Предшествующий уровень техники
Известны акустические детекторы газов и паров [1, 2], содержащие рабочие камеры, в которых расположены пьезокерамические преобразователи (излучатель и приемник акустических колебаний), подключенные к входу и выходу электронных усилителей. Разность скоростей распространения звуковых колебаний в камерах пропорциональна изменению суммарной скорости звука в зависимости от фазового состава смеси прокачиваемой через эти камеры. Данный информационный параметр является функцией концентрации компонента в газе-носителе (жидкостях и парах) и связан с молекулярной массой данного компонента.
Импульсно-фазовый способ измерения скорости звука, примененный в данных детекторах, основан на компенсации акустического импульса, прошедшего газовый тракт, и электрического импульса, прошедшего во входную цепь приемника. Данные детекторы обеспечивают высокую точность измерения, однако их недостатком является сложность конструкции и необходимость использования дополнительного побудителя расхода для использования их в целях создания оборудования неразрушающего контроля, а именно -системах контроля герметичности. Также необходимо отметить, что данные детекторы являются параметрическими (или одноканальными), т.е. компенсация изменения внешних условий для таких анализаторов представляет собой сложную научно-техническую задачу.
Известен акустический детектор [3], содержащий двухканальную схему волноводов, включенную по дифференциальной схеме, в торцах которых с одной стороны размещены источники звуковых колебаний, а с другой приемники, при этом рабочий канал прокачивается анализируемым газом через штуцеры, а канал сравнения герметичен. Информативным параметром является разница скоростей распространения ультразвуковых колебаний в рабочем канале и в герметичном канале сравнения. Данный детектор, в основном, предназначен для измерений при идеальных условиях, так в нем компенсируется влияние изменения температуры при проведении испытаний (измерений), однако не обеспечивается компенсация изменения давления. Кроме того детектор громоздок и технически сложен в изготовлении, а также требует дополнительного побудителя расхода для целей течеискания, и не обеспечивает портативности.
Известен акустический анализатор [4], представляющий собой двухканальную схему, содержащую канал сравнения и рабочий канал, в которых размещены пьезопреобразователи соосно-связанные с акустическими впадинами, представляющими собой акустические зеркала. Акустическое колебание, излучаемое пьезопреобразователем, проходит канал волновода и, попадая в акустическое зеркало, возвращается обратно к пьезопреобразователю, который к тому времени переходит из режима излучения в пассивный режим (начинает выполнять функции приемника). Информативным параметром является измеренное значение разности скорости звука в смеси рабочего канала и канала сравнения. Данный анализатор технически сложен в изготовлении, а также требует дополнительного побудителя расхода для целей течеискания.
Известен акустический детектор [5], представляющий собой двухканальную схему акустических волноводов, включенную по дифференциальной схеме, содержащую рабочую и сравнительные камеры, в торцах которой расположены пьезокерамические преобразователи - источники и приемники ультразвуковых колебаний, также содержащий штуцеры для прокачки газа, расположенные в непосредственной близости от пьезокерамических преобразователей для обеспечения наибольшей длины измерительной части волновода. Данный акустический детектор, также содержит генератор, обеспечивающий последовательности электрических высокочастотных колебаний, два волновода с входными и выходными штуцерами (опорный канал и канал измерения), также содержащие генераторы и приемники акустических импульсов. Также детектор содержит логические узлы - узел синхронизации электрических импульсов с генератора и принимаемых электрических импульсов с приемников, узел регистрации момента прихода акустических колебаний, который управляет таймер-счетчиком, фиксирующим разность времени распространения акустических импульсов на приемниках волноводов, которые в свою очередь регистрируют разность времени распространения акустических колебаний в опорном и измерительном каналах.
Процесс работы указанного анализатора заключается в том, что генератор возбуждает высокочастотные электрические импульсы, поступающие на источники акустических импульсов, при этом акустические импульсы распространяются по камерам волноводов и достигают приемников акустических колебаний в опорном и измерительном каналах.
Узел синхронизации обеспечивает синхронизацию генератора электрических высокочастотных колебаний с узлом регистрации момента прихода акустических колебаний. Узел регистрации запускает таймер-счетчик в момент прихода акустических колебаний в опорном канале и останавливает таймер-счетчик в момент прихода акустических колебаний в измерительном канале. Значение, зафиксированное таймером-счетчиком, пропорционально времени распространения акустических колебаний в опорном и измерительном каналах.
Данный анализатор (детектор) обеспечивает высокую точность измерения, однако его недостатком является сложность конструкции и необходимость использования дополнительного побудителя расхода для использования его в целях создания оборудования неразрушающего контроля, а именно - системах контроля герметичности. Также необходимо отметить, что данный детектор использует в качестве информативного параметра только временную характеристику распространения акустической волны в волноводах, однако не менее информативной частью является изменение амплитуды указанной волны.
Данный акустический детектор [5] выбран в качестве прототипа.
Известен [6] способ измерения параметров жидких сред по затуханию ультразвука используемый в системах контроля физико-химических сред. Данный способ позволяет преодолеть влияние помех и увеличить скорость измерения за счет того, что высокочастотные колебания, проходящие через исследуемую среду, модулируют по амплитуде, а о затухании ультразвука судят по взаимной корреляционной функции между величинами детектированного сигнала с приемного пьезопреобразователя и переменной составляющей модулирующего сигнала. Способ позволяет повысить точность измерения за счет уменьшения влияния низкочастотных шумов и наводок, а также увеличить скорость измерений за счет использования дискретного математического анализа. При этом, в данном способе, генерируют электрические колебания высокой частоты, возбуждают ими излучающий пьезопреобразователь, преобразуя тем самым электрические колебания в ультразвуковые, пропускают последние через исследуемую среду, преобразуют их с помощью приемного пьезопреобразователя вновь в колебания электрические, усиливают и детектируют электрические сигналы приемного пьезопреобразователя, а также преобразуют сигнал, действующий в цепи излучающего пьезопреобразователя, затем сравнивают преобразованные излучаемый и принятый сигналы и по результатам сравнения с учетом эталонных значений судят о коэффициенте затухания ультразвука, зависящем от параметров жидких сред. При этом согласно изобретению, высокочастотные колебания модулируют по амплитуде, а о затухании судят по взаимной корреляционной функции между величинами детектированного сигнала приемного пьезопреобразователя и переменной составляющей модулирующего сигнала достаточно высокой частоты (порядка 50 кГц).
Проходя через исследуемую среду, ультразвуковые волны, возбуждаемые пьезопреобразователем, частично поглощаются, причем степень поглощения зависит от концентрации, например, растворенных солей или взвешенных в жидкости частиц, а также от частоты ультразвуковых колебаний.
Недостатком данного способа является то, что измерения свойств эталонной жидкости (как среды сравнения) приходится проводить заблаговременно, результат при этом записывается в запоминающее устройство и лишь время от времени его корректируют, что снижает достоверность измерений за счет достаточно быстрого изменения условий испытаний при проведении течеискания. Кроме того в реализации данного способа временной сдвиг между рассматриваемыми сигналами (между фазами этих сигналов) не учитывается в качестве информационного параметра, что приводит к потере важной информационной составляющей необходимой для проведения контроля герметичности.
Известен [7] способ контроля состава газовой смеси и жидких сред, заключающийся в периодическом возбуждении акустических колебаний в контролируемой среде и в последующем измерении частоты колебаний. При этом способе через измерительную ячейку (волновод) периодически или непрерывно пропускают (наполняют) контролируемую среду, с известным на момент первого контрольного измерения составом. При этом периодически в волноводе с известной длиной и диаметром, возбуждают кратковременные акустические синусоидальные колебания, далее преобразуют их в электрические сигналы, усиливают, и измеряют амплитуду сигнала, период колебаний и температуру среды внутри волновода, на основании вычисленных параметров делают заключение об изменении среды относительно эталонного значения.
Основными недостатками данного способа является то, что измерения свойств эталонной жидкости (как среды сравнения) приходится проводить заблаговременно, результат при этом записывается в запоминающее устройство и лишь время от времени его корректируют, что снижает достоверность измерений за счет достаточно быстрого изменения условий испытаний. Кроме того в реализации данного способа требуется использование дополнительных насосов, обеспечивающих постоянство расхода перекачиваемой среды, что является ограничением при локализации места течи в процессе контроля герметичности для реализации способа. Среди недостатков также можно выделить большую трудоемкость при реализации способа. Также среди недостатков можно выделить влияние помех, а также то, что в реализованном способе обеспечивается низкая скорость вычисления информационных составляющих.
Наиболее близким по существу технического решения и достигаемому результату является [5]. Данное техническое решение принято за прототип.
Задачей группы изобретений является упрощение схемы детектора текучей среды, уменьшение его размеров, уменьшение влияния помех, а также адаптация схемы акустического детектора для нужд неразрушающего контроля - систем контроля герметичности. Также задачей группы изобретений является повышение точности измерения скорости звука и амплитуды в исследуемой текучей среде при обеспечении минимальных вычислительных ресурсов и уменьшении постоянной времени срабатывания детектора акустических колебаний.
Краткое описание фигур
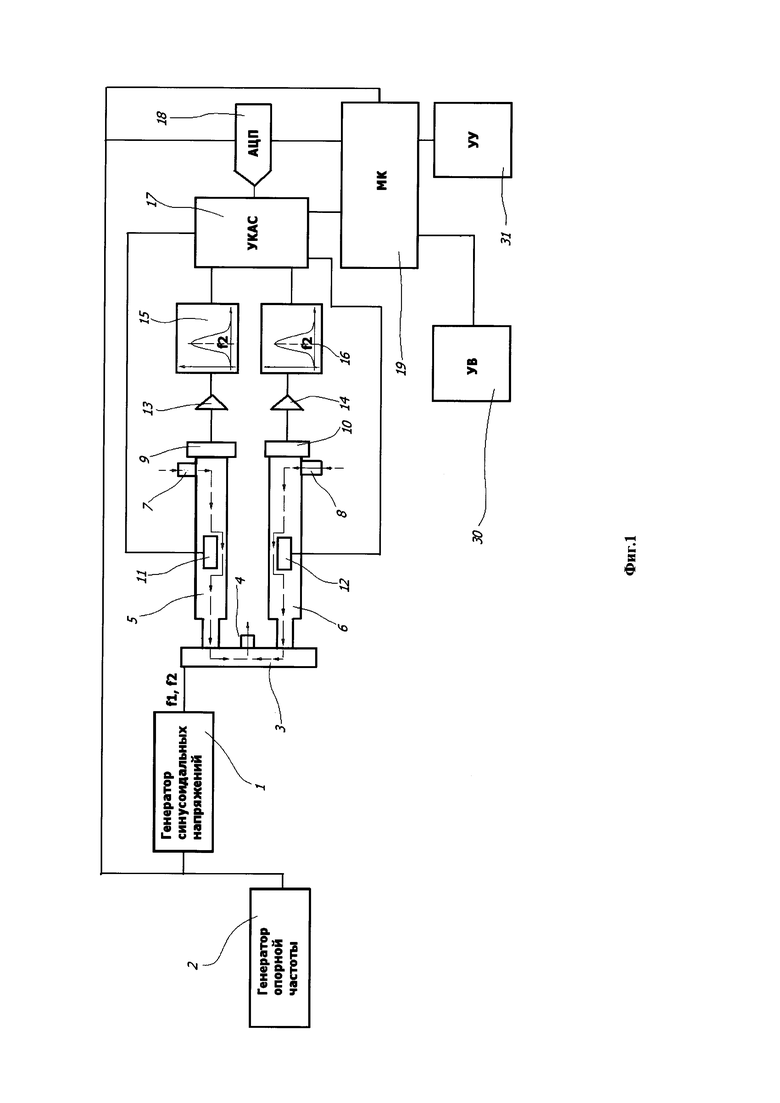
На фиг. 1 представлена структурная схема измерительного устройства акустического детектора текучей среды, включающая: 1 - генератор синусоидальных напряжений, 2 - генератор опорной частоты, 3 - акустический насос, содержащий выход 4 текучей среды, конструктивно и акустически связанный с волноводами 5 и 6, содержащими входы газа 7 и 8 соответственно, содержащими опорную среду (среду сравнения) и анализируемую среду. Волноводы 5 и 6 содержат в своем составе приемники акустических колебаний 9 и 10, расположенные в их торцах. Волноводы 5 и 6 содержат в своем составе устройства измерения температуры 11 и 12 прокачиваемой текучей среды. Приемники акустических колебаний 9 и 10 электрически связаны с усилителями электрических сигналов 13 и 14 соответственно, которые, в свою очередь, связаны с полосовыми фильтрами 15 и 16 соответственно. Полосовые фильтры 15, 16 и устройства измерения температуры 11, 12 электрически связаны с устройством коммутации аналоговых сигналов 17, которое, в свою очередь, связано с аналого-цифровым преобразователем 18 и микроконтроллером 19. Аналого-цифровой преобразователь 18 также связан с микроконтроллером 19. При этом микроконтроллер 19 связан с устройством визуализации 30 и устройством управления 31. Генератор синусоидальных напряжений 1, аналого-цифровой преобразователь 18 и микроконтроллер 19, связаны с генератором опорной частоты 2 для задания единой точки отсчета времени. Также на фигуре 1 схематично представлено направление потоков анализируемой среды.
На фиг. 2 представлена конструктивно-компоновочная схема (изометрия) детектора текучей среды, содержащая источник акустического поля 20, на клеммы 21 которого подается питающее напряжение U1 от генератора синусоидальных напряжений 1 (фиг. 1). Источник акустического поля 20 в плоскости А-А', Н-Н' герметично связан с рабочей камерой 32 акустического насоса корпуса анализатора 22 по торцевой окружности в плоскости Б-Б', С-С'. Рабочая камера 32 детектора 22 содержит вход 7 опорной среды и вход 8 анализируемой среды, а также выход 4 среды. Кроме того, на фиг. 2 схематично представлен объект контроля, заполненный пробным газом под давлением с течью пробного газа, располагающейся в непосредственной близости от точки входа 8 анализируемой среды. Размеры анализатора и объекта контроля, представленные на фиг. 2, не соответствуют реальным, что сделано в целях облегчения восприятия.
На фиг. 3а представлена схема (изометрия) проведения контроля герметичности, с использованием акустического детектора (анализатора) газов, паров и жидкостей, включающая линейные размеры от точек входа среды 7 и 8 (фиг. 2) до объекта контроля.
На фиг. 3б представлен график зависимости изменения концентрации контрольной среды выходящей из течи в объекте контроля от расстояния до объекта контроля. Размеры анализатора и объекта контроля, представленные на фиг. 3а, не соответствуют реальным, что сделано в целях облегчения восприятия.
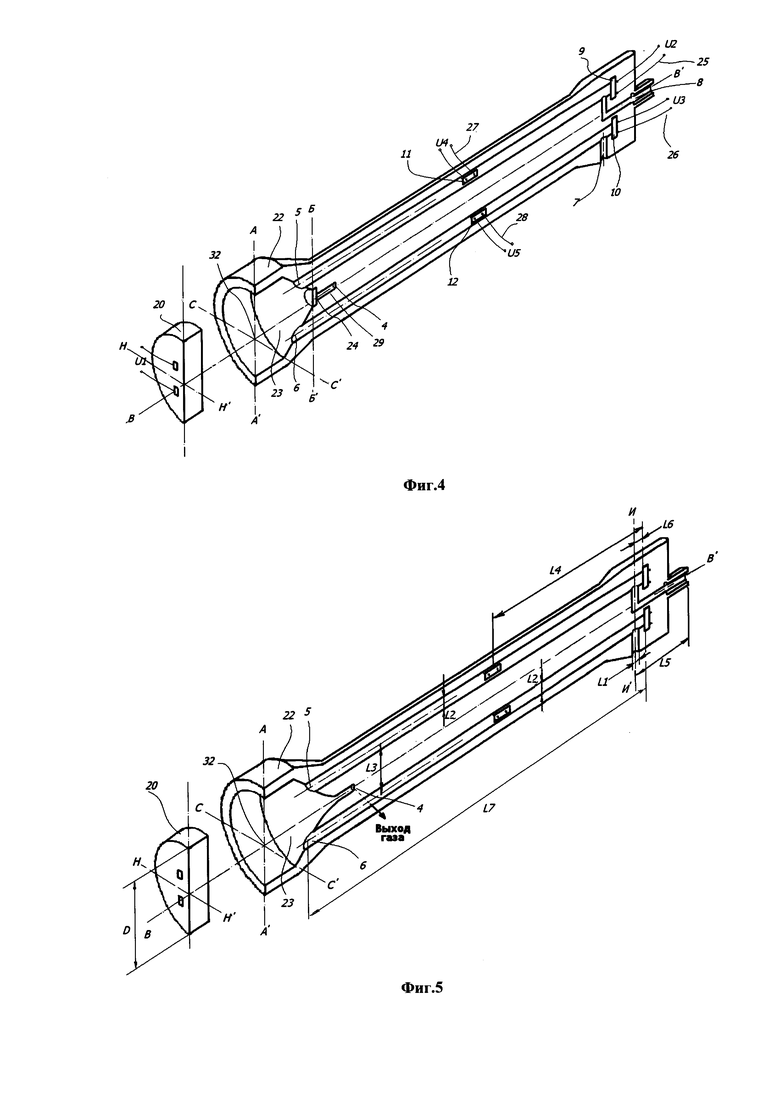
На фиг. 4 представлен разрез (изометрия) по плоскости А-А', Б-Б' (фиг. 2) варианта исполнения детектора текучей среды. На данной фигуре представлены волноводы 5 и 6, герметично связанные с поверхностью 23 рабочей камеры акустического насоса 32 корпуса 22, которые располагаются со стороны колеблющейся поверхности источника акустического поля 20, которые в свою очередь являются составной частью акустического насоса 3 (фиг. 1).
Составной частью акустического насоса 3 (фиг. 1) является клапан 24, располагающийся в непосредственной близости от оси звукового луча, с колеблющейся стороны источника акустического поля 20. В торцах волноводов 5 и 6, в непосредственной близости от входов среды 7 и 8 (фиг. 2), располагаются приемники акустических колебаний 9 и 10, имеющие электрические клеммы 25, 26, с которых снимается напряжение U2 и U3 соответственно. Также внутри волноводов располагаются измерители температуры среды 11, 12 с клеммами 27, 28, с которых снимаются напряжения U4, U5.
На фиг. 5 представлен разрез (изометрия) по плоскости А-А', Б-Б' (фиг. 2) варианта исполнения детектора текучей среды, не содержащего газового клапан насоса 24 (фиг. 4), выход среды 4 располагается в непосредственной близости от оси звукового луча с колеблющейся стороны источника акустического поля 20 (фиг. 4). Также, на фиг. 5 обозначены линейные размеры L1, L2, L3, L4, L5, L6, L7, D смысл которых будет пояснен в описании работы устройства.
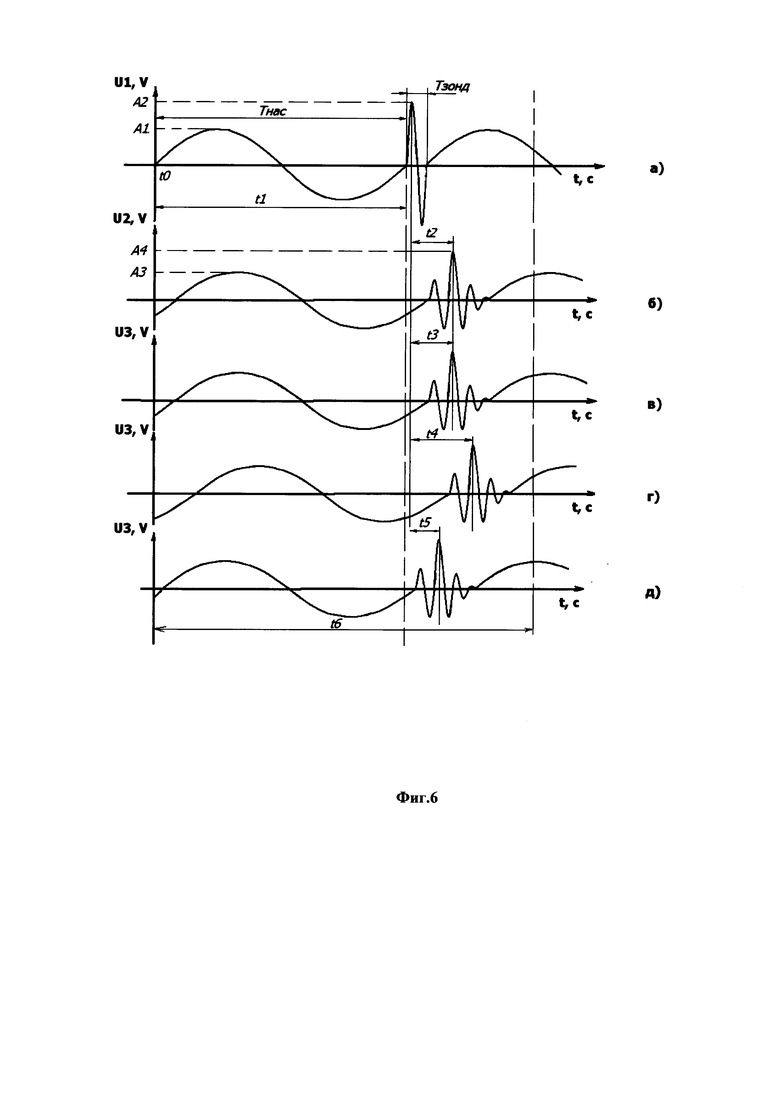
На фиг. 6 представлены зависимости амплитуд электрических сигналов от времени. Так на фиг. 6а представлена зависимость амплитуды электрического сигнала U1, подаваемого на клеммы акустического насоса 3 (фиг. 1). На фиг. 6б представлена зависимость принимаемого сигнала U2 с приемника акустических колебаний 9 волновода 5 (фиг. 4), содержащего опорную среду от времени. На фиг. 6в представлена зависимость амплитуды принимаемого сигнала U3 с приемника акустических колебаний 10 волновода 6 (фиг. 4.), содержащего анализируемую среду без изменения ее физических свойств относительно опорной среды. На фиг. 6г представлена зависимость амплитуды принимаемого сигнала U3 с приемника акустических колебаний 10 волновода 6 (фиг. 4), содержащего анализируемую среду с физическими свойствами, отличающимися по скорости звука относительно опорной среды в сторону уменьшения. На фиг. 6д представлена зависимость амплитуды принимаемого сигнала U3 с приемника акустических колебаний 10 волновода 6 (фиг. 4), содержащего анализируемую среду с физическими свойствами, отличающимися по скорости звука относительно опорной среды в сторону ее увеличения. На графиках фиг. 6а-д показаны временные интервалы t0-t6, поясняющие работу описываемого устройства.
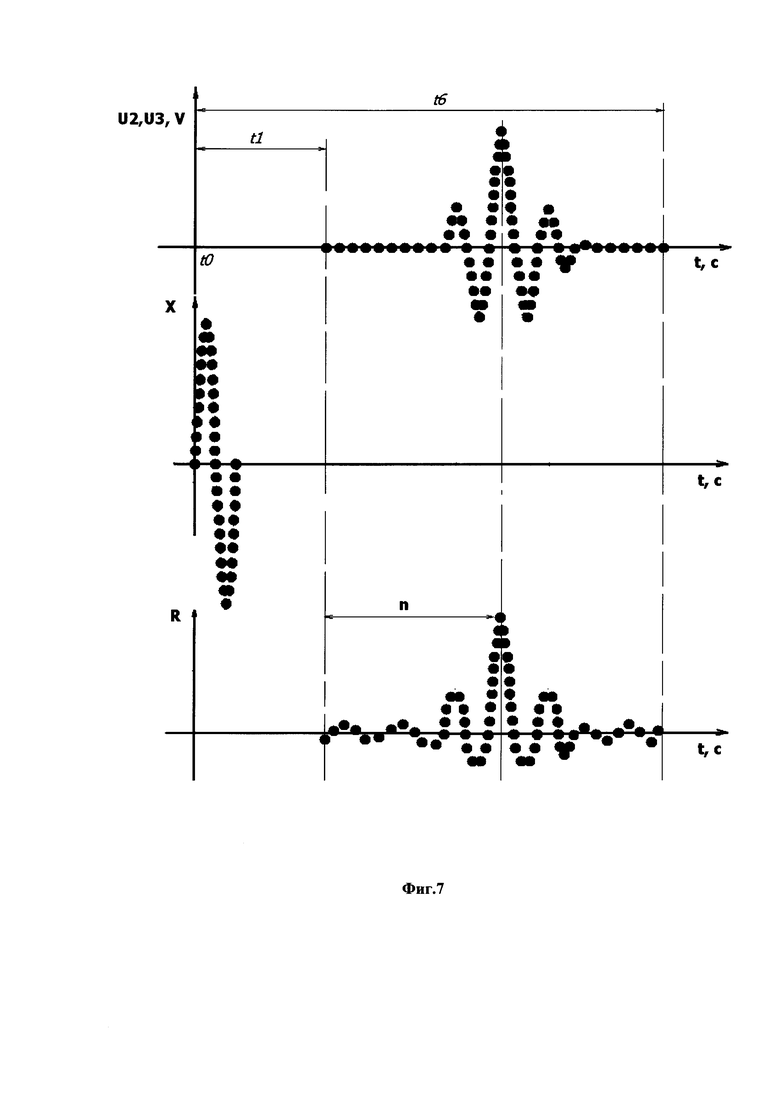
На фиг. 7 условно показаны выборки принятого сигнала с приемников акустических колебаний, хранящиеся в памяти микроконтроллера. Выборки на фиг. 7 расположены по оси времени t в соответствии с моментами их захвата. На фиг. 7 по оси ординат отложены амплитуды принятых сигналов U2 и U3, выраженные в единицах дискретизации аналого-цифрового преобразователя (АЦП). Момент времени t0 показывает момент начала формирования очередного зондирующего импульса генератором. Момент времени t1 соответствует началу взятия выборок сигнала АЦП. Момент t6 соответствует моменту взятия последней выборки в данном цикле. Также на фиг. 7 показаны отсчеты образа зондирующего импульса, хранящегося в памяти микроконтроллера. Ось ординат соответствует значениям отсчетов X. Также на фиг. 7 показан массив отсчетов функции взаимной корреляции образа зондирующего импульса и выборок принятого сигнала. Номер отсчета относительно начала массива, имеющего максимальное значение, обозначен n. Ось ординат соответствует значениям отсчетов R.
Все перечисленные фигуры отражают способ решения поставленной задачи. Далее будет приведено раскрытие изобретения согласно перечисленным фигурам. При этом надо понимать, что фигуры, указанные выше, не содержат исчерпывающего описания, а иллюстрируют лишь варианты исполнения заявляемого изобретения.
Раскрытие изобретения
Указанная задача группы изобретений решается за счет того, что устройство - акустический детектор текучей среды, как следует из конструктивно-компоновочной схемы (фиг. 2), и структурной схемы измерительного устройства (фиг. 1), включает в себя перекачивающее устройство, использующее в качестве рабочего тела - текучую среду (жидкости, капельные жидкости, газы и пары), а в качестве побудителя расхода - энергию акустических колебаний им формируемую (далее акустический насос). Рабочая камера акустического насоса 32 (фиг. 2, фиг. 4) конструктивно и акустически связанный с волноводами 5 и 6 (фиг. 1, фиг. 4), содержащими входы текучей среды 7 и 8 соответственно, которые по сути являются входами текучей среды в акустический насос. Перекачиваемая по волноводам текучая среда (в направлении указанном на фиг. 1), попадает в них через входы газов 7 и 8, а затем в акустический насос и выбрасывается через его выход 4 (фиг. 1, фиг. 4). Волноводы 5 и 6 содержат в своем составе приемники акустических колебаний 9 и 10, расположенные в их торцах (фиг. 1, фиг. 4), служащие для регистрации акустических колебаний, генерируемых акустическим насосом, и распространяющихся по волноводам, а также устройства измерения температуры 11 и 12. В качестве приемников акустических колебаний могут быть использованы конденсаторные микрофоны, динамические микрофоны, угольные микрофоны и пьезомикрофоны, а также оптоакустические микрофоны и магнитострикционные устройства. Как показано на фиг. 2 входы акустического насоса (волноводов 5 и 6) располагаются не симметрично относительно осевой линии ВВ', так вход 8 анализируемой среды располагается по оси ВВ', а вход 7 опорной среды на удалении, как в осевом, так и в перпендикулярном к нему направлении. Смысл этого будет показан ниже.
Способ применения заключается в использовании заявленного устройства в составе систем контроля герметичности, как показано на фиг. 2. При этом, в процессе проведения испытаний объекта контроля на герметичность, с заполнением его контрольной средой под давлением отличающейся по физическим свойствам (скорости звука и коэффициенту затухания акустических колебаний) от опорной среды, окружающей объект контроля, устройство (акустический детектор текучей среды) располагается со стороны пробной среды, таким образом, что вход 8 анализируемой среды располагается в непосредственной близости (на минимально-возможном расстоянии) от объекта контроля.
В процессе сканирования (в случае обнаружения места течи в объекте контроля), вход 8 располагается на расстоянии r1 от объекта контроля, а вход 7 опорной среды на удалении r2 от объекта контроля, обеспечивающем максимальную разность концентраций контрольной среды в опорной среде, которая достигается за счет естественной диффузии (уравнение 1):

где J - вектор плотности диффузионного потока; D - коэффициент диффузии; с - концентрация вещества; grad - градиент поля концентрации. Знак "минус" указывает на направление потока от больших концентраций к меньшим.
При одномерной диффузии в двухкомпонентной системе выражение для диффузионного потока одного из компонентов уравнение 1 (уравнение Фика) принимает вид:

где J1 - вектор плотности диффузионного потока; с1+с2=const - сумма концентраций опорной и анализируемой среды, D12=D21 - коэффициент взаимной диффузии обоих компонентов.
Надо отметить, что для способа применения заявленного устройства, в целях обеспечения высокой чувствительности (принимая во внимание фиг. 3а и 3б), в конструктивной схеме акустического детектора текучей среды должны соблюдаться ряд условий:



Т.е. расстояние от точки входа анализируемой среды до предполагаемого места течи в осевом направлении (направлении градиента или вектора уменьшения поля концентрации контрольной среды в опорной), должно быть меньше расстояния от точки входа опорной среды до предполагаемого места течи. Еще одним условием обеспечения высокой чувствительности способа применения заявленного устройства, является то, что диаметр (или наибольший линейный размер входа опорной среды в плоскости ЖЖ'- ИИ', показанный на фиг. 3а) волноводов меньше 1 мм. Что также проиллюстрировано графиком (фиг. 3б). При этом надо понимать, что градиент концентрации контрольной среды в опорной среде в плоскости ДД' ЕЕ', а также в плоскости ЖЖ' ГГ' подчиняется уравнению 2, а график изменения иллюстрируется фиг. 3б. Также условием обеспечения высокого уровня чувствительности является то, что диаметры волноводов выбираются исходя из условия определенного формулой 4.
В процессе реализации заявленного способа калибровка может быть осуществлена посредством применения контрольных течей текучей среды (например, [8]). При этом в начальный момент контроля, перед сканированием испытуемой поверхности вход 8 (фиг. 2) анализируемой среды располагается в непосредственной близости (на минимально-возможном расстоянии) от контрольной течи контрольной среды, значение полученного рассогласования является базовым для проведения контроля и определяет нижний порог чувствительности способа контроля герметичности.
В процессе прокачки текучей среды через волноводы, на вход 8 волновода анализируемой среды поступает бинарная среда представляющая собой смесь опорной среды и контрольной среды с концентрацией контрольной среды превышающей концентрацию, попадающую во вход 7 опорной среды (как было показано выше). Физические свойства опорной и анализируемой среды могут быть рассчитаны по уравнению аддитивному относительно скорости звука:

где с1, с2, …, сn - концентрации компонентов в долях единицы; Vзв1, Vзв2, …, Vзвn - скорости звука в компонентах.
Скорость звука в некоторых газах и парах при давлении 98,1 кПа указана в таблице №1.
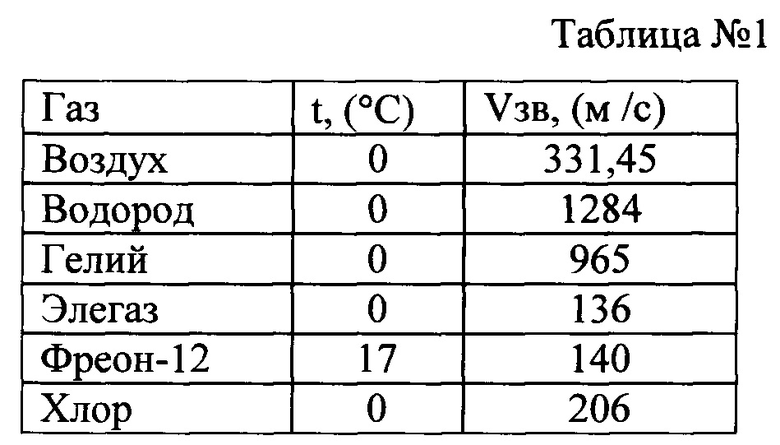
Для способа применения в процессе контроля герметичности акустический детектор текучей среды может быть использован для контроля бинарных и квазибинарных пробных текучих сред, для которых соотношение (6) может быть приведено к виду:

где Vзв2 - скорость звука в перекачиваемой текучей среде по каналу сравнения 5 (фиг. 4); с2 - объемная доля газового компонента (пробной среды выходящей из течи); Vзвon - средняя скорость звука в сумме неопределяемых компонентов в опорной среде.
Как следует из уравнения (7), для бинарной газовой смеси скорость звука в ней - однозначный критерий наличия контрольной среды в опорной среде, в случае использования контрольный среды со скоростью звука отличающейся от опорной.
Для способа применения, акустический детектор текучей среды может представлять из себя одноканальную (параметрическую) и дифференциальную схемы. В одноканальном варианте поток текучей среды проходит только один волновод, при этом, значение скорости звука в текучей среде постоянно сравнивается с записанным в память микроконтроллера 19 (фиг. 1) значением (в момент начала работы производится автоматическая калибровка посредством применения контрольной течи текучей среды, в случае его изменения разность записанного и принятого значения является полезной составляющей, которая выводится на устройство визуализации 30 (фиг. 1). При этом частота записи выбирается исходя из условия:

В случае дифференциального детектора, используются два независимых волновода с одинаковым газовым сопротивлением. В этом случае полезной составляющей будет разность изменения скорости звука в одном и другом канале детектора, т.е. оценивается градиент концентрации расхода контрольной среды через место течи.
Приемники акустических колебаний 9 и 10 (фиг. 1) располагающиеся в торцах волноводов регистрируют акустические колебания, генерируемые акустическим насосом, прошедшие по волноводам 5 и 6. По изменению скорости прохождений акустических колебаний по волноводам с анализируемой средой и опорной средой, можно судить о изменении скорости звука в этих средах.
Например, для газов эта формула выглядит так:

где γ - показатель адиабаты: 5/3 для одноатомных газов, 7/5 для двухатомных (и для воздуха), 4/3 для многоатомных; R - универсальная газовая постоянная; Т - абсолютная температура в Кельвинах; М - молярная масса. По порядку величины скорость звука в газах близка к средней скорости теплового движения молекул и в приближении постоянства показателя адиабаты пропорциональна квадратному корню из абсолютной температуры.
Данное обстоятельство накладывает ограничение на расположение входов газа 7 и 8 (фиг. 5) относительно приемников акустических колебаний 9 и 10, расположенные в их торцах фиг. 1. Так, расстояние, представленное на фиг. 5 между осевой линией ИИ' в плоскости АА' ИИ' и приемниками акустических колебаний не должно превышать:

Для уяснения явления поглощения звуковых волн можно воспользоваться известным эмпирическим выражением для коэффициента поглощения звуковой волны (звука) β, который характеризует относительную величину поглощаемой звуковой энергии, приходящейся на единицу длины (1 м). Например, коэффициент поглощения звука в газе и жидкости связан с вязкостью и коэффициентом теплопроводности среды выражением: -

где ƒ - частота; с - скорость звука; η динамический коэффициент вязкости; λ - коэффициент теплопроводности; ξ - вторая вязкость; ρ - плотность среды; Ср и Cν - изобарная и изохорная теплоемкости.
Данное обстоятельство накладывает дополнительные ограничения на информационную составляющую анализируемого сигнала, о чем будет указано ниже.
Для коррекции температуры между анализируемой и опорной средой служат устройства измерения температуры 11 и 12 прокачиваемой среды, располагающиеся в волноводах 5 и 6 (фиг. 1). Производя сравнение изменения скорости звука и коэффициента затухания в анализируемой и опорной средах, а также принимая во внимание уравнение аддитивности, можно судить о наличие или отсутствии течи в объекте контроля, а также о ее местоположении, размерах, величине и характере направленности. При этом, надо понимать, что в волноводах происходит интенсивное перемешивание текучей среды, за счет постоянных акустических колебаний, что накладывает ограничение на выбор размещения устройства измерения температуры 11 и 12 в волноводах, так расстояние в осевом направлении от приемников акустических колебаний 9 и 10 до точки размещения указанных измерителей температуры удовлетворяющее неравенству:

Перечисленные выше зависимости справедливы только в случае обеспечения равенства линейных расходов текучей среды внутри волноводов, что накладывает на конструкцию акустического детектора газов и паров дополнительные ограничения.
Рассмотрим работу устройства более подробно. В результате работы генератора синусоидальных напряжений 1 (фиг. 1) на клеммы 21 (фиг. 2) источника акустического поля 20 (фиг. 2), акустического насоса приходит возбуждающее напряжение U1 с частотой ƒ1=1/Тнас и амплитудой А1 (фиг. 6а). Источник акустических колебаний 20 (фиг. 2) формирует акустическое поле, которое создает разность давлений между входами 7, 8 среды и выходом 4 (фиг. 4, фиг. 5). Генератор опорной частоты 2 (фиг. 1) задает единую точку отсчета времени для генератора синусоидальных напряжений 1 (фиг. 1), АЦП 18 (фиг. 1) и микроконтроллера 19 (фиг. 1). Акустические насосы, которые могут быть применены в устройстве анализатора могут быть разных типов, все они имеют свои достоинства и недостатки, однако их объединяет то, что в качестве рабочего тела используется текучая среда (жидкости, капельные жидкости, газы и пары), а в качестве побудителя расхода - энергия акустических колебаний им формируемых. Так в [9, 10] акустическое поле создается пьезопреобразователем (пьезопреобразователями), а разность давлений между входом и выходом достигается за счет того, что вход располагается в непосредственной близости от пьезоэлектрического вибратора, а выход газа располагающемся в осевом направлении (направлении распространения акустического луча) со стороны акустического поля. При этом геометрия рабочей камеры акустического насоса (поверхности в которой выполнен канал выхода), спрофилирована таким образом, что колебания вибратора обеспечивают четвертьволновой резонанс камеры акустического насоса в осевом направлении, при этом реализуется максимальный уровень разности амплитуд колебаний на входе и выходе, следовательно, и максимальное КПД акустического насоса. Необходимо отметить, что в [10] устройство включает разделенные тонким зазором две опорные поверхности, по меньшей мере, одна из которых связана с рабочими элементами электромеханического вибратора, электрически-связанного с источником ультразвуковых колебаний, в центре одной из поверхностей выполнено отверстие для отвода газа. Данная схема акустического побудителя расхода накладывает дополнительные ограничения на конструкцию акустического детектора текучей среды. Так применение подобной схемы отражено на фиг. 4, при этом, в качестве поверхности рабочей камеры акустического насоса, обеспечивающей  волноводный резонанс возбуждающего напряжения U1 с частотой ƒ1 и амплитудой А1 (фиг. 6а) служит поверхность 23 (фиг. 4), точки соединения волноводов 5 и 6 (фиг. 4) должны располагаться на периферии опорной поверхности относительно осевой линии ВВ', таким образом, что расстояние между волноводами относительно осевой линии ВВ', должно быть больше половины диаметра колеблющейся части электромеханического вибратора 20 (фиг. 4), таким образом должно выполняться условие:
волноводный резонанс возбуждающего напряжения U1 с частотой ƒ1 и амплитудой А1 (фиг. 6а) служит поверхность 23 (фиг. 4), точки соединения волноводов 5 и 6 (фиг. 4) должны располагаться на периферии опорной поверхности относительно осевой линии ВВ', таким образом, что расстояние между волноводами относительно осевой линии ВВ', должно быть больше половины диаметра колеблющейся части электромеханического вибратора 20 (фиг. 4), таким образом должно выполняться условие:

Схема акустического побудителя расхода может не иметь клапанной системы, при этом похожая конструкция реализована в [11]. Реализация данной схемы акустического детектора текучей среды представлена на фиг. 5. Все указанные конструкции реализуют принцип, обеспечения  волноводный резонанс возбуждающего напряжения U1 с частотой ƒ1 и амплитудой А1.
волноводный резонанс возбуждающего напряжения U1 с частотой ƒ1 и амплитудой А1.
Также, акустический детектор текучей среды может включать побудители расхода использующие в своем составе электромеханические вибраторы магнитострикционного типа, а также вибраторы, содержащие в своем составе электромагнитные катушки, при этом напряжение U1, частота ƒ1 и амплитуда А1 питания указанных побудителей расхода может отличаться и определяется особенностями индивидуального устройства.
Работа насоса иллюстрируется временным интервалом t1 (фиг. 6а)
По завершении цикла колебаний обеспечивающих работу акустического насоса, как побудителя расхода (интервала t1 (фиг. 6а)), генератор синусоидальных напряжений 1 (фиг. 1) формирует зондирующий импульс, который подается на клеммы 21 (фиг. 2) источника акустического поля 20 (фиг. 2). Акустический насос 3 (фиг. 1) на клеммы которого приходит возбуждающее напряжение U1 с частотой ƒ2=1/Тзонд и амплитудой А2 (фиг. 6а) формирует акустическое поле зондирующего импульса, которое распространяется по волноводам 5 и 6 (фиг. 1) как перемещающийся в пространстве скачек давления. Зондирующий импульс с частотой ƒ2 и А2, распространяясь по волноводам 5 и 6 (фиг. 1) достигают приемников акустических колебаний 9 и 10 (Фиг. 1). На клеммах приемников акустических колебаний 25 и 26 (фиг. 4) генерируется сигналы напряжений U2 и U3 соответственно (фиг. 6б).
В случае, когда физические свойства опорной среды не отличаются от свойств анализируемой среды время распространения зондирующего импульса в каналах волноводов 5 и 6 одинаково t2=t3. В случае, когда физические свойства анализируемой среды отличаются от свойств опорной среды в сторону уменьшения скорости звука, например присутствия в составе анализируемой среды гелия (опорная среда воздух, пробная среда гелий) время распространения зондирующего импульса в канале волновода 5 будет меньше времени распространения зондирующего импульса в канале волновода 6, t5<t3. По завершении одного периода зондирующего импульса Тзонд процесс работы акустического насоса переходит в режим побудителя расхода. Данный цикл повторяется периодически. Частота посылок зондирующих импульсов, выбирается из условия не менее одной посылки в секунду:

Частота зондирующего импульса выбирается из условия обеспечения условий резонанса (частоты собственных колебаний приемников акустических колебаний).
Также частота зондирующего импульса выбирается из условия близости указанной частоты к 1/4λ, т.е. длинна волноводов:

что обусловлено поглощением звуковой волны (формула 11).
Также частота зондирующего импульса выбирается из условия соответствия приемлемой амплитуды на АЧХ акустического насоса.
Сигналы U2 и U3 с приемников акустических колебаний 9 и 10 поступают на усилители электрических сигналов 13 и 14 соответственно. С выходов усилителей 13 и 14 электрические сигналы поступают на полосовые фильтры 15 и 16 соответственно. Центральная частота фильтрации выбирается из условия ƒц=ƒ2. Отфильтрованные сигналы поступают на 17 (фиг. 1), с выхода которого поочередно подаются на аналого-цифровой преобразователь 18 (фиг. 1). Частота взятия выборок сигнала АЦП ƒв (фиг. 6) выбирается из условия теоремы «Котельникова-Найквиста» [12]:

Выборки сигналов, полученные с АЦП, поступают в память микроконтроллера 19, формируя массивы анализируемых данных. Обозначим массив выборок сигнала в канале с анализируемой средой аn, и массив выборок сигнала в канале с опорной средой bn. Количество выборок N каждого сигнала одинаково и выбирается из условия:

где: L - длина пути, преодолеваемого зондирующим импульсом, ƒв - частота взятия выборок сигнала АЦП, Cmin - минимальная скорость звука в среде, при 100% заполнении которой волновода, данный прибор должен сохранять работоспособность.
Также в памяти микроконтроллера 19 (фиг. 1) хранится массив данных уn длиной K отсчетов, представляющих собой образ зондирующего сигнала (фиг. 7), частота дискретизации которого равна частоте взятия выборок АЦП ƒв. При этом, K выбирают таким образом, чтобы выполнялось неравенство:

Время пробега зондирующего импульса t2, t3 (фиг. 6), в волноводах 5, 6 (фиг. 1) вычисляется следующим образом. Сначала, вычисляются функции взаимной корреляции Ran и Rbn массивов отсчетов принятых сигналов аn и bn с образом зондирующего импульса по формулам [13]:

где: Ran - массив отсчетов функции взаимной корреляции принятого сигнала в канале с анализируемой средой и образа зондирующего импульса; Rbn - функции взаимной корреляции принятого сигнала в канале с опорной средой и образа зондирующего импульса; уn - массив отсчетов образа зондирующего сигнала; аn - массив выборок сигнала в канале с анализируемой средой; bn - массив выборок сигнала в канале с опорной средой; К - количество отсчетов образа зондирующего импульса.
Далее, в полученных массивах отсчетов функций взаимной корреляции Ran и Rbn отыскиваются отсчеты с максимальным значением Ramax и Rbmax. Номера n отсчетов Ramax и Rbmax относительно начала массива соответствуют времени распространения зондирующих импульсов по волноводам анализируемого и опорного каналов соответственно, выраженным в количестве выборок АЦП. Временной сдвиг в секундах вычисляется по формулам:

где: Та - время распространения зондирующего импульса по волноводу с анализируемой средой в секундах; Тb - время распространения зондирующего импульса по волноводу с опорной средой в секундах; n(Ramax) - номер отсчета в массиве значений функции взаимной корреляции анализируемого канала, имеющего максимальную амплитуду; n(Rbmax) - номер отсчета в массиве значений функции взаимной корреляции опорного канала, имеющего максимальную амплитуду; ƒв - частота взятия выборок АЦП.
Амплитуды Аа и Аb принятых зондирующих импульсов в каналах пропорциональны значениям Ramax и Rbmax соответственно:

где h - коэффициент пропорциональности.
Коэффициент пропорциональности h выбирается исходя из амплитуды сигнала, который, в свою очередь, зависит от типа применяемого приемника акустических колебаний.
Далее, вычисляется разность времени распространения ΔT и амплитуд ΔА принятых зондирующих импульсов в анализируемом и опорном каналах:

где ΔT - разность времени распространения зондирующего импульса в волноводах анализируемого и опорного каналов; ΔА - разность амплитуд принятых зондирующих импульсов в волноводах анализируемого и опорного каналов.
Полученные значения ΔT и ΔА служат мерой отклонения физических свойств текучей среды в анализируемом канале по отношению к опорному каналу и являются критериями оценки изменения состава анализируемой среды.
Измеренные значения ΔT и ΔА могут отличаться при различных температурах окружающей среды. Для компенсации температурного воздействия в формулы вычисления Т и А может быть введен температурный коэффициент, величина которого зависит от состава анализируемой текучей среды. Для этого, после нескольких циклов прокачки и запуска зондирующего импульса, на АЦП поочередно подаются сигналы с измерителей температуры анализируемой среды, значения которых сохраняются в памяти микроконтроллера, и согласно которым корректируются получаемые значения.
В случае применения одноканальной схемы разность получаемых значений не вычисляется, а критерием оценки состава анализируемой среды служат измеренные абсолютные значения времени распространения зондирующего импульса Т и принятой его амплитуды А. Далее, полученные значения могут быть скомпенсированы в соответствии с измеренной температурой среды.
Промышленная применимость
Заявленные устройство акустический детектор текучей среды и способ его применения промышленно применимы, т.к. устройство создано из доступных материалов. Способ и устройство могут найти широкий потребительский спрос из-за простоты использования и высокой технологичности при решении особо важных задач при контроле герметичности. Таким образом, техническая задача решена в данной группе изобретений.
Источники литературы
1. US Patent 5,625,140 «Acoustic analysis of gas mixtures»; 73/24.01; 73/597; April 29, 1997.
2. US Patent 5,060,514 «Ultrasonic gas measuring device»; 73/24.01; 73/24.06; October 29, 1991.
3. US Patent 5,537,854 «Acoustic natural gas fuel sensor»; 73/24.01; 123/395; 123/DIG.13; July 23, 1996.
4. US Patent 6,279,378 «Ultrasonic gas analyzer and method to analyze trace gases»; 73/24.01; 73/24.05; 73/24.06; 73/597; August 28, 2001.
5. US Patent 5,581,014 «Method and apparatus for acoustic analysis of binary gas mixtures with continuous self-calibration»; 73/24.01; 331/154; 73/611; December 3, 1996.
6. RU, 2052805 C1, авторское свидетельство, кл. G01N 29/02, 1996.
7. RU, 94025670 A1, авторское свидетельство, кл. G01N 29/02, 1996.
8. RU, 2402003, авторское свидетельство, кл. G01M 3/02, 2009.
9. US 5,525,041 «Momentum transfer pump»; 417/63; 417/322; Jun. 11, 1996.
10. RU, 2121612 C1, авторское свидетельство, кл. F04F 7/00, В05В 17/04, 1998.
11. RU, 2459114, авторское свидетельство, кл. F04В 43/04, 2002.
12. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов: пер. с англ. Зайцева А.Л., Назаренко Э.Г., Теткина Н.Н., под ред. Александрова Ю.Н., Мир, Москва 1978 г.
13. Айфичер Э., Джервис Б. Цифровая обработка сигналов. Практический подход: пер. с англ. Дорошенко И.Ю., Назаренко А.В., под ред. Назаренко А.В., Вильяме, Москва, Санкт-Петербург, Киев 2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля герметичности металлических резервуаров | 2021 |
|
RU2784599C1 |
| Вихреакустический расходомер | 2017 |
|
RU2653776C1 |
| Измеритель скорости звука в жидкой среде | 2023 |
|
RU2808100C1 |
| Эхолот | 2022 |
|
RU2789812C1 |
| ВИХРЕВОЙ РАСХОДОМЕР | 2012 |
|
RU2515129C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2432558C1 |
| Эхолот | 2023 |
|
RU2828233C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СПОСОБ КОНТРОЛЯ СОСТАВА ГАЗОВОЙ СМЕСИ И ЖИДКИХ СРЕД (ВАРИАНТЫ) | 1994 |
|
RU2115116C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |

Группа изобретений относится к метрологии, в частности к средствам контроля текучих сред. Устройство содержит генератор опорной частоты, генератор синусоидальных напряжений, два усилителя, полосовые фильтры, устройство коммутации аналоговых сигналов, аналого-цифровой преобразователь, микроконтроллер, устройство визуализации, устройство управления, акустический насос, содержащий выход текучей среды, конструктивно и акустически связанный с волноводами, содержащими входы газа. Волноводы содержат в своем составе приемники акустических колебаний, расположенные в их торцах. Волноводы содержат в своем составе устройства измерения температуры прокачиваемой текучей среды. В основе способа лежит вычисление функции взаимной корреляции выборок входных сигналов, на основе которой судят о разности скоростей распространения и затухания акустических колебаний в аналитическом канале и канале сравнения, что позволяет локализовать место течи в объекте контроля. Технические результаты - обеспечение минимального времени срабатывания, уменьшение влияния помех в процессе проведения контроля герметичности. 2 н. и 26 з.п. ф-лы, 8 ил., 1 табл.
1. Акустический детектор текучей среды, содержащий:
перекачивающее устройство - акустический насос, использующее в качестве рабочего тела - текучую среду, а в качестве побудителя расхода - энергию акустических колебаний, формируемую одним или более приводами; причем перекачивающее устройство содержит рабочую камеру, которая во время работы вмещает перекачиваемую текучую среду; причем камера имеет, по существу форму цилиндра, ограниченную двумя торцевыми стенками и боковой стенкой; при этом перекачивающее устройство содержит один или более выходов, а также один или более входов, расположенных на заданном расстоянии в камере; причем привода, содержащиеся в рабочей камере во время работы, вызывают колебательное перемещение одной торцевой стенки в направлении, по существу перпендикулярном плоскости другой торцевой стенки, что вызывает радиальные колебания давления текучей среды в камере акустического насоса;
- один или более волноводов, конструктивно и акустически герметично-связанных с рабочей камерой акустического насоса, являющейся по существу входами текучих сред в акустический детектор текучей среды; причем рабочая камера акустического насоса по сути объединяет волноводы, далее объединенная текучая среда из волноводов перекачивается от входов к выходам; причем волноводы содержат в своем составе приемники акустических колебаний, расположенные на заданном расстоянии; причем приемники акустических колебаний служат для регистрации акустических колебаний, генерируемых акустическим насосом; при этом частоты и амплитуды регистрируемых акустических колебаний, распространяющихся в волноводах, по существу являются информативными параметрами сравнения свойств перекачиваемых по волноводам текучих сред;
- измерительное устройство, содержащее генератор синусоидальных напряжений, соединенный с одним или несколькими приводами акустического насоса, по существу являющегося излучателем акустических колебаний, принимаемых приемниками, расположенными в волноводах с фиксированными длинами и диаметрами, и связанных с усилителями электрических сигналов, а также полосовыми фильтрами, сигнал с которых поступает на вход устройства коммутации аналоговых сигналов, преобразуемых аналого-цифровым преобразователем в код; сигнал с выхода аналого-цифрового преобразователя поступает на вход микроконтроллера, и далее после обработки на устройство отображения информации; также содержит устройство управления; кроме того, в составе измерительного устройства также предусмотрены устройства измерения температуры, расположенные в волноводах на заданном расстоянии и необходимые для коррекции информационной составляющей, сигнал с выходов которых также поступает на устройство коммутации аналоговых сигналов, и далее через аналого-цифровой преобразователь на вход микроконтроллера; кроме того, устройство содержит генератор опорной частоты, связанный с генератором синусоидальных напряжений, аналого-цифровым преобразователем и микроконтроллером, задавая единую точку отсчета времени.
2. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в рабочей камере которого выходные отверстия текучей среды располагаются около оси распространения акустического луча, формируемого активными элементами приводов.
3. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в рабочей камере которого любые входные отверстия текучей среды располагаются на удалении от оси распространения акустического луча, которое выбирается из условия формирования разности давлений между входами и выходами насоса, обеспечивающего прокачку текучей среды, и выбирается исходя из условия L3<D, где L3 - расстояние между волноводами относительно осевой линии насоса, D - диаметр колеблющейся части электромеханического вибратора.
4. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в рабочей камере которого входные отверстия текучей среды располагаются на расстоянии от оси распространения акустического луча, обеспечивающем равенство акустического давления формируемого акустическим лучом.
5. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в рабочей камере которого выходные отверстия текучей среды включают клапаны.
6. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в качестве активных элементов приводов которых могут быть использованы электромеханические вибраторы магнитострикционного или пьезокерамического типа или электромагнитные катушки.
7. Акустический детектор текучей среды, содержащий перекачивающее устройство - акустический насос по п. 1, в котором выполнено профилирование торцевых стенок рабочей камеры.
8. Акустический детектор текучей среды по п. 1, содержащий волновод или волноводы, геометрия которых выбирается из условия равенства сопротивления перекачке текучей среды.
9. Акустический детектор текучей среды по п. 1, содержащий волновод или волноводы, геометрия и расположение приемников акустических колебаний которых выбирается исходя из условия обеспечения четвертьволнового резонанса акустических колебаний насоса.
10. Акустический детектор текучей среды по п. 1, содержащий приемники акустических колебаний, в качестве которых могут быть использованы конденсаторные микрофоны, динамические микрофоны, угольные микрофоны и пьезомикрофоны, а также оптоакустические микрофоны и магнитострикционные устройства.
11. Акустический детектор текучей среды по п. 1, содержащий устройства измерения температуры в волноводах, взаимное расположение которых выбирается исходя из условия L4≤L7, где L4 - расстояние между приемниками акустических колебаний и устройствами измерения температуры, расположенными в волноводах, L7 - длина волноводов, соединяющих приемники акустических колебаний и рабочую камеру насоса.
12. Способ измерения параметров текучих сред, используемый при анализе бинарных и многокомпонентных сред, а также при контроле герметичности, для объектов контроля, содержащих контрольную среду с известными свойствами под избыточным давлением относительно опорной среды также с известными свойствами, заключающийся в том, что в процессе анализа текучих сред или проведения контроля герметичности один из волноводов служит аналитическим каналом, а другой - каналом сравнения, при этом входы текучей среды в волноводы акустического детектора располагаются заданным образом относительно объекта контроля, обеспечивая минимальное время срабатывания, при котором обеспечивается попадание максимума концентрации контрольной среды в аналитический канал; при этом колебания, возбуждаемые генератором синусоидальных напряжений, поступают на приводы акустического насоса, таким образом, что колебания, возбуждаемые генератором опорной частоты, могут быть как обеспечивающими работу насоса, так и пачками зондирующих импульсов, далее преобразованные акустические колебания пропускают через текучую среду в волноводах, принимают их на заданном расстоянии приемниками акустических колебаний, преобразуют в электрические сигналы, усиливают, пропускают через полосовые фильтры и подают через устройство коммутации аналоговых сигналов на аналогово-цифровой преобразователь (АЦП), после чего полученный код подается в микроконтроллер, формируя массивы выборок входного сигнала, при этом микроконтроллер содержит массив отсчетов образа зондирующего импульса, по функции взаимной корреляции которого с массивами выборок входных сигналов судят о разности скоростей распространения и затуханиях акустических колебаний в аналитическом канале и канале сравнения; в результате совокупность полученных информационных параметров позволяет локализовать место течи в объекте контроля, при этом сравнение табличных значений скоростей звука и коэффициентов затухания, записанных в памяти микроконтроллера для различных текучих сред с вычисленными значениями позволяет преодолеть влияние помех в процессе проведения контроля герметичности.
13. Способ измерения параметров текучих сред по п. 14, при котором в детекторе текучей среды используется один волновод, как канал сравнения.
14. Способ измерения параметров текучих сред по п. 14, при котором частота запись в память микроконтроллера данных о характере прокачиваемой текучей среды выбирается исходя из условия ƒзап≥1 Гц, где ƒзап - частота записи.
15. Способ измерения параметров текучих сред по п. 14, в процессе которого расстояние между входами текучей среды в волноводы акустического детектора и предполагаемым местом течи в направлении градиента поля концентрации контрольной среды в опорной выбирается исходя из условия r1<r2, где r1 - расстояние между точкой входа анализируемой среды в волновод аналитического канала и местом течи, r2 - расстояние между точкой входа анализируемой среды в волновод канала сравнения и местом течи. При этом входы газа в волноводы акустического детектора располагаются заданным образом относительно объекта контроля, обеспечивая минимальное время срабатывания.
16. Способ измерения параметров текучих сред по п. 14, в процессе которого калибровка способа осуществляется посредством применения контрольных течей текучей анализируемой среды.
17. Способ измерения параметров текучих сред по п. 14, при котором частота посылок зондирующих импульсов выбирается из условия обеспечения в волноводах требуемого линейного расхода текучей среды при работе акустического насоса и должна соответствовать выражению ƒзонд≥1 Гц, где ƒзонд - частота посылок зондирующих импульсов.
18. Способ измерения параметров текучих сред по п. 14, при котором частота зондирующих импульсов выбирается из условия L≈1/4λ, где L - длина волновода, по которому распространяется зондирующий импульс, λ - длина волны зондирующего импульса.
19. Способ измерения параметров текучих сред по п. 14, при котором частота зондирующих импульсов выбирается исходя из условия близости к одной из резонансных частот системы, объединяющей акустический насос, волновод или волноводы с приемниками акустических колебаний.
20. Способ измерения параметров текучих сред по п. 14, при котором скорость звука в анализируемой среде рассчитывается по формуле

где Vзв2 - скорость звука в перекачиваемой текучей среде в волноводе канала сравнения; c2 - объемная доля газового компонента пробной среды, выходящей из течи; Vзвon - средняя скорость звука в сумме неопределяемых компонентов в опорной среде.
21. Способ измерения параметров текучих сред по п. 14, при котором количество выборок каждого сигнала одинаково и выбирается по формуле
 ,
,
где N - количество выборок сигнала; L - длина пути, преодолеваемого зондирующим импульсом, ƒв - частота взятия выборок сигнала АЦП, Cmin - минимальная скорость звука в среде, прокачиваемой через волноводы.
22. Способ измерения параметров текучих сред по п. 14, при котором в микроконтроллере хранится массив данных уn длиной K отсчетов, представляющих собой образ зондирующего импульса, с частотой дискретизации, равной частоте взятия выборок аналого-цифрового преобразователя ƒв.
23. Способ измерения параметров текучих сред по п. 14, при котором количество отсчетов образа зондирующего импульса K должно быть меньше или равно количеству выборок сигнала N.
24. Способ измерения параметров текучих сред по п. 14, при котором время пробега зондирующего импульса в волноводах вычисляется с помощью функции взаимной корреляции Ran и Rbn по формулам
где Ran - массив отсчетов функции взаимной корреляции принятого сигнала в канале с анализируемой средой и образа зондирующего импульса; Rbn - функции взаимной корреляции принятого сигнала в канале с опорной средой и образа зондирующего импульса; уn - массив отсчетов образа зондирующего сигнала; аn - массив выборок сигнала в канале с анализируемой средой; bn - массив выборок сигнала в канале с опорной средой; K - количество отсчетов образа зондирующего импульса.
25. Способ измерения параметров текучих сред по п. 14, при котором временной сдвиг в секундах вычисляется по формулам
где Та - время распространения зондирующего импульса по волноводу с анализируемой средой в секундах; Тb - время распространения зондирующего импульса по волноводу с опорной средой в секундах; n(Ramax) - номер отсчета в массиве значений функции взаимной корреляции анализируемого канала, имеющего максимальную амплитуду; n(Rbmax) - номер отсчета в массиве значений функции взаимной корреляции опорного канала, имеющего максимальную амплитуду; ƒв - частота взятия выборок
26. Способ измерения параметров текучих сред по п. 14, при котором амплитуды Аа и Аb принятых зондирующих импульсов в каналах пропорциональны максимальным значениям функций взаимной корреляции Ramax и Rbmax соответственно и вычисляется по формулам
где Аа, Аb - амплитуды принятых зондирующих импульсов; h - коэффициент пропорциональности; Ramax - максимальная величина в массиве значений функции взаимной корреляции анализируемого канала; Rbmax - максимальная величина в массиве значений функции взаимной корреляции опорного канала.
27. Способ измерения параметров текучих сред по п. 14, при котором место течи в объекте контроля локализуется исходя из условия нахождения максимальных значений ΔT и ΔА вычисленных по формулам
где ΔT - разность времени распространения зондирующего импульса в волноводах анализируемого и опорного каналов; ΔА - разность амплитуд принятых зондирующих импульсов в волноводах анализируемого и опорного каналов; Та - время распространения зондирующего импульса в волноводе анализируемого канала; Тb - время распространения зондирующего импульса в волноводе опорного канала; Аа, Аb - амплитуды принятых зондирующих импульсов.
28. Способ измерения параметров текучих сред по п. 14, при котором генератор опорной частоты связан с генератором синусоидальных напряжений, АЦП и микроконтроллером, задавая, таким образом, единую точку отсчета времени для генерации сигналов, взятия выборок АЦП, и вычислений, производимых с массивами выборок в микроконтроллере.
| RU 2052805 C1, 20.01.1996 | |||
| Сумкин Павел Сергеевич ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ОПАСНЫХ ПРОИЗВОДСТВЕННЫХ ОБЪЕКТОВ //Автореферат диссертации | |||
| Московский государственный университет приборостроения и информатики, 2012 (стр | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Машина для мытья посуды | 1930 |
|
SU24564A1 |
| СПОСОБ КОНТРОЛЯ СОСТАВА ГАЗОВОЙ СМЕСИ И ЖИДКИХ СРЕД (ВАРИАНТЫ) | 1994 |
|
RU2115116C1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МНОГОКОМПОНЕНТНОГО СОСТАВА И ПРОЦЕСС ТЕКУЩЕГО КОНТРОЛЯ, ИСПОЛЬЗУЮЩИЙ ИЗМЕРЕНИЯ ПОЛНОГО СОПРОТИВЛЕНИЯ | 1989 |
|
RU2122722C1 |
| Кабельный кран | 1937 |
|
SU57467A1 |
| Навалочная машина на гусеничном ходу | 1936 |
|
SU56637A1 |
| US 5789676 A1, 04.08.1998 | |||
| US 5625140 A1, 29.04.1997 | |||
| Способ подготовки корне- и клубнеплодов к переработке | 1990 |
|
SU1761104A1 |
| US 20140109684 A1, 24.04.2014 | |||
| US 20040025576 A1, 12.02.2004 | |||
| WO 2009075704 A2, 18.06.2009 | |||
| US 7683525 B2, 23.03.2010 | |||
| US 6520001 B2, 18.02.2003. | |||

