Область техники, к которой относится изобретение
Данная группа изобретений относится к области измерения расстояний до объекта с помощью электромагнитных волн, а более конкретно к оптическим устройствам способам определения расстояний до объекта, когда генерируют тактовый сигнал, создают модуляцию указанного тактового сигнала, излучают на объект модулированный бинарный оптический сигнал, принимают посредством светочувствительного элемента отраженный оптический сигнал от объекта, преобразуют полученный отраженный сигнал из аналогового в цифровой, вычисляют корреляцию излученного и отраженного сигналов, вычисляют расстояние до определяемого объекта по временной задержке отраженного сигнала. Изобретение может быть использовано, например, в лазерной локации.
В данном описании используются следующие термины:
АЦП - аналого-цифровой преобразователь.
КМОП (комплементарная структура металл-оксид-полупроводник; англ. CMOS, complementary metal-oxide-semiconductor) - технология построения электронных схем. Отличительной особенностью схем КМОП по сравнению с биполярными технологиями является очень малое энергопотребление в статическом режиме (в большинстве случаев можно считать, что энергия потребляется только во время переключения состояний). КМОП-схемы обладают высокой скоростью действия и низким энергопотреблением.
ЛАДАР (LADAR) - лазерный локатор, сокращение от русского или английского варианта «лазерный радар», где радар от англ. radar (radio detection and ranging) - радиообнаружение и дальнометрия.
ЛИДАР (транслитерация LIDAR англ. Light Identification Detection and Ranging - световое обнаружение и определение дальности) - технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Обычно в России подобные устройства называются лазерными дальномерами.
Псевдослучайные (псевдошумовые) последовательности - это полностью детерминированные цифровые последовательности, которые внешнему наблюдателю кажутся случайными.
Мультиплексирование сигналов - уплотнение канала, т.е. передача нескольких потоков сигналов данных по одному каналу.
Демультиплексирование сигналов - обратная операция.
ВКФ - взаимнокорреляционная функция. Пример ВКФ:
 , где [0, Т] интервал интегрирования, причем длительность опорного сигнала y(t), как правило, существенно меньше Т.
, где [0, Т] интервал интегрирования, причем длительность опорного сигнала y(t), как правило, существенно меньше Т.
Это математическая операция, мера подобия 2-х сигналов (опорного и принимаемого), точка максимума корреляционной функции соответствует точке минимального квадратичного отклонения между сигналами.
Бинарная М-последовательность или бинарная последовательность максимальной длины (англ. Maximum length sequence, MLS) - псевдослучайная бинарная последовательность, порожденная регистром сдвига с линейной обратной связью и имеющая максимальный период N=pn-1, где n - целое натуральное число, большее 2, а p - простое число для случая бинарной последовательности, равное 2. Для бинарных М - последовательностей, записанных в алфавите «0; 1», число единиц всегда больше на единицу, чем число нулей. При переходе к алфавиту «-1; 1» заменяют нуль на единицу, а единицу - на минус единицу.
Уровень техники способа
Согласно первой из своих сторон, настоящее изобретение относится к способу определения расстояний до объекта.
Измерение расстояний до объектов производится путем отправления оптического сигнала, например лазерного излучения, получения отраженного сигнала, определения времени запаздывания и вычисления по нему расстояния.
Так, в патенте US 8537218, опубликован в 2013 г., описан способ определения расстояний до объекта по задержке времени, то есть определения расстояния от некогерентного источника излучения до ячейки приемной матрицы, основанный на измерении времени прохождения излученного импульса некогерентного излучения фиксированной длительности Т0, при этом импульс излучается периодически. Приемная матрица и излучатель расположены рядом. Метод измерения основан на том, что точное расстояние до поверхности объекта определяется как время прохождения излучаемого импульса до поверхности и отраженного от нее импульса до ячеек приемной матрицы (в иностранной патентной литературе обозначается как TOF - time of flight), умноженное на С/2 (С - скорость распространения электромагнитного излучения).
Способ определения TOF состоит в том, что априори известен интервал значений TOF=T1+dt, где dt может изменяться от Т1 до T1+Т0. Согласно патенту US 8537218, ячейка (пиксел) приемной матрицы содержит один элемент, генерирующий фототок (photo gate), и две структуры (КМОП/МДП), способные накапливать, удерживать и удалять заряд Q. Для определения dt в период времени [Т1, T1+Т0], под воздействием управляющих сигналов фоток поступает через transfer gate 1 на накопитель заряда Q1, а в период времени [T1+Т0, T1+2*Т0] поступает через transfer gate 2 на накопитель заряда Q2. Накопители зарядов выполняют функцию интеграторов фототока на отрезках Т0. Draining gates используются для быстрого удаления накопленных зарядов Q1 и Q2. Значения накопленных зарядов Q1 и Q2 используются для определения dt путем следующего вычисления:
dt=T0(Q2/(Q1+Q2)).
Данный метод, как правило, используется для определения расстояния до поверхности объектов в тех случаях, когда T1 меньше или, по крайней мере, кратно соразмерим по порядку с Т0 величины. В классификации, приведенной в справочнике «Handbook of 3D Machine Vision - Optical Metrology and Imaging» под редакцией Song Zhang, опубликованным в 2013 г., данный метод назван, как «Time-Dependent Charge Detection», что можно перевести, как определение заряда зависящего от времени пролета (TOF). Частота периодического накопления заряда Q в ячейках подобной приемной матрицы может достигать 10-20 МГц.
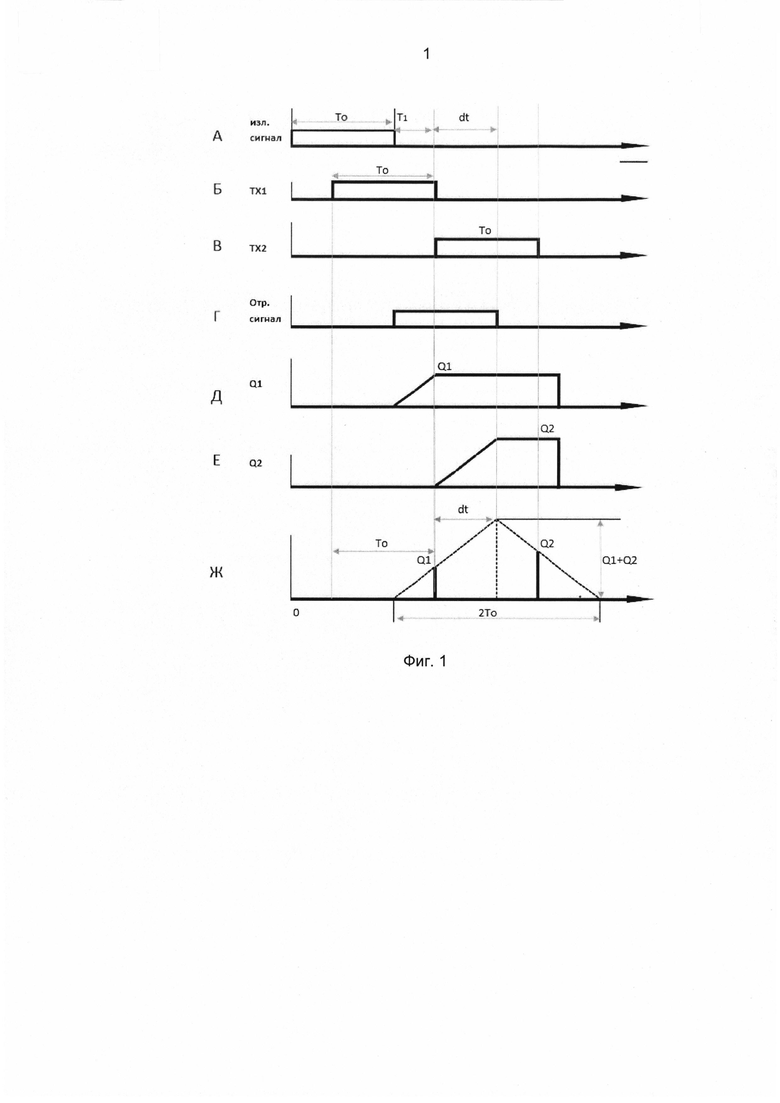
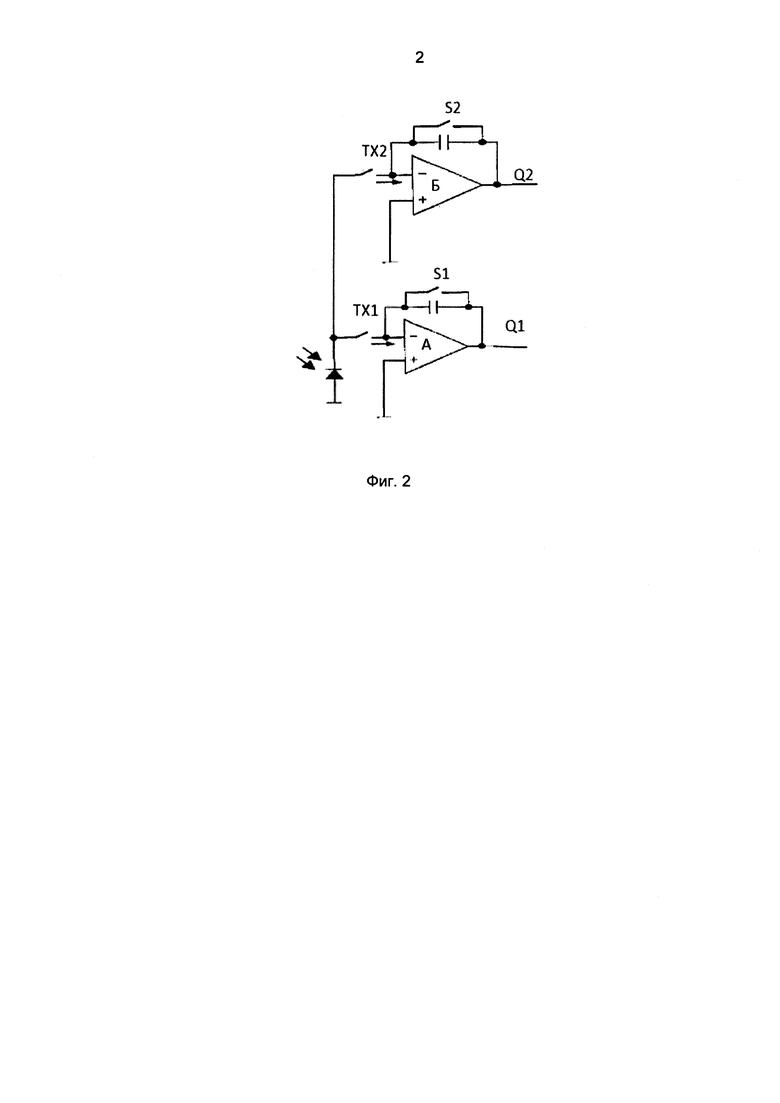
Для понимания сути метода приведем эквивалентную схему (блок интегрирования сигнала на интервалах времени Т0), реализующую функции пиксела/ячейки приемной матрицы и временные диаграммы, объясняющие реализуемый этой схемой способ.
На объект излучается зондирующий оптический сигнал (импульс) длительности Т0 (см. фигуру 1, график А).
Отраженный от объекта сигнал задержан на время T1+dt (см. фигуру 1, график Г).
Для определения dt используется следующий способ.
По стробимпульсу ТХ1 (см. фигуру 1, график Б) длительности Т0, задержанному относительно излученного сигнала (см. фигуру 1, график А) на время Т1, фототок подается на интегратор А (см. фигуру 2). По заднему фронту стробимпульса ТХ1 (см. фигуру 1, график Б) производится считывание дискретного отсчета Q1. Далее при помощи ключа S1 производится обнуление значения на интеграторе А (см. фигуру 2). Изменение сигнала на выходе интегратора А (см. фигуру 2) приведено на графике Д фигуры 1.
По стробимпульсу ТХ2 (см. фигуру 1, график В) длительности Т0, задержанному относительно излученного сигнала (см. фигуру 1, график А) на время T0+T1, фототок подается на интегратор Б (см. фигуру 2). По заднему фронту стробимпульса ТХ2 производится считывание дискретного отсчета Q2, далее при помощи ключа S2 производится обнуление значения на интеграторе Б (см. фигуру 2). Изменение сигнала на выходе интегратора Б приведено на графике Е фигуры 1.
Задержка отраженного принимаемого сигнала относительно зондирующего определяется как
Tзад=T1+dt,
где dt=T0*Q2/(Q1+Q2) или dt=Т0*(1-Q1/(Q1+Q2)).
На графике Ж фигуры 1 приведено графическое пояснение к способу определения dt.
На основе такого метода существуют способы и устройства, которые имеют следующие недостатки:
- малый динамический диапазон разрешаемых целей, ограниченный возможностью ячейки памяти накапливать заряд, что соответственно ограничивает и длительность излучаемого сигнала, и максимально определяемую дальность до объекта;
- неспособность работать в условиях засветки от сторонних источников излучения;
- очень малый диапазон (интервал) разрешаемых дальностей, равный Т0*С/2;
- малое значение начала диапазона (интервала) разрешаемых дальностей, равное T1*C/2, ограниченное тем, что мощность принимаемого сигнала уменьшается обратно 4-й степени от дальности до объекта или TOF;
- влияние наведенных помех, связанных с переключением ключей, коммутирующих фототок на результаты измерения Q1 и Q2.
Данные недостатки решаются в сложных ЛИДАР и ЛАДАР системах. В них используют высокочастотную модуляцию излучаемых сигналов, но это существенным образом усложняет обработку сигналов. Фактически для каждой приемной ячейки нужен свой радиочастотный тракт.
Для увеличения измеряемой дальности также применяют и метод накопления - многократное зондирование цели. Некогерентное накопление позволяет, при условии статистической независимости шумовой составляющей в принимаемом сигнале, увеличить соотношение сигнал/шум в √N раз. N - количество зондирований в серии (объем накопления).
Для повышения измерения расстояний до объекта сигнал подается периодический, примером подобного способа определения дальности может служить, например, способ, описанный в патенте РФ №2359228, опубликован в 2009 г., или в международной патентной заявке WO/2005/006016, опубликованной в 2005 г.
Однако данный способ имеет недостаток, связанный с большим временем определения дальности, и связанный с тем, что время накопления сигнала кратно времени рекуррентного периода посылки зондирующих импульсов, длительность которого равна максимальной разрешаемой дальности Rmax, умноженной на 2/С. Так, для Rmax=10 км при накоплении сигнала за 200 рекуррентных периодов потребуется 13,4 мс.
Данный недостаток устраняется за счет использования в качестве зондирующих сигналов оптического диапазона, модулированного М-последовательностью. Это позволяет при той же мощности оптического передатчика и длительности рекуррентного периода увеличить энергию зондирующего сигнала в (N+1)/2, где N - период М-последовательности.
Так, в патенте US 6753950, опубликован в 2004 году, описан способ определения дальности до объекта, включающий в себя следующие этапы, при которых:
- генерируют тактовый сигнал,
- создают модуляцию указанного тактового сигнала,
- излучают на объект модулированный бинарный оптический сигнал,
- принимают посредством светочувствительного элемента отраженный оптический сигнал от объекта,
- преобразуют полученный отраженный сигнал из аналогового в цифровой,
- вычисляют корреляцию излученного и отраженного сигналов,
- вычисляют расстояние до определяемого объекта по временной задержке отраженного сигнала.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Недостатком этого прототипа является то, что для повышения точности определения дальности до объекта, путем нахождения временного положения максимума взаимной корреляции, используется повышенная частота квантования времени на дискреты, равная М/Т0, где Т0 - временной интервал одной позиции в последовательности максимальной длинны. Это приводит к существенному увеличению энергопотребления.
Это связано с тем, что:
- для повышения точности определения расстояния необходимо увеличивать тактовую частоту в М раз. При этом использование частот свыше 125 МГц, что опубликовано, например, в патенте US 7206062, опубликованном в 2007 году, приводит к необходимости использования дорогостоящих процессоров и АЦП с высокими показателями рассеиваемой мощности. В патенте предлагается для снижения рассеиваемой мощности на каждый АЦП использовать промежуточное устройство быстродействующей дискретно-аналоговой памяти с последующим мультиплексированием данных с устройства дискретно аналоговой памяти на АЦП преобразователь. В патенте US 7206062 указано, что для оцифровки сигнала с частотой 1 ГГц с использованием АЦП на 8-10 разрядов потребуются АЦП, рассеивающие 0.5-6 Вт на одно быстродействующее АЦП. Данное техническое решение приводит к увеличению времени обработки принимаемого сигнала.
Недостатками прототипа являются избыточность вычислений, так для вычисления одного отсчета корреляции для начального грубого определения дальности необходимо произвести N операций сложения. К тому же требуются еще дополнительные вычисления для точного определения положения корреляционного пика.
Другим недостатком является то, что описанный в прототипе способ обладает ограниченным диапазоном отношения амплитуд принимаемых сигналов, поскольку если принимаются два и более отраженных сигналов, то различить их после корреляционной обработки можно, только если отношение амплитуд принимаемых сигналов более чем ~2*√N, поскольку ограничено уровнем боковых лепестков ВКФ между псевдошумовым бинарным сигналом (например М-последовательности) в алфавите {0, 1} и того же сигнала в алфавите {-1, 1}.
Раскрытие изобретения как способа
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ определения расстояний до объекта, позволяющий, по меньшей мере, сгладить как минимум один из указанных выше недостатков, а именно: увеличение динамического диапазона по отраженным сигналам от объектов и снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули, что и является поставленной технический задачей.
Для достижения этой цели способ дополнительно содержит следующие этапы, при которых:
- создают по меньшей мере одну модуляцию в виде псевдошумовой последовательности, согласованной с каскадным вычислителем, выполненным с возможностью вычисления взаимнокорреляционной функции испускаемого и принимаемого сигналов,
- производят интегральное накопление отраженного сигнала, идущего с выхода светочувствительного элемента,
- производят мультиплексирование сигналов, идущих от различных М принимающих элементов, для чего подают сигналы в каскадный вычислитель через мультиплексор, обеспечивая возможность вычисления (обработки) одним каскадным вычислителем множества различных дискретных сигналов одновременно.
Благодаря данным выгодным характеристикам появляется возможность организовать иную схему определения дальности до цели, которая основана на возможности использования одного каскадного вычислителя для одновременной обработки множества различных, дискретных сигналов, идущих от различных приемных элементов, что значительно сокращает количество операций, снижает энергопотребление. Действительно, TOF матрицы обычно не позволяют работать с частотами выше 10-20 МГц. В то же время каскадный вычислитель может производить вычисления с использованием тактовой частоты от 1 ГГц и выше. Это и позволяет использовать один и тот же каскадный вычислитель для обработки сигналов от множества пикселов (отдельных элементов приемной матрицы) или различных псевдошумовых последовательностей.
Так, если необходимо параллельно производить вычисления с М каналов, то число тактов задержки во всех цифровых линиях задержки, используемых в каскадном вычислителе в каждом из каскадов, должно быть увеличено в М раз. Сигналы в каскадный вычислитель при этом подаются через мультиплексор. Это позволяет упростить обработку и сократить объем используемой для вычислений памяти, а также увеличить порог дальности и динамический диапазон по амплитудам отраженных сигналов от объектов.
Существует также вариант изобретения, в котором производят поочередное накопление сигналов, идущих с первого и второго выходов каскадного вычислителя, при этом для модуляции зондирующего сигнала используются псевдошумовые дополнительные последовательности.
Благодаря данной выгодной характеристике появляется возможность подавлять составляющую фоновой засветки в сигнале и увеличить динамический диапазон амплитуд принимаемых сигналов за счет взаимного полного (при отсутствии шумовой составляющей в обрабатываемом сигнале) или частичного подавления боковых лепестков ВКФ при суммировании отсчетов ВКФ с первого и второго выходов каскадного вычислителя в блоке накопления.
Существует, кроме того, вариант изобретения, в котором производят накопление сигнала, идущего на вход каскадного вычислителя.
Благодаря данной выгодной характеристике появляется возможность подавлять составляющую фоновой засветки в сигнале и увеличить динамический диапазон амплитуд принимаемых сигналов за счет снижения уровня боковых лепестков ВКФ накопленного сигнала и согласованной с ним последовательности, вычисляемой каскадным вычислителем, кратно сократить число арифметических операций, выполняемых каскадным вычислителем.
Существует еще один вариант изобретения, в котором производят демультиплексирование сигналов, идущих с выхода каскадного вычислителя или блока накопления.
Благодаря данной выгодной характеристике появляется возможность группировать обработанные отсчеты по их принадлежности к соответствующему приемному элементу или соответствующей обрабатываемой последовательности.
Существует вариант изобретения, в котором создают две различные модуляции в виде двух дополнительных псевдошумовых последовательностей, отличающихся только тем, что в одной из них позиции «0» заменены на позиции «1», а в другой позиции «0» заменены на «-1».
Благодаря данной выгодной характеристике появляется возможность подавлять постоянную составляющую в сигнале (background light), вычисляемом каскадным вычислителем, и увеличить динамический диапазон амплитуд принимаемых сигналов за счет снижения уровня боковых лепестков
Существует также вариант изобретения, в котором создают различные модуляции в виде дополнительных псевдошумовых последовательностей, количество которых кратно двум.
Благодаря данной выгодной характеристике появляется возможность полностью подавлять составляющую фоновой засветки в сигнале и увеличить динамический диапазон амплитуд принимаемых сигналов за счет взаимного полного (при отсутствии шумовой составляющей в обрабатываемом сигнале) или частичного подавления боковых лепестков ВКФ при суммировании отсчетов ВКФ с первого и второго выходов каскадного вычислителя в блоке накопления. Кроме того, применение различных псевдошумовых последовательностей, на каждом цикле зондирования, позволяет снизить помехи, создаваемые излучаемым зондирующим сигналом от иного источника.
Существует в дополнение вариант изобретения, в котором располагают чувствительные к электромагнитным волнам, в том числе и оптическому излучению, элементы детектирования отраженного сигнала на гиростабилизированной платформе.
Благодаря данной выгодной характеристике появляется возможность расширения использования предлагаемого решения для перемещающихся в пространстве аппаратов, в частности для беспилотных летательных аппаратов, которые могут использовать предлагаемое решение в качестве основы технического зрения.
Существует также вариант изобретения, в котором располагают перед входом оптического сигнала на светочувствительные элементы поляризационный фильтр.
Благодаря данной выгодной характеристике появляется возможность повышать соотношение с/ш и, следовательно, повышать точность измерений расстояний до отражающих объектов.
Совокупность существенных признаков предлагаемого изобретения как способа неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения. Кроме того, совокупность существенных признаков предлагаемого изобретения, как способа, неочевидна для специалиста, что позволяет сделать вывод о соответствии критерию «изобретательский уровень» для изобретения.
Уровень техники устройства
Другой своей стороной настоящее изобретение относится к оптическому устройству для определения расстояний до объекта.
В патенте US 6753950, опубликован в 2004 году, описано оптическое устройство для определения расстояний до объекта, включающее в себя:
- источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с первым выходом
- генератора создания модуляции, первый вход которого соединен с выходом
- генератора тактового сигнала,
- светочувствительный элемент детектирования отраженного оптического сигнала от объекта, выход которого соединен с первым входом
- модуля вычисления корреляции излученного и отраженного сигналов, содержащего аналогово-цифровой преобразователь,
- первый выход модуля вычисления корреляции излученного и отраженного сигналов соединен со входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, первый выход которого соединен с вторым входом генератора создания модуляции, а второй выход которого соединен с вторым входом модуля вычисления корреляции излученного и отраженного сигналов,
- второй выход генератора создания модуляции соединен с третьим входом модуля вычисления корреляции излученного и отраженного сигналов.
Данное устройство является наиболее близким по технической сути и достигаемому техническому результату и выбрано за прототип предлагаемого изобретения как устройства.
Недостатком этого прототипа является то, что для повышения точности определения дальности до объекта, путем нахождения временного положения максимума взаимной корреляции, используется повышенная частота квантования времени на дискреты, равная М/Т0, где Т0 - временной интервал одной позиции в последовательности максимальной длинны. Это приводит к существенному увеличению энергопотребления.
Это связано с тем, что:
- для повышения точности определения расстояния необходимо увеличивать тактовую частоту в М раз. При этом использование частот свыше 125 МГц, что опубликовано, например, в патенте US 7206062, опубликованном в 2007 году, приводит к необходимости использования дорогостоящих процессоров и АЦП с высокими показателями рассеиваемой мощности. В патенте предлагается для снижения рассеиваемой мощности на каждый АЦП использовать промежуточное устройство быстродействующей дискретно-аналоговой памяти с последующим мультиплексированием данных с устройства дискретно аналоговой памяти на АЦП преобразователь. В патенте US 7206062 указано, что для оцифровки сигнала с частотой 1 ГГц с использованием АЦП на 8-10 разрядов потребуются АЦП, рассеивающие 0.5-6 Вт на одно быстродействующее АЦП. Данное техническое решение приводит к увеличению времени обработки принимаемого сигнала.
Недостатком прототипа является избыточность вычислений, так для вычисления одного отсчета корреляции для начального грубого определения дальности необходимо произвести N операций сложения. К тому же требуются еще дополнительные вычисления для точного определения положения корреляционного пика.
Другим недостатком является то, что описанное в прототипе устройство обладает ограниченным диапазоном отношения амплитуд принимаемых сигналов, поскольку если устройством принимаются два и более отраженных сигналов, то различить их после корреляционной обработки можно, только если отношение амплитуд принимаемых сигналов более чем ~2*√N, поскольку ограничено уровнем боковых лепестков ВКФ между псевдошумового бинарного сигнала (например М-последовательности) в алфавите {0, 1} и того же сигнала в алфавите {-1, 1}.
Раскрытие изобретения как устройства
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить оптическое устройство определения расстояний до объекта, позволяющее, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить увеличение динамического диапазона по отраженным сигналам от объектов и снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули, что и является поставленной технический задачей.
Для достижения этой цели генератор создания модуляции выполнен в виде генератора по меньшей мере одной псевдошумовой последовательности, согласованной с каскадным вычислителем, выполненным с возможностью вычисления взаимнокорреляционной функции испускаемого и принимаемого сигналов. Выход светочувствительного элемента детектирования отраженного оптического сигнала от объекта соединен со входом модуля интегрирования, выход которого соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов. Модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит последовательно соединенные между собой мультиплексор и каскадный вычислитель.
Благодаря данным выгодным характеристикам появляется возможность организовать иную схему определения дальности до цели, которая основана на возможности использования одного каскадного вычислителя для одновременной обработки множества различных, дискретных сигналов, идущих или от различных светочувствительных элементов или от различных псевдошумовых последовательностей, что значительно сокращает количество операций, снижает энергопотребление. Действительно, TOF матрицы обычно не позволяют работать с частотами выше 10-20 МГц. В то же время каскадный вычислитель может производить вычисления с использованием тактовой частоты от 1 ГГц и выше. Это и позволяет использовать один и тот же каскадный вычислитель для обработки сигналов от множества пикселов (отдельных элементов приемной матрицы) или различные псевдошумовые последовательности.
Так если необходимо параллельно производить вычисления с М каналов, то число тактов задержки во всех цифровых линиях задержки, используемых в каскадном вычислителе в каждом из каскадов, должно быть увеличено в М раз. Сигналы в каскадный вычислитель при этом подаются через мультиплексор. Это позволяет упростить обработку и сократить объем используемой для вычислений памяти.
Существует также вариант изобретения, в котором модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит первый блок накопления, вход которого соединен с выходом каскадного вычислителя.
Благодаря данной выгодной характеристике появляется возможность подавлять составляющую фоновой засветки в сигнале и увеличить динамический диапазон амплитуд принимаемых сигналов за счет снижения уровня боковых лепестков ВКФ накопленного сигнала и согласованной с ним последовательности, вычисляемой каскадным вычислителем.
Существует также вариант изобретения, в котором модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит второй блок накопления, выход которого соединен со входом каскадного вычислителя, а вход которого соединен с выходом мультиплексора.
Благодаря данной выгодной характеристике появляется возможность подавлять составляющую фоновой засветки в сигнале и увеличить динамический диапазон амплитуд принимаемых сигналов за счет полного подавления боковых лепестков в результирующей последовательности, полученной накоплением последовательностей с вычислителя ВКФ.
Существует также вариант изобретения, в котором модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит демультиплексор, вход которого соединен с выходом первого блока накопления.
Благодаря данной выгодной характеристике появляется возможность разделять сигналы после каскадного вычислителя по их принадлежности к различным источникам.
Существует также вариант изобретения, в котором генератор создания модуляции выполнен в виде генератора двух дополнительных псевдошумовых последовательностей, согласованных с каскадным вычислителем.
Благодаря данной выгодной характеристике появляется возможность подавлять постоянную составляющую в сигнале, вычисляемом каскадным вычислителем, и увеличить динамический диапазон амплитуд принимаемых сигналов за счет снижения уровня боковых лепестков результирующей ВКФ на выходе вычислителя ВКФ.
Существует также вариант изобретения, в котором генератор создания модуляции выполнен в виде генератора дополнительных псевдошумовых последовательностей, количество которых кратно двум, согласованных с каскадным вычислителем.
Благодаря данной выгодной характеристике появляется возможность подавлять постоянную составляющую в сигнале, вычисляемом каскадным вычислителем, и увеличить динамический диапазон амплитуд принимаемых сигналов за счет полного подавления уровня боковых лепестков в результирующей последовательности полученной накоплением последовательностей с вычислителя ВКФ.
Существует также вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала расположен на гиростабилизированной платформе.
Благодаря данной выгодной характеристике появляется возможность расширения использования предлагаемого решения для перемещающихся в пространстве аппаратов, в частности для беспилотных летательных аппаратов, которые могут использовать предлагаемое решение в качестве основы технического зрения.
Существует также вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала имеет поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент.
Благодаря данной выгодной характеристике появляется возможность повышать соотношение сигнал/шум и, следовательно, повышать точность измерений расстояний до отражающих объектов.
Совокупность существенных признаков предлагаемого изобретения как устройства неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения. Кроме того, совокупность существенных признаков предлагаемого изобретения как устройства неочевидна для специалиста, что позволяет сделать вывод о соответствии критерию «изобретательский уровень» для изобретения.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
- фигура 1 изображает временные диаграммы, объясняющие реализуемый уровнем техники способ определения расстояния,
- фигура 2 изображает блок интегрирования сигнала на временных отрезках Т0 и формирования дискретных отсчетов Q, согласно уровню техники,
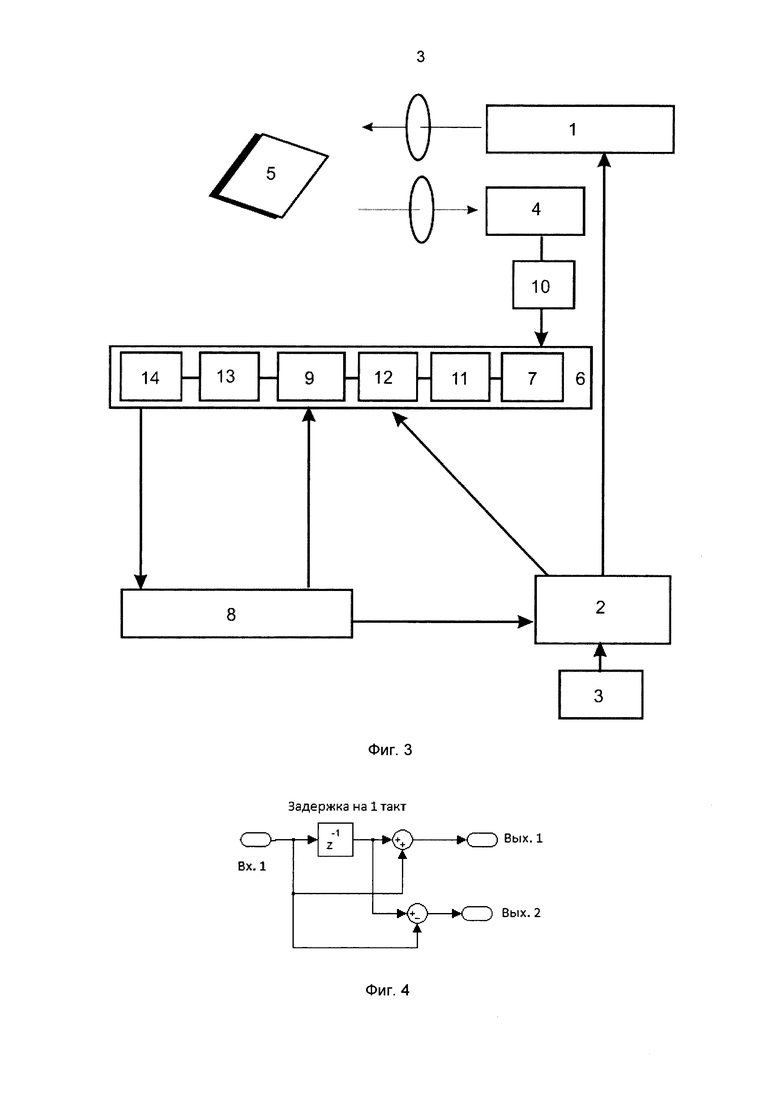
- фигура 3 изображает функциональную схему оптического устройства для определения расстояний до объекта, согласно изобретению,
- фигура 4 изображает устройство для генерации кодов d10, d11,
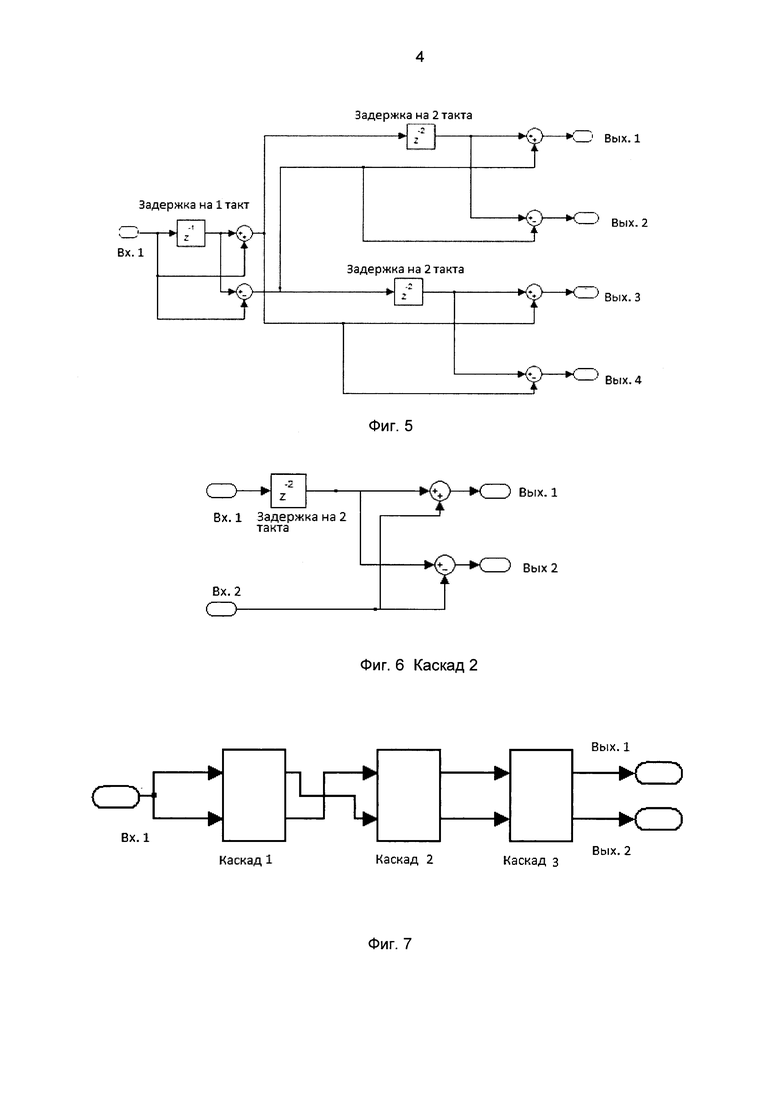
- фигура 5 изображает устройство для генерации кодов d20, d21, d22, d23,
- фигура 6 изображает схему каскада 2 каскадного вычислителя, отображенного на фигуре 7,
- фигура 7 изображает устройство, генерирующее две дополнительные D-последовательности,
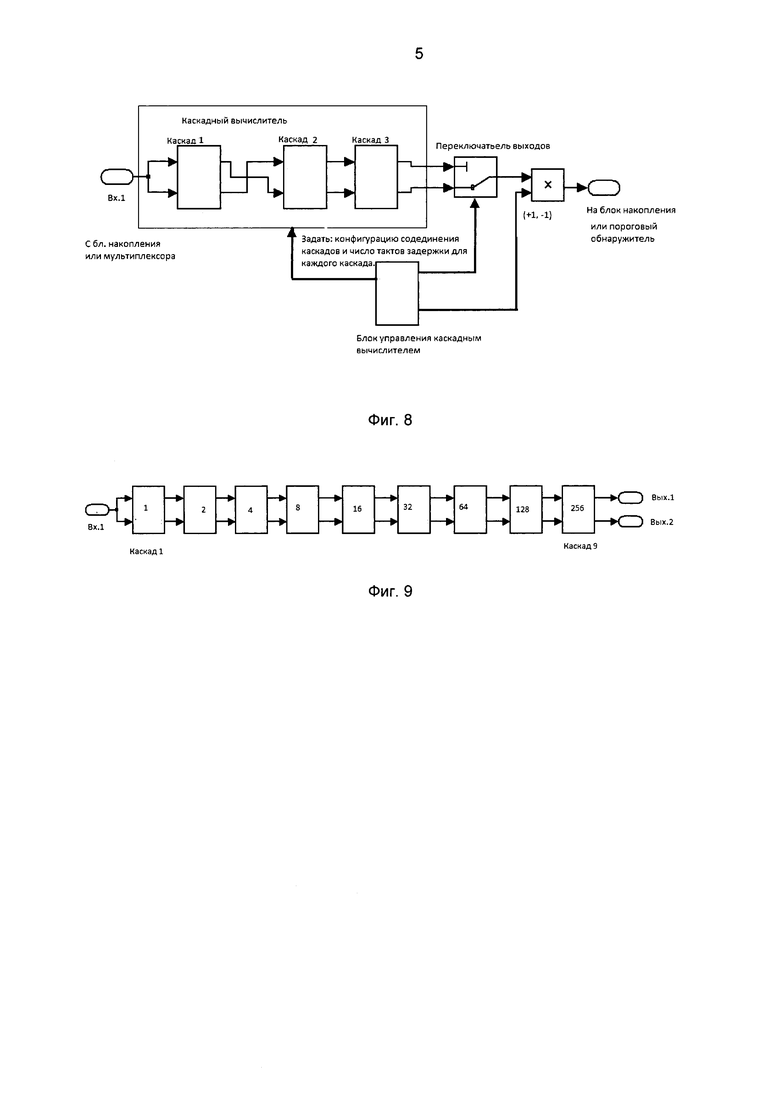
- фигура 8 изображает схему каскадного вычислителя ВКФ, позволяющую при помощи каскадного вычислителя осуществлять вычисление четырех указанных в таблице 3 ВКФ для их последующего суммирования,
- фигура 9 изображает схему каскадного вычислителя, состоящего из девяти каскадов,
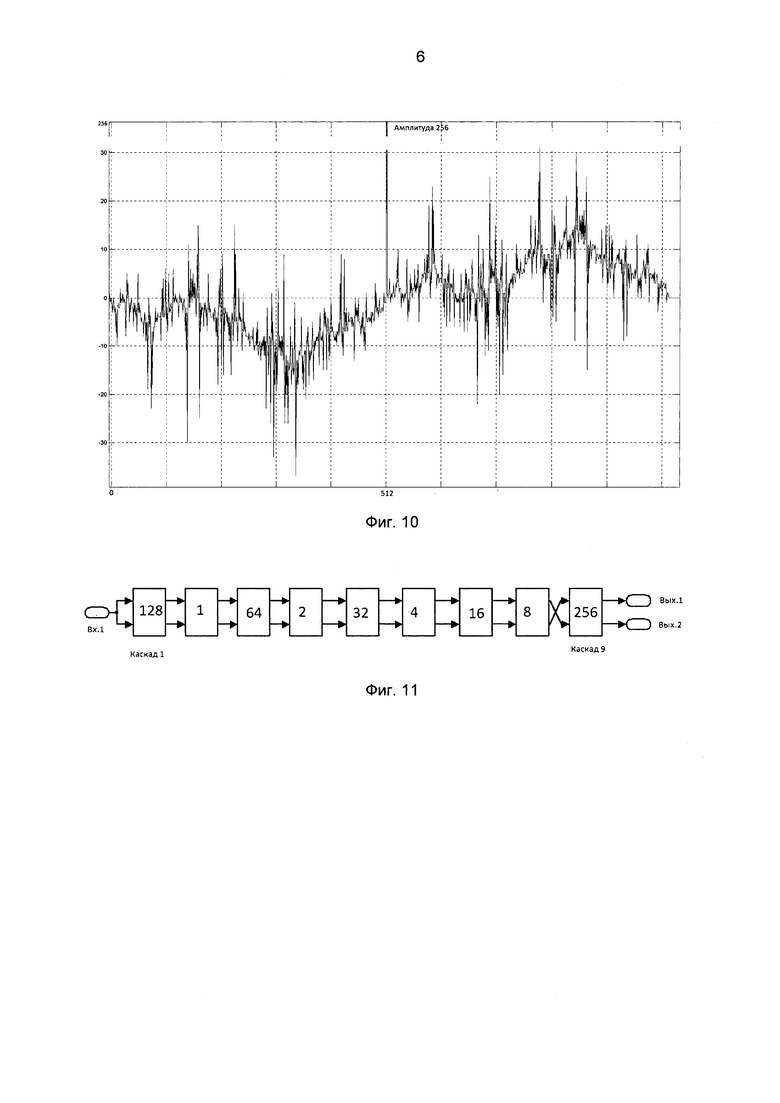
- фигура 10 изображает взаимнокорреляционную функцию,
- фигура 11 изображает схему каскадов, полученную путем перестановки и соединений между каскадами,
- фигура 12 изображает минимаксную взаимнокорреляционную функцию,
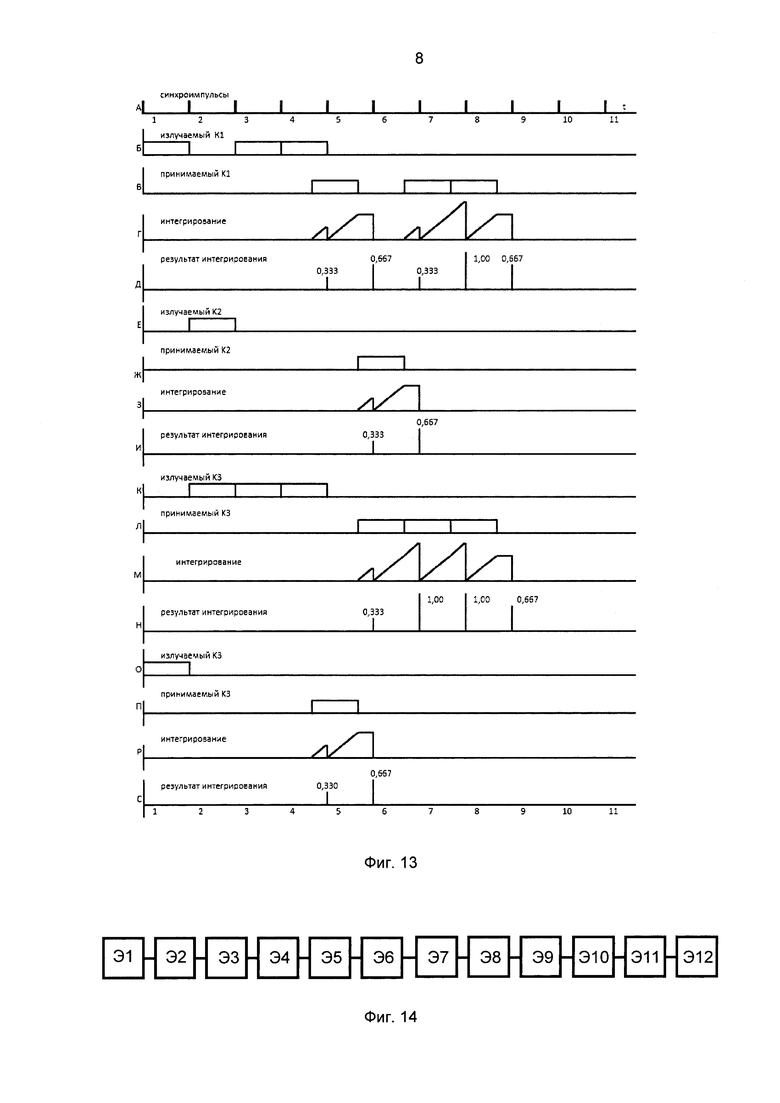
- фигура 13 изображает графики Б, Е, К, О, на которых отражены излучаемые сигналы, модулированные последовательностями К1, К2, К3, К4, и эти же сигналы, отраженные от объекта (графики В, Ж, Л, П), процесс интегрирования принимаемых сигналов на временных интервалах длительности Т0 (графики Г, З, М, Р), дискретные отсчеты, получаемые в результате интегрирования на интервалах, отражены соответственно на графиках Д, И, Н, С. На графике А отображены синхроимпульсы и их номера, подаваемые на генератор создания модуляции, отраженный на фигуре 3,
- фигура 14 показывает этапы работы устройства, согласно изобретению.
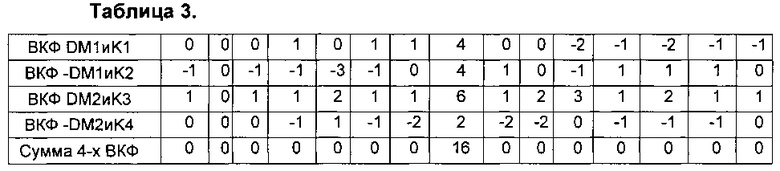
Согласно фигуре 3 оптическое устройство для определения расстояний до объекта включает в себя источник 1 излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с первым выходом генератора 2 создания модуляции, первый вход которого соединен с выходом генератора 3 тактового сигнала. Оптическое устройство для определения расстояний до объекта включает в себя также светочувствительный элемент 4 детектирования отраженного оптического сигнала от объекта 5, выход которого соединен с первым входом модуля 6 вычисления корреляции излученного и отраженного сигналов, содержащего аналогово-цифровой преобразователь 7. Первый выход модуля 6 вычисления корреляции излученного и отраженного сигналов соединен со входом модуля 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Первый выход модуля 8 соединен с вторым входом генератора 2 создания модуляции, а второй выход генератора 2 соединен с вторым входом модуля 6 вычисления корреляции излученного и отраженного сигналов. Второй выход модуля 8 соединен с третьим входом модуля вычисления корреляции излученного и отраженного сигналов.
Генератор 2 создания модуляции выполнен в виде генератора по меньшей мере одной псевдошумовой последовательности, согласованной с каскадным вычислителем 9. Выход светочувствительного элемента детектирования отраженного оптического сигнала от объекта соединен со входом модуля интегрирования 10, выход которого соединен с первым входом модуля 6 вычисления корреляции излученного и отраженного сигналов. Модуль 6 вычисления корреляции излученного и отраженного сигналов дополнительно содержит последовательно соединенные между собой мультиплексор 11 и каскадный вычислитель 9. (Модули 7 и 11 могут быть и поменяны местами, если мультиплексируется аналоговый сигнал и используется быстродействующее АЦП).
Модуль 6 вычисления корреляции излученного и отраженного сигналов дополнительно может содержать первый блок накопления 12, выход которого соединен со входом каскадного вычислителя ВКФ 9 (пример схемы каскадного вычислителя ВКФ представлен на фиг. 8), а вход которого соединен с выходом мультиплексора 11.
Модуль вычисления корреляции излученного и отраженного сигналов дополнительно может содержать второй блок накопления 13, вход которого соединен с выходом каскадного вычислителя.
Модуль 6 вычисления корреляции излученного и отраженного сигналов дополнительно может содержать демультиплексор 14, вход которого соединен с выходом первого блока накопления 12.
Генератор создания модуляции может быть выполнен в виде генератора двух дополнительных псевдошумовых последовательностей, согласованных с каскадным вычислителем 9.
Генератор создания модуляции может быть выполнен в виде генератора четырех дополнительных псевдошумовых последовательностей, согласованных с каскадным вычислителем 9.
Светочувствительный элемент детектирования отраженного оптического сигнала может быть расположен на гиростабилизированной платформе. На фигурах не показана.
Светочувствительный элемент детектирования отраженного оптического сигнала может иметь поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент. На фигурах не показан.
На фигуре 8 показан блок управления каскадным вычислителем, функции которого выполняет модуль 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, см. фиг 3.
Осуществление изобретения
Оптическое устройство для определения расстояний до объекта работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения. Согласно фигуре 14.
Этап Э1. Создают генератором 2 создания модуляции в виде бинарной псевдошумовой последовательности, согласованной с каскадным вычислителем 9, и излучают ее в пространство.
Этап Э2. Принимают отраженный от объектов сигнал светочувствительным элементом детектирования принимаемого сигнала 4.
Этап Э3. Производят интегрирование блоком 10 на временных отрезках длительности Т0 отраженного сигнала путем накопления емкостного заряда.
Этап Э4. Мультиплексируют результаты интегрирования, полученные на этапе 3 на быстродействующий АЦП 7.
Этап Э5. Преобразуют результаты интегрирования в цифровой код (блок АЦП).
Этап Э6. Подают цифровой код в первый блок накопления 12, в котором осуществляется накопление дискретного сигнала путем суммирования или вычитания отсчетов, получаемых с выхода АЦП 7 с содержимым ячеек памяти. Перед пуском устройства все ячейки памяти первого блока накопления обнуляются.
Этап Э7. Считывают сигнал (последовательность), накопленный в ячейках памяти блока накопления 12, и подают его на каскадный вычислитель 9.
Этап Э8. Подают последовательность с каскадного вычислителя 9 на второй блок накопления 13 дискретного сигнала путем суммирования или вычитания отсчетов, получаемых с выхода АЦП с содержимым ячеек памяти. Перед пуском устройства все ячейки памяти первого блока накопления обнуляются.
Этап Э9. Демультиплексируют (считывают в определенном порядке) содержимое ячеек памяти со второго блока накопления 13 на пороговый обнаружитель, соответствующий определенному пикселу (светочувствительному элементу детектирования принимаемого сигнала 4).
Этап Э10. При превышении порогового значения одним или двумя последовательными отсчетами выборки передают амплитуды и номера этих отсчетов на модуль 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Этап Э11. Вычисляют расстояние до отражающего объекта.
Этап Э12. Повторяют этапы Э1-Э11.
Промышленная применимость
Предлагаемое оптическое устройство для определения расстояний до объекта может быть осуществлено специалистом на практике, и при осуществлении обеспечивает реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением были проведены расчеты работы оптического устройства для определения расстояний до объекта.
Расчеты работы устройства показали, что оно обеспечивает возможность:
- сокращения количества операций, необходимых для вычисления расстояния до объекта,
- определения расстояний, превышающих порог дальности прототипа.
Покажем это на примере.
Пример работы устройства
Известны дополнительные последовательности (см. Варакин Л.Е. «Системы связи с шумоподобными сигналами». М.: Радио и связь, 1985).
Последовательности  и
и  называются дополнительными, если
называются дополнительными, если
 при µ=0 или
при µ=0 или  при µ=+/-1, …, +/- (N-1), где
при µ=+/-1, …, +/- (N-1), где
 ;
; 
Например, последовательности:
{1, 1, 1, -1, 1, 1, -1, 1}
{1, 1, 1, -1, -1, -1, 1, -1}
являются дополнительными.
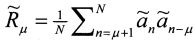
Значения их автокорреляционных функций, сумма их АКФ приведены в табл. 1.
Примером таких последовательностей являются D-коды.
Исходя из правила формирования D-кодов, возможно построить алгоритм их генерации и вычисления, основанный на формировании их по правилу присоединения.
Так, для формирования кодов d10={1, 1} и d11={-1, 1} можно использовать схему из одного сумматора, одного вычитателя и устройства задержки последовательности на один такт (на фиг. 4 задержка на один такт обозначена как Z-1). Подав на это устройство единичный импульс, получим на выходе 1, последовательность {1, 1}, а на выходе 2 {-1, 1}.
А для генерации кодов d20, d21, d22, d23 соответственно устройство, приведенное на фигуре 5.
На выходе (1) получим последовательность {-1, 1, 1, 1}
На выходе (2) получим последовательность {1, -1, 1, 1}
На выходе (3) получим последовательность {1, 1, -1, 1}
На выходе (4) получим последовательность {-1, -1, -1, 1}
Из структуры соединений видно, что любую D-последовательность можно получить путем соединения типовых элементов, состоящих из двух сумматоров (одного сумматора и одного вычитателя) и линии задержки на 2(i-1) тактов (где i=1, 2, 3 есть номер соответствующего каскада). Схема подобного устройства (каскада) приведена на фиг. 6.
Допустим, необходимо получить две дополнительных D-последовательности длины 8: {-1, -1, -1, 1, 1, 1, -1, 1} и {1, 1, 1, -1, 1, 1, -1, 1}. Пара подобных дискретных дополнительных последовательностей обладает той особенностью, что при суммировании их АКФ получим суммарную АКФ с нулевым уровнем боковых лепестков. Это используется в радиолокации для подавления боковых лепестков путем сложения двух взаимных корреляционных функций, полученных от обработки 2-х дополнительных сигналов.
На фиг. 7 нарисовано устройство, генерирующее эти последовательности.
На вход устройства подается последовательность {1, 0, 0, 0, 0, 0, 0, 0}.
В первом блоке (Каскад №1) задержка на 1 такт, во втором (Каскад №2) на 2, в 3-м (Каскад №3) на 4. С первого выхода получим последовательность
D1={-1, -1, -1, 1, 1, 1, -1, 1}, а со второго
D2={1, 1, 1, -1, -1, -1, 1, -1}.
Эти последовательности являются дополнительными.

В таблице 2 приведена только часть АКФ.
Это же устройство (на фиг. 7) является согласованным фильтром для дополнительных последовательностей, получаемых из сгенерированных последовательностей D1 и D2 перестановкой их в обратном порядке.
Эти последовательности, назовем их DM1 и DM2, так же являются дополнительными. DM1={1, -1, 1, 1, 1, -1, -1, -1, -1}; DM2={1, -1, 1, 1, -1, 1, 1, 1}.
Если подать на вход такого устройства (См. Фиг. 7) последовательность DM1, а затем DM2, и сложить результаты с выхода 1 и с выхода 2, то получим последовательность, состоящую из нулей и одного члена последовательности с амплитудой 16.
Каскадирование позволяет снизить вычисления, так, если N длина последовательности = 2i, где i - это число последовательно соединенных каскадов.
Тогда для вычисления одного отсчета нужно 2*i операций сложения, а не 2i.
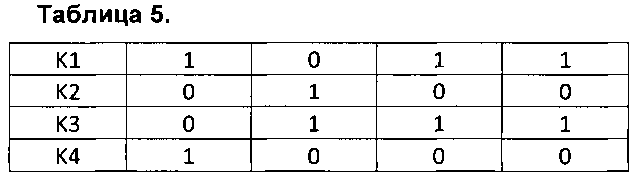
Возможно использовать подобный метод для обработки принимаемых бинарных сигналов, принимающих значения 0, 1. Для этого формируют из двух дополнительных последовательностей четыре последовательности, состоящие из нулей и единиц.
Последовательность К1 получается заменой минус единиц на нули в дополнительной последовательности DM1.
Последовательность К2 получается заменой единиц на нули и заменой минус единиц на единицы в дополнительной последовательности DM1.
Последовательность К3 получается заменой минус единиц на нули в дополнительной последовательности DM2.
Последовательность К4 получается заменой единиц на нули и заменой минус единиц на единицы в дополнительной последовательности DM2.
Далее последовательности К1, К2, К3, К4 из нулей и единиц используют для модуляции оптических сигналов, которые направляют на объект и принимают с объекта при помощи пиксела TOF-матрицы или иного фотоприемника и направляют на каскадный вычислитель.
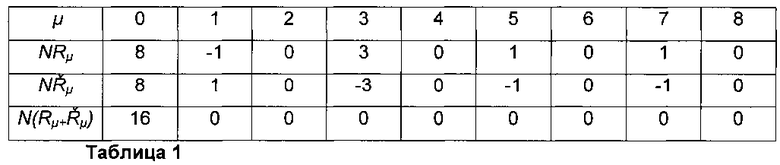
В таблице 3 приведены ВКФ (взаимные корреляционные функции) последовательностей DM1 с K1, -DM1 и K2, DM2 и K3 и ВКФ -DM2 и K4.
Последовательность -DM1 - это инвертированная последовательность DM1, и -DM2 - это инвертированная последовательность DM2
Для суммирования четырех ВКФ или более (при необходимости доп. накопления сигнала) используют блок накопления, в котором осуществляется накопление сигнала в регистре памяти, в котором каждому такту вычисления соответствует своя ячейка памяти, к содержимому которой прибавляется соответствующий отсчет с выхода вычислителя. На Фиг. 8 приведена схема вычислителя ВКФ, позволяющая осуществлять вычисление четырех указанных в таблице 3 ВКФ для их последующего суммирования. Сначала на вход устройства подается последовательность К1 и последовательность с выхода 1 каскада 3 каскадного вычислителя через переключатель выходов подается на блок накопления, для суммирования 4-х ВКФ. Затем подается последовательность К2 и последовательность с выхода 1 каскада 3 каскадного вычислителя через переключатель выходов инвертируется и подается на блок накопления (на фиг. 9 инвертирование путем умножения всех ее членов на «-1»). Затем подается последовательность К3 и последовательность с выхода 2 каскада 3 каскадного вычислителя через переключатель выходов подается на блок накопления. Затем подается последовательность К4 и последовательность с выхода 2 каскада 3 каскадного вычислителя через переключатель выходов инвертируется и подается на блок накопления.
Из DM кодов можно отобрать DM коды, в которых число единиц равно числу «-1». Такие коды обеспечивают полное подавление засветки фильтрации постоянной составляющей в принимаемом оптическом сигнале, без использования накопления. Это позволяет при необходимости отказаться от накопления сигналов (последовательностей) с выходов каскадного вычислителя, при условии если уровень боковых лепестков ВКФ позволяет разрешать сигналы от нескольких отражающих объектов.
При перестановках типовых каскадов в каскадном вычислителе, путем подачи на вход единичного импульса, так же получаются коды с аналогичными свойствами. Кроме того, из этих кодов, путем перебора (перестановка задержек в каскадах и соединений каскадов между собой), всегда можно отобрать коды с пониженным уровнем боковых лепестков АКФ и ВКФ (для случая ВКФ последовательности из -1 и 1 полученной путем подачи на вход каскадного вычислителя единичного импульса и последовательности из нулей и ед. полученной из указанной последовательности), который по крайней мере в 2 раза ниже, чем уровень боковых лепестков для АКФ и ВКФ кодов получаемых путем подачи на вход каскадного вычислителя, в котором величина задержки сигнала составляет 2(i-1), где i - номер каскада, единичного отсчета (импульса).
Если используются в каскадах каскадного вычислителя целочисленные сумматоры, то во избежание переполнения регистров сумматоров после проведения операций сложения или вычитания производится сдвиг регистра на одну позицию, что эквивалентно делению на 2.
Возможны 4 варианта каскадов в каскадном вычислителе:
Блок задержки располагается после входа 1,
Блок задержки располагается после входа 2,
Блок задержки располагается перед входом 1,
Блок задержки располагается перед входом 2.
Результаты их использования схожи.
Пример 1. ВКФ без оптимизации перестановкой каскадов и вариантов подключения
Подаем на вход каскадного вычислителя (см. фиг 9), состоящего из девяти каскадов, в которых установлены задержки на 1, 2, 4, 8, 16, 32, 64, 128, 256 соответственно, единичный отсчет. Полученную с выхода 2 последовательность из 512 отсчетов считываем в обратном порядке. При этом минус единицы заменяем нулями. Подадим эту последовательность снова на вход схемы, отраженной на фиг. 9. В результате чего получим на 512-м такте корреляционный отклик амплитудой 256, при этом амплитуда боковых пиков вычисляемой ВКФ не будет превышать 37. Данная ВКФ отображена на фигуре 10. На оси абсцисс указаны такты работы вычислителя с фиг 9, начиная с первого. На оси ординат - амплитуда сигнала с выхода вычислителя с фиг 9.
Пример 2. Минимаксная ВКФ
Пример два отличается от примера один только тем, что проведена оптимизация получаемого кода путем перестановки каскадов и соединений между каскадами (устройство на фиг. 11). На фиг. 12 показана минимаксная ВКФ, которая получается на выходе каскадного вычислителя (см. фиг. 11), в котором задержки следующие. В первом каскаде 128 тактов, во втором - 1, и так далее, 64, 2, 32, 4, 16, 8, 256, и между последним и предпоследним каскадом соединения произведены так, что первый выход предпоследнего каскада соединен со вторым входом последнего каскада и второй выход предпоследнего каскада соединен с первых входом последнего каскада.
Подаем на вход оптимизированного каскадного вычислителя единичный отсчет. Полученную на выходе 2 последовательность из 512 отсчетов считываем в обратном порядке, при этом минус единицы заменяем нулями. Подадим эту последовательность снова на вход схемы, отраженной на фиг. 11. В результате чего получил на 512-м такте корреляционный отклик амплитудой 256, при этом амплитуда боковых пиков вычисляемой ВКФ не будет превышать 17.
Данная ВКФ отображена на фигуре 12. На оси абсцисс указаны такты работы вычислителя с фиг. 11, начиная с первого. На оси ординат - амплитуда сигнала с выхода вычислителя с фиг. 11.
Пример 3. Использование первого накопителя сигнала
Используется каскадный вычислитель, указанный в примере 2.
Подаем на вход оптимизированного каскадного вычислителя единичный отсчет. Полученную на выходе 2 последовательность из 512 отсчетов считываем в обратном порядке. Из полученной последовательности формируем 2 последовательности, в первой из которых «минус единицы» в полученной последовательности заменяем на «нули», а во второй «единицы» заменяем на «нули», а «минус единицы» на «единицы». К полученным членам последовательностям прибавляем постоянную величину С, аналог сигнала засветки. Далее подаем члены последовательность 1 в первый блок накопления, где члены последовательности записываются последовательно в ячейки памяти. Далее подаем на блок накопления 2-ю последовательность, при этом из каждой ячейки памяти в том же порядке считываем члены последовательности 1 и вычитаем из них соответствующие члены последовательности 2. (Результат вычитания при необходимости дальнейшего накопления записываем последовательно в те же ячейки памяти). Подаем последовательность, представляющую собой результат вычитания, на каскадный вычислитель из примера 2 (см. фиг. 11). В результате чего получил на 512-м такте корреляционный отклик амплитудой 512, при этом амплитуда боковых пиков вычисляемой ВКФ не будет превышать 17. Таким образом за УБЛ результирующей ВКФ снизился в 2 раза (при использовании одной последовательности 17/256, а при 2-х с блоком накопления 17/512).
Пример 4. Использование второго блока накопления
Используем дополнительные коды длины N=4.

Из них получаем 4 дополнительных последовательности, используемых для модулирования излучаемого на объект оптического сигнала.
Далее последовательности К1, К2, К3, К4 используются для модулирования четырех оптических сигналов, излучаемых в пространство с интервалом более чем T0*N.
Излучаемый сигнал принимается светочувствительным элементом детектирования принимаемого сигнала, интегрируется на отрезках T0.
Фигура 13 изображает графики Б, Е, К, О, на которых отражены излучаемые сигналы, модулированные последовательностями К1, К2, К3, К4, и эти же сигналы, отраженные от объекта (графики В, Ж, Л, П), процесс интегрирования принимаемых сигналов (графики Г, З, М, Р), на временных интервалах длительности, дискретные отсчеты, получаемые в результате интегрирования на интервалах, отражены соответственно на графиках Д, И, Н, С. На графике А отображены синхроимпульсы и их номера, подаваемые на генератор создания модуляции 2, отраженный на фигуре 3.
В результате чего получаются дискретные последовательности. На фиг. 13 приводятся графики, на которых отражены излучаемые последовательности К1, К2, К3, К4 (графики Б, Е, К, О на фигуре 13). И те же последовательности, принимаемые светочувствительным элементом детектирования, отраженного оптического сигнала с некоторой задержкой, которую нужно определить (графики В, Ж, Л, П на фигуре 13). Так же отображен процесс интегрирования детектируемого оптического сигнала (графики Г, З, М, Р на фигуре 13) и получаемые в результате интегрирования на отрезках Т0 дискретные отсчеты (графики Д, И, Н, С на фигуре 13), которые далее через мультиплексор и быстродействующее АЦП подаются на вычислитель ВКФ. Первая дискретная последовательность, получаемая путем детектирования отраженного сигнала К1, подается на трансверсальный фильтр, в котором осуществляется сложение N (Т=4) дискретных отсчетов, а именно отсчета подаваемого на вход фильтра с весовым коэффициентом {1}, отсчета подаваемого на вход ранее на 1 такт синхросигнала с весовым коэффициентом {1}, отсчета подаваемого на вход ранее на 2 такта синхросигнала с весовым коэффициентом {-1} и отсчета подаваемого на вход ранее на 3 такта синхросигнала с весовым коэффициентом {1}. Или иными словами можно сказать, что последовательность подается на дискретный трансверсальный фильтр с откликом на единичный импульс {1, 0, 0, 0}, равным {1, 1,-1, 1}, т.е. соответствующей указанному в примере коду D1, считанному в обратном порядке.
Вторая дискретная последовательность, получаемая путем детектирования отраженного сигнала К2, подается на трансверсальный фильтр с импульсным откликом {-1, -1, 1, -1}, т.е. соответствующей указанному в примере коду D1, считанному в обратном порядке и инвертированному.
Третья дискретная последовательность, получаемая путем детектирования отраженного сигнала К3, подается на трансверсальный фильтр с импульсным откликом {1, 1, 1, -1}, т.е. соответствующей указанному в примере коду D2, считанному в обратном порядке.
Четвертая дискретная последовательность, получаемая путем детектирования отраженного сигнала К4, подается на трансверсальный фильтр с импульсным откликом {-1, -1, -1, 1}, т.е. соответствующей указанному в примере коду D2, считанному в обратном порядке и инвертированному.
Четыре последовательности с выходов трансверсальных фильтров последовательно суммируются в блоке накопления.
В таблице 6 приводятся результаты подачи последовательностей, получаемых в результате синхронного детектирования на трансверсальные фильтры с соответствующими весовыми коэффициентами, и результирующий сигнал с блока накопления, используемый для определения задержки.
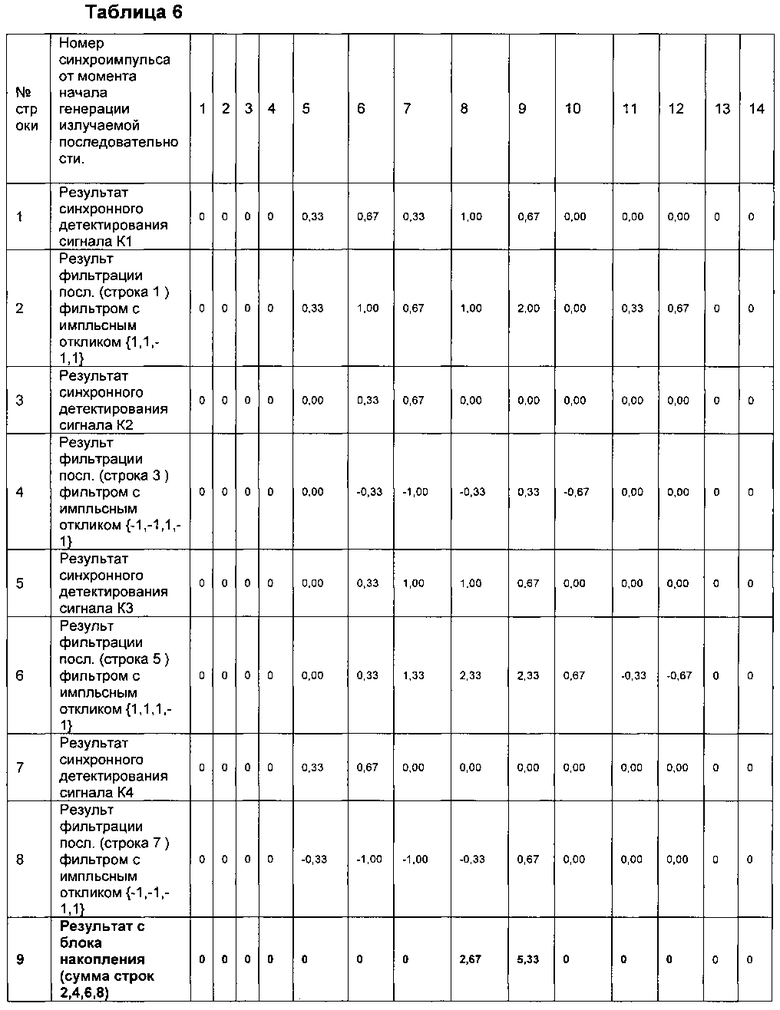
В момент времени, соответствующему 8-у и 9-у синхроимпульсам, на выходе блока накопления пороговым обнаружителем зафиксировано превышение порога (допустимый пороговый уровень обнаружения сигнала равен 1, 0). Определим расстояние до объекта грубо по номеру синхроимпульса, на котором произошло пороговое обнаружение. Номер этого синхроимпульса в примере равен 8.
Rгр.=((m-1-N)T0)C/2, где N - это число позиций 0 и 1 в зондирующем сигнал N=4, а m это номер синхроимпульса, на котором произошло пороговое обнаружение m=8.
Rгр.=3Т0С/2
Определим поправку к расстоянию до объекта, используя информацию об амплитуде второго отсчета с выхода блока накопления, следующего за первым отсчетом, превышающим порог.
dR=Q2/(Q1+Q2)T0=5,3333/(5,3333+2,6667)T0=0,6667*Т0*С/2, где Q1 - это амплитуда первого отсчета на выходе бока накопления, превышающего пороговое значение (в таблице 6 - это отсчет с номером 8), а Q2 - второго, следующего за ним.
Расстояние до объекта Rточ.=Rгр.+dR=3,6667*Т0*С/2.
Таким образом, в данном изобретении достигнута поставленная задача - увеличение динамического диапазона по отраженным сигналам от объектов и снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули.
Кроме того, оказалось, что достигаются и такие технические результаты, как:
- полное подавление боковых лепестков в последовательности, подаваемой на пороговый обнаружитель, что позволяет увеличить динамический диапазон по амплитуде отраженных сигналов от объектов, расстояние до которых определяется.
- полное (100%) подавление сигнала засветки.
Рекомендуется применять данное изобретение для:
- лазерной дальнометрии,
- трехмерного лазерного картографирования,
- систем технического зрения, в т.ч. и для летательных аппаратов, робототехнических систем, систем охраны и мониторинга за перемещением удаленных объектов,
- рефлектометрии оптических волокон, нахождения дефектов в оптоволоконных кабелях,
- устройств волоконно-оптического мониторинга удаленных протяженных объектов,
- в радарах миллиметрового и субмиллиметрового диапазонов с прямым детектирование сигналов от приемных элементов (антенн), расположенных в виде приемной матрицы.

Способ определения расстояний до объекта включает в себя генерацию тактового сигнала, модуляцию указанного тактового сигнала, излучают на объект модулированный бинарный оптический сигнал, принимают отраженный сигнал от объекта, вычисляют корреляцию излученного и отраженного сигналов, вычисляют расстояние до определяемого объекта по временной задержке отраженного сигнала. При этом создают по меньшей мере одну модуляцию в виде псевдошумовой последовательности, согласованной с каскадным коррелятором. Производят интегральное накопление отраженного сигнала, идущего с выхода светочувствительного элемента. Производят мультиплексирование сигналов, идущих или от различных светочувствительных элементов или от различных псевдошумовых последовательностей. Технический результат - увеличение динамического диапазона по отраженным сигналам от объектов и снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули. 2 н. и 14 з.п. ф-лы, 6 табл., 14 ил.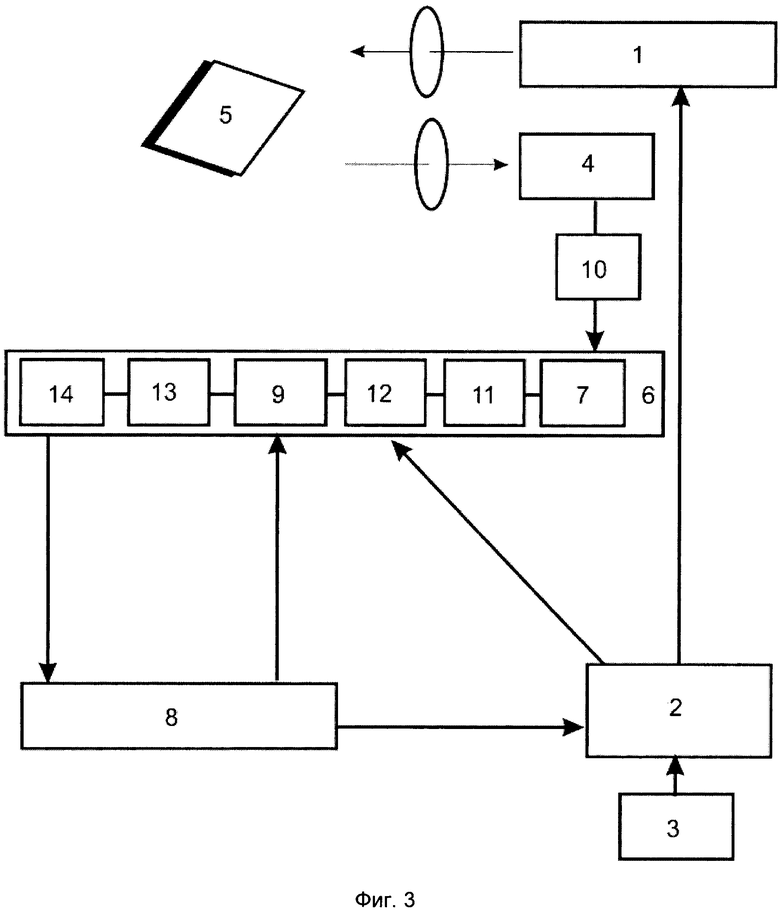
1. Способ определения расстояний до объекта, включающий в себя следующие этапы, при которых:
- генерируют тактовый сигнал,
- создают модуляцию указанного тактового сигнала,
- излучают на объект модулированный бинарный оптический сигнал,
- принимают посредством светочувствительного элемента отраженный оптический сигнал от объекта,
- преобразуют полученный отраженный сигнал из аналогового в цифровой,
- вычисляют корреляцию излученного и отраженного сигналов,
- вычисляют расстояние до определяемого объекта по временной задержке отраженного сигнала,
отличающийся тем, что
- создают по меньшей мере одну модуляцию в виде псевдошумовой последовательности, согласованной с каскадным вычислителем, выполненным с возможностью вычисления взаимнокорреляционной функции испускаемого и принимаемого сигналов,
- производят интегральное накопление отраженного сигнала, идущего с выхода светочувствительного элемента,
- производят мультиплексирование сигналов, идущих от различных М принимающих элементов, для чего подают сигналы в каскадный вычислитель через мультиплексор, обеспечивая возможность вычисления (обработки) одним каскадным вычислителем множества различных дискретных сигналов одновременно.
2. Способ по п. 1, отличающийся тем, что производят поочередное накопление сигналов, идущих с первого и второго выходов каскадного вычислителя, при этом для модуляции зондирующего сигнала используются псевдошумовые дополнительные последовательности.
3. Способ по п. 1, отличающийся тем, что производят накопление сигнала, идущего на вход каскадного вычислителя.
4. Способ по п. 1, отличающийся тем, что производят демультиплексирование сигналов, идущих с выхода каскадного вычислителя или блока накопления.
5. Способ по п. 1, отличающийся тем, что создают две различные модуляции в виде двух дополнительных псевдошумовых последовательностей, отличающихся только тем, что в одной из них позиции «0» заменены на позиции «1», а в другой позиции «0» заменены на «-1».
6. Способ по п. 1, отличающийся тем, что создают различные модуляции в дополнительных псевдошумовых последовательностей, количество которых кратно двум.
7. Способ по п. 1, отличающийся тем, что располагают чувствительные к электромагнитным волнам, в том числе и оптическому излучению, элементы детектирования отраженного сигнала на гиростабилизированной платформе.
8. Способ по п. 1, отличающийся тем, что располагают перед входом оптического сигнала на светочувствительные элементы поляризационный фильтр.
9. Оптическое устройство для определения расстояний до объекта, включающее в себя:
- источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с первым выходом
- генератора создания модуляции, первый вход которого соединен с выходом
- генератора тактового сигнала,
- светочувствительный элемент детектирования отраженного оптического сигнала от объекта, выход которого соединен с первым входом
- модуля вычисления корреляции излученного и отраженного сигналов, содержащего аналогово-цифровой преобразователь,
- первый выход модуля вычисления корреляции излученного и отраженного сигналов соединен со входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, первый выход которого соединен с вторым входом генератора создания модуляции, а второй выход которого соединен с вторым входом модуля вычисления корреляции излученного и отраженного сигналов,
- второй выход генератора создания модуляций соединен с третьим входом модуля вычисления корреляции излученного и отраженного сигналов,
отличающееся тем, что
- генератор создания модуляции выполнен в виде генератора по меньшей мере одной псевдошумовой последовательности, согласованной с каскадным вычислителем,
- выход светочувствительного элемента детектирования отраженного оптического сигнала от объекта соединен со входом модуля интегрирования, выход которого соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов,
- модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит последовательно соединенные между собой мультиплексор и каскадный вычислитель.
10. Оптическое устройство по п. 9, отличающееся тем, что модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит первый блок накопления, выход которого соединен со входом каскадного вычислителя, а вход которого соединен с выходом мультиплексора.
11. Оптическое устройство по п. 10, отличающееся тем, что модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит второй блок накопления, вход которого соединен с выходом каскадного вычислителя.
12. Оптическое устройство по п. 10, отличающееся тем, что модуль вычисления корреляции излученного и отраженного сигналов дополнительно содержит демультиплексор, вход которого соединен с выходом первого блока накопления.
13. Оптическое устройство по п. 9, отличающееся тем, что генератор создания модуляции выполнен в виде генератора двух дополнительных псевдошумовых последовательностей, согласованных с каскадным вычислителем.
14. Оптическое устройство по п. 9, отличающееся тем, что генератор создания модуляции выполнен в виде генератора дополнительных псевдошумовых последовательностей, количество которых кратно двум, согласованных с каскадным вычислителем.
15. Оптическое устройство по п. 9, отличающееся тем, что светочувствительный элемент детектирования отраженного оптического сигнала расположен на гиростабилизированной платформе.
16. Оптическое устройство по п. 9, отличающееся тем, что светочувствительный элемент детектирования отраженного оптического сигнала имеет поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент.
| US 7202941 B2, 10.04.2007 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| Способ измерения расстояний до объекта и устройство для его осуществления | 1990 |
|
SU1779919A1 |
| WO 2012014077 A2, 02.02.2012. | |||

