Изобретение относится к авиации, в частности к орнитоптерам (махолетам).
Наиболее близким аналогом является «УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ» (патент РФ №2350509 B64C 33/00, B64C 33/02, A63H 27/18 2007 г.), содержащее корпус, несущий связанные с приводом тандемно расположенные крылья.
Однако известное устройство не может быть практически использовано из-за плохой аэродинамики и неэффективной конструкции.
Технический результат, на достижение которого направлено изобретение, заключается в реализации машущего полета как в малых, так и в больших масштабах с эффективным созданием тяги и подъемной силы, необходимых для полета, а также с эффективным управлением за счет разности сил и моментов, возникающих на крыльях. Исключение вибраций и колебаний, недопустимых для человека.
Указанный технический результат достигается тем, что в махолете, содержащем корпус, несущий связанные с приводом тандемно расположенные крылья, каждая консоль крыльев закреплена на корпусе с возможностью поворота вокруг продольной и поперечной осей, соединена с приводом и снабжена механизмом изменения угла атаки и механизмом регулирования амплитуды поворота относительно поперечной оси.
Привод включает в себя силовую установку, посредством продольного вала соединенную с синхронизирующими редукторами, которые через кривошипно-шатунные механизмы соединены с соответствующими консолями крыльев.
В другом варианте привод может быть выполнен гидравлическим и включает в себя гидроцилиндры, соединенные с соответствующими консолями крыльев и с системой управления.
Корпус для облегчения конструкции может быть выполнен в виде пространственной стержневой фермы, состоящей из верхней продольной трубы, нижней плоской рамы и соединяющей их стержневой системы.
Механизм изменения угла атаки консоли крыла может включать в себя жестко закрепленный на поперечной оси кронштейн, соединенный с приводом, закрепленным на кронштейне, соединенном с продольной осью с возможностью поворота.
Механизм регулирования амплитуды поворота консоли крыла относительно поперечной оси может включать в себя приводные рычаги с упорами, шарнирно-соединенные с жестко закрепленным на поперечной оси кронштейном с возможностью взаимодействия с упором консоли крыла, при этом упоры рычагов могут быть выполнены в виде демпферов.
Сущность изобретения поясняется чертежами.
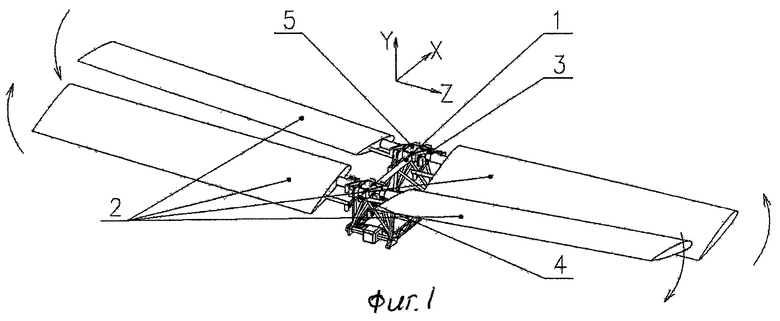
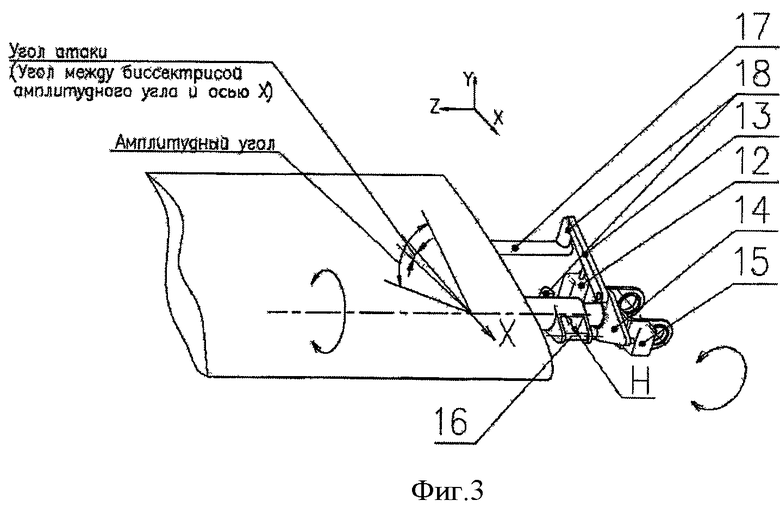
На фиг.1 схематично показан общий вид махолета; на фиг.2 - конструкция корпуса и его взаимосвязь с механизмами махолета; на фиг.3 - узел крепления консоли крыла.
Махолет имеет жесткий корпус 1, выполненный в виде пространственной стержневой фермы, четыре консоли 2 крыльев, установленных тандемно, при этом каждое крыло имеет систему регулировки 3 по двум основным углам. Ферму можно разделить на три элемента.
1. Верхняя труба 4, являющаяся опорой для кронштейнов крыла 5.
2. Нижняя плоская рама, являющаяся опорой для силовой установки 6 и возвратно-поступательного привода.
3. И соединяющая их пространственная стержневая система.
Каждое жесткое крыло имеет две оси поворота (фиг.3) (относительно оси z и относительно оси x), что позволяет крылу совершать колебательные движения по амплитуде, а так же менять угол атаки крыла в процессе маха.
Для инерционной и аэродинамической сбалансированности конструкция имеет четыре консоли, двигающихся попарно в противофазе.
Каждое крыло управляется отдельно по двум основным углам: углу амплитуды и углу атаки (или углу разности амплитуды). Изменение угла осуществляется за счет смещения оси возвратно-поступательного привода относительно оси z крыла.
В качестве возвратно-поступательного привода можно использовать как кривошипно-шатунный привод, так и гидравлический.
В случае использования механического привода валы 7 соединены с продольным валом 8. Крылья соединены с шатунами 9. Редукторы 10, соединенные с продольным валом 8, используются для синхронизации кривошипов 11.
Таким образом, при вращении валов в каждый момент времени пары консолей движутся асинхронно.
Если использовать гидравлический привод, то в качестве толкателя будет использоваться не шатун, а шток гидроцилиндра. Асинхронность работы крыльев при этом будет осуществляется с помощью системы управления гидроцилиндрами.
По углу амплитуды крыло регулируется с помощью регулируемых приводом 12 упоров 13, по углу атаки - с помощью поворотного кронштейна 14 с приводом 15. Каждое крыло соединено с приводом посредством кронштейна 16. Управление характерными углами, а следовательно, аэродинамическими характеристиками привода, осуществляется с помощью приводов 12 и 15. Конструкция махолета позволяет создавать подъемную силу и тягу в широком диапазоне значений и регулировок.
В конечных точках траектории происходит переворот крыла за счет смещенной оси на величину H. С помощью ударника 17 крыло фиксируется на упоре 13, поворачиваясь на заданный упором угол. После переворота крыло начинает следующую фазу маха. Для уменьшения ударных нагрузок при перевороте на кронштейнах закреплены демпферы 18. Изменяя угол раскрыва упоров с помощью привода 12, изменяется амплитудный угол крыльев. Изменяя положение поворотного кронштейна рычагов 14 с помощью привода 15, изменяется угол атаки.
В качестве приводов для изменения положения рычагов можно использовать как электрические, так и гидравлические приводы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| МАХОЛЕТ | 2003 |
|
RU2255026C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2007 |
|
RU2350509C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| МАХОЛЕТ | 2001 |
|
RU2222476C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
Изобретение относится к авиации, в частности к конструкциям махолетов. Махолет содержит корпус, несущий связанные с приводом тандемно расположенные крылья. Каждая консоль крыльев закреплена на корпусе с возможностью поворота вокруг продольной и поперечной осей, соединена с приводом и снабжена механизмом изменения угла атаки и механизмом регулирования амплитуды поворота относительно поперечной оси. Привод включает в себя силовую установку, соединенную с синхронизирующими редукторами, которые через кривошипно-шатунный механизм соединены с соответствующими консолями. Привод выполнен гидравлическим и включает гидроцилиндры, соединенные с консолями крыльев и системой управления. Корпус махолета выполнен в виде пространственной стержневой системы. Механизм изменения угла атаки консоли крыла содержит жестко закрепленный на поперечной оси кронштейн, соединенный с приводом. Механизм регулирования амплитуды поворота крыла относительно поперечной оси включает в себя приводные рычаги с упорами, шарнирно-соединенные с жестко закрепленным на поперечной оси кронштейном с возможностью взаимодействия с упором консоли крыла. Упоры рычагов выполнены в виде демпферов. Повышается эффективность создания тяги и управления махолетом. 7 з.g. ф-лы, 3 ил.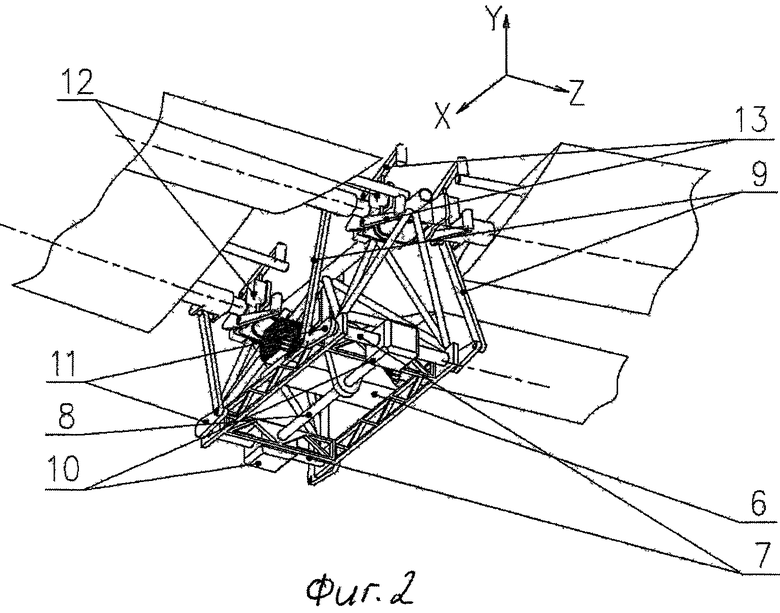
1. Махолет, содержащий корпус, несущий связанные с приводом тандемно расположенные крылья, отличающийся тем, что каждая консоль крыльев закреплена на корпусе с возможностью поворота вокруг продольной и поперечной осей, соединена с приводом и снабжена механизмом изменения угла атаки и механизмом регулирования амплитуды поворота относительно поперечной оси.
2. Махолет по п.1, отличающийся тем, что привод включает в себя силовую установку, посредством продольного вала соединенную с синхронизирующими редукторами, которые через кривошипно-шатунные механизмы соединены с соответствующими консолями крыльев.
3. Махолет по п.1, отличающийся тем, что привод выполнен гидравлическим и включает в себя гидроцилиндры, соединенные с соответствующими консолями крыльев и с системой управления.
4. Махолет по п.1, отличающийся тем, что корпус выполнен в виде пространственной стержневой фермы.
5. Махолет по п.4, отличающийся тем, что пространственная стержневая ферма состоит из верхней продольной трубы, нижней плоской рамы и соединяющей их стержневой системы.
6. Махолет по любому из пп.1-5, отличающийся тем, что механизм изменения угла атаки консоли крыла включает в себя жестко закрепленный на поперечной оси кронштейн, соединенный с приводом, закрепленным на кронштейне, соединенном с продольной осью с возможностью поворота.
7. Махолет по п.6, отличающийся тем, что механизм регулирования амплитуды поворота консоли крыла относительно поперечной оси включает в себя приводные рычаги с упорами, шарнирно соединенные с жестко закрепленным на поперечной оси кронштейном с возможностью взаимодействия с упором консоли крыла.
8. Махолет по п.7, отличающийся тем, что упоры рычагов выполнены в виде демпферов.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ИСПОЛЬЗОВАНИЕМ МАШУЩИХ КРЫЛЬЕВ ("СТРЕКОЗА") | 2008 |
|
RU2375253C1 |
| US 20080272231 A1, 06.11.2008 | |||
| US 7963478 B2, 21.06.2011 | |||
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |

