Предлагаемое изобретение относится к приводам машущих летательных аппаратов.
Известен «Летательный аппарат» (патент РФ №2138424, В64С 33/02, 1999 г.), в котором в качестве энергетической установки применен сжатый воздух. При помощи пневмо-поршневой системы и при помощи гибкой связи (тяги) через систему роликов осуществляются машущие движения крыльев, которые управляются вручную, то есть угловая величина и частота маха каждого крыла зависит от энергичности рук человека, находящегося в махолете.
Недостаток: управление частотой маха каждого крыла в отдельности вручную в полете недопустимо, так как малейшая рассинхронизация работы крыльев приведет к аварии.
Наиболее близким аналогом, принятым в качестве прототипа, является «Махолет» (патент РФ №2007338 В64С 33/00, 1994 г.). В этом аппарате применен двигатель, нагнетающий посредством насоса давление в пневмоцилиндры, которые обеспечивают колебательные движения каждого крыла в отдельности, то есть каждое крыло имеет свой колебательный пневмоцилиндр, а также предусмотрена возможность поворота крыльев для изменения угла атаки.
Недостаток: основным недостатком является отсутствие механической синхронизации махов обоих крыльев, которую в данном аппарате применить затруднительно, так как при изменении угловой амплитуды маха одного из крыльев при помощи пневмосистемы, а это необходимо при маневрировании по крену, частота махов (колебаний) этого крыла при неизменном давлении в пневмосистеме изменится, а другое крыло будет работать в прежнем режиме.
Рассогласование работы крыльев налицо - аварии не избежать.
Задача, на решение которой направлено предлагаемое изобретение, состоит в создании такого привода махолета, с помощью которого махолет сможет маневрировать в воздухе, как птица, то есть может маневрировать как по тангажу, так и по крену, без рассогласования работы крыльев по частоте.
Для достижения технического результата в универсальном приводе махолета с двигателем и с крыльями, жестко закрепленными на рамках, каждая рамка с крылом имеет две регулируемые степени свободы и расположена напротив конца основного вала, одна из регулируемых степеней свободы рамки предназначена для поворота плоскости маха крыла вокруг оси основного вала и вокруг шарниров корпуса махолета, так как рамка своими соосными полуосями расположена симметрично оси основного вала и шарнирно соединена с внешними концами соответствующей рамы, жестко соединенной с соответствующим кожухом, который, в свою очередь, шарнирно соединен с корпусом аппарата, а регулирование угла атаки крыла осуществляется поворотом соответствующей рамы вокруг шарниров основного вала и вокруг шарниров корпуса махолета, другая же регулируемая степень свободы рамки предназначена для колебания крыла вокруг внешних концевых шарниров соответствующей рамы, а угловая амплитуда маха крыла определяется углом раствора конуса, описываемого водилом, которое одним концом жестко и ортогонально закреплено с серединой малой оси, шарнирно соединенной с противоположными стенками рамки и расположенной симметрично соосным полуосям, находящимся на боковых сторонах самой рамки, и оси основного вала, а другим концом водило приводится в круговое движение ползунковой штангой, шарнирно соединенной посредством промежуточного рычага с водилом, а сама ползунковая штанга, вращаясь вместе с основным валом, имеет возможность при помощи рычага, установленного на соответствующей раме, выдвигаться по осевой линии из полости основного вала и кожуха для изменения угла раствора конуса водила, то есть для изменения величины угловой амплитуды маха крыла.
Такими образом, в предложенном приводе махолета каждое крыло имеет свое управление как по тангажу (изменению угла атаки крыла), так и по крену (изменению угловой амплитуды маха крыла), при единой частоте колебания крыльев, так как единым источником, осуществляющим вращательные и колебательные действия, является основной вал, который гарантирует синхронизацию работы крыльев при любом маневрировании махолета.
В прототипе как бы предусмотрена система управления каждым крылом в отдельности, но при изменении угловой амплитуды маха одного из крыльев изменится и частота маха этого крыла, а другое крыло будет работать в прежнем режиме, то есть с прежней частотой, что недопустимо, потому что рассинхронизация работы крыльев в полете приведет к аварии.
Признаки, отличающие предложенный универсальный привод махолета от наиболее близкого к нему прототипа: это единый синхронизирующий вал обоих крыльев, система управления угловой амплитудой каждого крыла в отдельности и отсутствие пневматики.
На фиг.1 схематически изображена кинематика привода махолета с крыльями (частично изображенными), поднятыми вверх, штрихпунктирными линиями изображены пределы колебания крыльев.
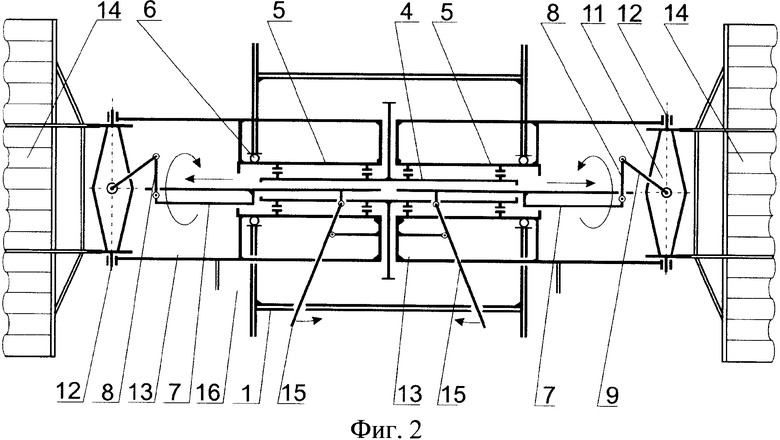
На фиг.2 схематически изображена кинематика привода махолета в плане, где крылья установлены горизонтально, а ползунковая штанга находится в частично задвинутом в основной вал и кожух положении при ортогональном положении промежуточного рычага к оси основного вала и ползунковой штанги.
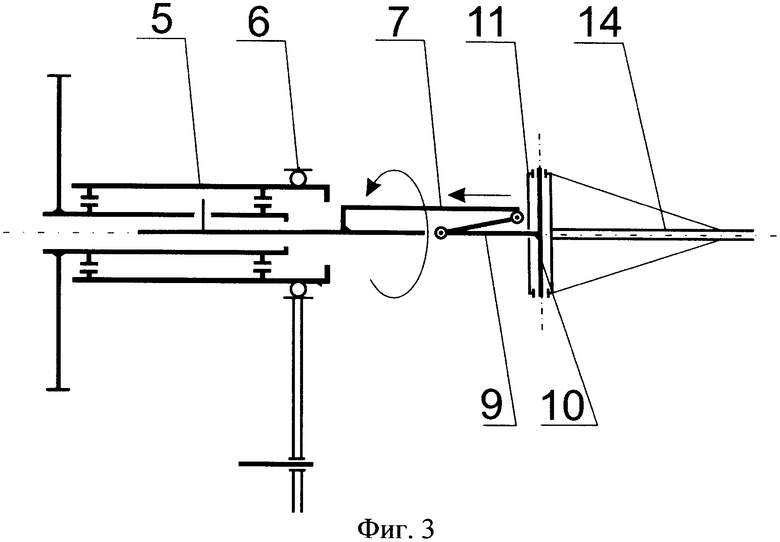
На Фиг.3 также схематически изображена кинематика привода махолета с горизонтальным расположением крыла (частично изображенным), где промежуточный рычаг и водило полностью вошли в концевую полость ползунковой штанги.
Универсальный привод махолета с сопутствующими узлами согласно схематическому изображению содержит двигатель 2, установленный в корпусе 1, кинематически соединенный с промежуточным валом 3, который, в свою очередь, кинематически соединен с основным валом 4, находящимся внутри двух разделенных цилиндрических кожухов 5, которые через наружные шарниры 6 связаны с корпусом 1, и в то же время каждый кожух 5 жестко соединен с соответствующей рамой 13, которая шарнирно соединена с рамкой 11, к которой жестко крепится крыло 14, через посредство двух наружных концевых шарниров самой рамы 13 и двух полуосей 12, расположенных соосно на боковых сторонах рамки 11 с крылом 14, в результате этого каждая рамка 11 с крылом 14 имеет две регулируемые степени свободы и расположена напротив конца основного вала 4, одна из регулируемых степеней свободы рамки 11 предназначена для поворота плоскости маха крыла 14 вокруг оси основного вала 4 и вокруг шарниров 6 корпуса 1 махолета, другая же регулируемая степень свободы рамки 11 предназначена для колебания крыла 14 вокруг внешних концевых шарниров соответствующей рамы 13 при помощи водила 9, которое одним концом жестко и ортогонально закреплено с серединой малой оси 10, шарнирно соединенной с противоположными стенками рамки 11 и расположенной симметрично соосным полуосям 12, находящимся на боковых сторонах рамки 11, состоящей из четырехсторонней конструкции, а другим концом водило 9 приводится в круговое движение ползунковой штангой 7, которая, находясь частично в концевой полости основного вала 4 и имея радиальное соединение с основным валом 4, имеет возможность осевого перемещения для изменения угловой величины конуса, описываемого водилом 9, через посредство промежуточного рычага 8, шарнирно соединенного и с ползунковой штангой 7, и с водилом 9, а для управления угловой амплитудой маха каждого крыла 14 предусмотрен рычаг 15, шарнирно соединенный с рамой 13 и с ползунковой штангой 7, а для изменения угла атаки крыла 14, жестко соединенного с рамкой 11, на раме 13 установлена рукоятка 16 для поворота рамы 13 вместе с рамкой 11 и крылом 14.
На фиг.1 схематически-кинематически изображен привод махолета с сопутствующими необходимыми узлами: с крыльями 14 (крылья полностью не показаны), с двигателем 2 и с корпусом 1, где видно, что корпус 1, в котором установлен двигатель 2, представляет собой пространственную конструкцию (фиг.1, фиг.2), выполненную из трубчатого материала (металл, пластмасса), а основной вал 4, ползунковая штанга 7, промежуточный рычаг 8 и водило 9 выполнены из легированной стали, а кожух 5, рама 13 и рамка 11 - из легкого металла, например из алюминиевых сплавов, шарнир 6, как и все шарниры, примененные в приводе, является подшипником качения.
На фиг.2 кинематически изображена вся схема привода махолета с крыльями (частично показанными) в плане, в которой водило 9 находится в максимальном отклонении от осевой линии основного вала 4, потому что промежуточный рычаг 8 находится в ортогональном положении к осевой линии основного вала 4, а ползунковая штанга 7 занимает такое рабочее положение, которое определяет максимальную угловую амплитуду маха крыла 14, находясь в задвинутом положении концевой полости основного вала 4 и кожуха 5, а маленькой стрелкой у головной части ползунковой штанги 7 показано направление перемещения ее для уменьшения угла между водилом 9 и осевой линией основного вала 4. Это перемещение предусмотрено для того, чтобы от максимальной угловой амплитуды маха крыла 14 можно было ее уменьшить до нуля градусов (фиг.3) и вовремя полета при помощи рычага 15, который шарнирно соединен с ползунковой штангой 7 и шарнирно установлен на соответствующей раме 13. Водило 9 (фиг.1, 2, 3) занимает разные положения: на фиг.1 крылья подняты - водило 9 занимает максимальное положение, то есть угол между водилом 9 и осевой линией основного вала 4 - максимальный, а фиг.2 вид в плане - отклонение водила 9 от осевой линии основного вала 4 такое же, как и на фиг.1, но в этот момент крыло 14 занимает горизонтальное положение, такое же положение крыло 14 займет, если ползунковая штанга 7 будет выдвинута рычагом 15 в крайнее положение в сторону крыла, в этот момент водило 9 займет нулевое положение, то есть соосно с основным валом 4, войдя в концевую полость ползунковой штанги 7. На фиг.3 показано, что промежуточный рычаг 8 и водило 9 полностью вошли в концевую полость ползунковой штанги 7, это значит, что угловая амплитуда маха крыла равна нулю градусов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОЛЕТ | 2002 |
|
RU2266238C2 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| АВТОМАТИЧЕСКИЙ ПЛАСТИНЧАТЫЙ ГИДРОМОТОР ШАШКИНА | 1996 |
|
RU2111380C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| УПРАВЛЯЕМОЕ КРЫЛО ПРОПЕЛЛЕРНОГО ТИПА | 2015 |
|
RU2583426C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОЛЕТ | 2012 |
|
RU2488525C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
Изобретение относится к летательным аппаратам, в частности к махолетам. Универсальный привод махолета содержит двигатель, установленный в корпусе, кинематически соединенный с промежуточным валом. Промежуточный вал кинематически соединен с основным валом, находящимся внутри двух разделенных цилиндрических кожухов, которые через наружные шарниры связаны с корпусом. Внутри каждого конца основного вала находится ползунковая штанга, которая может из полости основного вала и кожуха выдвигаться в сторону рамки с крылом. Выдвижение осуществляется посредством промежуточного рычага, шарнирно соединенного с ползунковой штангой и водилом. На боковых концах рамки расположены консолью наружу и соосно две полуоси, которые шарнирно соединены с внешними концами рамы, жестко соединенной с соответствующим кожухом основного вала. Для управления угловой амплитудой крыла предусмотрен рычаг, шарнирно соединенный с рамой и ползунковой штангой, а для изменения угла атаки крыла на раме установлена рукоятка для поворота рамы вместе с рамкой и крылом. Решение направлено на обеспечение работы махолета без рассогласования работы крыльев по частоте. 3 ил.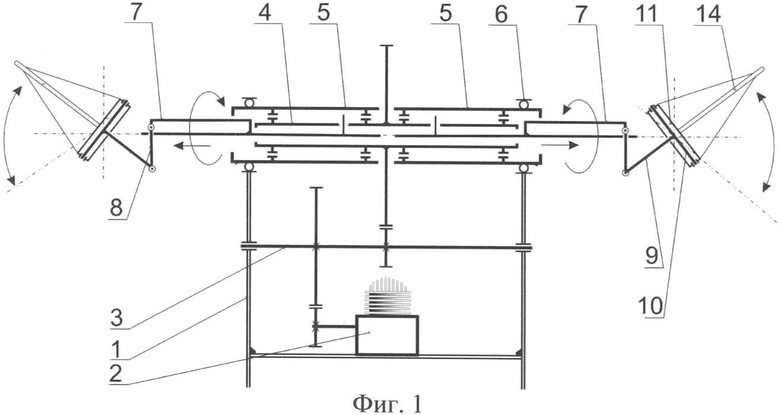
Универсальный привод махолета с двигателем и с крыльями, жестко закрепленными на рамках, отличающийся тем, что каждая рамка с крылом имеет две регулируемые степени свободы и расположена напротив конца основного вала, одна из регулируемых степеней свободы рамки предназначена для поворота плоскости маха крыла вокруг оси основного вала и вокруг шарниров корпуса махолета, так как рамка своими соосными полуосями расположена симметрично оси основного вала и шарнирно соединена с внешними концами соответствующей рамы, жестко соединенной с соответствующим кожухом, который, в свою очередь, шарнирно соединен с корпусом аппарата, а регулирование угла атаки крыла осуществляется поворотом соответствующей рамы вокруг шарниров основного вала и вокруг шарниров корпуса махолета; другая же регулируемая степень свободы рамки предназначена для колебания крыла вокруг внешних концевых шарниров соответствующей рамы, а угловая амплитуда маха крыла определяется углом раствора конуса, описываемого водилом, которое одним концом жестко и ортогонально закреплено с серединой малой оси, шарнирно соединенной с противоположными стенками рамки и расположенной симметрично соосным полуосям, находящимся с боковых сторон самой рамки, и оси основного вала, а другим концом водило приводится в круговое движение ползунковой штангой, шарнирно соединенной посредством промежуточного рычага с водилом, а сама ползунковая штанга, вращаясь вместе с основным валом, имеет возможность при помощи рычага, установленного на соответствующей раме, выдвигаться по осевой линии из полости основного вала и кожуха для изменения угла раствора конуса водила, т.е. для изменения величины угловой амплитуды маха крыла.
| SU 1728086 A1, 23.04.1992 | |||
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| Модель летательного аппарата | 1990 |
|
SU1818274A1 |
| 0 |
|
SU316717A1 | |
| УСТРОЙСТВО для МОЙКИ ИЗДЕЛИЙБЧ5/;И9ТЕКА | 0 |
|
SU322183A1 |

