Предлагаемое изобретение относится к локационным системам автосопровождения заданного объекта визирования (OВ), а также к локационным системам самонаведения для подвижных носителей с инерциальной измерительной системой, содержащим устройства с изменяющейся ориентацией диаграмм направленности волн, излучаемых антенной, а именно поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя.
Предлагаемые технические решения предназначены для выделения сигналов рассогласования по дальности и углового рассогласования, пропорциональных параметрам инерциального пеленгования заданного объекта визирования по дальности и по направлению в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат, по сигналам предстартовых начальных значений сферических координат заданного OВ и наклонной дальности до заданного OВ, по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ и по измеренным сигналам, пропорциональным текущим значениям проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования заданного OВ на соответствующие оси базовой антенной системы координат, при перемещении по траектории подвижного носителя и его сближении с заданным OВ.
Предлагаемые технические решения могут быть применены:
- в системах инерциального автосопровождения заданного OВ;
- в системах инерциального самонаведения подвижных носителей на заданный OВ;
- в интегрированных комплексированных бортовых системах самонаведения в составе систем управления и стабилизации подвижных носителей.
При создании таких систем важной задачей является:
- обеспечение повышенной точности инерциального автосопровождения заданного OВ на автономном участке траектории самонаведения подвижного носителя, а также повышенной точности и помехоустойчивости локационного автосопровождения OВ;
- обеспечение повышенных тактико-технических характеристик интегрированных комплексированных бортовых систем самонаведения подвижных носителей.
Известны, например, следующие способы пеленгования сигналов OВ и устройства, осуществляющие их, описанные в книге В.М.Артамонова «Следящие системы радиолокационных станций автоматического сопровождения и управления». - Изд. Судостроение: Л., 1968 г. - С.12-35, в которой рассмотрены:
- следящая система радиолокационной станции автоматического сопровождения по направлению с коническим сканированием диаграммы направленности;
- следящая система радиолокационной станции автоматического сопровождения по направлению моноимпульсного типа;
- следящая система радиолокационной станции автоматического сопровождения по дальности;
- следящие системы в радиолиниях и системах самонаведения;
- следящие системы в радиотеленаведении.
Известны также следующие технические решения:
1. Устройство слежения (JP 3627135 В2, 7 G01S 13/66, 09.03.2005), которое «содержит блок 5 для определения разделения цели сопровождения цели путем измерения величины вектора Cк, j; блок 6 управления параметрами следящего фильтра по результата блока 5; блок 2 сглаживания для получения вектора Вк (+) и ковариантной матрицы Рк (+) ошибки сглаживания; блок 3 прогнозирования для получения вектора Вк (-) прогнозирования и ковариантной матрицы Рк (-) ошибки прогнозирования; блок 4 для расчета границ сопровождения».
2. Электронная система самонаведения (JP 3519636 B2, 7 G01S 13/66, F41G 7/24, G01S 13/88, G05D 1/12, 19.04.2004), в которой «отраженный от цели сигнал через антенну 3 и циркулятор 2 поступает в приемный блок 3 радара и далее в блок 5 угловых измерений, в котором вычисляется угол, образуемый между радиолучом радара и целью. Полученное значение угла затем передается в блок 6 пространственной стабилизации».
3. Процессор для обработки информации о сопровождении цели (JP 3653216 В2, 7 G01S 13/66, 25.05.2005), в котором процессор 1 содержит блок 3 для предсказания времени обработки данных сопровождения; блок 4 принятия решения в реальном времени, принимающий решение о сопровождении цели в некоторое заданное время, определяемое блоком 3; блок 5 для временного хранения информации о наблюдаемой цели; блок 5 управления, контролирующий поступление информации о наблюдаемой цели в процессор 1.
4. Угловой дискриминатор (RU 2202806 С1, G01S 13/44, G01S 13/68, G01S 7/36, 29.05.2002). «Сущность изобретения заключается в том, что оно содержит приемопередающую антенну с формирователем суммарного и разностного сигналов, которые образуют антенный блок, к суммарному выходу которого подключены последовательно соединенные антенный переключатель и приемник опорного канала, а к разностному выходу подключены последовательно соединенные антенный переключатель и приемник измерительного канала, передатчик, блок автоматической регулировки усиления, вход которого соединен с выходом приемника опорного канала, а выход подключен ко входам регулировки приемников опорного и измерительного каналов, синхронный детектор, входы которого соединены с выходами приемников опорного и измерительного каналов, а выход является выходом сигнала углового рассогласования, направленный ответвитель, включенный между выходом передатчика и вторым входом антенного переключателя, соединенного с суммарным выходом антенного блока, и последовательно соединенные фазовращатель, вход которого подключен ко второму выходу направленного ответвителя, и дополнительная передающая антенна, конструктивно входящая в состав антенного блока и имеющая поляризацию, ортогональную поляризации основной приемопередающей антенны, что обеспечивает пространственный поворот плоскости поляризации результирующего зондирующего сигнала, при этом кросс-поляризационная помеха, ортогональная по поляризации зондирующему сигналу, не будет таковой для основной приемопередающей антенны и, как следствие, не будет действовать на угловой дискриминатор…».
5. Способ измерения угловых координат объекта и радиолокационная станция для его реализации (RU 2291466 C1, G01S 13/68, 26.05.2005), которые «решают задачу повышения точности измерения угловых координат объекта» вследствие «излучения зондирующих сигналов, приема и обнаружения отраженных от объекта сигналов, измерения уровня принятых сигналов и угловых координат луча, соответствующих принятым сигналам, формирования двумерных угловых пакетов принятых сигналов, выполнения анализа двумерного углового пакета принятых сигналов, на основании которого вычисляют угловые координаты объекта».
6. Инерциальная система управления ((WO) 4097329 A1, 7 F41Gт 7/36, 11.11.2004), которая «функционирует без применения гироскопов, имеет ортогональную систему координат и содержит три акселерометра, антенну и приемник глобальной системы позиционирования, компьютер и программное обеспечение. Акселерометры обеспечивают получение данных об ускорениях, измеренных в направлениях осей xyz соответственно. Приемник глобальной системы позиционирования обеспечивает получение данных о координатах и скорости движения снаряда в земных координатах. Компьютер обеспечивает хранение данных о координатах снаряда и преобразует данные об ускорениях в навигационные координаты. Программное обеспечение компьютера обеспечивает получение информации об углах курса, тангажа и крена».
Рассмотренные технические решения основаны на радиолокационном контакте с целью, обеспечивают формирование сигналов пеленгования цели на основе обработки отраженных от облучаемой цели зондирующих сигналов. Выделение сигналов пеленгования цели не может быть осуществлено при отсутствии радиолокационного автосопровождения (слежения) цели.
Таким образом, ни один из рассмотренных аналогов не является близким по технической сущности и не может быть принят в качестве прототипа предлагаемых технических решений.
Целью заявляемых технических решений (способа и инерциального дискриминатора сигналов пеленгования для его осуществления) является обеспечение повышенной точности инерциального автосопровождения заданного OВ на автономном участке траектории самонаведения подвижного носителя, а также повышенной точности и помехоустойчивости локационного автосопровождения OВ.
Сущность изобретения заключается в том, что по предлагаемому способу формируют по первоначально определенным и заданным в предстартовом положении подвижного носителя сигналам, пропорциональным начальным значениям угла наклона  и азимута
и азимута  заданного OВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат Ox1y1z1 (фиг.4), связанной с центром масс подвижного носителя, наклонной дальности L0 до заданного OВ (фиг.1), а также по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ, пропорциональным начальным значениям:
заданного OВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат Ox1y1z1 (фиг.4), связанной с центром масс подвижного носителя, наклонной дальности L0 до заданного OВ (фиг.1), а также по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ, пропорциональным начальным значениям:
- проекций  ,
,  ,
,  вектора
вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Oξηζ (фиг.1, фиг.3);
линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Oξηζ (фиг.1, фиг.3);
- декартовых координат ξ0 (D0), η0 (Н0), ζ0 подвижного носителя в местной горизонтальной системе координат, где D0 и Н0 - начальные значения горизонтальной дальности до заданного OВ и высоты старта подвижного носителя (фиг.1);
- долготы λ0 и географической широты  подвижного носителя (фиг.1);
подвижного носителя (фиг.1);
- рыскания ψ0, тангажа υ0 и крена γ0 подвижного носителя (фиг.5); сигналы, пропорциональные начальным значениям:
- проекций  ,
,  ,
,  вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат;
вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат;
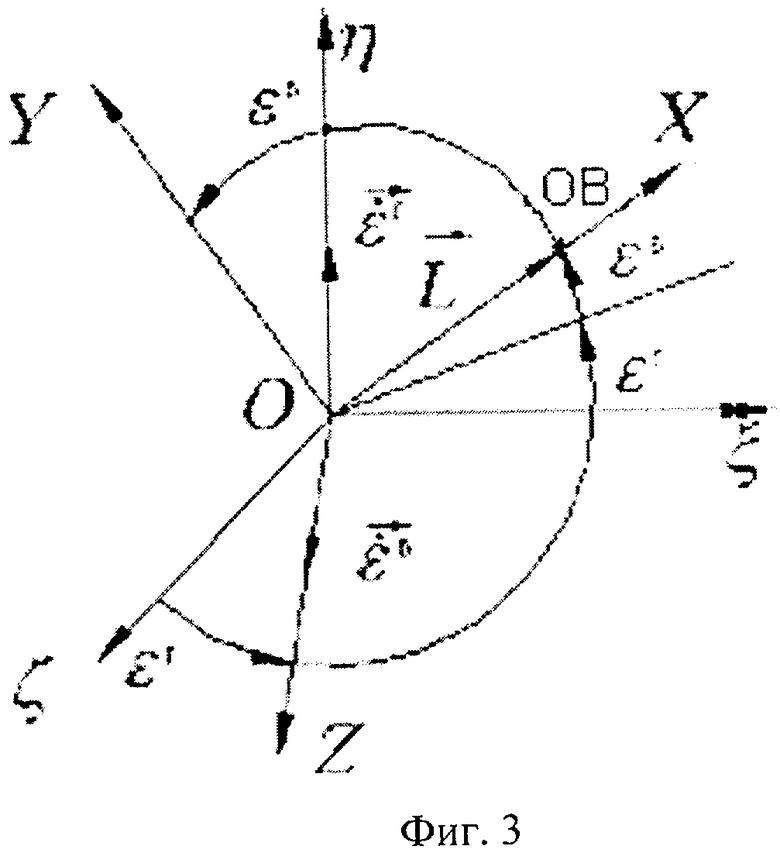
- углов  и
и  визирования заданного OВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат Оξηζ (фиг.1, фиг.3);
визирования заданного OВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат Оξηζ (фиг.1, фиг.3);
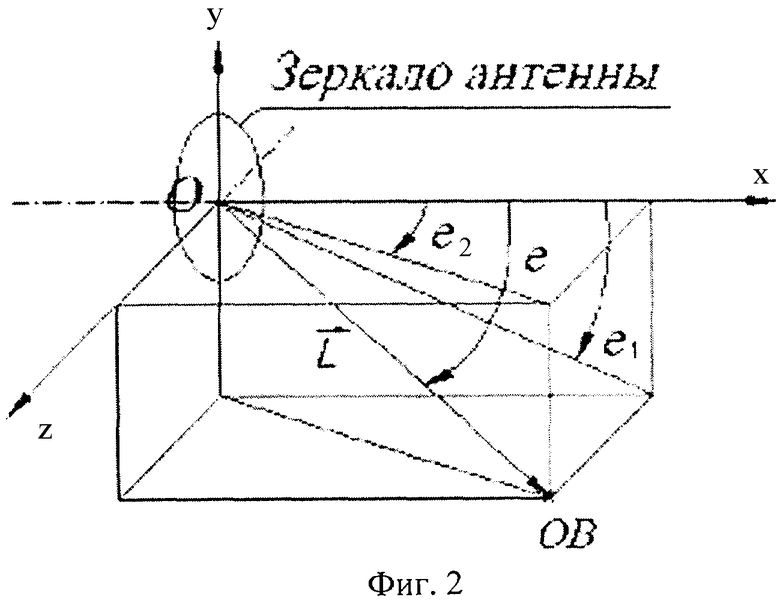
- параметров  и
и  инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хОу соответственно в базовой антенной системе координат Oxyz (фиг.2);
инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хОу соответственно в базовой антенной системе координат Oxyz (фиг.2);
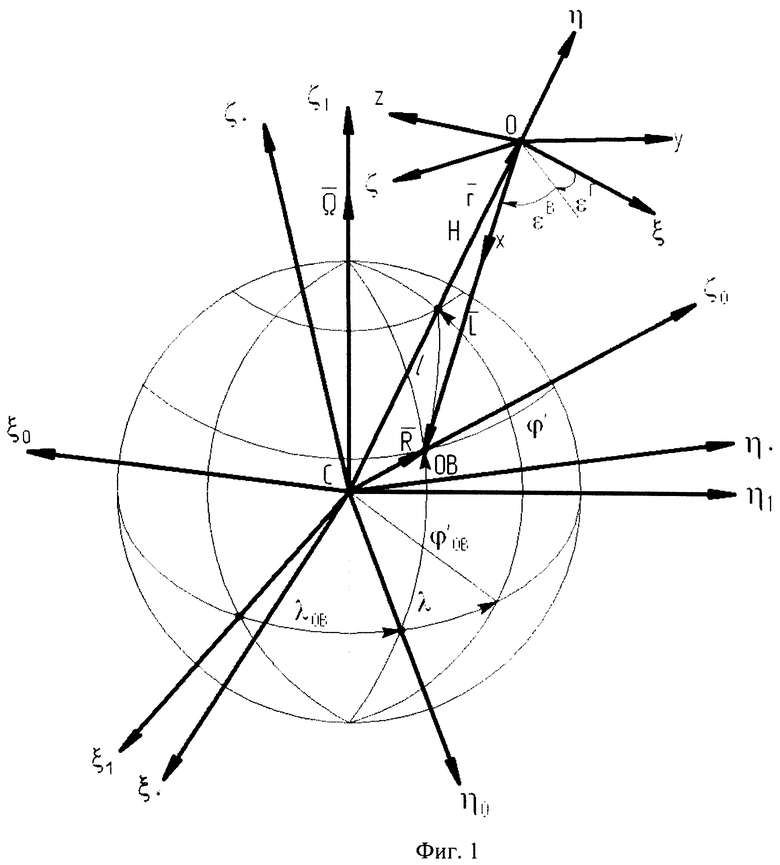
- направляющих косинусов  (где i, j=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OВ, расположенным на земной поверхности (фиг.1).
(где i, j=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OВ, расположенным на земной поверхности (фиг.1).
В момент старта подвижного носителя обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории определяют сигналы, пропорциональные измеренным текущим значениям проекций nх, nу, nz вектора  кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора
кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора  абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам текущих значений проекций nX, nу, nz вектора
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам текущих значений проекций nX, nу, nz вектора  кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора
кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора  абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке подвижного носителя, выделяют сигнал, пропорциональный разнице (рассогласованию) ΔL между начальным значением наклонной дальности L0 до заданного OB и полученными текущими значениями наклонной дальности L сближения подвижного носителя с заданным OВ, по которому осуществляют инерциальное автосопровождение заданного OВ по дальности. Одновременно по полученным сигналам измеренной текущей информации и по сигналам начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров e1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хOу соответственно в базовой антенной системе координат Oxyz, по которым осуществляют инерциальное автосопровождение заданного OВ по направлению.
абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке подвижного носителя, выделяют сигнал, пропорциональный разнице (рассогласованию) ΔL между начальным значением наклонной дальности L0 до заданного OB и полученными текущими значениями наклонной дальности L сближения подвижного носителя с заданным OВ, по которому осуществляют инерциальное автосопровождение заданного OВ по дальности. Одновременно по полученным сигналам измеренной текущей информации и по сигналам начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров e1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хOу соответственно в базовой антенной системе координат Oxyz, по которым осуществляют инерциальное автосопровождение заданного OВ по направлению.
Сущность предлагаемого изобретения заключается также и в том, что инерциальный дискриминатор сигналов пеленгования, осуществляющий способ, содержит интегрированное антенное устройство и цифровое вычислительное устройство (ЦВУ). При этом интегрированное антенное устройство содержит двухосный карданов подвес зеркала. Ось вращения наружной рамки двухосного карданова подвеса установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к ее оси вращения. Кроме того, в состав антенного устройства входят электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки и датчик угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона εH и по азимуту εA, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентных измерителя соответствующих проекций nх,, nу, nz вектора  кажущегося линейного ускорения на оси базовой антенной системы координат Oxyz. Управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента
кажущегося линейного ускорения на оси базовой антенной системы координат Oxyz. Управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента  его ротора в заарретированном положении гироскопа совпадает с нулевым положением направления линии визирования интегрированного антенного устройства. Двухканальный гироскопический ДУС установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым положением направления линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства. При этом направление вектора кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства. Все три однокомпонентных измерителя (акселерометра) соответствующих проекций вектора кажущегося линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением направления линии визирования интегрированного антенного устройства.
его ротора в заарретированном положении гироскопа совпадает с нулевым положением направления линии визирования интегрированного антенного устройства. Двухканальный гироскопический ДУС установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым положением направления линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства. При этом направление вектора кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства. Все три однокомпонентных измерителя (акселерометра) соответствующих проекций вектора кажущегося линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением направления линии визирования интегрированного антенного устройства.
Зеркало интегрированного антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании интегрированного антенного устройства. При этом зеркало шарнирно соединено тягами механического координатора соответственно с наружной и с внутренней рамкой двухстепенного карданова подвеса зеркала интегрированного антенного устройства.
Первый вход интегрированного антенного устройства соединен информационной линией связи с первым выходом ЦВУ. Первый вход ЦВУ соединен информационной линией связи с первым выходом интегрированного антенного устройства, второй, третий, четвертый и пятый выходы которого соединены соответственно с третьим, четвертым, пятым и шестым входами ЦВУ. На эти входы ЦВУ из интегрированного антенного устройства поступают следующие сигналы, пропорциональные:
- скорости  изменения вертикального угла εB визирования заданного OВ (со второго выхода);
изменения вертикального угла εB визирования заданного OВ (со второго выхода);
- скорости  изменения горизонтального угла εГ визирования заданного OВ (с третьего выхода);
изменения горизонтального угла εГ визирования заданного OВ (с третьего выхода);
- отработке сигнала угла наклона  при инерциальном автосопровождении заданного OВ по углу наклона (с четвертого выхода);
при инерциальном автосопровождении заданного OВ по углу наклона (с четвертого выхода);
- отработке сигнала азимута  при инерциальном автосопровождении заданного OВ по азимуту (с пятого выхода).
при инерциальном автосопровождении заданного OВ по азимуту (с пятого выхода).
На второй вход ЦВУ по информационной линии связи поступает от внешнего источника информации информационный массив сигналов начальных сферических координат заданного OВ, т.е. угла наклона  , азимута
, азимута  и наклонной дальности L0 до заданного OВ, а также сигналы начальных значений условий выставки инерциального измерения параметров вектора визирования, т.е.:
и наклонной дальности L0 до заданного OВ, а также сигналы начальных значений условий выставки инерциального измерения параметров вектора визирования, т.е.:
- проекции 

 вектора
вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Oξηζ;
линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Oξηζ;
- декартовых координат ξ0, η0, ζ0 подвижного носителя в местной горизонтальной системе координат Oξηζ;
- долготы λ0 и географической широты  подвижного носителя;
подвижного носителя;
- рыскания ψ0, тангажа ϑ0, крена γ0 подвижного носителя.
Со второго и третьего выходов ЦВУ поступают сигналы углового рассогласования, пропорциональные параметрам пеленгования e1 и е2 заданного OВ, для инерциального автосопровождения заданного OВ по направлению, а с четвертого, пятого и шестого выходов ЦВУ - сигналы инерциального автосопровождения заданного OВ по дальности, т.е. сигналы, пропорциональные начальной дальности L0, текущей дальности L до заданного OВ и их разнице (рассогласованию) ΔL, соответственно для систем автосопровождения, внешних по отношению к заявленному инерциальному дискриминатору сигналов пеленгования.
Введение указанных признаков в способ и в инерциальный дискриминатор сигналов пеленгования для осуществления способа обеспечивает решение задачи формирования сигналов рассогласования по дальности и углового рассогласования, пропорциональных параметрам инерциального пеленгования заданного OВ по дальности и по направлению в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz, по сигналам предстартовых начальных значений сферических координат заданного OВ и наклонной дальности до заданного OВ, по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ и по измеренным сигналам, пропорциональным текущим значениям проекций кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования заданного OВ на соответствующие оси базовой антенной системы координат, при перемещении по траектории подвижного носителя и его сближении с заданным OВ.
Введение указанных признаков обеспечивает повышенную точность инерциального автосопровождения заданного OВ на автономном участке траектории инерциального самонаведения подвижного носителя, а также повышенную точность и помехоустойчивость локационного автосопровождения OВ.
Из уровня техники не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений задачи формирования сигналов инерциального пеленгования заданного OВ.
Поэтому можно считать, что предложенные технические решения соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
на фиг.1 - принятые системы координат;
на фиг.2 - положение вектора  визирования заданного OB в базовой антенной системе координат Oxyz;
визирования заданного OB в базовой антенной системе координат Oxyz;
на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Oξηζ;
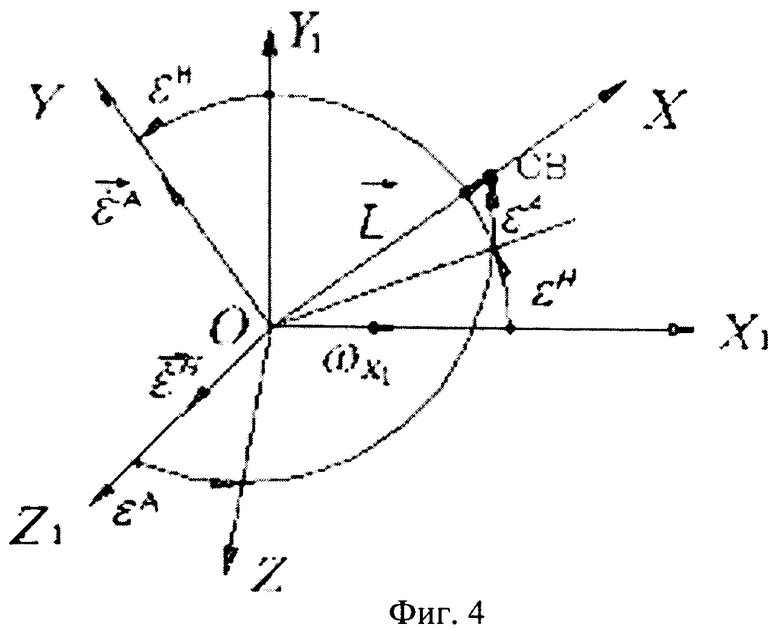
на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной с подвижным носителем системы координат Ox1y1z1;
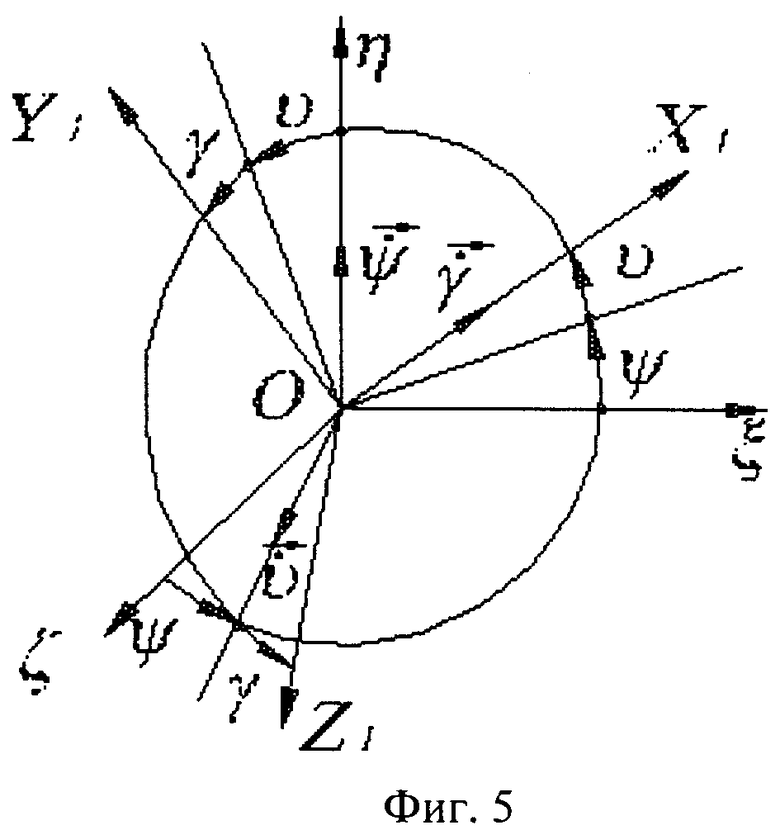
на фиг.5 - взаимное положение связанной с подвижным носителем системы координат Ox1y1z1 и местной горизонтальной системы координат Oξηζ;
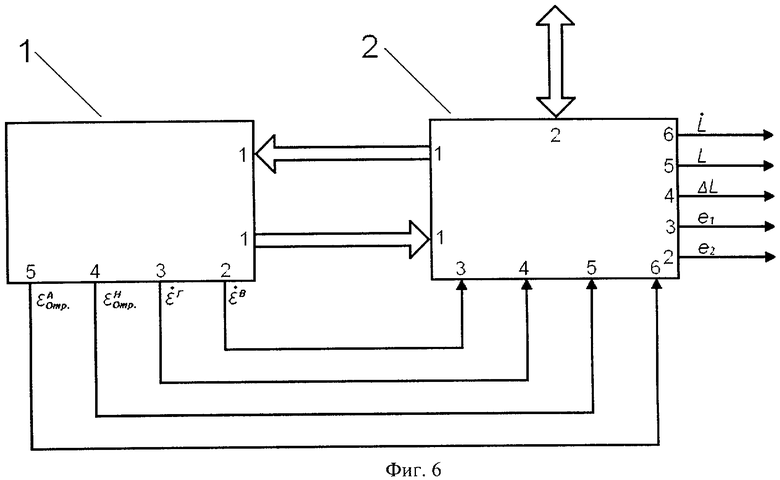
на фиг.6 - структурная схема предлагаемого инерциального дискриминатора сигналов пеленгования заданного OВ;
на фиг.7 - принципиальная кинематическая схема интегрированного антенного устройства инерциального дискриминатора сигналов пеленгования заданного OВ.
Предлагаемый способ характеризуется тем, что для обеспечения получения сигналов инерциального пеленгования заданного OВ первоначально определяют и задают в предстартовом положении подвижного носителя сигналы, пропорциональные начальным значениям угла наклона  и азимута
и азимута  заданного OВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат Ox1y1z1 (фиг.4), связанной с центром масс подвижного носителя, наклонной дальности L0 до заданного OВ (фиг.1), а также сигналы начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ, пропорциональные начальным значениям:
заданного OВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат Ox1y1z1 (фиг.4), связанной с центром масс подвижного носителя, наклонной дальности L0 до заданного OВ (фиг.1), а также сигналы начальных условий выставки инерциального измерения параметров вектора визирования заданного OВ, пропорциональные начальным значениям:
- проекций вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат (фиг.1, фиг.3);
линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат (фиг.1, фиг.3);
- ξ0(D0), η0(Н0), ζ0 - декартовых координат подвижного носителя в местной горизонтальной системе координат Oξηζ, где D0 и Н0 - начальные значения горизонтальной дальности до заданного OВ и высоты старта подвижного носителя (фиг.1);
- долготы λ0 и географической широты  подвижного носителя (фиг.1);
подвижного носителя (фиг.1);
- рыскания ψ0, тангажа ϑ0, крена γ0 подвижного носителя (фиг.5).
По первоначально определенным и заданным сигналам формируют сигналы, пропорциональные начальным значениям:
- проекций  ,
,  ,
,  вектора
вектора  линейной скорости предстартового перемещения основания 7 интегрированного антенного устройства 1 (фиг.6, фиг.7) вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, фиг.2);
линейной скорости предстартового перемещения основания 7 интегрированного антенного устройства 1 (фиг.6, фиг.7) вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, фиг.2);
- углов  и
и  визирования заданного OВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ (фиг.1, фиг.3);
визирования заданного OВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ (фиг.1, фиг.3);
- параметров  и
и  инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хОу соответственно в базовой антенной системе координат Oxyz (фиг.2);
инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хОу соответственно в базовой антенной системе координат Oxyz (фиг.2);
- направляющих косинусов  (где i, j=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат Оξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OВ, расположенным на земной поверхности (фиг.1).
(где i, j=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат Оξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OВ, расположенным на земной поверхности (фиг.1).
Формирование перечисленных сигналов выполняют согласно следующему алгоритму:

где ξ0=ξmax - начальное значение горизонтальной декартовой координаты заданного OВ, т.е. горизонтальная дальность D0 пуска подвижного носителя;

где ζ0 - начальное значение боковой декартовой координаты заданного OB в горизонтальной плоскости;





где r0 - начальное значение модуля радиуса - вектора  центра масс подвижного носителя относительно центра Земли (фиг.1);
центра масс подвижного носителя относительно центра Земли (фиг.1);
Н0=η0 - высота пуска носителя;
R=R3 - радиус земного сфероида в месте нахождения заданного OВ;

где L0 - начальное значение наклонной дальности до заданного OB в предстартовом положении подвижного носителя;
P0 - начальное значение полупериметра векторного треугольника, образуемого векторами  ,
,  ,
,  ;
;




где i, j=1, 2, 3.
В момент старта подвижного носителя обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории определяют сигналы, пропорциональные измеренным текущим значениям проекций nх, nу, nz вектора  кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора
кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора  абсолютной угловой скорости поворота вектора визирования заданного OВ на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам текущих значений проекций nх, nу, nz вектора
абсолютной угловой скорости поворота вектора визирования заданного OВ на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам текущих значений проекций nх, nу, nz вектора  кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора
кажущегося линейного ускорения движения и проекций ωх, ωу, ωz вектора  абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке подвижного носителя, определяют сигнал, пропорциональный рассогласованию ΔL между начальным значением наклонной дальности L0 до заданного OВ и полученным текущим значением наклонной дальности сближения L подвижного носителя с заданным OВ, по которому осуществляют инерциальное автосопровождение заданного OВ по дальности. Одновременно из полученных сигналов измеренной текущей информации и сигналов начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров e1, е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хOу соответственно в базовой антенной системе координат Oxyz, по которым осуществляют инерциальное автосопровождение заданного OВ по направлению.
абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке подвижного носителя, определяют сигнал, пропорциональный рассогласованию ΔL между начальным значением наклонной дальности L0 до заданного OВ и полученным текущим значением наклонной дальности сближения L подвижного носителя с заданным OВ, по которому осуществляют инерциальное автосопровождение заданного OВ по дальности. Одновременно из полученных сигналов измеренной текущей информации и сигналов начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров e1, е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хOу соответственно в базовой антенной системе координат Oxyz, по которым осуществляют инерциальное автосопровождение заданного OВ по направлению.
Выделение указанных сигналов выполняют согласно следующему алгоритму:
где
При этом общий алгоритм решения данной задачи представляет собой систему дифференциальных уравнений первого порядка в векторной форме:
причем дифференцирование производится в инерциальной системе координат Сξ*η*ζ* (фиг.1.), где для случая визирования неподвижного OВ радиус-вектор  и, принимая угловую скорость суточного вращения Земли
и, принимая угловую скорость суточного вращения Земли  , по теореме Кориолиса имеем:
, по теореме Кориолиса имеем:

причем

где µ - произведение массы Земли на гравитационную постоянную;
ε=ε(ξ1, η1, ζ1) - составляющая силовой функции поля тяготения Земли, характеризующая ее малое отклонение от сферической формы; ξ1, η1, ζ1 - проекции радиуса - вектора  на оси экваториальной (геоцентрической) системы координат Сξ1η1ζ1 (фиг.1);
на оси экваториальной (геоцентрической) системы координат Сξ1η1ζ1 (фиг.1);



где

Таким образом, полный алгоритм выделения сигналов углового рассогласования, пропорциональных текущим значениям параметров e1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях xOz и хOу пеленгования соответственно в базовой антенной системе координат Oxyz и разницы (рассогласования) ΔL между начальным значением наклонной дальности L0 до заданного OВ и получаемым текущим значением наклонной дальности сближения подвижного носителя с заданным OВ, имеет вид:
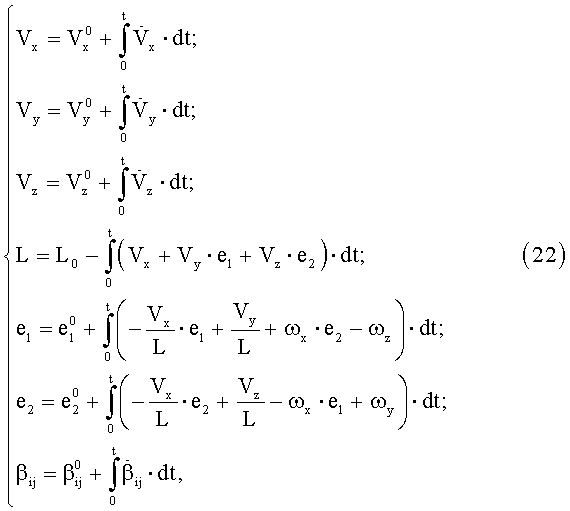
где i, j=1, 2, 3, при этом

Полученные сигналы e1 и е2 являются сигналами углового рассогласования (ошибки) между направлением оптической оси зеркала интегрированного антенного устройства и направлением вектора визирования на заданной OВ, а сигнал ΔL является рассогласованием (ошибкой) между начальной наклонной дальностью L0 до заданного OB и текущей наклонной дальностью L0 сближения подвижного носителя с заданным OВ. Полученные сигналы рассогласования предназначены для инерциального автосопровождения заданного OВ по направлению и по дальности.
Предлагаемый инерциальный дискриминатор сигналов пеленгования заданного OВ, осуществляющий заявленный способ, содержит (фиг.6) интегрированное антенное устройство 1 и цифровое вычислительное устройство (ЦВУ) 2.
При этом интегрированное антенное устройство 1 содержит двухосный карданов подвес 3 зеркала 4 (фиг.7). Ось 5 вращения наружной рамки 6 двухосного карданова подвеса 3 установлена на основании 7 антенного устройства 1, а ось 8 вращения внутренней рамки 9 установлена в наружной рамке 6 перпендикулярно к ее оси 5 вращения. Кроме того, в состав антенного устройства 1 входит электродвигатель 10 поворота наружной рамки 6 двухосного карданова подвеса 3 и электродвигатель 11 поворота внутренней рамки 9 двухосного карданова подвеса 3, датчик 12 угла поворота наружной рамки 6 и датчик 13 угла поворота внутренней рамки 9 двухосного карданова подвеса 3 соответственно по углу наклона εH и по азимуту εА, а также управляемый трехстепенной гироскоп 14, двухканальный гироскопический датчик угловой скорости (ДУС) 15, три однокомпонентных измерителя 16, 17, 18 соответствующих проекций nх, nу, nz вектора  кажущегося линейного ускорения на оси базовой антенной системы координат Oxyz. Управляемый трехстепенной гироскоп 14 установлен во внутренней рамке 9 двухосного карданова подвеса 3 антенного устройства 1 так, что направление вектора кинетического момента
кажущегося линейного ускорения на оси базовой антенной системы координат Oxyz. Управляемый трехстепенной гироскоп 14 установлен во внутренней рамке 9 двухосного карданова подвеса 3 антенного устройства 1 так, что направление вектора кинетического момента  его ротора в заарретированном положении гироскопа 14 совпадает с нулевым положением направления линии визирования интегрированного антенного устройства 1.
его ротора в заарретированном положении гироскопа 14 совпадает с нулевым положением направления линии визирования интегрированного антенного устройства 1.
Двухканальный гироскопический ДУС 15 установлен также во внутренней рамке 9 двухосного карданова подвеса 3 антенного устройства 1 так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым положением направления линии визирования антенного устройства 1, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси 8 вращения внутренней рамки 9 двухосного карданова подвеса 3 антенного устройства 1. При этом направление вектора  кинетического момента ротора гироскопического ДУС 15 совпадает с положительным направлением оси 5 вращения наружной рамки 6 двухосного карданова подвеса 3 антенного устройства 1.
кинетического момента ротора гироскопического ДУС 15 совпадает с положительным направлением оси 5 вращения наружной рамки 6 двухосного карданова подвеса 3 антенного устройства 1.
Все три однокомпонентных измерителя (акселерометра) 16, 17, 18 соответствующих проекций nх, nу, nz вектора  кажущегося линейного ускорения установлены также во внутренней рамке 9 двухосного карданова подвеса 3 так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей (акселерометров) соответствующих проекций вектора кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением направления линии визирования интегрированного антенного устройства 1.
кажущегося линейного ускорения установлены также во внутренней рамке 9 двухосного карданова подвеса 3 так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей (акселерометров) соответствующих проекций вектора кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением направления линии визирования интегрированного антенного устройства 1.
Зеркало 4 интегрированного антенного устройства 1 выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 19 относительно центра излучения облучателя 20, жестко закрепленного на основании 7 антенного устройства 1. При этом зеркало шарнирно соединено тягами 21, 22 механического координатора соответственно с наружной рамкой 6 и с внутренней рамкой 9 двухосного карданова подвеса 3 зеркала 4 интегрированного антенного устройства 1.
Первый вход ЦВУ 2 соединен информационной линией связи с первым выходом интегрированного антенного устройства 1, первый вход которого соединен информационной линией связи с первым выходом ЦВУ 2. Второй, третий, четвертый и пятый выходы интегрированного антенного устройства 1 соединены соответственно с третьим, четвертым, пятым и шестым входами ЦВУ 2. При этом с выходов интегрированного антенного устройства 1 поступают на соответствующие входы ЦВУ 2 следующие сигналы, пропорциональные:
- со второго выхода - скорости  изменения вертикального угла εB визирования заданного OВ;
изменения вертикального угла εB визирования заданного OВ;
- с третьего выхода - скорости  изменения горизонтального угла εГ визирования заданного OВ;
изменения горизонтального угла εГ визирования заданного OВ;
- с четвертого выхода - сигнал отработки, пропорциональный углу наклона  , при инерциальном автосопровождении заданного OВ по углу наклона;
, при инерциальном автосопровождении заданного OВ по углу наклона;
- с пятого выхода - сигнал отработки, пропорциональный азимуту  при инерциальном автосопровождении заданного OВ по азимуту.
при инерциальном автосопровождении заданного OВ по азимуту.
На второй вход ЦВУ 2 по информационной линии связи поступает от внешнего источника информации информационный массив сигналов начальных сферических координат заданного OВ, т.е. угла наклона  , азимута
, азимута  и наклонной дальности L0 до заданного OВ, а также сигналов начальных значений условий выставки инерциального измерения параметров вектора визирования, т.е.:
и наклонной дальности L0 до заданного OВ, а также сигналов начальных значений условий выставки инерциального измерения параметров вектора визирования, т.е.:
- проекции  ,
,  ,
,  вектора
вектора  линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Оξηζ;
линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат Оξηζ;
- декартовых координат ξ0, η0, ζ0 подвижного носителя в местной горизонтальной системе координат Oξηζ;
- долготы λ0 и географической широты  подвижного носителя;
подвижного носителя;
- рыскания ψ0, тангажа υ0 и крена γ0 подвижного носителя.
Второй, третий, четвертый, пятый и шестой выходы ЦВУ 2 являются выходами инерциального дискриминатора сигналов пеленгования заданного OВ.
ЦВУ 2 включает в свой состав аналого-цифровые преобразователи входных сигналов, процессор обработки сигналов инерциальных измерений проекций векторов кажущегося линейного ускорения движения и абсолютной угловой скорости поворота вектора визирования заданного OВ, оперативное запоминающееся устройство, цифроаналоговые преобразователи выходных сигналов, взаимосвязанные входами-выходами по каналам информационного обмена между собой, с внешним источником информации и интегрированным антенным устройством 1.
Работа предлагаемого технического решения (способа и инерциального дискриминатора сигналов пеленгования заданного OВ) осуществляется следующим образом.
ЦВУ 2 обеспечивает хранение информационного массива сигналов, введенного от внешнего источника информации по информационной линии связи, т.е. начальных значений сферических координат взаимного положения подвижного носителя в предстартовом положении и заданного OВ, сигналов начальных условий выставки инерциального измерения параметров вектора визирования заданного OB в местной горизонтальной системе координат Оξηζ, и преобразование последних в базовую антенную систему координат Oxyz. Кроме того, программное обеспечение ЦВУ 2 обеспечивает получение информации о сигналах углового рассогласования, пропорциональных параметрам e1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования xOz и хOу соответственно в базовой антенной системе координат Oxyz, начального значения наклонной дальности до заданного OВ, текущего значения наклонной дальности сближения подвижного носителя с заданным OВ и их разницы (рассогласования) для осуществления инерциального автосопровождения заданного OВ по направлению и по дальности.
При перемещении после старта подвижного носителя и сближении его с заданным OВ по сигналам гироинерциальных датчиков, пропорциональным первичной информации о проекциях вектора кажущегося линейного ускорения движения и вектора абсолютной угловой скорости поворота вектора визирования заданного OВ на оси базовой антенной системы координат Oxyz, при заданных начальных координатах взаимного положения подвижного носителя в предстартовом положении и OВ и заданных начальных условиях выставки инерциального измерения параметров вектора визирования на выходе инерциального дискриминатора формируются сигналы углового рассогласования (ошибки), пропорциональные параметрам e1, е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях xOz и хOу пеленгования в базовой антенной системе координат Oxyz, и сигнал ΔL рассогласования (ошибки) по дальности. Сформирование сигналы являются сигналами инерциального автосопровождения заданного OВ по направлению и по дальности соответственно.
Рассогласования (ошибки) e1, е2 имеют единую отсчетную базу и аналогичны соответствующим рассогласованиям между направлением линии визирования антенны, т.е. положением максимума диаграммы направленности излучаемой, например, электромагнитной энергии, и направлением на сопровождаемый OВ, определяемым угловым дискриминатором замкнутых контуров радиолокационного автосопровождения по направлению. В этом смысле они являются идентичными.
Проведенные исследования показывают, что предлагаемые технические решения в отличие, например, от способов и систем радиолокационного автосопровождения, осуществляющих их, обладают абсолютной помехозащищенностью, так как не излучают и не принимают никаких радиосигналов. Использование заявляемых технических решений обеспечивает повышение точности инерциального автосопровождения заданного OВ на автономном участке траектории самонаведения подвижного носителя, повышенную точность и помехоустойчивость при совместной работе предлагаемых технических решений с радиолокационным автосопровождением OВ.
Предложенные технические решения также обеспечивают повышение тактико-технических характеристик интегрированных комплексированных бортовых систем самонаведения подвижных носителей.
Предлагаемое изобретение относится к локационным системам автосопровождения заданного объекта визирования (ОВ), а также к локационным системам самонаведения для подвижных носителей с инерциальной измерительной системой, содержащим устройства с изменяющейся ориентацией диаграмм направленности волн, излучаемых антенной, а именно поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя. Техническим результатом изобретения является повышение помехозащищенности, повышение точности инерциального автосопровождения заданного ОВ на автономном участке траектории самонаведения подвижного носителя, повышение точности и помехоустойчивости при совместной работе предлагаемых технических решений с радиолокационным автосопровождением ОВ, повышение тактико-технических характеристик интегрированных комплексированных бортовых систем самонаведения подвижных носителей. Предложены способ и инерциальный дискриминатор сигналов пеленгования заданного ОВ для его осуществления, включающий в свой состав интегрированное антенное устройство и цифровое вычислительное устройство. 2 н.п. ф-лы, 7 ил.
1. Способ формирования сигналов инерциального пеленгования заданного объекта визирования (ОВ), характеризирующийся тем, что по первоначально определенным и заданным в предстартовом положении подвижного носителя сигналам, пропорциональным начальным значениям угла наклона и азимута заданного ОВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат, связанной с центром масс подвижного носителя, наклонной дальности до заданного ОВ, а также по сигналам начальных условий выставки инерциального измерения параметров вектора визирования заданного ОВ, пропорциональным начальным значениям проекций вектора линейной скорости предстартового перемещения подвижного носителя на соответствующие оси местной горизонтальной системы координат, декартовых координат подвижного носителя в местной горизонтальной системе координат, долготы и географической широты подвижного носителя, углов рыскания, тангажа и крена подвижного носителя, формируют сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства с подвижным носителем на соответствующие оси базовой антенной системы координат, углов визирования заданного ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат, параметров инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным ОВ, в момент старта подвижного носителя обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории определяют сигналы, пропорциональные измеренным текущим значениям проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, по полученным сигналам текущих значений проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке подвижного носителя, определяют сигнал, пропорциональный рассогласованию между начальным значением наклонной дальности до заданного ОВ и полученными текущими значениями наклонной дальности сближения подвижного носителя с заданным ОВ, по которому осуществляют инерциальное автосопровождение заданного ОВ по дальности, одновременно из полученных сигналов измеренной текущей информации и сигналов начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования соответственно в базовой антенной системе координат, по которым осуществляют инерциальное автосопровождение заданного ОВ по направлению.
2. Инерциальный дискриминатор сигналов пеленгования для осуществления способа по п.1, характеризующийся тем, что содержит интегрированное антенное устройство и цифровое вычислительное устройство (ЦВУ), при этом интегрированное антенное устройство включает двухосный карданов подвес зеркала, ось вращения наружной рамки которого установлена на основании интегрированного антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно ее оси вращения, а также электродвигатель поворота наружной рамки и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки и датчик угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентных измерителя соответствующих проекций вектора кажущегося линейного ускорения на оси базовой антенной системы координат, причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым положением направления линии визирования интегрированного антенного устройства, двухканальный гироскопический ДУС также установлен во внутренней рамке двухосного карданова подвеса так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым положением направления линии визирования интегрированного антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса, при этом направление вектора кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса, причем все три однокомпонентных измерителя соответствующих проекций вектора кажущегося линейного ускорения установлены во внутренней рамке двухосного карданова подвеса так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения, при этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением направления линии визирования интегрированного антенного устройства, зеркало которого выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании интегрированного антенного устройства, и шарнирно соединено двумя тягами механического координатора соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса зеркала интегрированного антенного устройства, первый вход которого соединен информационной линией связи с первых выходом ЦВУ, первый вход ЦВУ соединен информационной линией связи с первым выходом интегрированного антенного устройства, второй, третий, четвертый и пятый выходы которого соединены соответственно с третьим, четвертым, пятым и шестым входами ЦВУ, на второй вход ЦВУ по информационной линии связи поступает информационный массив сигналов начальных сферических координат заданного ОВ от внешнего источника информации, второй, третий, четвертый, пятый и шестой выходы ЦВУ являются выходами инерциального дискриминатора сигналов пеленгования заданного ОВ.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ | 2008 |
|
RU2360204C1 |
| УГЛОВОЙ ДИСКРИМИНАТОР | 2002 |
|
RU2202806C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 2000 |
|
RU2189056C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| JP 2003227698 A, 15.08.2003 | |||
| US 5917442 A, 29.06.1999. | |||

