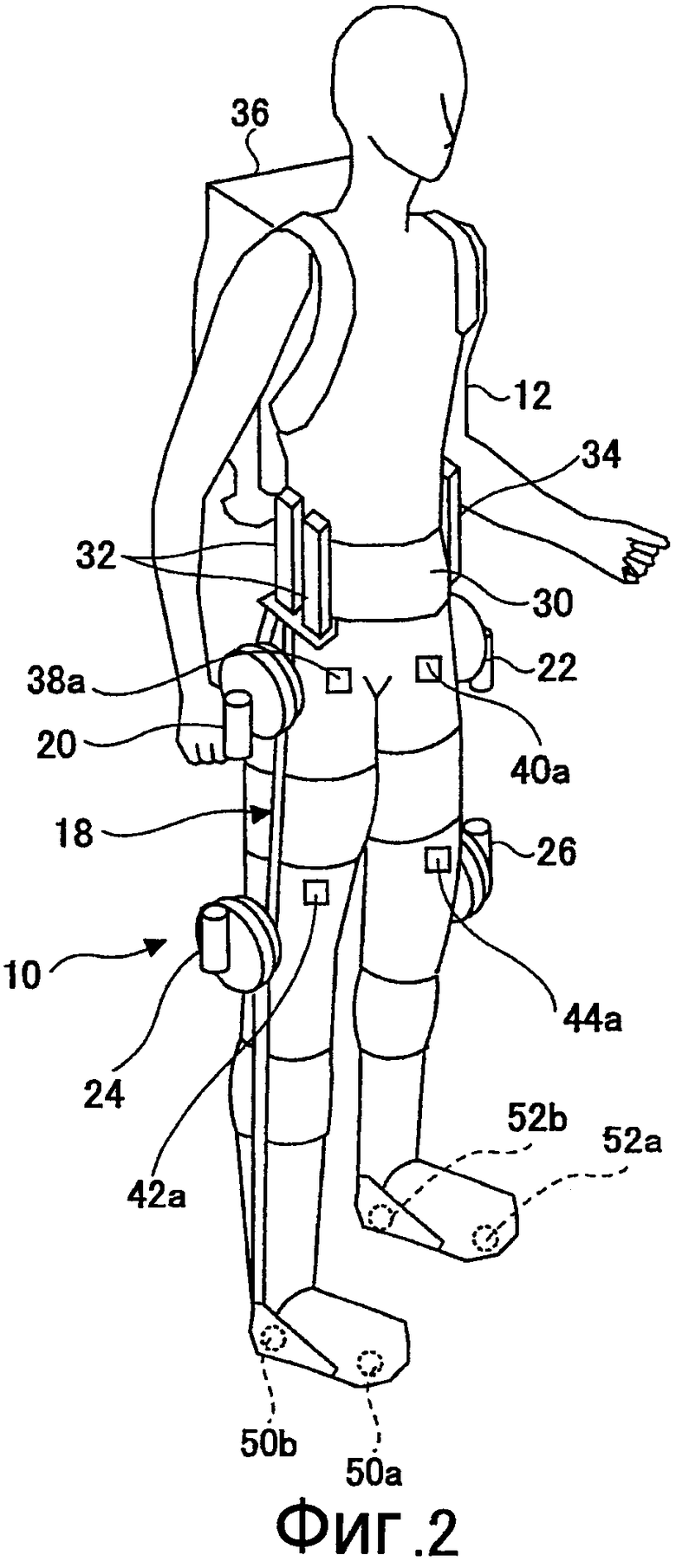
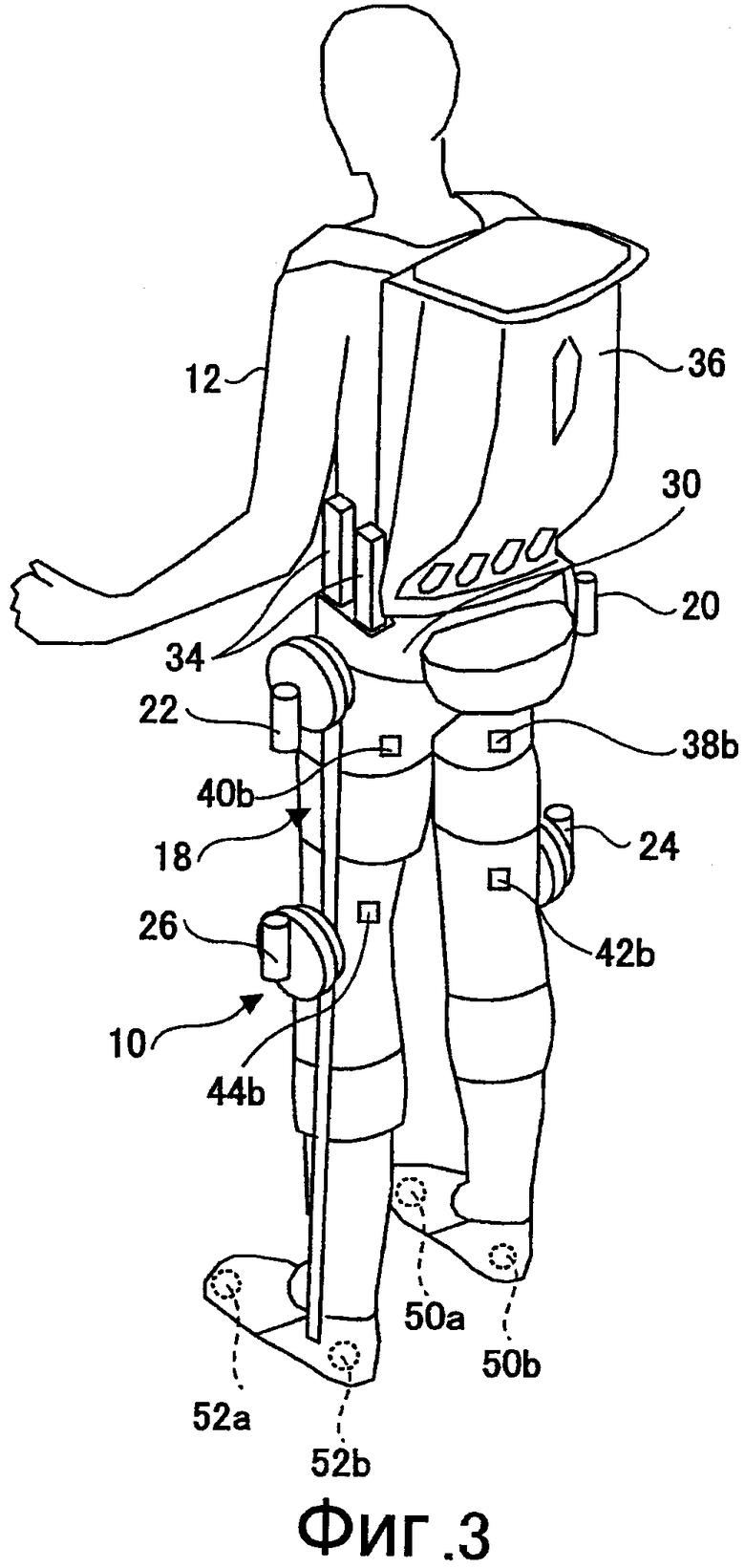
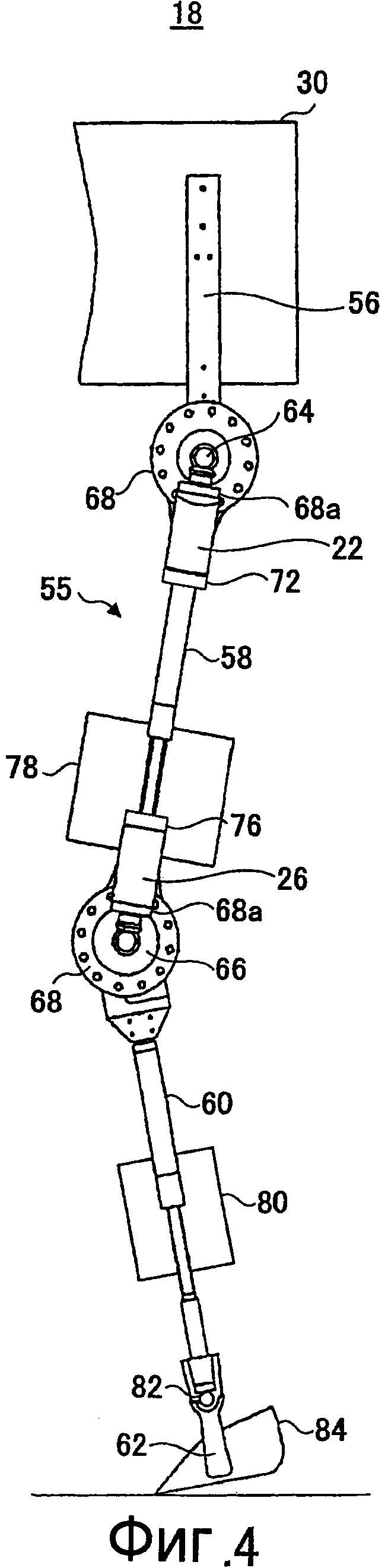
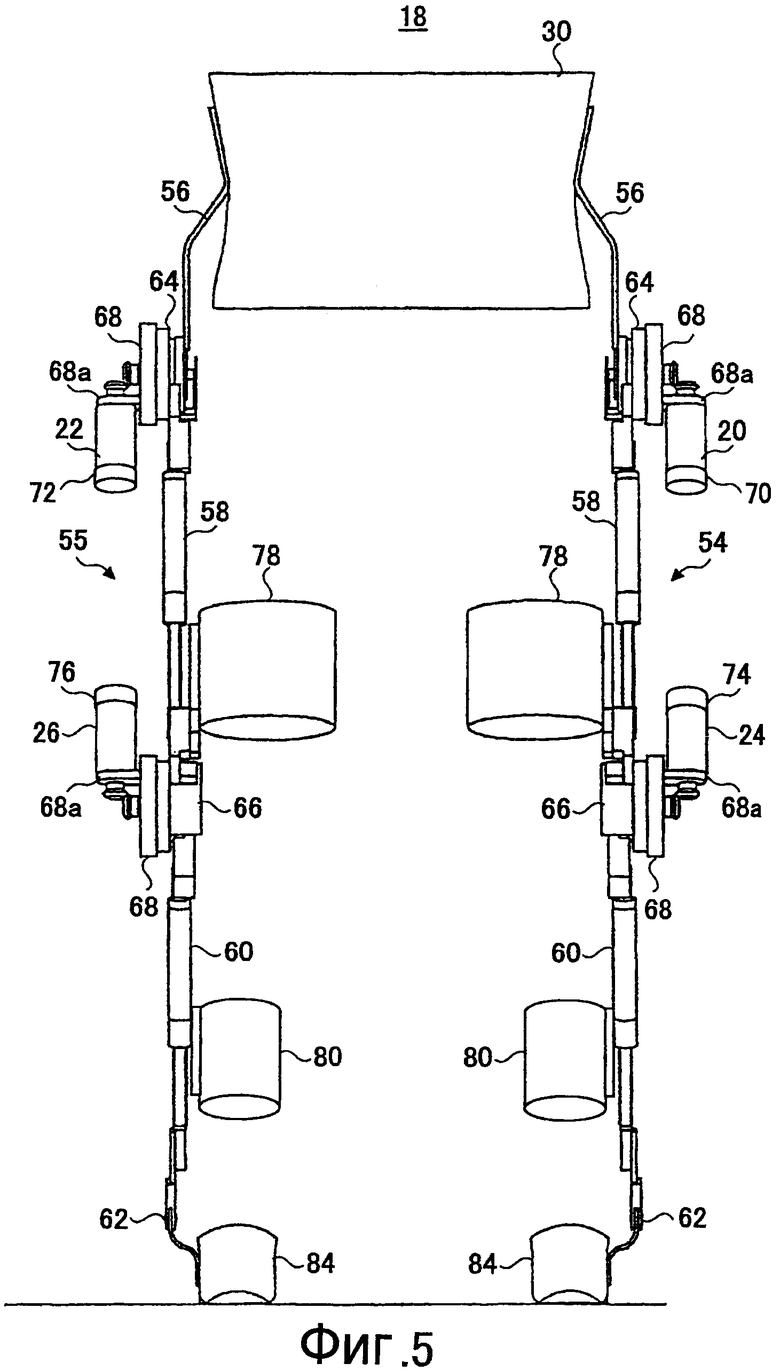
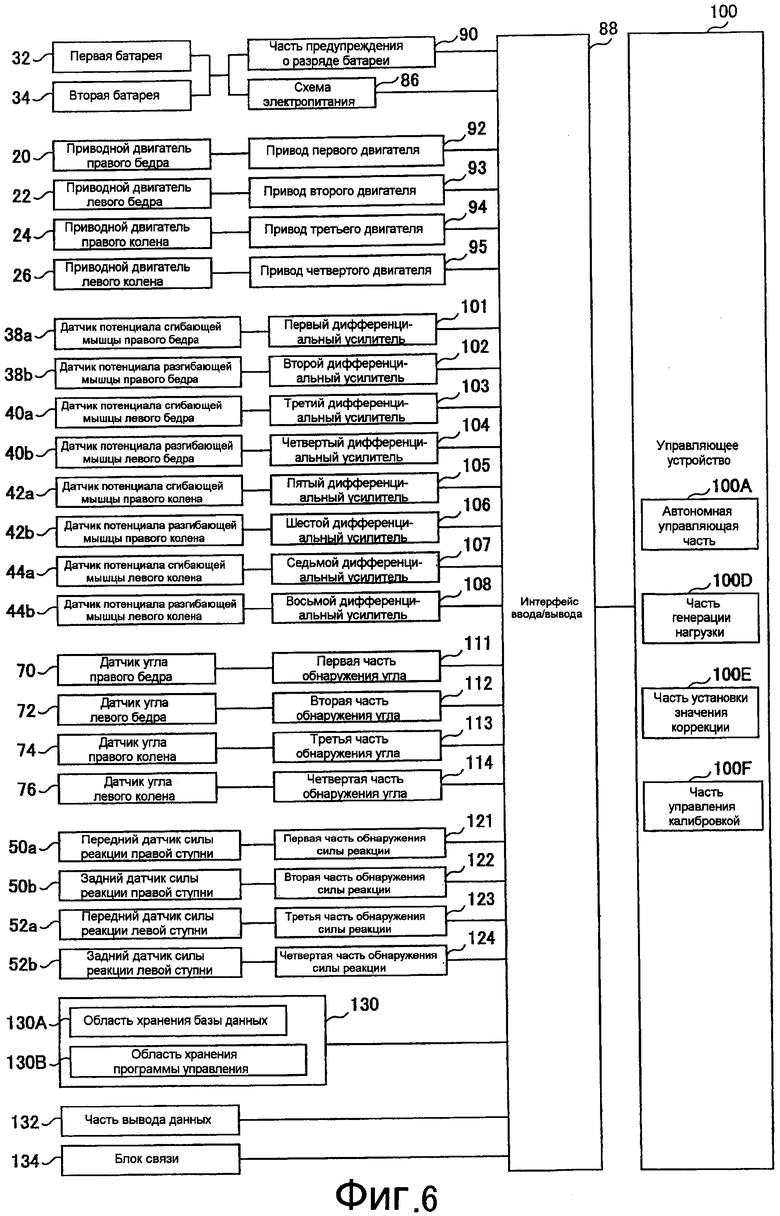
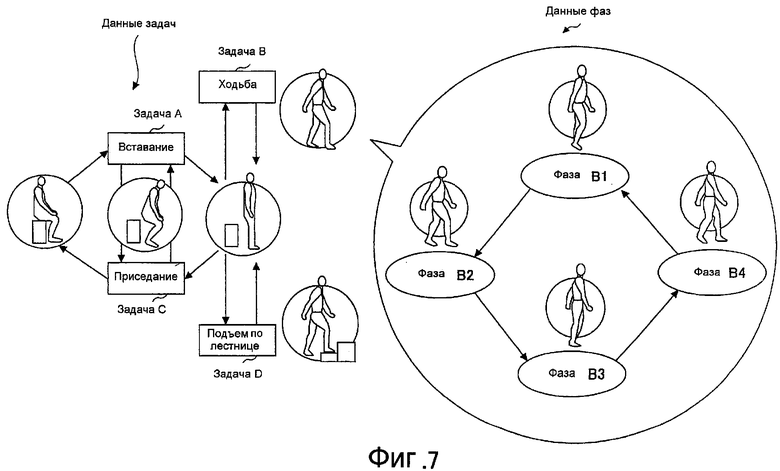
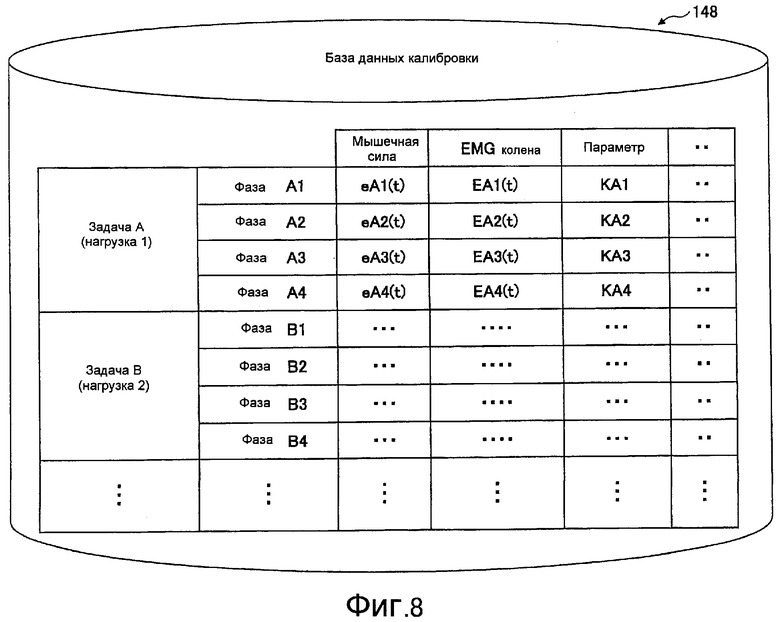
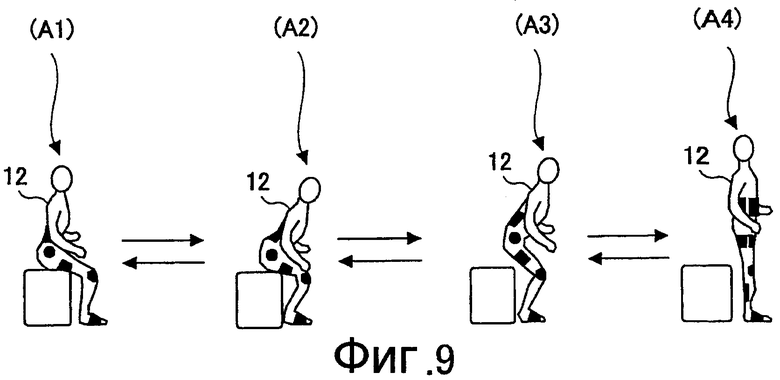
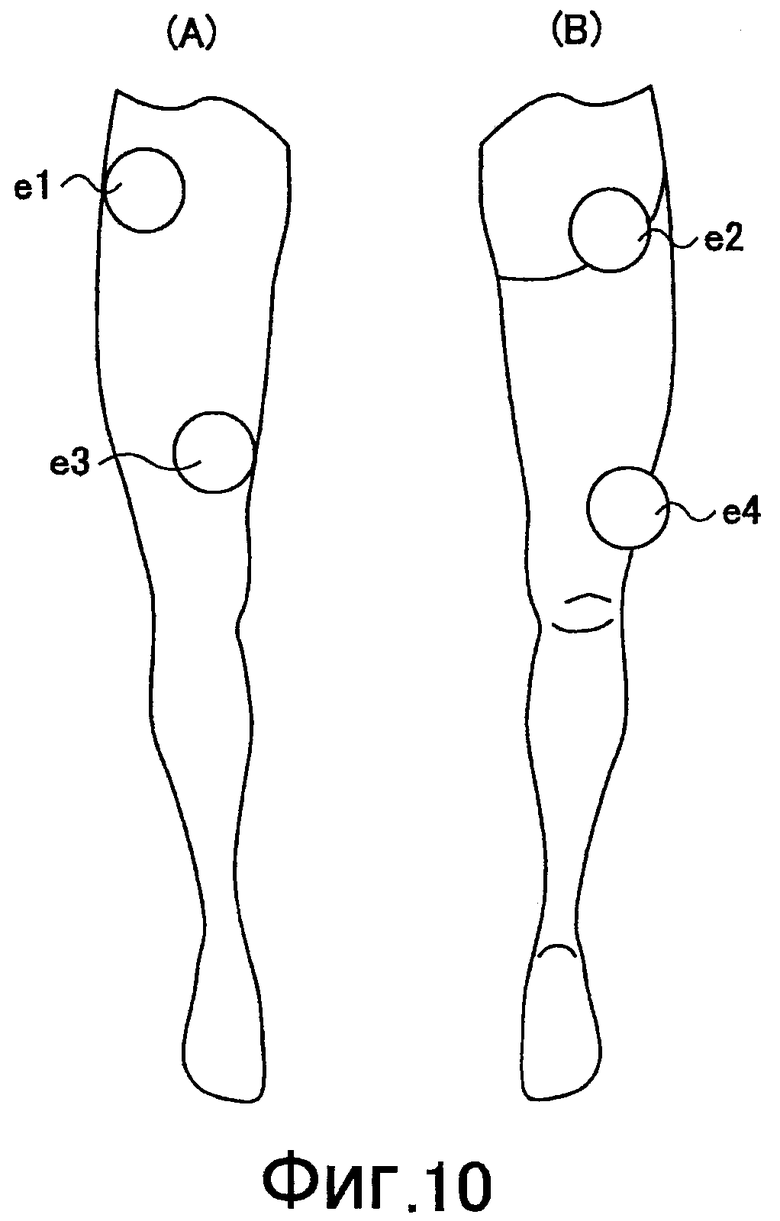
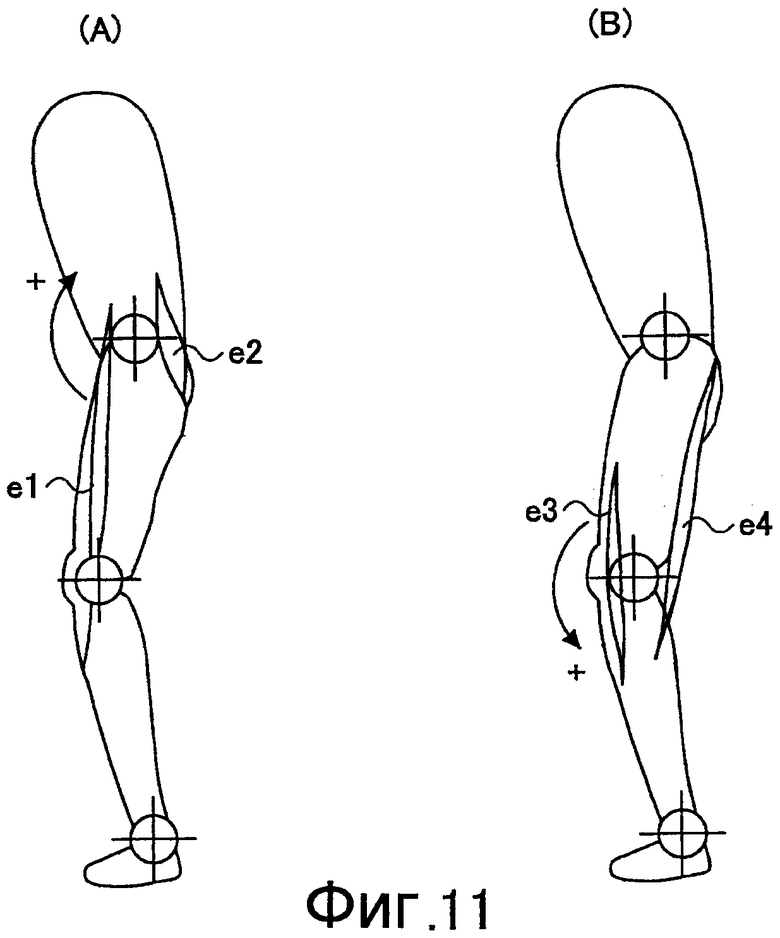
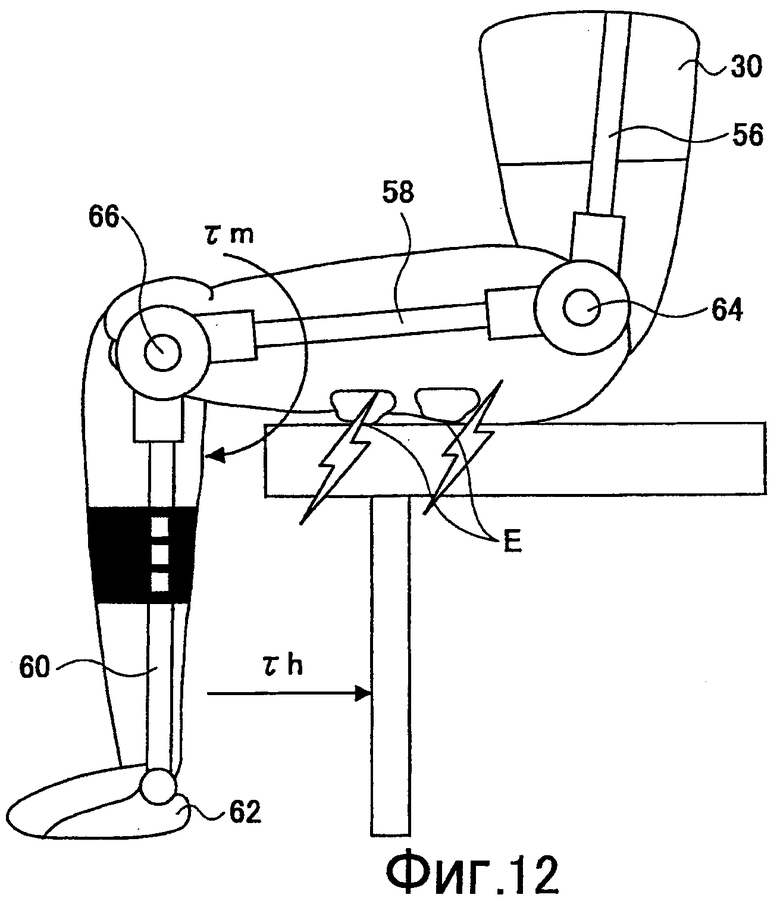
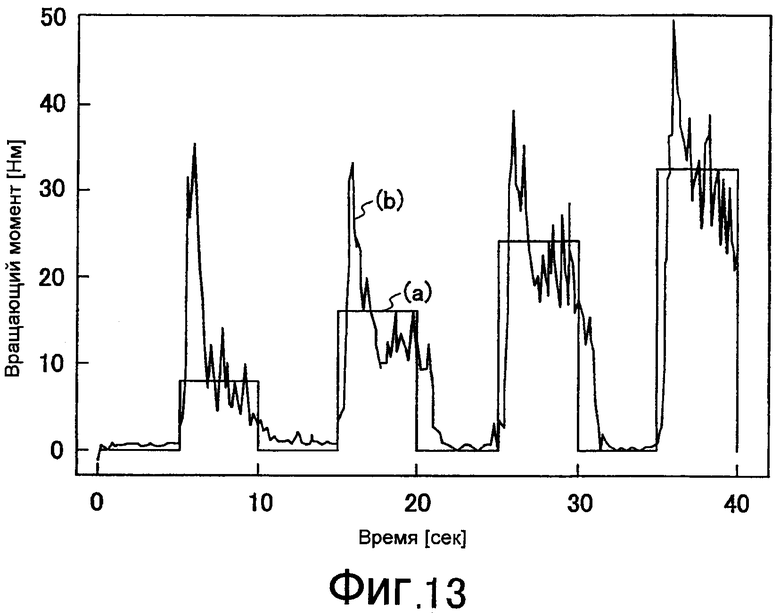
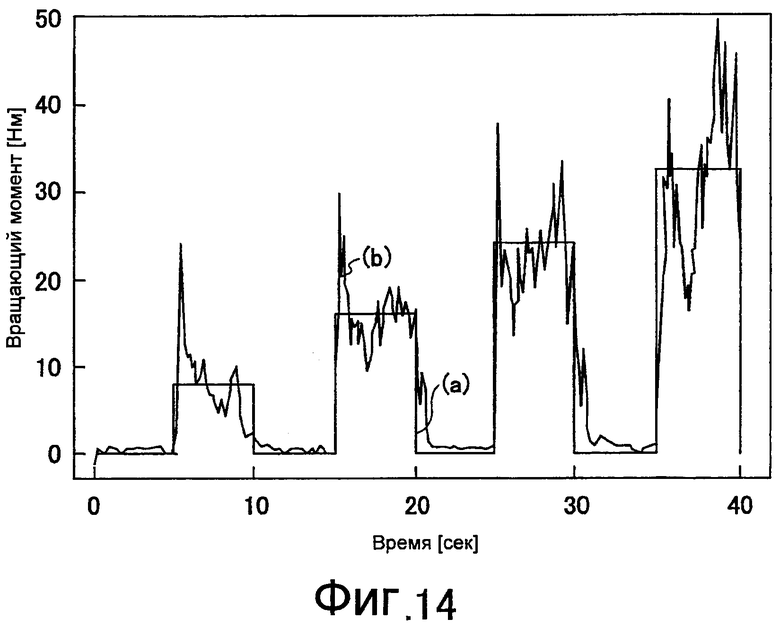
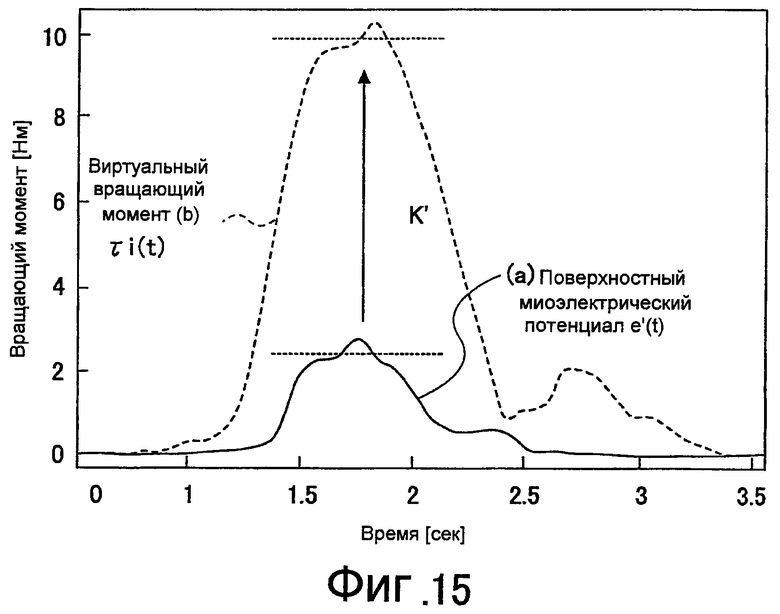
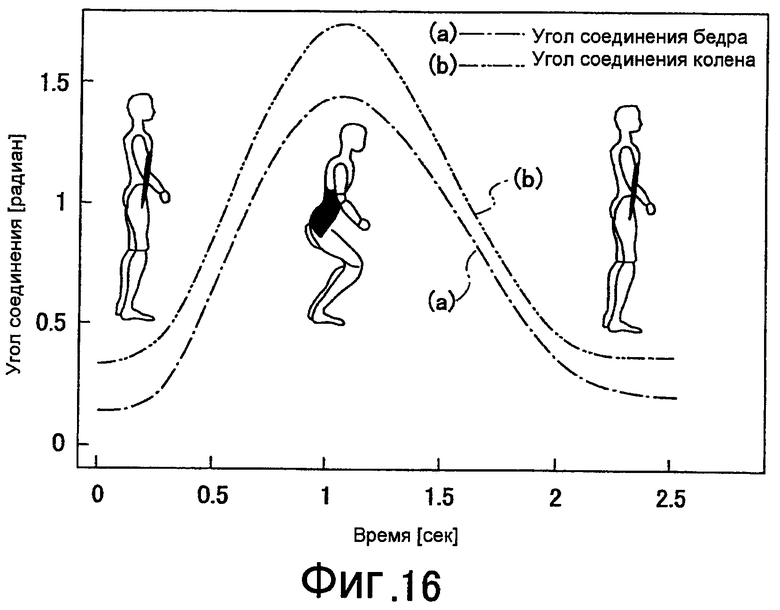
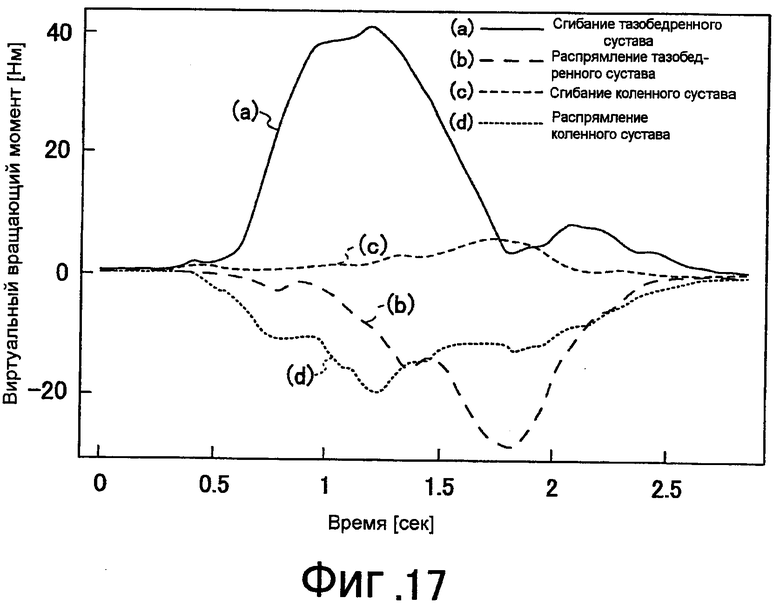
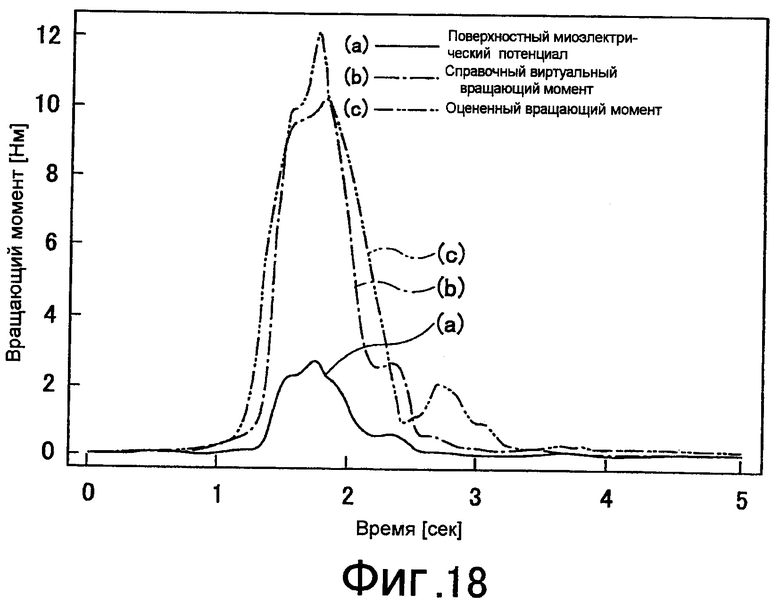
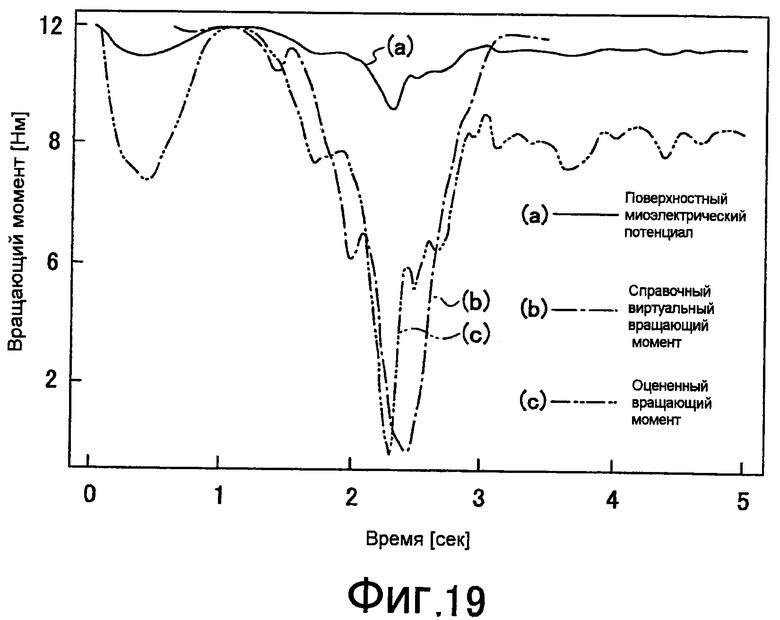
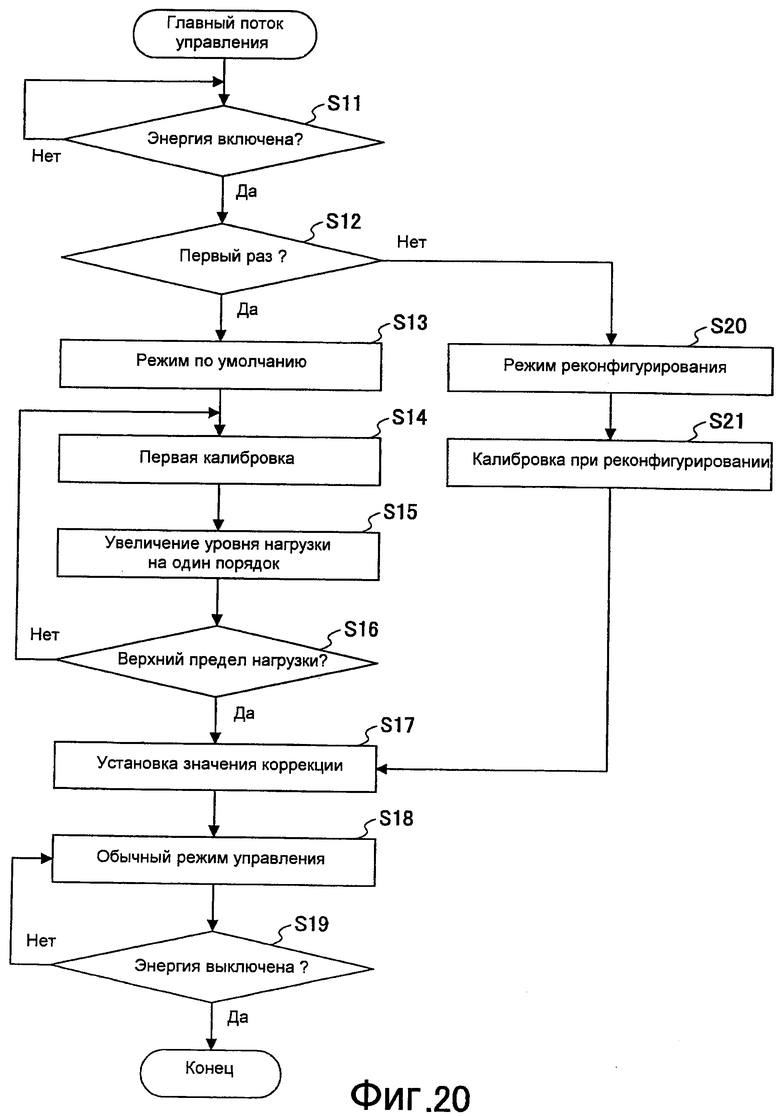
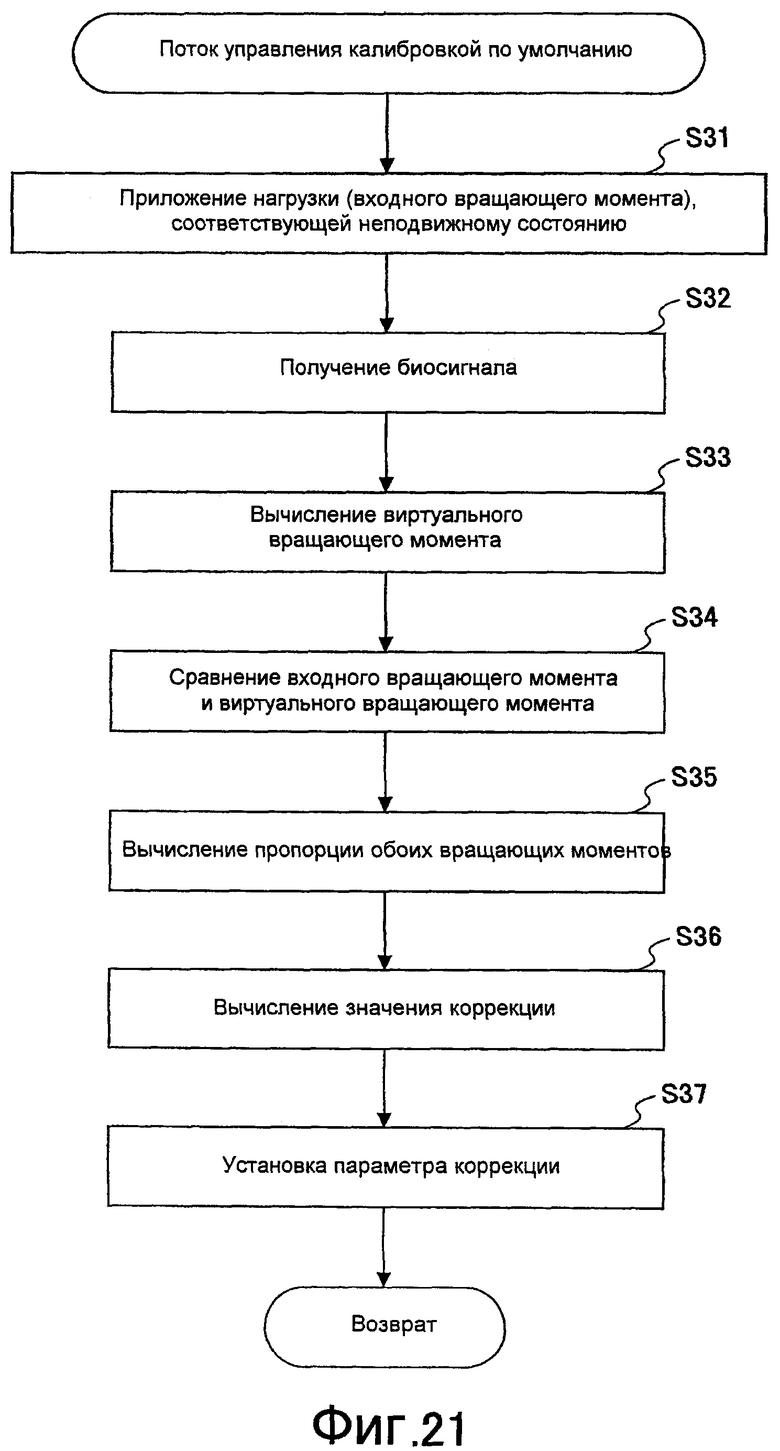
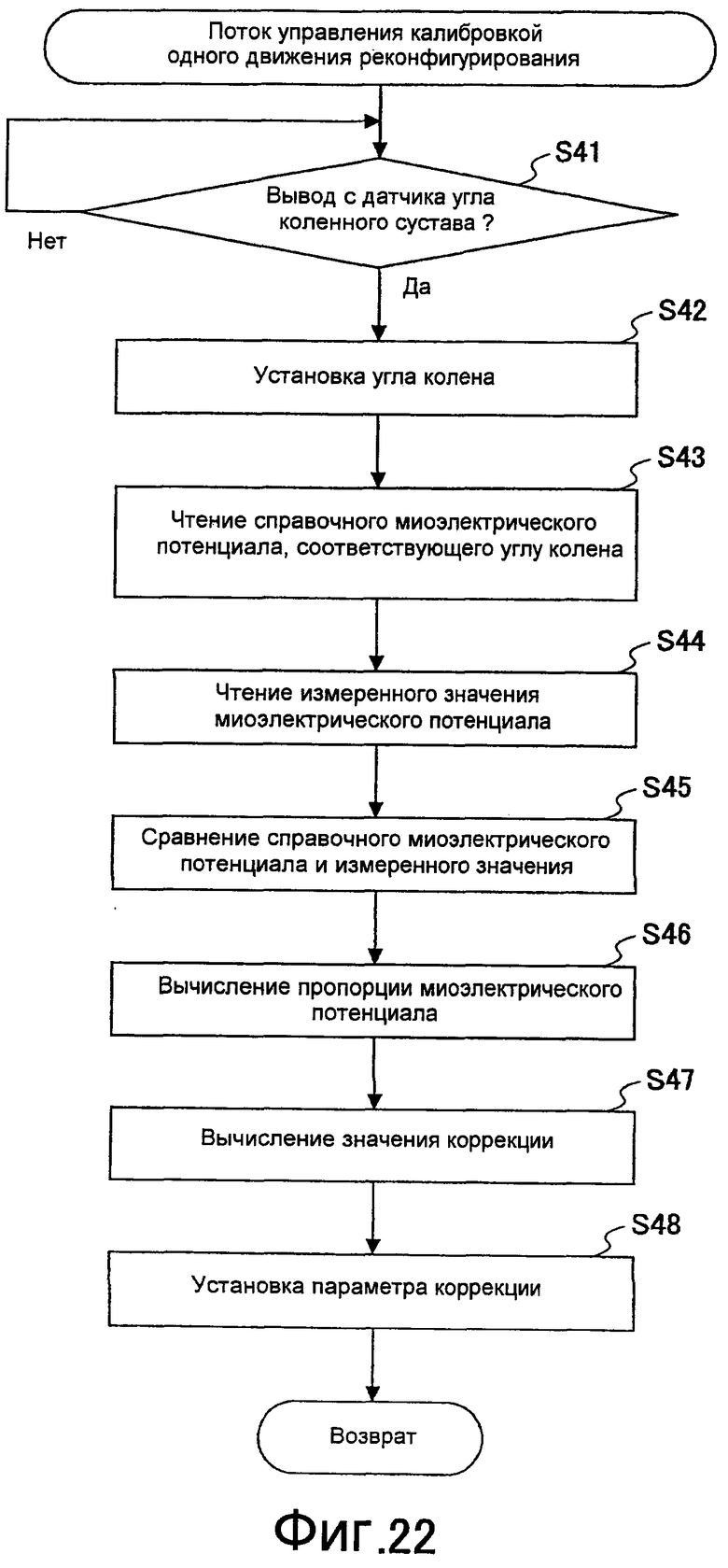
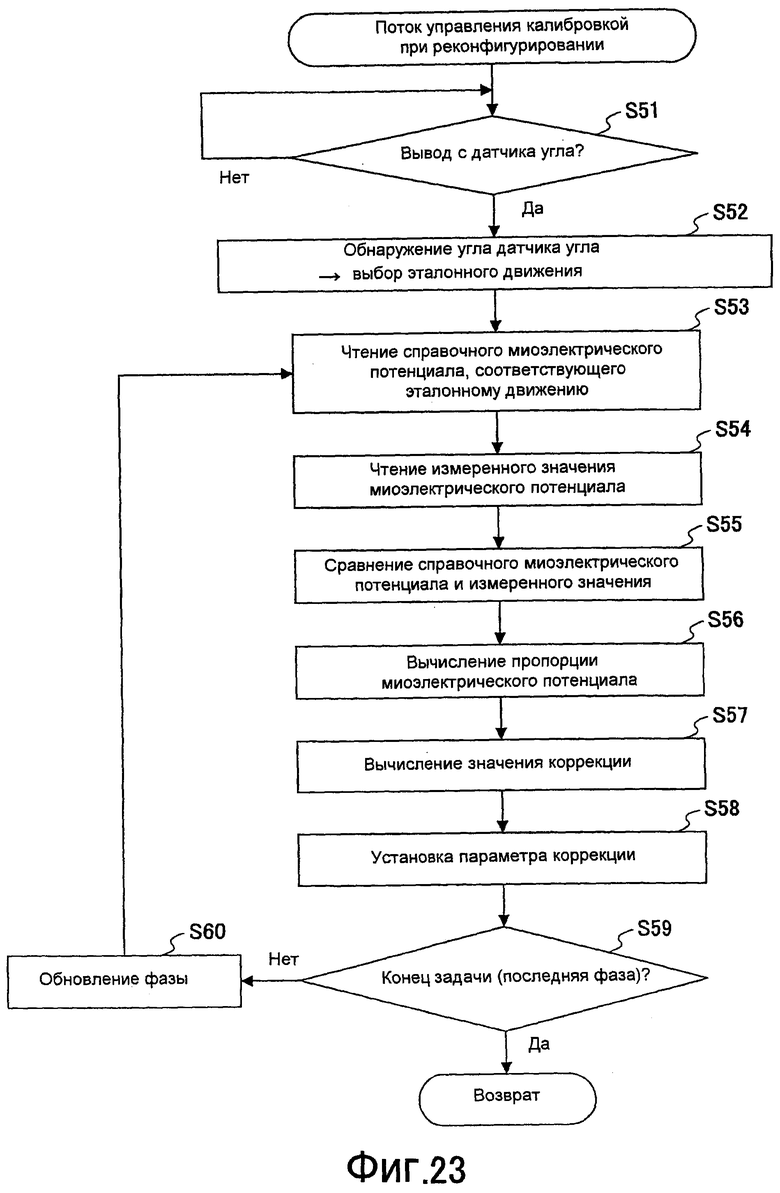
Изобретение относится к медицинской технике. Проблемой, которая должна быть решена настоящим изобретением, является уменьшение нагрузки, прикладываемой к носителю устройства посредством коррекции параметра в соответствии с обнаруживаемостью биосигналов. Чтобы решить эту проблему часть управления калибровкой устройства помощи движению дает возможность части усиления энергии приложить движущую силу приводного источника в качестве нагрузки (входной вращающий момент) от части генерации нагрузки к носителю устройства, когда носитель устройства носит носимое устройство помощи движению. Затем носитель устройства, к которому приложена движущая сила приводного источника, генерирует энергию скелетных мышц, выполняя предварительно определенную операцию калибровки. Соответственно, часть обнаружения физического явления обнаруживает угол соединения при операции калибровки, а часть обнаружения биосигналов обнаруживает миоэлектрические сигналы. В части коррекции параметров параметр К корректируется на основе разницы между нагрузкой (входным вращающим моментом) и движущей силой (мышечной силой), вычисляемой частью получения разницы относительно фазы, идентифицированной частью идентификации фазы. 4 н. и 12 з.п. ф-лы, 23 ил.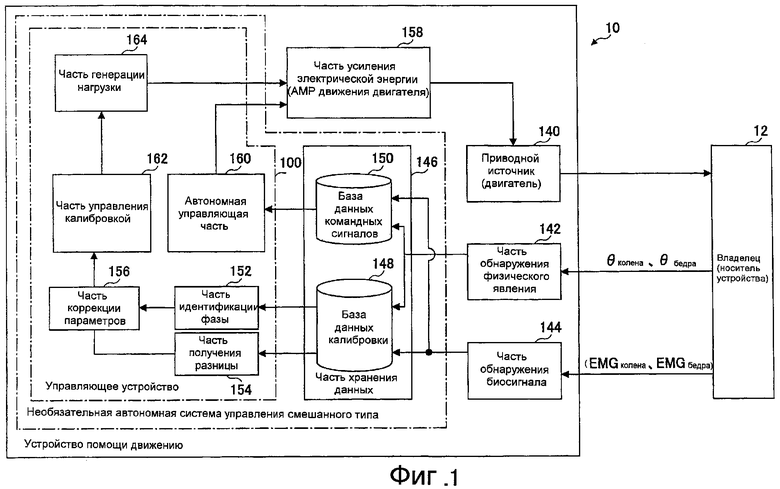
часть калибровки для обнаружения биосигнала, соответствующего движущей силе, приложенной в качестве нагрузки от приводного источника, и установки значения коррекции на основании обнаруженного сигнала.
причем управляющая часть корректирует управляющий сигнал, сохраненный в базе данных, согласно значению коррекции, установленному частью установки значения коррекции.
пояс талии,
часть помощи правой ноге, предусмотренную на правой стороне ниже пояса талии, и
часть помощи левой ноге, предусмотренную на левой стороне ниже пояса талии,
причем часть помощи правой ноге и часть помощи левой ноге включают в себя
первый каркас, проходящий вниз таким образом, чтобы поддерживать пояс талии,
второй каркас, проходящий вниз от первого каркаса,
третий каркас, проходящий вниз от второго каркаса,
четвертый каркас, на котором размещается нижняя сторона ступни носителя устройства, предусмотренный на нижнем конце третьего каркаса,
первое соединение, вставленное между нижним краем первого каркаса и верхним краем второго каркаса, и
второе соединение, вставленное между нижним краем второго каркаса и верхним краем третьего каркаса.
а упомянутое второе соединение предусмотрено на уровне, соответствующем высоте коленного сустава носителя устройства.
а во втором соединении предусматривается второй приводной источник для передачи движущей силы для вращения третьего каркаса.
часть генерации нагрузки для приложения заданной движущей силы от приводного источника в качестве внешней силы, когда носимое устройство помощи движению носится носителем устройства; и
часть установки значения коррекции для генерации параметра для процесса вычисления, выполняемого в соответствии с сигналом обнаружения управляющей частью, и установки упомянутого параметра в качестве значения коррекции для носителя устройства.
пояс талии,
часть помощи правой ноге, предусмотренную на правой стороне ниже пояса талии, и
часть помощи левой ноге, предусмотренную на левой стороне ниже пояса талии,
причем часть помощи правой ноге и часть помощи левой ноге включают в себя
первый каркас, проходящий вниз таким образом, чтобы поддерживать пояс талии,
второй каркас, проходящий вниз от первого каркаса,
третий каркас, проходящий вниз от второго каркаса,
четвертый каркас, на котором размещается нижняя сторона ступни носителя устройства, предусмотренный на нижнем конце третьего каркаса,
первое соединение, вставленное между нижним краем первого каркаса и верхним краем второго каркаса, и
второе соединение, вставленное между нижним краем второго каркаса и верхним краем третьего каркаса.
а упомянутое второе соединение предусмотрено на уровне, соответствующем высоте коленного сустава носителя устройства.
а во втором соединении предусматривается второй приводной источник для передачи движущей силы для вращения третьего каркаса.
первую часть хранения для хранения первого соответствующего взаимоотношения между энергией и биосигналами, генерируемыми носителем устройства, носящим носимое устройство помощи движению, и
вторую часть хранения для хранения второго соответствующего взаимоотношения между энергией и биосигналами, сгенерированными носителем устройства во время процесса выполнения заданного базового движения;
причем на основе биосигналов, сгенерированных во время базового движения носителя устройства, и второго соответствующего взаимоотношения выполняется коррекция помогающей энергии, соответствующей биосигналам, для удовлетворения первого соответствующего взаимоотношения всякий раз, когда носимое устройство помощи движению носится владельцем.
первую программу для того, чтобы дать возможность компьютеру сохранить первое соответствующее взаимоотношение между энергией и биосигналами, генерируемыми носителем устройства, носящим носимое устройство помощи движению, и сохранить второе соответствующее взаимоотношение между энергией и биосигналами, сгенерированными носителем устройства во время процесса выполнения заданного базового движения; и
вторую программу для того, чтобы дать возможность компьютеру выполнить коррекцию помогающей энергии, соответствующей биосигналам, на основе биосигналов, сгенерированных во время базового движения носителя устройства, и второго соответствующего взаимоотношения, сохраненного во второй части хранения, когда носимое устройство помощи движению носится носителем устройства, для удовлетворения первого соответствующего взаимоотношения, сохраненного в первой части хранения.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для коррекции движений в коленном суставе человека при ходьбе | 1975 |
|
SU571263A1 |

