Изобретение относится к горной промышленности, в особенности к шахтным подъемным устройствам с гидравлическим приводом, и может быть использовано для доставки грузов по вертикальным и крутонаклонным стволам или другим горным выработкам угольной и горнорудной промышленности.
Известна конструкция подъемного устройства, использующая для перемещения грузов гидроцилиндры с гибким штоком [1].
Недостатком известного устройства является то, что расстояние перемещения груза зависит от величины хода поршня гидроцилиндра и с увеличением расстояния приходится применять гидроцилиндры большей длины.
Указанный недостаток устранен в устройстве [2]. Однако использовать данное устройство для подъема грузов в вертикальном направлении нельзя, так как при перестановке поршня в цилиндре будет происходить опускание уже поднятого груза в первоначальное положение. Недостатком известного устройства является также периодическая остановка перемещаемого груза (в том числе и в горизонтальном направлении) при перестановке поршня в цилиндре.
Цель изобретения - создание привода подъемного устройства, свободного от указанных недостатков, т.е. способного перемещать груз в вертикальном направлении непрерывно.
Поставленная цель достигается тем, что для устранения указанных недостатков привод подъемного устройства, содержащий гидроцилиндр с рабочей и возвратной полостями и узлами герметизации, поршень и гибкий шток, поджимной сальник с нажимным элементом, размещенным в поршне, приводной элемент, выполненный в виде ступенчатого поршня со сквозным осевым каналом и образующий с нажимным элементом полость, сообщенную с рабочей полостью гидроцилиндра, узел фиксации в виде подпружиненной конической цанги, охватывающей гибкий шток и взаимодействующей с расточкой поршня и приводным элементом, и распределители, сообщающие рабочую полость гидроцилиндра с источником питания и сливом, дополнительно на этом же гибком штоке размещен второй такой же гидроцилиндр, вектор тяги которого имеет то же направление, что и вектор тяги первого, а возвратная полость которого соединена с возвратной полостью первого гидроцилиндра и с гидропневмоаккумулятором, при этом распределители подключают к источникам питания и сливу только рабочие полости обоих гидроцилиндров, причем для осуществления противофазного движения размещенных в гидроцилиндрах поршней переключение одного из распределителей происходит за счет подачи на него сигналов от соответствующих гидроцилиндров через логические элементы «И».
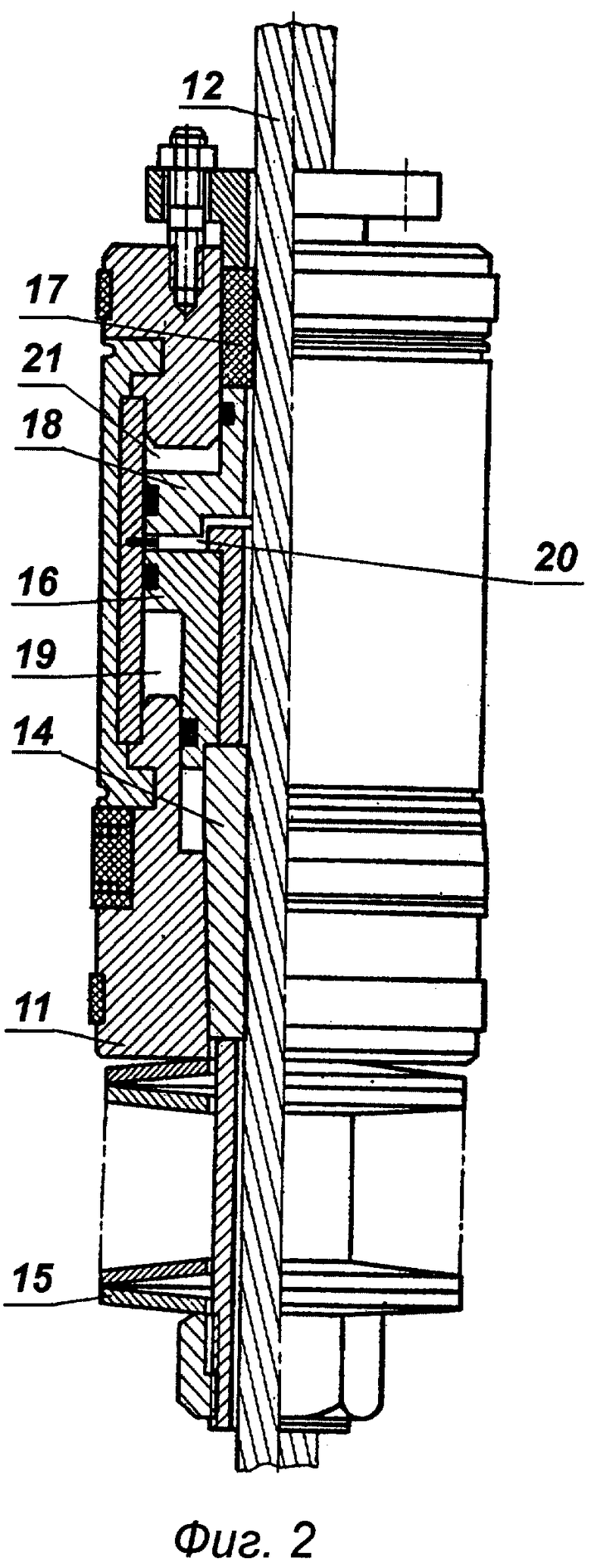
На фиг.1 изображен предлагаемый привод подъемного устройства, принципиальная схема; на фиг.2 изображен разрез поршня с гибким штоком.
Привод подъемного устройства содержит цилиндр 1 (закрепленный неподвижно) с рабочей 2 и возвратной 3 полостями и узлами 4 и 5 герметизации, насосный агрегат 6, распределители (золотники) 7 и 8, датчики 9 и 10 контроля положения. В цилиндре 1 установлен поршень 11, имеющий возможность перемещения вдоль гибкого штока 12. Поршень 11 выполнен с расточкой 13, в которой размещена коническая цанга 14, подпружиненная при помощи пружины 15 относительно поршня 11, охватывающая гибкий шток 12 и взаимодействующая со ступенчатым поршнем 16, размещенным в поршне 11. Шток 12 уплотнен относительно поршня 11 поджимным сальником 17 с нажимным элементом 18. Ступенчатый поршень 16 и нажимной элемент 18 образуют в расточке 13 поршня 11 полости 19-21. При этом полости 19 и 21 сообщены посредством зазоров между частями сборного поршня с возвратной полостью 3, а полость 20 - с рабочей полостью 2. Гибкий шток 12 проходит также через второй гидроцилиндр 22 (также закрепленный неподвижно), имеющий такие же узлы герметизации 4 и 5, рабочую 23 и возвратную полость 24 и поршень 25, имеющий точно такую же конструкцию, что и поршень 11 и поэтому изображенный на чертеже без разреза - непрозрачным. При этом поршень 25 так расположен в гидроцилиндре 22, что тяговое усилие поршня 25 (вектор тяги), развиваемое им, направлено согласно тяговому усилию, развиваемому поршнем 11. Возвратные полости 3 и 24 соединены между собой и гидропневмоаккумулятором 26 трубопроводами. Сигнал о верхнем положении поршня 11 и нижнем положении поршня 25 поступает через логический элемент «И» 27 на датчик положения 10, а сигнал о нижнем положении поршня 11 и верхнем положении поршня 25 поступает через логический элемент «И» 28 на датчик положения 9. Верхнее положение крюка 29 контролируется датчиком переподъема 30, посылающим свой сигнал на сбросные клапаны 31, 32. Нижнее положение крюка контролируется верхним упором 33, воздействующим на датчик 34 спуска, посылающим сигнал на сбросные клапаны 31 и 32, через триггер 35, и на распределитель 7. Привод подъемной установки работает следующим образом. При подаче рабочей среды от насосного агрегата 6 через распределители 7 и 8 в рабочую полость 2 гидроцилиндра 1 рабочая среда одновременно по зазорам в сборном поршне 11 попадает в полость 20, воздействует на поршень 16 и нажимной элемент 18, осуществляя посредством цанги 14 фиксацию поршня 11 относительно гибкого штока 12 и надежное зажатие сальника 17 в зависимости от давления рабочей среды. Поршень 11 и шток 12, зафиксированные друг относительно друга, перемещаются вверх (по чертежу) и перемещает гибкий шток 12, осуществляя подъем груза. При этом рабочая жидкость из возвратной полости 3 гидроцилиндра 1 выдавливается в возвратную полость 24 гидроцилиндра 22 и частично в гидропневмоаккумулятор 26, заставляя перемещаться поршень 25 в нижнее положение (поршень 25 работает так же, как и поршень 11), выдавливая жидкость из полости 23 через распределитель 8 на слив. При подходе поршня 11 к крайнему верхнему положению, а поршня 25 к крайнему нижнему положению, сигналы об этом, через логический элемент «И» 27 (то есть когда поршни обоих гидроцилиндров, двигаясь в противофазе, достигнут оппозитного, крайнего положения, необходимого для переключения на обратное движение), будут поданы к датчику контроля положения 10. При этом распределитель 8 переключается в положение подачи рабочей среды в рабочую полость 23 гидроцилиндра 22 (рабочая полость 2 при этом сообщается со сливом). Поршень 25 при этом будет зафиксирован со штоком 12 (таким же образом, как в предыдущем случае это происходило с поршнем 11), и начнет перемещаться в верхнее положение, осуществляя подъем груза путем перемещения гибкого штока 12. В это же время рабочая жидкость из возвратной полости 24 будет выдавливаться в возвратную полость 3 гидроцилиндра 1 и частично в гидропневмоаккумулятор 26. Одновременно рабочая среда по зазорам в сборном поршне 11 попадает в полости 19 и 21, воздействует на ступенчатый поршень 16 и нажимной элемент 18, последние перемещаются в положение, позволяющее осуществить расфиксацию поршня 11 относительно штока 12 и ослабить зажатие сальника 17. Поршень 11 перемещается относительно штока 12 вниз. По достижению поршнем 11 крайнего нижнего положения, а поршнем 25 крайнего верхнего положения, сигналы об этом, через логический элемент «И» 28 (то есть когда поршни обоих гидроцилиндров, двигаясь в противофазе, достигнут оппозитного положения, необходимого для переключения на обратное движение), будут поданы к датчику контроля положения 9. При этом распределитель 8 переключится в положение подачи рабочей среды в рабочую полость 2 гидроцилиндра 1. Далее цикл повторяется многократно, если система не будет отключена распределителем 7.
В противном случае крюк 29 (с грузом на нем или без груза) достигнет верхнего положения и, своим упором воздействуя на датчик переподъема 30, приведет к срабатыванию сбросных клапанов 31 и 32. В этом случае рабочая жидкость в обход распределителя 8 будет уходить на слив из рабочих полостей 2 и 23. Под действием давления жидкости из гидропневмоаккумулятора 26, поступающей в полости 3 и 24, поршни 11 и 25 будут переведены в нижнее положение соответственно в гидроцилиндрах 1 и 22, а гибкий шток 12, будучи расфиксированным от действия цанг 14 в поршнях 11 и 25, будет перемещаться вниз под действием веса груза крюка 28 до тех пор, пока верхний упор 33, закрепленный на гибком штоке 12, не достигнет датчика 34 спуска. При этом сигнал от датчика 34 спуска через триггер 35 приведет сбросные клапаны 31 и 32 в исходное состояние (сброс рабочей жидкости прекратится) и одновременно, воздействуя на распределитель 7, отключит систему цилиндров от снабжения рабочей жидкостью.
Для приведения системы в работу по подъему груза необходимо при помощи распределителей 7 и 8 подать рабочую жидкость в одну из рабочих полостей 2 или 23. При этом жидкость, находящаяся в одной из возвратных полостей (3 или 24), будет выдавлена в гидропневмоаккумулятор 26, и один из движущихся поршней займет верхнее положение, произведя переключение распределителя 8 для повторного цикла. Процесс подъема начнет осуществляться вновь.
Литература
1. А.с. СССР №1368249, кл. В66В 15/00, 1988.
2. А.с. СССР № 1404693, кл. F15В 11/12, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349538C2 |
| РЕВЕРСИВНЫЙ ГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД | 2007 |
|
RU2335664C1 |
| ГИДРАВЛИЧЕСКОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2007 |
|
RU2349757C2 |
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2347737C1 |
| ДВУХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349537C2 |
| ЧЕТЫРЕХКАНАТНАЯ ЛЕБЕДКА С ГИДРАВЛИЧЕСКИМ ШАГОВЫМ ПРИВОДОМ | 2007 |
|
RU2349539C2 |
| Гидравлический шаговый привод | 1984 |
|
SU1404693A1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ГОРНЫХ ПОРОД ОТРЫВОМ ОТ МАССИВА | 1988 |
|
RU2079653C1 |
| Гидравлический силовой механизм | 1989 |
|
SU1737166A1 |
| Устройство для выпрессовки трубчатых деталей | 1989 |
|
SU1698034A1 |
Изобретение может быть использовано в горной промышленности, в частности для доставки грузов по вертикальным и крутонаклонным стволам, гезенкам или другим выработкам горнорудной промышленности. Устройство состоит из двух неподвижно закрепленных гидроцилиндров, через которые пропущен гибкий шток, выполненный из каната закрытой конструкции, на котором подвешен крюк для грузонесущего устройства. Гибкий шток имеет возможность быть попеременно захватываемым поршнями гидроцилиндров с цангами, которые позволяют перемещать канат с подвешенным к нему грузом. Перемещение указанных поршней происходит под действием рабочей жидкости, подаваемой в гидроцилиндры распределителями от насосного агрегата, а обеспечение согласованного движения поршней в противофазе осуществляется за счет подачи сигналов управления, поступающих от соответствующих гидроцилиндров на распределитель, через логические элементы «И». Изобретение обеспечивает непрерывное перемещение груза в процессе его подъема. 2 ил.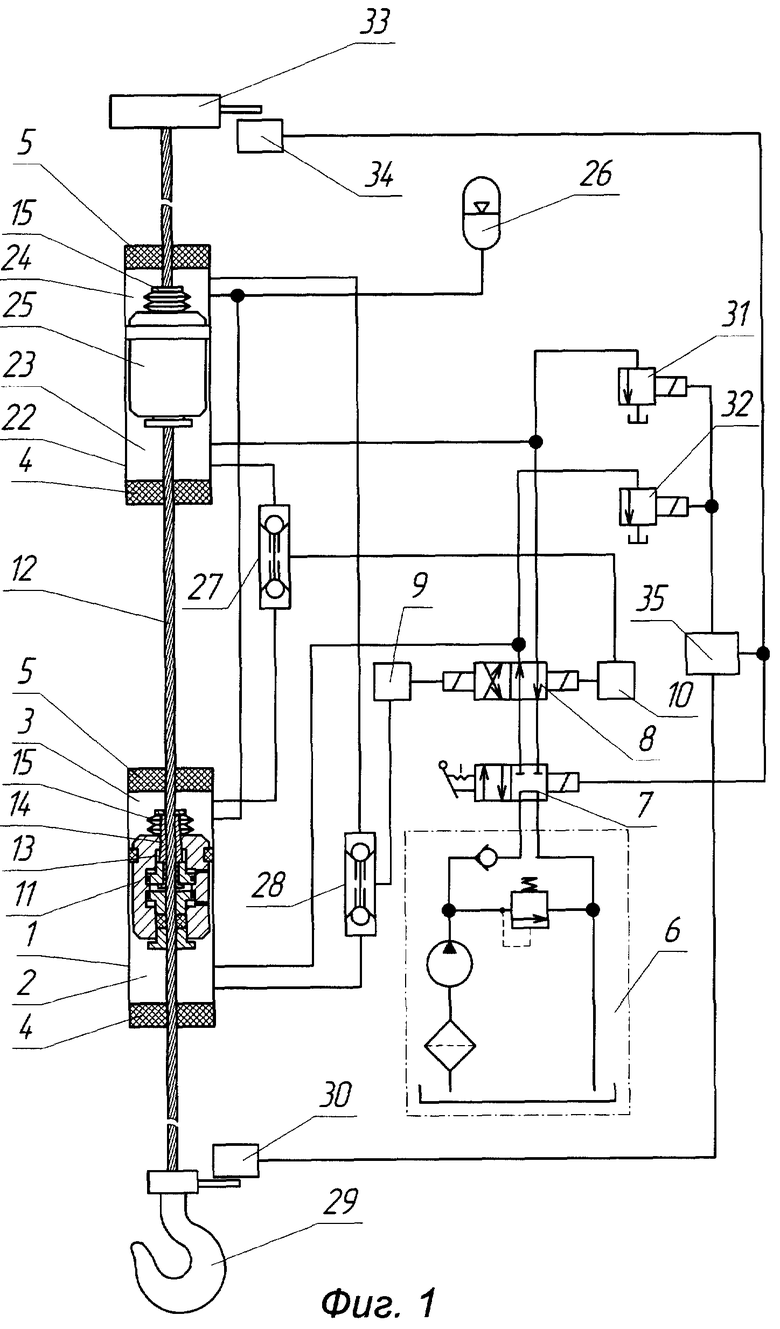
Привод подъемного устройства, содержащий гидроцилиндр с рабочей и возвратной полостями и узлами герметизации, поршень и гибкий шток, поджимной сальник с нажимным элементом, размещенным в поршне, приводной элемент, выполненный в виде ступенчатого поршня со сквозным осевым каналом и образующий с нажимным элементом полость, сообщенную с рабочей полостью гидроцилиндра, узел фиксации в виде подпружиненной конической цанги, охватывающей гибкий шток и взаимодействующей с расточкой поршня и приводным элементом, и распределители, сообщающие рабочую полость гидроцилиндра с источником питания и сливом, отличающийся тем, что на этом же гибком штоке размещен второй такой же гидроцилиндр, вектор тяги которого имеет то же направление, что и вектор тяги первого, а возвратная полость которого соединена с возвратной полостью первого гидроцилиндра и с гидропневмоаккумулятором, при этом распределители подключают к источникам питания и сливу только рабочие полости обоих гидроцилиндров, а для осуществления противофазного движения размещенных в гидроцилиндрах поршней переключение одного из распределителей происходит за счет подачи на него сигналов от соответствующих гидроцилиндров через логические элементы «И».
| Гидравлический шаговый привод | 1984 |
|
SU1404693A1 |
| Такелажная лебедка | 1984 |
|
SU1245548A1 |
| Пневматический шаговый привод | 1979 |
|
SU802659A1 |
| ПРИВОД ЗАТВОРА ОРУДИЯ | 2009 |
|
RU2496074C2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| УСТРОЙСТВО для ОБРАБОТКИ МНОГОГРАННИКОВ | 0 |
|
SU397270A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| US 4593884 A, 10.06.1986. | |||

