Предлагаемые изобретения относятся к системам автосопровождения объекта визирования (ОВ), а также к бортовым системам самонаведения (БССН) подвижных носителей, имеющих в своем составе инерциальную измерительную систему, в частности инерциальный измеритель параметров вектора визирования (ИИПВВ), выполняющий функции инерциального дискриминатора сигналов пеленгованных заданного ОВ в замкнутой системе инерциального автосопровождения заданного ОВ, и радиолокационную систему автосопровождения ОВ. Указанные системы содержат устройства с изменяющейся ориентацией направления зеркала и максимума диаграммы направленности антенны, а именно поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя.
Предлагаемые технические решения предназначены для автосопровождения ОВ по сигналам рассогласования по дальности и по направлению, характеризующимся параметрами инерциального и радиолокационного пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в единой базовой антенной системе координат при перемещении подвижного носителя и его сближения с ОВ.
Предлагаемые технические решения могут быть применены в интегрированных комплексированных БССН в составе системы управления подвижных носителей в автономном и совместном режиме их работы.
Важной задачей, которую решают предлагаемые изобретения, является обеспечение повышенных
- точности и помехоустойчивости, а также помехозащищенности автосопровождения ОВ;
- тактико-технические характеристики интегрированных комплексированных БССН в составе систем управления подвижных носителей.
Известны способы и схемы объединения традиционных систем инерциальной навигации (ИНС) с системами, построенными на иных физических принципах в составе комплексированных систем навигации. Так, например, в книге В.П. Селезнева «Навигационные устройства». - М.: Машиностроение, 1974 г. - 600 с. рассматривается в качестве корректирующих систем, измеряющих те же навигационные параметры, что и традиционные ИНС, такие как доплеровский измеритель скорости, радиовысотомер и другие радиотехнические измерители, например радиолокационные станции, а также астрономические системы. В книге В.Д. Андреева «Теория инерциальной навигации. Корректируемые системы». - М.: Наука, 1967 г. - 648 с. рассматривается, в частности, коррекция традиционной ИНС по информации высотомера. В книге О.Н. Анучина, Г.И. Емельянцева «Интегрированные системы ориентации и навигации для морских подвижных объектов». - М., ГНЦ РФ - ЦНИИ «Электроприбор». - СПб, 2003. - 390 с. рассматривается в качестве базовых корректирующих систем система спутниковой навигации GPS/ГЛОНАСС и электронная картографическая навигационно-информационная система.
Известны также способы и схемы комплексирования традиционных ИНС и радиотехнических следящих систем, т.е. систем автосопровождения объекта визирования радиолокационной головки самонаведения (РЛГСН). Например, в книге С.В. Первачева, А.А. Валуева, В.М. Чиликина «Статистическая динамика радиотехнических следящих систем». - М.: Советское радио, 1973 г. - 488 с. рассмотрены на с.347÷405:
- способ и схема компенсации,
- способ и схема фильтрации,
- способ и схема с введением дополнительной информации внутрь кольца слежения.
В течение последних десятилетий, как показывает проведенный анализ состояния в области проектирования и создания БССН, выполнен большой объем исследований и имеется значительное количество публикаций, содержащих научную информацию, методы и технические решения практической реализации интегрированных навигационных систем. Однако до настоящего времени не сформировались подходы к разработке интегрированных комплексированных БССН подвижных носителей разового действия на основе инерциальной измерительной системы. Предлагаемое изобретение восполняет указанный пробел в этом направлении развития техники по созданию высокоточных подвижных носителей с повышенными ТТХ.
Кроме того, известны способ и схема "выделения составляющих сигнала ошибки - управляющих напряжений каналов угла наклона и азимута, которые содержат информацию о составляющих угла рассогласования по наклону и по азимуту", изложенные, например, в книге В.М. Артамонова "Следящие системы радиолокационных станций автоматического сопровождения и управления." - Л.: Судостроение, 1968 г. - с.12÷19. В данной книге отмечается, что "выделение управляющих напряжений каналов угла наклона и азимута основано на применении фазовых детекторов, реализующих принцип сравнения фазы и амплитуды сигнала ошибки, несущих информацию о положении сопровождаемого объекта визирования с опорным напряжением соответствующего канала, которое характеризует положение диаграммы направленности в пространстве в каждый момент времени. Опорные напряжения наклона и азимута вырабатываются в генераторе опорных напряжений" (с.16). Кроме того, в этой книге рассматриваются способ и схема "формирования составляющих сигнала ошибки в следящей системе автоматического сопровождения по напряжения моноимпульсивного типа" (с.12÷24).
Известны также следующие технические решения.
1. Угловой дискриминатор (RU 2202806 C1, G01S 13/44, 13/68, 7/36, 29.05.2002). "Сущность изобретения заключается в том, что содержит приемно-передающую антенну с формирователем суммарного и разностного сигналов, которые образуют антенный блок, к суммарному выходу которого подключены последовательно соединенные антенный переключатель и приемник опорного сигнала, а к разностному выходу подключены последовательно соединенные антенный переключатель и приемник измерительного канала, передатчик, блок автоматической регулировки усиления, вход которого соединен с выходом приемника опорного сигнала, а выход подключен к входам регулировки приемников опорного и измерительного каналов, синхронный детектор, выходы которого соединены с выходами приемников опорного и измерительного каналов, а выход является выходом сигнала углового рассогласования, направленный ответвитель, включенный между выходом передатчика и вторым входом антенного переключателя, соединенного с суммарным выходом антенного блока, и последовательно соединенные фазовращатель, вход которого подключен ко второму выходу направленного ответвителя, и дополнительная передающая антенна, конструктивно входящая в состав антенного блока, имеющая поляризацию, ортогональную поляризации основной приемопередающей антенны, что обеспечивает пространственный поворот плоскости поляризации результативного зондирующего сигнала, при этом кросс-поляризационная помеха, ортогональная по поляризации зондирующему сигналу, не будет таковой для основной приемопередающей антенны и, как следствие, будет действовать на угловой дискриминатор…".
2. Электронная система самонаведения (JP 3519636 В2, 7 G01S 13/66, 13/88, F41G 7/24, G01D 1/12, 19.04.2004), в которой "отраженный от цели сигнал через антенну 3 и циркулятор 2 поступает в приемный блок 3 радара и далее в блок 5 угловых измерений, в котором вычисляют угол, образованный между радиолучом радара и целью. Полученное значение угла затем передается в блок 6 пространственной стабилизации.
3. Инерциальная система управления (WO 4097329 A1, 7 F41G 7/36, 11.11.2004), "которая функционирует без применения гироскопов, имеет ортогональную систему координат и содержит три акселерометра и приемник глобальной системы позиционирования, компьютер и программное обеспечение. Акселерометры обеспечивают получение данных об ускорениях, измеренных в направлении осей x, y, z соответственно. Приемник глобальной системы позиционирования обеспечивает получение данных о координатах. Компьютер обеспечивает хранение данных о координатах снаряда и преобразует данные об ускорениях в навигационные координаты. Программное обеспечение компьютера обеспечивает получение информации об углах курса, тангажа и крена".
4. Регулирующее устройство системы наведения ракеты (JP 3031049 В2, 5288497 А 7, F41G 7/22, F42B 15/01, G01S 13/88, 06.04.1992), в котором "данные об ошибке наведения получаются как разность между сигналом с датчика 9, установленного на антенне 7 и определяющего ее угловое положение, и сигналом с датчика, определяющего угол крена и установленного на платформе 10. Корректирующий сигнал, соответствующий ошибке наведения, формируется в блоке 12 и используется для компенсации ошибочных составляющих, измеренных датчиком 2, который определяет угловую ошибку. Корректирующий сигнал вычитается из сигнала угловой ошибки, в результате чего может быть получен с высокой точностью сигнал для системы наведения, который не содержит ошибок обтекателя головки самонаведения".
Рассмотренные технические решения задачи объединения традиционных систем инерциальной навигации (платформенных - ИНС или бесплатформенных - БИНС) и, например, радиолокационной головки самонаведения (РЛГСН) в составе комплексной системы, кроме указанных выше недостатков, обладают еще и тем существенным недостатком, что ИНС (или БИНС) формулируют информацию о навигационных параметрах подвижного носителя и об его угловой ориентации в пространстве. По этой информации формируются сигналы заданного направления зеркала антенны РЛ ГСН относительно корпуса подвижного носителя. При этом ошибки ориентации зеркала антенны обусловлены погрешностями ИНС и следящих приводов зеркала антенны, а также деформациями и вибрациями корпуса подвижного носителя. Интегрированное антенное устройство, входящее, кроме цифрового вычислительного устройства (ЦВУ), в состав инерциального дискриминатора сигналов пеленгования ОВ, содержит двухосный карданов подвес зеркала антенны, несущий во внутренней рамке управляемый трехстепенной гироскоп и гироинерциальные датчики пространственного движения зеркала. Такое интегрированное посторенние данного антенного устройства обеспечивает повышение точности гироинерциальных датчиков за счет уменьшения динамичности диапазонов измеряемых ими величин. Одновременно при этом уменьшаются динамические ошибки следящих приводов зеркала антенны, а также габариты и масса интегрированной комплексированной БССН.
Таким образом, ни один из рассмотренных аналогов не является близким по технический сущности и по своему значению и не может быть принят в качестве прототипа предлагаемых технических решений.
Целью заявляемых технических решений (способа и системы для его осуществления) является комплексирование сигналов пеленгования ОВ инерциального и радиолокационного дискриминаторов в двух взаимно перпендикулярных плоскостях пеленгования в единой базовой антенной системе координат с обеспечением повышенных точности и помехоустойчивости, а также помехозащищенности автосопровождения ОВ и тактико-технических характеристик интегрированной комплексированной БССН в составе системы управления подвижного носителя.
Сущность изобретения заключается в том, что по предлагаемому способу во время предстартовой подготовки подвижного носителя формулируют сигналы начального целеуказания (НЦУ), пропорциональные начальным значениям наклонной дальности, угла наклона и азимута взаимного положения подвижного носителя и заданного ОВ. Одновременно формулируют штатный массив сигналов НЦУ и сигналов начальной выставки (НВ) инерциального пеленгования заданного ОВ, пропорциональных начальным значениям угла наклона и азимута заданного ОВ относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат Ох1, y1, z1, связанной с центром масс подвижного носителя (фиг.4), наклонной дальности до заданного ОВ и наклонной скорости сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем в предстартовом положении рыскания, тангажа и крена (фиг.5) подвижного носителя вместе с основанием интегрированного антенного устройства, а также пропорциональных начальным значениям проекций вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1), декартовых координат подвижного носителя в местной горизонтальной системе координат Оξηζ (фиг.1), долготы и географической широты подвижного носителя. Затем преобразуют сигналы НВ инерциального пеленгования заданного ОВ в сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг.2), углов визирования заданного ОВ соответственно, горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Оξηζ (фиг.1), параметров пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат Oxyz (фиг.2), направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат 







Сущность изобретения заключается также и в том, что система, осуществляющая способ функционально, состоит (фиг.6) из контура инерциального автосопровождения, в который инерциальный угловой дискриминатор (ИНУД) сигналов пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат и четвертый сумматор (Σ4), из контура радиолокационного автосопровождения, в который входил и радиолокационный угловой дискриминатор (РЛУД) сигналов пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, первый сумматор (Σ1), второй сумматор (Σ2), первая корректирующая цепь (КЦ1), из контура фильтрации и компенсации, содержащего вторую корректирующую цепь (КЦ2), второй элемент сравнения (ЭС2), фильтр нижних частот (ФНЧ), третий сумматор (Σ3), из контура гиростабилизации и управления, содержащего динамическое звено, охваченное жесткой отрицательной связью. Кроме того, система содержит первый элемент сравнения ЭС1, ключ (КР) переключения режима работы системы. Кроме того, система функционально содержит информационную линию связи, по которой из интегрированного антенного устройства в ИНУД вводится информационный массив сигналов проекций вектора 



Зеркало выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании ИАУ. При этом зеркало шарнирно соединено тягами механического координатора ИАУ соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса ИАУ так, что расстояние между каждым из шарниров на задней поверхности зеркала и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и внутренней рамке двухосного карданова подвеса ИАУ, и центром поворота этих рамок. ИАУ также включает в свой состав электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, а также электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости 




Введение указанных признаков в способ и в систему для его осуществления обеспечивает комплексирование сигналов пеленгования ОВ инерциального и радиолокационного дискриминантов в двух взаимно перпендикулярных плоскостях xOy и xOz его пеленгования в единой базовой антенной системе координат в замкнутых контурах интегрированной косплексированной системы автосопровождения ОВ. При этом обеспечиваются повышенные точность и помехоустойчивость, а также помехозащищенность автосопровождения ОВ и тактико-технические характеристики БССН в составе системы управления подвижного носителя.
Из уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками технических решений задачи комплексирования сигналов пеленгования ОВ инерциального и радиолокационного дискриминантов в двух взаимно перпендикулярных плоскостях его пеленгования в единой базовой антенной системе координат в замкнутых контурах интегрированной комплексированной системы автосопровождения ОВ.
Поэтому предложенные технические решения (способ и система, осуществляющая его) соответствуют условиям изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
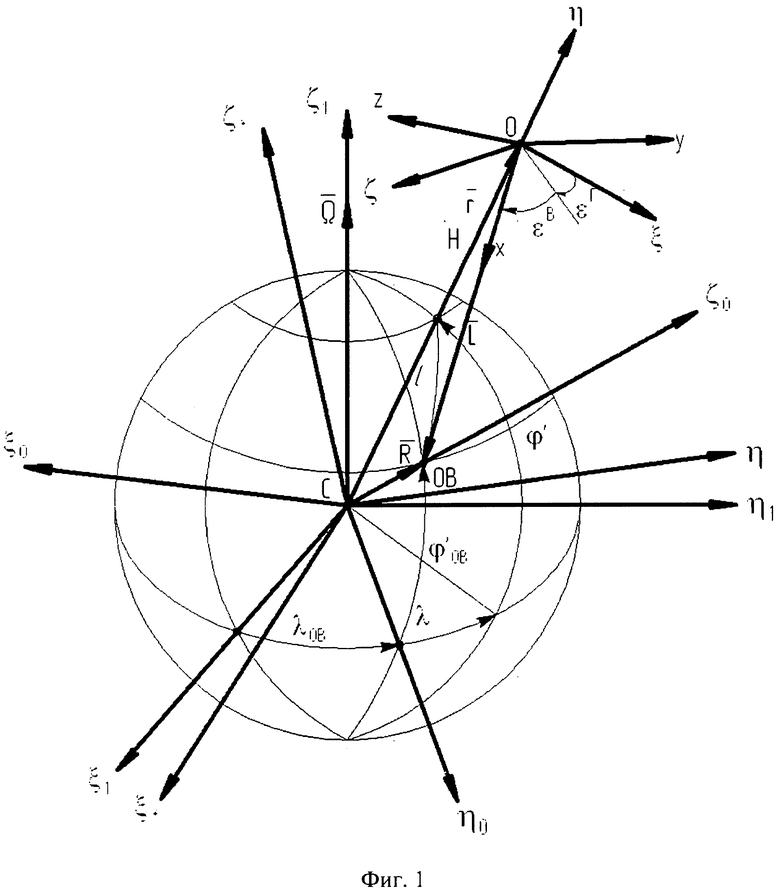
- На фиг.1 - принятые системы координат;
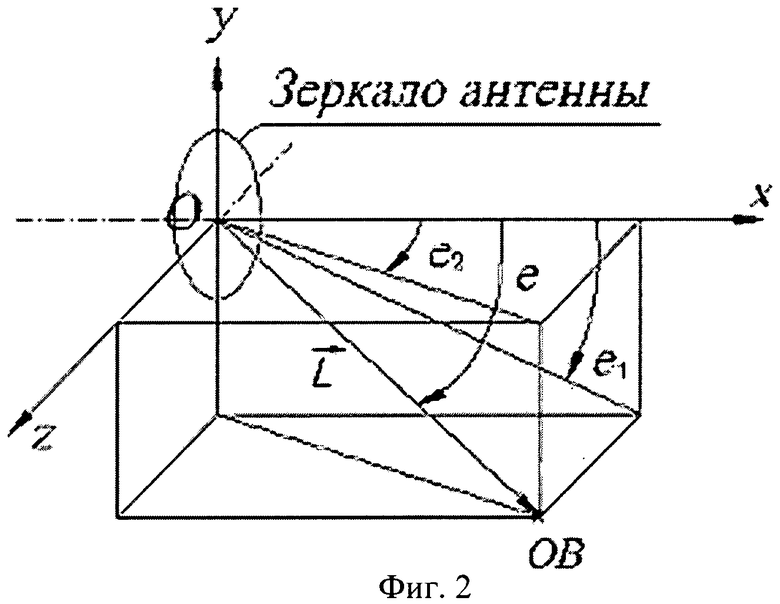
- На фиг.2 - положение вектора 
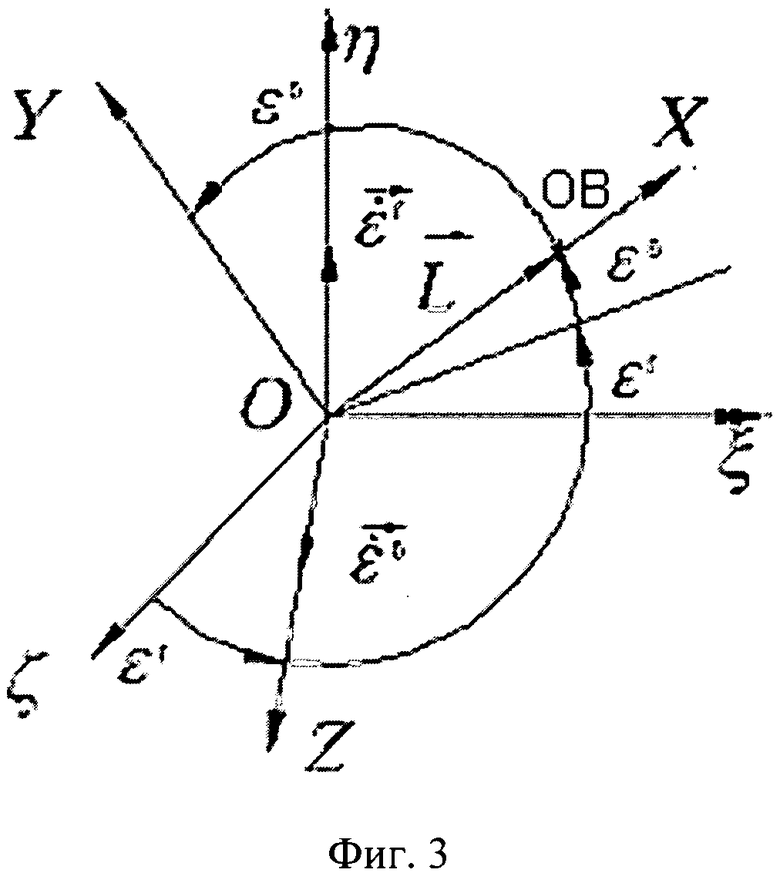
- На фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Оξηζ;
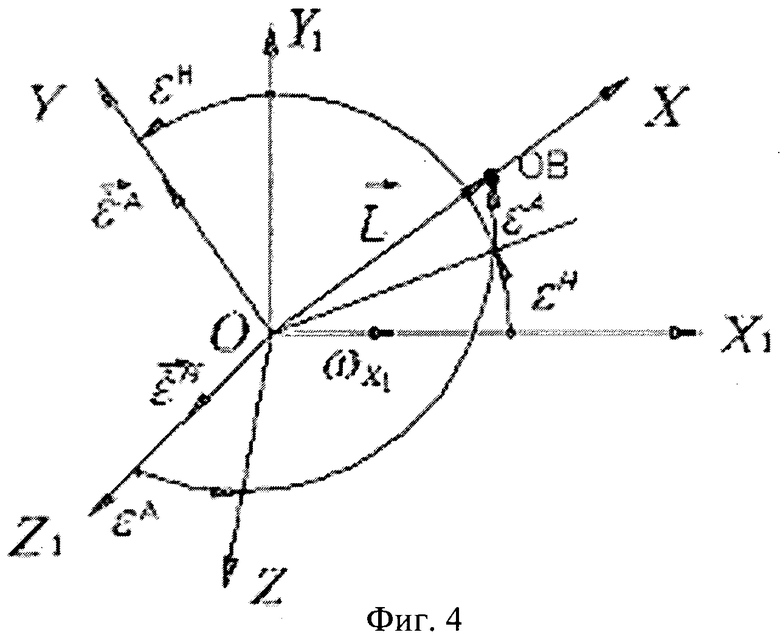
- На фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной с центром масс подвижного носителя системы координат Ox1y1z1;
- На фиг.5 - взаимное положение связанной с центром масс подвижного носителя системы координат Ox1y1z1 и местной горизонтальной системы координат Oξηζ;
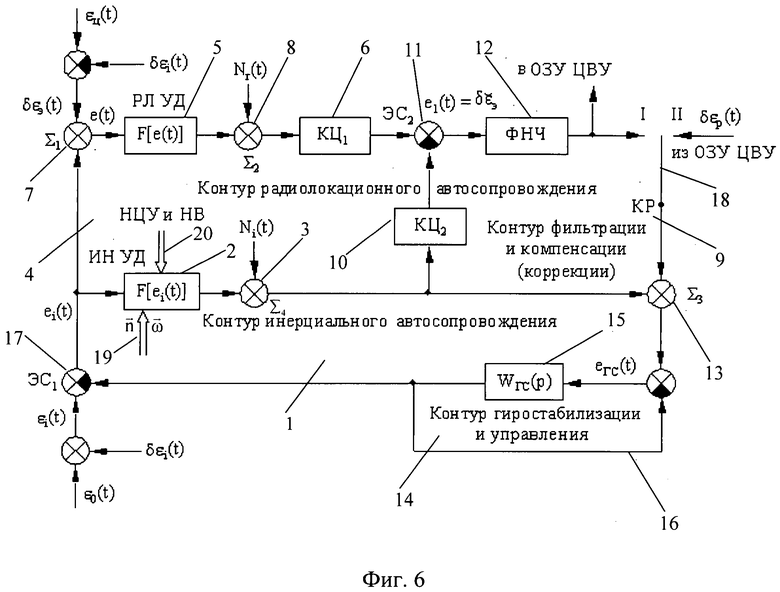
- На фиг.6 - функциональная схема комплексирования сигналов пеленгования объекта визирования инерциального и радиолокационного дискриминаторов в единой базовой антенной системе координат в одноканальной замкнутой системе его автосопровождения;
- На фиг.7 - структурная схема интегрированной комплексированной системы автосопровождения объекта визирования;
- На фиг.8 - принципиальная кинематическая схема интегрированного антенного устройства.
Предлагаемый способ характеризуется тем, что во время предстартовой подготовки подвижного носителя формируют сигналы НЦУ, пропорциональные начальным значениям L0 наклонной дальности, угла наклона 










- проекций 



- углов 

- параметров 

- направляющих косинусов 
В момент старта подвижного носителя обновление сигналов НЦУ и НВ прекращают и во время начала его движения по траектории вместе с основанием интегрированного антенного устройства (фиг.7, фиг.8) одновременно измеряют сигналы, пропорциональные проекции 











- проекций Vx, Vy, Vz вектора 
- наклонной дальности L и наклонной скорости 
- рассогласования ΔL между текущим значением наклонной дальности L сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем и заданным начальным значением наклонной дальности L0 до заданного ОВ;
- параметров e1i и e2i инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях xOy и xOz его пеленгования в базовой антенной системе координат Oxyz;
- направляющих косинусов βij (где i, j=1, 2, 3) взаимного текущего углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат
где L0=Lmax - наклонная дальность пуска подвижного носителя до заданного ОВ;







где для неподвижного заданного OB R=const и, принимая угловую скорость суточного вращения Земли Ω=const,
причем
и
Таким образом, реализуя изложенные выше алгоритмы, формируют сигнал, пропорциональный рассогласованию
между начальным текущим значением наклонной дальности L сближения с заданным ОВ подвижного носителя вместе с основанием интегрированного антенного устройства и значением наклонной дальности L0 до заданного ОВ, по которому осуществляют инерциальное автосопровождение заданного ОВ по дальности.
Таким образом, формируют инерциальное выделение (различение) сигналов пеленгования заданного ОВ.
Одновременно при радиолокационном контакте (автосопровождении) с ОВ принимают отраженные от облучаемого ОВ СВЧ-сигналы двумя парами приемных каналов облучателя интегрированного антенного устройства. Пары приемных каналов облучателя переключают четырьмя управляющими сигналами сканирования K1, 











Сформированные сигналы детектируют и соответствующие им видеосигналы (ВС) преобразуют в цифровой код, а затем под управлением четырех управляющих сигналов сканирования распределяют по четырем регистрам (по соответствующим адресам оперативной памяти цифрового вычислительного устройства) соответствующих суммарно-разностных диаграмм. Далее после их вычитания формируют на выходе АВППМ цифровые коды сигналов е1 и е2 радиолокационного пеленгования ОВ в двух взаимно перпендикулярных плоскостях xOy и xOz его пеленгования в базовой антенной системе координат Oxyz. Таким образом, формируют радиолокационное выделение (различение) сигналов пеленгования ОВ.
Во время перемещения подвижного носителя при наличии или отсутствии радиолокационного автосопровождения ОВ формируют сигнал, пропорциональный текущему значению угловой координаты εi(t) OB, обусловленной собственным перемещением подвижного носителя относительно ОВ и характеризуемой соотношением (фиг.6)

где ε0(t) - начальное значение угловой координаты ОВ в момент старта подвижного носителя;
δεi(t) - ошибка (помеха) инерциального измерения угловой координаты ОВ.
Сформированный сигнал, пропорциональный текущему значению угловой координаты εi(t), отрабатывают, при этом осуществляют формирование сигналов ei(t) инерциального пеленгования ОВ, тем самым обеспечивают инерциальное автосопровождение ОВ (фиг.6).
При наличии радиолокационного автосопровождения ОВ одновременно формируют сигнал, пропорциональный эквивалентной погрешности δεЭ(t) определения угловой координаты εi(t) OB, которая характеризуется соотношением (фиг.6):

где εЦ(t) - угловое смещение ОВ, обусловленное его собственным движением.
Сформированный сигнал, пропорциональный текущему значению эквивалентной погрешности δεЭ(t) определения угловой координаты εi(t) ОВ, отрабатывают, при этом осуществляют формирование сигналов радиолокационного пеленгования ОВ, тем самым обеспечивают радиолокационное автосопровождение ОВ (фиг.6). При этом формируют сигнал пеленгования e(t) OB при комплексировании сигналов инерциального и радиолокационного пеленгования ОВ, который характеризуется соотношением (фиг.6):

где сигнал ei(t) инерциального пеленгования ОВ характеризуется соотношением (фиг.6):

причем 
Так как операторский коэффициент передачи (ОКП) корректирующей цепи КЦ1, соответствующий ОКП пеленгационного устройства КПУ(р), характеризующему динамические свойства пеленгационного устройства при радиолокационном автосопровождении ОВ, известен, то корректирующую цепь КЦ2 реализуют с операторным коэффициентом передачи, равным

где S - крутизна дискриминаторной характеристики радиолокационного пеленгационного устройства (дискриминатора).
При этом полагая, что
т.е. радиочастотная помеха, приведенная ко входу радиолокационного углового дискриминатора, формируют сигнал сравнения (вычитания) сигналов радиолокационного и инерциального пеленгования ОВ, пропорциональный величине:

который с учетом выполнения условия инвариантности (12) сигнала 


Полученный сигнал 





Сигнал, пропорциональный точной оценке 


КФНЧ(p) - ОКП фильтра нижних частот, параметры которого выбирают так, чтобы обеспечить подавление помехи n(t) и воспроизвести сигнал, пропорциональный ошибке (помехе) 
Далее отрабатывают сигнал, пропорциональный текущему значению величины угловой координаты εi(t).
Вследствие отработки сигнала εi(t) формируют сигнал, характеризующий измеренное значение угловой координаты 

где КГС(р) - ОКП, характеризующий динамические свойства соответствующего канала гиростабилизации и управления направлением линии (вектора) визирования ОВ, т.е. динамические свойства контура слежения за угловой координатой εi(t) OB.
При полосе частот пропускания контура гиростабилизации и управления, равной (10…20) Гц, т.е. (фиг.6)
ошибка измерения угловых координат εi(t) OB при комплексировании сигналов инерциального и радиолокационного пеленгования ОВ определяется следующим соотношением:

где ε(t) - истинное значение измеряемой угловой координаты ОВ.
Так как диапазон сигнала δεЭ(t) значительно уже, чем сигнал, пропорциональный величине:

где εД(t) - длиннопериодическая составляющая угловой координаты ОВ, обусловленная перемещением центра масс подвижного носителя;
δεK(t) - аддитивная ошибка гиростабилизации направления линии (вектора) визирования ОВ от короткопериодических колебаний подвижного носителя относительно своего центра масс,
то сигнал, пропорциональный эквивалентной погрешности определения угловой координаты εi(t) OB, отфильтровывают с минимальной ошибкой, что обеспечивает существенно высокую точность определения угловых координат ОВ при реализации предлагаемого способа комплексирования соответствующих сигналов инерциального и радиолокационного пеленгования ОВ.
Система, осуществляющая способ, состоит из контура 1 инерциального автосопровождения, в который инерциальный угловой дискриминатор (ИНУД) 2 сигналов пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат и четвертый сумматор (Σ4) 3, из контура 4 радиолокационного автосопровождения, в который входил и радиолокационный угловой дискриминатор 5 (РЛУД) сигналов пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, первый сумматор (Σ1) 7, второй сумматор (Σ2) 8, первая корректирующая цепь (КЦ1) 6, из контура фильтрации и компенсации, содержащего вторую корректирующую цепь (КЦ2) 10, второй элемент сравнения (ЭС2) 11, фильтр нижних частот (ФНЧ) 12, третий сумматор (Σ3) 13, из контура гиростабилизации и управления 14, содержащего динамическое звено 15, охваченное жесткой отрицательной связью 16. Кроме того, система содержит первый элемент сравнения ЭС 17, ключ (КР) 18 переключения режима работы системы. Кроме того, система функционально содержит информационную линию связи 19, по которой из интегрированного антенного устройства 21 в ИНУД 2 вводится информационный массив сигналов проекций вектора 








Работа предлагаемой системы, осуществляющей заявленный способ, выполняется следующим образом.
При предстартовой подготовке подвижного носителя формируют штатный массив сигналов ЦВУ и сигналов НВ инерциального пеленгования заданного ОВ, который по информационной линии связи 20 по стандартному цифровому каналу из аппаратуры, внешней по отношению к заявленной системе, поступает на информационный вход 9 ЦВУ 24, где сигналы информационного массива согласно соответствующим алгоритмам преобразуются в сигналы, пропорциональные начальным значениям:
- углов 

- проекций 



- параметров пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.2);
- направляющих косинусов 
В момент старта подвижного носителя обновление сигналов НЦУ и НВ прекращается. Во время начала его движения по траектории вместе с основанием 30 ИАУ 21 измеренные акселерометрами 39, 40, 41 (фиг.8) сигналы, пропорциональные проекциям 









Выделенные ИНУД 2 и РЛУД 5 соответственно сигналы ei(t) и e(t) пеленгования ОВ в единой базовой антенной системы координат в двух взаимно перпендикулярных плоскостях xOy и xOz его пеленгования согласно алгоритмам (8)…(19) в ЦВУ 24 корректируются, сравниваются и формируются разностные сигналы 






В ЦВУ 24 узкополосные сигналы е1 и е2 управления направлением линии (вектора) визирования на ОВ преобразуются согласно алгоритмам учета переменной электрической редукции в узкополосные сигналы 




















характеризующие поворот по углу наклона εН и по азимуту εA линии (вектора 
Таким образом, отрабатываются и интегрируются сигналы пеленгования ОВ в двух взаимно перпендикулярных плоскостях xOy и xOz пеленгования в базовой антенной системе координат Oxyz в замкнутой интегрированной комплексированной системе автосопровождения ОВ, осуществляющей заявленный способ.
Одновременно с третьего информационного выхода ЦВУ 24 по информационной линии связи 67 в аппаратуру, внешнюю по отношению к заявленной системе, поступает массив сигналов, необходимых для формирования сигналов самонаведения, пропорциональных текущим значениям угловой скорости поворота линии (вектора) визирования в вертикальной плоскости 

а также сигналов, пропорциональных текущим значениям наклонной дальности L до ОВ и наклонной скорости 
ЦВУ 24 заявляемой системы включает в свой состав аналого-цифровые преобразователи входных сигналов, процессор обработки СВЧ-сигналов и сигналов акселерометров и гироскопических приборов, оперативную и долговременную память, цифроаналоговые преобразователи выходных сигналов, взаимосвязанные входы-выходы по каналам информационного обмена между собой, с внешним источником информации, интегрированным антенным устройством 21, антенно-волноводным приемопередающим модулем 22. ЦВУ 24 обеспечивает хранение штатного информационного массива сигналов НЦУ и НВ, введенного от внешнего источника информации по информационной линии связи 20. Кроме того, ЦВУ 24 реализует математическое и программное обеспечение заявленного способа комплексирования сигналов пеленгования ОВ инерциального и радиолокационного дискриминаторов и интегрированной комплексированной системы автосопровождения ОВ в целом, осуществляющей данный способ.
Таким образом, предлагаемые технические решения (способ и система для его осуществления) обеспечивают достижение положительного эффекта, заключающегося в следующем:
- учет изменения динамических характеристик контура 4 радиолокационного автосопровождения ОВ, рассматриваемого как фильтр с известным операторным коэффициентом передачи КАС(р) (фиг.6);
- уменьшение ошибки e(t) (19), измеряемой радиолокационным угловым дискриминатором 5 (фиг.6), что способствует повышению помехоустойчивости схемы комплексирования сигналов пеленгования ОВ инерциального 2 и радиолокационного 5 дискриминаторов, и одновременно выполнение условия инвариантности (12) динамической ошибки комплексированной системы автосопровождения ОВ по отношению к траекторному изменению входного сигнала ei(t) (фиг.6);
- сужение полосы пропускания контура 4 радиолокационного автосопровождения ОВ, что способствует повышению его помехоустойчивости и ослаблению нелинейных эффектов взаимодействия сигналов и мешающих воздействий, т.е. внешних флюктуационных помех и внутренних шумов, на входе контура 4 радиолокационного автосопровождения ОВ (фиг.6), что обуславливает уменьшение его динамической ошибки;
- использование с наибольшей эффективностью информации акселерометров 39, 40, 41 и гироскопических приборов 37, 38, установленных во внутренней рамке 32 двухосного карданова подвеса 27 зеркала 25 интегрированного антенного устройства 21 инерциального дискриминатора 2 сигналов пеленгования ОВ (фиг.7, фиг.6);
- повышение точности инерциального пеленгования ОВ за счет использования в комплексированной системе его автосопровождения точной оценки 
Результаты проведенных исследований подтверждают реализуемость предлагаемых способа и системы для его осуществления и обеспечение ими значительного повышения тактико-технических характеристик интегрированной комплексированной БССН подвижного носителя.



Изобретение относится к системам автосопровождения объекта визирования (ОВ), а также к бортовым системам самонаведения (БССН) подвижных носителей, имеющих в своем составе инерциальную измерительную систему. Достигаемый технический результат - повышение точности и помехоустойчивости, а также помехозащищенности автосопровождения ОВ и тактико-технических характеристик интегрированных комплексированных БССН в составе систем управления подвижных носителей. Сущность изобретения заключается в том, что по первоначально сформированному штатному информационному массиву сигналов начальной выставки инерциального пеленгования заданного ОВ и по измеряемым сигналам, пропорциональным текущим значениям проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования ОВ на соответствующие оси базовой антенной системы координат (БАСК), формируют сигналы, пропорциональные текущим значениям параметров инерциального пеленгования заданного ОВ, которые характеризируются текущим значением рассогласования между начальным значением наклонной дальности до заданного ОВ и текущим значением наклонной дальности сближения с заданным ОВ основания интегрированного антенного устройства (АУ) вместе с подвижным носителем, рассогласования, т.е. составляющие ошибки между направлением вектора визирования с заданного ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в БАСК. Одновременно при радиолокационном автосопровождении ОВ по принимаемым сигналам, отраженным от ОВ, облучаемого зондирующими СВЧ-сигналами, формируют сигналы радиолокационного пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в БАСК. Сигналы радиолокационного пеленгования ОВ характеризуют соответственно текущие значения рассогласования, т.е. составляющие ошибки между направлением оптической оси зеркала интегрированного АУ и текущим значением направления максимума диаграммы направленности интегрированного АУ при излучении зондирующих СВЧ-сигналов в направлении на ОВ. Сформированные сигналы радиолокационного и инерциального пеленгования соответственно корректируют, сравнивают и формируют разностный сигнал, который подвергают низкочастотной фильтрации, производят его адаптивное помехоустойчивое статистическое оценивание. При этом подавляют широкополосные помехи радиолокационного пеленгования ОВ, выделяют узкополосные помехи оценивания разностного сигнала, затем формируют сигнал, пропорциональный точной оценке разностного сигнала, для компенсации узкополосной помехи, обусловленной ошибкой инерциального пеленгования ОВ. Для этого сигнал, пропорциональный точной оценке, суммируют с сигналом инерциального пеленгования ОВ, вследствие чего осуществляют компенсацию узкополосной помехи, т.е. ошибки, в результате формируют отфильтрованный сигнал управления направлением на ОВ линии визирования, который отрабатывают с минимальной ошибкой. При этом сигнал, пропорциональный минимальной ошибке, определяют как разность между сигналом, пропорциональным эквивалентной погрешности измерения угловой координаты ОВ, и сигналом, пропорциональным компенсирующей точной оценке разностного сигнала. Причем сигнал, пропорциональный эквивалентной погрешности измерения угловой координаты ОВ, пропорционален разности углового смещения, обусловленного собственным движением, и узкополосной помехи, т.е. ошибки инерциального пеленгования ОВ. Осуществление способа обеспечивается заявленной интегрированной комплексированной системой, состоящей из контура инерциального автосопровождения, в который входят инерциальный угловой дискриминатор сигналов пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в БАСК и четвертый сумматор из контура радиолокационного автосопровождения, в который входят радиолокационный угловой дискриминатор пеленгования ОВ в двух взаимно перпендикулярных плоскостях его пеленгования в БАСК, первый сумматор, второй сумматор, первая корректирующая цепь из контура фильтрации и компенсации, содержащего вторую корректирующую цепь, второй элемент сравнения, фильтр нижних частот, третий сумматор из контура фильтрации и компенсации, содержащего вторую корректирующую цепь, второй элемент сравнения, фильтр нижних частот, третий сумматор из контура гиростабилизации и управления, содержащего динамическое звено, охваченное жесткой отрицательной обратной связью. Кроме того, система содержит первый элемент сравнения, ключ переключения режимов работы системы, информационную линию связи инерциального углового дискриминатора с внешней аппаратурной подготовки и управления пуском подвижного носителя, информационную линию связи инерциального углового дискриминатора с интегрированным АУ. Система также включает в свой состав интегрированные АУ, антенно-волноводный и приемно-передающий модуль, цифровое вычислительное устройство (ЦВУ). Интегрированное АУ содержит зеркало с облучателем, имеющее возможность поворота в двух взаимно перпендикулярных плоскостях относительно облучателя, жестко установленного на основании интегрированного устройства, двухосный карданов подвес, шарнирно соединенный с зеркалом, несущий во внутренней рамке установленные соответствующим образом гироинерциальные датчики сигналов пространственного движения зеркала, датчики сигналов поворота наружной и внутренней рамок двухосного карданова подвеса, электронные узлы гиростабилизации и управления направлением зеркала на ОВ, усилитель сигналов обратной связи в соответствующих каналах двухканального гироскопического датчика сигналов угловой скорости, электронные узлы формирования управляющих сигналов, пропорциональных задаваемой угловой скорости соответственно поворота зеркала в горизонтальной и в вертикальной плоскостях, электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, пропорционального проекции вектора абсолютной угловой скорости поворота зеркала на поперечную ось системы координат, связанной с зеркалом. Антенно-волноводный и приемно-передающий модуль, соединенный с облучателем, содержит соединенные соответствующим образом между собой суммарно-разностный преобразователь СВЧ-сигналов, волноводно-коммутирующее устройство, приемопередатчик, которые информационной линией связи соединены с соответствующим выходом ЦВУ, по которой осуществляется взаимодействие модуля с ЦВУ. ЦВУ содержит аналого-цифровые преобразователи входных сигналов, процессор обработки СВЧ-сигналов и сигналов гироинерциальных датчиков (акселерометров и гироприборов), оперативную и долговременную память, цифроаналоговые преобразователи выходных сигналов, взаимосвязанные входы-выходы по каналам информационного обмена между собой, с внешним источниками информации, интегрированным устройством, антенно-волновым и приемно-передающим модулем. ЦВУ реализует математическое и программное обеспечение заявленного способа комплексирования сигналов пеленгования ОВ инерциального и радиолокационного дискриминаторов и интегрированной комплексированной системы автосопровождения ОВ в целом, осуществляющей способ. 2 н.п. ф-лы, 8 ил.
1. Способ комплексирования сигналов пеленгования объекта визирования инерциального и радиолокационного дискриминантов, характеризующийся тем, что по предлагаемому способу во время предстартовой подготовки подвижного носителя формируют сигналы начального целеуказания, пропорциональные начальным значениям наклонной дальности, углы наклона и азимута взаимного положения подвижного носителя и заданного объекта визирования, одновременно формируют штатный массив сигналов начального целеуказания и начальной выставки инерциального пеленгирования заданного объекта визирования, пропорциональных начальным значениям угла наклона и азимута заданного объекта визирования относительно основания интегрированного антенного устройства, жестко установленного внутри корпуса подвижного носителя, в системе координат, связанной с центром масс подвижного носителя, наклонной дальности до заданного объекта визирования и наклонной скорости сближения с заданным объектом визирования основания интегрированного антенного устройства вместе с подвижным носителем в предстартовом положении, рыскания, тангажа и крена подвижного носителя вместе с основанием интегрированного антенного устройства, а также пропорциональных начальным значениям проекций вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат, декартовых координат подвижного носителя в местной горизонтальной системе координат, долготы и географической широты подвижного носителя, затем преобразуют сигналы начальной выставки инерциального пеленгования заданного объекта визирования в сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, углов визирования заданного объекта визирования соответственно в горизонтальной системе координат, параметров пеленгования заданного объекта визирования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным объектом визирования, расположенным на земной поверхности; в момент старта подвижного носителя обновление сигналов начального целеуказания и начальной выставки прекращают и во время начала его движения по траектории вместе с основанием интегрированного антенного устройства одновременно измеряют сигналы, пропорциональные текущим значениям проекции вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования заданного объекта визирования на соответствующие оси базовой антенной системы координат, по измеренным сигналам проекций с учетом сигналов начального целеуказания и начальной выставки формируют сигналы, пропорциональные текущим значениям проекций вектора линейной скорости сближения с заданным объектом визирования основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, а также сигналы, пропорциональные текущим значениям наклонной дальности и наклонной скорости сближения с заданным объектом визирования основания интегрированного антенного устройства вместе с подвижным носителем, рассогласования между начальным значением наклонной дальности до заданного объекта визирования и текущим значением наклонной дальности сближения с заданным объектом визирования основания интегрированного антенного устройства вместе с подвижным носителем, параметров инерциального пеленгования заданного объекта визирования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, направляющих косинусов взаимного текущего углового положения базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным объектом визирования, расположенным на земной поверхности, т.е. реализуют инерциальное пеленгование заданного объекта визирования; одновременно при радиолокационном автосопровождении объекта визирования принимают отраженные от облучаемого зондирующими сверхвысокочастотными сигналами объекты визирования СВЧ-сигналы двумя парами приемных каналов облучателя интегрированного антенного устройства, при этом пары приемных каналов облучателя переключают четырьмя управляющими сигналами сканирования, принятые СВЧ-сигналы подвергают суммарно-разностному преобразованию, в результате чего формируют сигнал суммарной диаграммы и два сигнала соответствующих разностных диаграмм, затем под управлением первой пары управляющих сигналов сканирования, следующих с четырехкратным периодом повторения излучения зондирующих СВЧ-сигналов, сигналы разностных диаграмм переключают, при этом, если вобуляцию выключают, то четыре управляющих сигнала сканирования следуют с регулярной частотой, если же вобуляцию включают, то четыре управляющих сигнала сканирования следуют с переменной частотой, которую изменяют по псевдослучайному закону, но в пределах четырехкратного периода повторения излучения зондирующих СВЧ-сигналов обеспечивают присутствие каждого из этих четырех управляющих сигналов сканирования, далее каждый из двух сигналов разностных диаграмм складывают с сигналов суммарной диаграммы и вычитают из него, в результате чего формируют четыре сигнала суммарно-разностных диаграмм, затем под управлением второй пары сигналов сканирования, следующих с двукратным периодом повторения излучение зондирующих СВЧ-сигналов, пропускают только один из четырех сигналов суммарно-разностных диаграмм, в результате чего за четырехкратный период повторения излучения зондирующих СВЧ-сигналов формируют четыре сигнала, т.е. два сигнала полуразностных диаграмм и два сигнала полусуммарных диаграмм, сформированные эти сигналы детектируют и соответствующие им видеосигналы преобразуют в цифровой код и затем под управлением четырех управляющих сигналов сканирования распределяют по четырем регистрам, т.е. по соответствующим адресам оперативной памяти вычислительного устройства, соответствующих суммарно-разностных диаграмм, далее, после их вычитания, формируют цифровые коды сигналов радиолокационного пеленгования объекта визирования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, т.е. реализуют радиолокационное пеленгование объекта визирования; одновременно сформированные сигналы инерциального пеленгования заданного объекта визирования, которые характеризуют рассогласования, т.е. ошибку между направлением оптической оси зеркала интегрированного антенного устройства и направлением вектора визирования заданного объекта визирования, и сформированные сигналы радиолокационного пеленгования объекта визирования при радиолокационном автосопровождении объекта визирования, которые характеризуют рассогласования, т.е. ошибку между направлением оптической оси зеркала интегрированного антенного устройства и направлением линии визирования, т.е. направлением максимума диаграммы направленности интегрированного антенного устройства при излучении зондирующих СВЧ-сигналов в направлении на объект визирования, соответственно корректируют, сравнивают и формируют разностный сигнал, содержащий внешние широкополосные радиочастотные помехи и внутренние шумы радиолокационного пеленгования объекта визирования, а также помеху, т.е. ошибку, которая обусловлена собственным пространственным перемещением подвижного носителя и которую при радиолокационном пеленговании объекта визирования не представляется возможным дифференцированно определить, и узкополосную помеху, обусловленную ошибкой инерциального пеленгования объекта визирования, далее полученный разностный сигнал подвергают низкочастотной фильтрации, производят его адаптивное помехоустойчивое статистическое оценивание, подавляют при этом широкополосные помехи радиолокационного пеленгования объекта визирования, воспроизводят, т.е. выделяют, узкополосные помехи оценивания разностного сигнала, формируют сигнал, пропорциональный точный оценке разностного сигнала, для компенсации узкополосной помехи, обусловленной ошибкой инерциального пеленгования объекта визирования, для чего сигнал, пропорциональный точной оценке, суммируют с сигналом инерциального пеленгования объекта визирования, вследствие чего осуществляют компенсацию узкополосной помехи, в результате формируют отфильтрованный сигнал управления направлением на объект визирования линии визирования, который отрабатывают с минимальной ошибкой, при этом сигнал, пропорциональный минимальной ошибке, определяют как разность между сигналом, пропорциональным эквивалентной погрешности измерения угловой координаты объекта визирования, и сигналом, пропорциональным компенсирующей точкой оценке разностного сигнала, причем сигнал, пропорциональный эквивалентной погрешности измерения угловой координаты объекта визирования, пропорционален также разности углового смещения объекта визирования, обусловленного его собственным движением, и узкополосной помехи, т.е. ошибки инерциального пеленгования объекта визирования.
2. Система, осуществляющая способ по п.1, характеризующаяся тем, что функционально состоит из контура инерциального автосопровождения, в который входят инерциальный угловой дискриминатор сигналов пеленгования объекта визирования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат и четвертый сумматор, из контура радиолокационного автосопровождения, в который входят радиолокационный угловой дискриминатор сигналов пеленгования объекта визирования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат, первый сумматор, второй сумматор, первая корректирующая цепь, из контура фильтрации и компенсации, содержащего динамическое звено, охваченное жесткой отрицательной обратной связью, кроме того, система содержит первый элемент сравнения, ключ переключения режимов работы системы, информационную линию связи инерциального углового дискриминатора с внешней аппаратурой подготовки и управлением пуском подвижного носителя, информационную линию связи инерциального углового дискриминатора с интегрированным антенным устройством и структурно включает в свой состав интегрированное антенное устройство, антенно-волноводный и приемопередающий модуль, цифровое вычислительное устройство, математическое и программное обеспечение которого реализует алгоритмы угловых дискриминантов и алгоритмы системы в целом, при этом интегрированное антенное устройство содержит зеркало с облучателем, двухосный карданов подвес, ось поворота наружной рамки которого установлена на основании интегрированного антенного устройства, а ось поворота внутренней рамки которого установлена в наружной рамке перпендикулярно к ее оси поворота, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, интегрированное антенное устройство содержит датчик сигнала угла поворота наружной рамки двухосного карданова подвеса, датчик сигнала угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик сигналов угловой скорости, три однокомпонентных акселерометра, причем гироскоп установлен во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства так, что направление вектора кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования интегрированного антенного устройства, гироскоп содержит трехосный карданов подвес ротора гироскопа, датчик сигнала угла процессии внутренней рамки трехосного карданова подвеса ротора и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой установлена в корпусе гироскопа, а корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства, на соответствующих осях поворота рамок трехосного карданова подвеса ротора гироскопа установлены соответственно датчики сигнала угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора гироскопа; интегрированное антенное устройство также включает в свой состав электронный узел гиростабилизации и управление направлением зеркала антенны на объект визирования по углу наклона, электронный узел гиростабилизации и управления направлением зеркала антенны на объект визирования по азимуту, а также усилители сигналов обратной связи в соответствующих каналах гироскопического датчика сигналов угловой скорости, который установлен во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования интегрированного антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутренней рамки двухосного карданова подвеса интегрированного антенного устройства, при этом направление вектора кинетического момента ротора гироскопического датчика сигналов угловой скорости совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса интегрированного антенного устройства; все три акселератора установлены во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров, при этом ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым направлением линии визирования интегрированного антенного устройства; выходы соответствующих датчиков сигналов угла процессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соответственно соединены с выходом электронных узлов гиростабилизации и управления направлением зеркала интегрированного устройства на объект визирования по углу наклона и по азимуту, выходы которых соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса интегрированного антенного устройства, при этом выходы датчиков сигналов угла процессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора двухканального гироскопического датчика сигналов угловой скорости соединены соответственно с входом усилителей сигналов обратной связи, выходы которых соединены соответственно с датчиками сигналов момента внутренней и наружной рамок трехосного карданова подвеса двухканального гироскопического датчика сигналов угловой скорости; зеркало интегрированного антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании интегрированного антенного устройства, при этом зеркало шарнирно соединено тягами механического координатора интегрированного антенного устройства соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса интегрированного антенного устройства так, что расстояние между каждым из шарниров на задней поверхности зеркала и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и внутренней рамке двухосного карданова подвеса интегрированного антенного устройства, и центром поворота этих рамок; интегрированное антенное устройство также включает в свой состав электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, а также электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного со входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, причем сигнал, снимаемый с выхода электронного узла масштабирования сигнала с выхода электронного узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала интегрированного антенного устройства на поперечную ось системы координат, связанной с зеркалом, а выход узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с выходом датчика сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа; выходы трех однокомпонентных акселерометров соединены соответственно с первым, вторым и третьим входами цифрового вычислительного устройства, выходы двухканального гироскопического датчика сигналов угловой скорости и выход электронного узла масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединены соответственно с четвертым, пятым и шестым входами цифрового вычислительного устройства, выход датчика сигнала поворота наружной рамки и выход датчика сигнала поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту соединены с седьмым и восьмым входом цифрового вычислительного устройства, первый и второй выходы которого соединены соответственно с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, и с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости; антенно-волноводный и приемопередающий модуль, соединенный с четырехканальным облучателем, содержит суммарно-разностный преобразователь СВЧ-сигналов, выходы которого через волноводно-коммутирующее устройство соединены с приемопередатчиком, при этом суммарно-разностный преобразователь, волноводно-коммутирующее устройство и приемопередатчик соединены с десятым входом-выходом цифрового вычислительного устройства информационной линией связи, по которой осуществляется информационное взаимодействие антенно-волноводного и приемопередающего модуля и цифрового вычислительного устройства, при этом девятый информационный вход цифрового вычислительного устройства соединен информационной линией связи с внешней аппаратурой подготовки и управления пуском подвижного носителя, по которой поступает штатный информационный массив сигналов начального целеуказания и начальной выставки инерциального пеленгования объекта визирования, а третий информационный выход цифрового вычислительного устройства соединен информационной линией связи, по которой поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на объект визирования, с внешней аппаратурой управления подвижным носителем.
| ПЕРВАЧЕВ С.В | |||
| и др | |||
| Статистическая динамика радиотехнических следящих систем | |||
| - М.: Советское радио, 1973, с.347-405 | |||
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТЕЙ И УСКОРЕНИЙ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2000 |
|
RU2192022C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| WO 1989011662 A, 30.11.1989 | |||
| JP 2000284049 A, 13.10.2000 | |||
| US 5917442 A, 29.06.1999. | |||

