Настоящее изобретение относится к способу усовершенствованного управления по крену летательным аппаратом, а также к летательному аппарату, в котором применяется данный способ.
Известно, что крылья летательного аппарата снабжены управляемыми аэродинамическими поверхностями, преимущественно элеронами и дополнительно интерцепторами, обеспечивая управление указанным летательным аппаратом по крену относительно его продольной оси. Также известно, что особенно для летательных аппаратов больших размеров указанные крылья являются гибкими и деформируемыми, так что в определенных летных ситуациях (высокая скорость, высокое число Маха, высокое динамическое давление) отклонение указанных аэродинамических поверхностей управления по крену приводит к крутке указанных крыльев, заставляя последние занимать локальный угол атаки, противодействуя аэродинамическому влиянию крена, вызываемого указанными аэродинамическими поверхностями, и значительно уменьшая их эффективность. Следовательно, реакция летательного аппарата на крен не соответствует крену, обеспечиваемому указанными аэродинамическими поверхностями.
Целью настоящего изобретения является устранение указанного недостатка.
Следовательно, в соответствии с настоящим изобретением предложен способ усовершенствованного управления по крену летательным аппаратом, содержащим:
- фюзеляж,
- два крыла, симметричных относительно указанного фюзеляжа, обеспеченных управляемыми аэродинамическими поверхностями, пригодными для создания движения по крену летательного аппарата, и
- вертикальным килем, выступающим относительно задней части указанного фюзеляжа и обеспеченным рулем направления, проходящим вдоль заднего края указанного киля и выполненным с возможностью поворота относительно последнего вокруг оси вращения,
отличающийся тем, что:
- указанный руль направления разделен в поперечном направлении к указанной оси вращения, по меньшей мере, на два элемента, расположенных последовательно вдоль указанной оси вращения и управляемых независимо для вращения вокруг последней; причем
когда указанные аэродинамические поверхности крыла отклоняются для сообщения указанному летательному аппарату движения по крену в определенном направлении,
по меньшей мере, один из указанных элементов руля направления, расположенных на стороне окончания указанного киля на удалении от указанного фюзеляжа, отклоняется в указанном определенном направлении крена, и
одновременно, по меньшей мере, один из указанных элементов руля, расположенный на стороне окончания указанного киля рядом с указанным фюзеляжем, отклоняется в противоположном направлении.
Таким образом, указанные элементы руля направления создают противоположно направленные подъемные силы в поперечном направлении к указанному летательному аппарату, которые действуют на моменты крена последнего, подобно противоположно направленным подъемным силам относительно продольной оси указанного летательного аппарата. Однако поскольку элементы руля направления, которые вызывают момент крена в том же самом направлении, что и движение, обусловленное указанными аэродинамическими поверхностями крыльев, расположены дальше от указанной оси по сравнению с указанными элементами руля направления, которые вызывают момент крена в противоположном направлении, то результирующий момент крена, формируемый указанными элементами руля направления, увеличивает крен, создаваемый указанными аэродинамическими поверхностями крыльев.
Предпочтительно количество, площадь поверхности, расположение и т.д. указанных элементов руля направления выбирают таким образом, что противодействующие влияния рыскания, создаваемые указанными элементами руля, отклоняемыми в противоположных направлениях, по меньшей мере, приблизительно уравновешивают друг друга, причем результирующее рыскание практически равно нулю.
В преимущественном варианте осуществления настоящего изобретения указанный руль направления содержит только два элемента, то есть нижний элемент и верхний элемент руля направления, и во время движения по крену, создаваемому указанными аэродинамическими поверхностями крыльев, указанный верхний элемент руля направления отклоняется в направлении движения по крену, а указанный нижний элемент руля одновременно отклоняется в противоположном направлении. В этом случае площади поверхностей указанных нижнего и верхнего элементов руля направления, по меньшей мере, приблизительно равны, и указанные нижний и верхний элементы руля направления отклоняются симметрично относительно указанной оси вращения руля направления. Таким образом, не возникает рыскание.
Независимо от количества указанных элементов руля направления предпочтительно, чтобы дополнительное управление по крену, обеспечиваемое указанными элементами руля направления имело место, только когда летательный аппарат находится в летной ситуации, в которой указанные аэродинамические поверхности крыльев проявляют потерю эффективности при создании крена. Обычно в такой ситуации скорость, число Маха или динамическое давление летательного аппарата являются очень высокими. Поэтому для определения такой ситуации можно измерить, по меньшей мере, один из указанных трех параметров и сравнить измерение указанного параметра с порогом, например, определенным экспериментально, выше которого происходит указанная ситуация. Таким образом, до тех пор пока измерение параметра ниже указанного порога, эффективность аэродинамических поверхностей крыльев при выполнении крена является удовлетворительной и не нужно использовать элементы руля направления. С другой стороны, когда измерение параметра лежит выше указанного порога, эффективность аэродинамических поверхностей крыльев при создании крена больше не является удовлетворительной и осуществляется способ в соответствии с настоящим изобретением.
Кроме того, настоящее изобретение относится к летательному аппарату, в котором применяется указанный способ по настоящему изобретению. Такой летательный аппарат содержит:
фюзеляж;
два крыла, симметричных относительно указанного фюзеляжа, снабженных управляемыми аэродинамическими поверхностями, пригодными для создания движения по крену летательного аппарата;
средства управления креном указанного летательного аппарата, пригодные для управления указанными управляемыми аэродинамическими поверхностями;
вертикальный киль, выступающий относительно задней части указанного фюзеляжа и снабженный рулем направления, проходящим вдоль заднего края указанного киля, выполненным с возможностью поворота относительно последнего вокруг оси вращения; и
средства управления по рысканию указанного летательного аппарата, пригодные для управления указанным рулем направления,
и характеризуется тем, что:
указанный руль направления состоит, по меньшей мере, из двух элементов, расположенных последовательно вдоль указанной оси вращения;
указанные средства управления по рысканию выполнены с возможностью обеспечения команд первого индивидуального отклонения для каждого из указанных элементов руля направления;
указанные средства управления по рысканию выполнены с возможностью обеспечения, помимо команд отклонения для указанных аэродинамических поверхностей, команд второго индивидуального отклонения для указанных элементов руля направления, причем команды второго индивидуального отклонения являются такими, что результирующее рыскание, по меньшей мере, приблизительно равно нулю; и
средства суммирования, которые предусмотрены для суммирования для каждого из указанных элементов руля направления команды второго индивидуального отклонения с соответствующей командой первого индивидуального отклонения, когда измерение параметра, отображающего конкретную летную ситуацию, превышает предварительно установленный порог.
В предпочтительном варианте осуществления указанный руль направления состоит из нижнего элемента и верхнего элемента руля направления.
Прилагаемые чертежи поясняют способ, в котором может быть реализовано настоящее изобретение. На этих чертежах идентичные ссылочные номера будут обозначать подобные элементы.
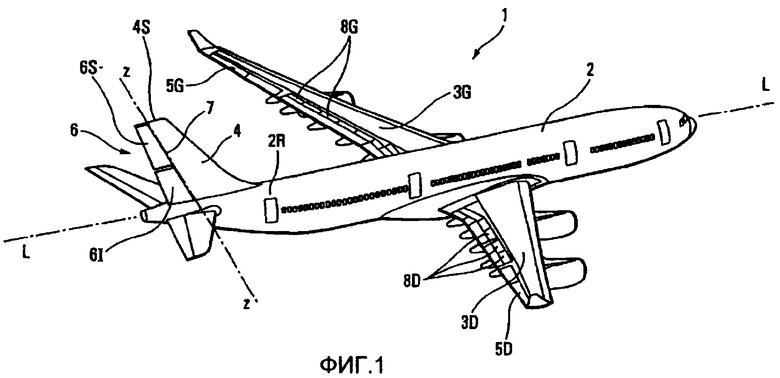
Фиг.1 изображает перспективный вид сверху и сзади широкофюзеляжного гражданского летательного аппарата, руль направления которого в соответствии с примером осуществления настоящего изобретения разделен на верхний элемент руля направления и нижний элемент руля направления.
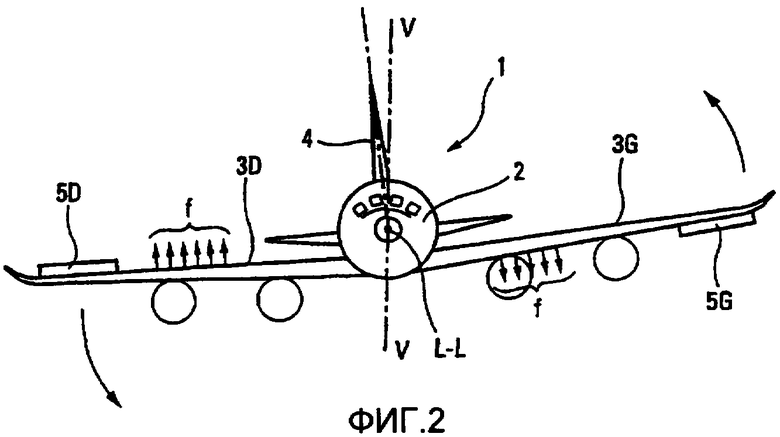
Фиг.2 изображает схематический вид передней части летательного аппарата по фиг.1, иллюстрирующий ситуацию, в которой крен регулируется только элеронами указанного летательного аппарата.
Фиг.3 изображает схематический вид передней части летательного аппарата по фиг.1, по сравнению с фиг.2 иллюстрирующий осуществление способа в соответствии с настоящим изобретением.
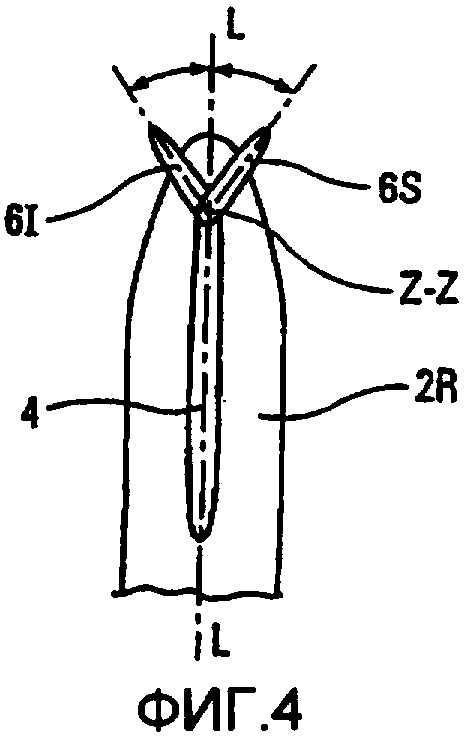
Фиг.4 изображает схематический вид задней части указанного летательного аппарата с элементами руля управления в конфигурации по фиг.3.
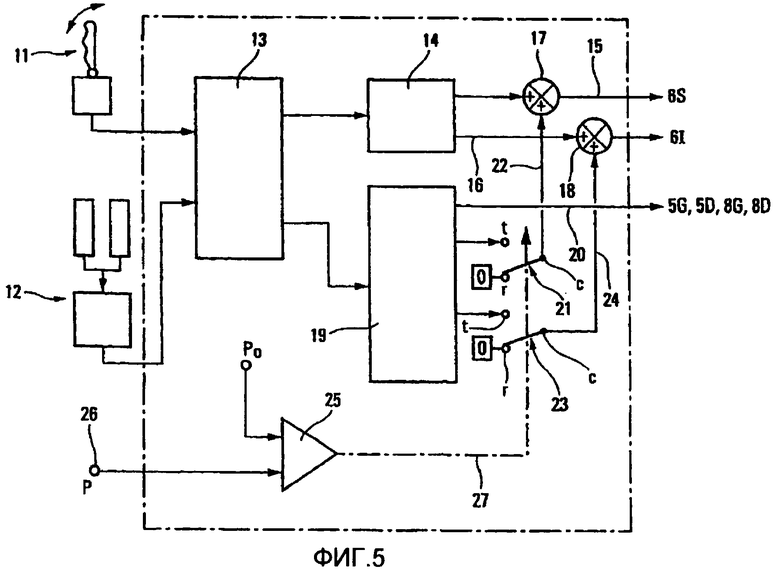
Фиг.5 изображает принципиальную схему устройства управления по крену и рысканию для осуществления способа по настоящему изобретению.
Широкофюзеляжный гражданский летательный аппарат 1, изображенный на фиг.1, содержит, как известно, фюзеляж 2, имеющий продольную ось L-L и предусмотренный с двумя крыльями 3G и 3D, симметричными относительно указанного фюзеляжа 2, а также вертикальный киль 4, выступающий вверх относительно задней части 2R фюзеляжа 2. Кроме того, известным образом, с одной стороны каждое из указанных крыльев 3G и 3D предусмотрено, по меньшей мере, с одним элероном 5G или 5D, причем указанные элероны 5G и 5D являются симметричными относительно фюзеляжа 2 и способны обеспечивать движение по крену летательного аппарата, а с другой стороны, вертикальный киль 4 снабжен рулем 6 направления, проходящим вдоль заднего края 7 указанного киля 4 и выполненным с возможностью поворота относительно последнего вокруг оси z-z вращения.
Кроме того, указанные крылья 3G и 3D соответственно предусмотрены с интерцепторами 8D и 8G, попарно симметричными относительно фюзеляжа 2, причем указанные интерцепторы 8D и 8G пригодны, известным образом, для управления по крену летательного аппарата 1 и для дополнения действия элеронов 5G и 5D.
В соответствии с первой отличительной способностью примера осуществления настоящего изобретения, изображенного на фиг.1, указанный руль 6 направления разделен в поперечном направлении к указанной оси z-z вращения на два элемента 6S и 6I руля направления с аэродинамической одинаковой рабочей поверхностью, расположенных один за другим таким образом, что один, 6I, находится рядом с задней частью 2R фюзеляжа 2 и занимает нижнее положение, в то время как другой, 6S, находится рядом с верхним концом 4S вертикального киля 4 на удалении от указанной нижней части 2R и, следовательно, занимает верхнее положение.
Верхний 6S и нижний 6I элементы руля направления могут управляться одновременно для вращения таким образом, что руль 6 направления действует, как будто он выполнен как одно целое. Элементы 6S и 6I руля направления могут также управляться независимо и в этом случае могут находиться в противоположных направлениях.
Когда, как показано на фиг.2, движение по крену регулируется обычным способом с помощью указанных элеронов 5G и 5D (действие которых при необходимости дополнено интерцепторами 8D и 8G, не показанными на фиг.2), может оказаться, что в конкретных летных ситуациях, в которых скорость является высокой, отклонение элеронов 5G, 5D и, возможно, интерцепторов 8D и 8G, приводит к крутке крыльев 3G и 3D относительно их точки крепления на фюзеляже 2. Это приводит к изменениям локального угла атаки у указанных крыльев, как обозначено стрелками f на фиг.2, что противодействует аэродинамическому влиянию элеронов 5G и 5D и, возможно, интерцепторов 8D и 8G и значительно уменьшает эффективность указанных элеронов 5G и 5D и интерцепторов 8D и 8G при выполнении крена. Следовательно, летательный аппарат 1 не имеет реакцию на крен в соответствии с запросом пилота.
Для устранения данного недостатка в соответствии с настоящим изобретением, когда элероны 5G и 5D (и, возможно, интерцепторы 8D и 8G) отклоняются для обеспечения движения по крену летательного аппарата 1 относительно продольной оси L-L, элементы 6S и 6I руля направления отклоняются симметрично относительно киля 4 летательного аппарата (см. фиг.3 и 4), причем верхний элемент 6S руля направления отклоняется в направлении заданного крена, в то время как нижний элемент 6I руля направления отклоняется в противоположном направлении.
При данных условиях верхний и нижний элементы руля направления создают соответственно поперечные подъемные силы FS и FI одинаковых абсолютных величин, но противоположных направлений. В свою очередь, эти силы FS и FI соответственно создают относительно продольной оси L-L летательного аппарата 1 момент в направлении заданного движения по крену и противоположно направленный момент по отношению к указанному движению по крену. Поскольку плечо рычага силы FS больше плеча рычага силы FI, то момент в направлении крена больше, чем момент в противоположном направлении, и результирующий момент этих двух моментов, следовательно, действует в направлении заданного движения по крену.
Таким образом, элементы 6S и 6I руля направления способствуют обеспечению движения по крену, заданного элеронами 5G и 5D и при необходимости интерцепторами 8G, 8D.
Кроме того, необходимо отметить, что поскольку элементы 6S и 6I руля направления имеют почти одинаковые площади поверхностей и отклоняются симметрично относительно киля 4, то их отклонения не вызовут никакого влияния на рыскание.
Устройство для осуществления указанного способа, изображенное схематически на фиг.5, содержит:
систему 11 управления с ручкой, выполненную помимо прочего с возможностью обеспечения команд управления креном для элеронов 5G и 5D и при необходимости интерцепторов 8D и 8G;
систему руля направления с педалью, выполненную с возможностью обеспечения команд управления для элементов 6S и 6I руля направления;
компьютер 13, принимающий указанные команды управления, посылаемые с системы 11 с ручкой и с системы 12 с педалью, подаваемые на его выходы как функция алгоритма электрического управления полетом, который содержит в памяти соответственно команду создания момента, заданного по рысканию, и команду создания момента, заданного по крену;
компьютер 14, принимающий от указанного компьютера 13 команду на создание момента, заданного по рысканию, и формирующий соответствующие команды управления для элементов 6S и 6I руля направления, которые направляются в рулевые машинки последнего соответственно по линиям 15 и 16;
сумматор 17, установленный в линии 15 управления для верхнего элемента 6S руля направления;
сумматор 18, установленный в линии 16 управления для нижнего элемента 6I руля направления;
компьютер 19, принимающий от указанного компьютера 13 команду на создание момента, заданного по крену, и формирующий соответствующие команды управления по крену:
для элеронов 5G и 5D и при необходимости для интерцепторов 8D и 8G, причем указанные соответствующие команды направляются в рулевые машинки последних соответственно по линии 20,
для верхнего элемента 6S руля направления, причем указанные соответствующие команды поступают на рабочий контакт переключателя 21, контакт r покоя которого соединен с нулевым потенциалом и общий контакт которого соединен с сумматором 17 по линии 22, и
для нижнего элемента 6I руля направления, причем указанные соответствующие команды поступают на рабочий контакт переключателя 23, контакт r покоя которого соединен с нулевым потенциалом и общий контакт которого соединен с сумматором 18 по линии 24, и
компаратор 25, принимающий с вывода 26 измерение параметра P, такого как скорость летательного аппарата, число Маха, динамическое давление и т.д., и сравнивающий это измерение с предварительно установленным порогом Po, отображающим летную ситуацию, выше которого управление по крену элеронами 5G, 5D и, возможно, интерцепторами 8D и 8G больше не является удовлетворительным, причем указанный компаратор 25 выполнен с возможностью управления указанных переключателей 21 и 23 с помощью линии 27 связи.
Таким образом, когда летательный аппарат 1 не находится в летной ситуации, для которой эффективность элеронов 5G и 5D при выполнении крена (и, возможно, интерцепторов 8D и 8G) уменьшена, элементы 6S и 6I руля направления управляются системой 12 руля направления через компьютеры 13 и 14 и линии 15 и 16.
С другой стороны, когда имеет место такая ситуация, она регистрируется посредством измерения параметра P, который становится выше порога Po, и компаратор 25 переключает переключатели 21 и 23 из их положений r покоя в их рабочие положения t, так что команды на создание крена, выдаваемые компьютером 19 соответственно для верхнего элемента 6S руля направления и нижнего элемента 6I руля направления, передаются в сумматоры 17 и 18 соответственно по линиям 22 и 24. В этом случае, команды, направленные в элементы 6S и 6I руля направления, включают, с одной стороны, команды по рысканию, задаваемые системой 12 руля направления, и, с другой стороны, команды по созданию крена, выдаваемые компьютером 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2097267C1 |
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352498C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПРИ ОТКАЗЕ ДВИГАТЕЛЯ | 2014 |
|
RU2562673C1 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2299834C2 |
| Беспилотный летательный аппарат | 2023 |
|
RU2812164C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| КОНСОЛЬ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА С УСТРОЙСТВОМ ДЛЯ УПРАВЛЕНИЯ ПО КУРСУ | 2017 |
|
RU2674900C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2310582C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2461494C2 |
Изобретение относится к области авиации. Способ заключается в разделении руля направления, по меньшей мере, на два элемента (6I, 6S) и использовании элеронов (5G, 5D) во время управления по крену, когда верхний элемент (6S) отклоняют в направлении крена, а нижний элемент (6I) - в противоположном направлении. Предложен также летательный аппарат, реализующий способ. Изобретение направлено на повышение эффективности управления. 2 н. и 8 з.п. ф-лы, 5 ил.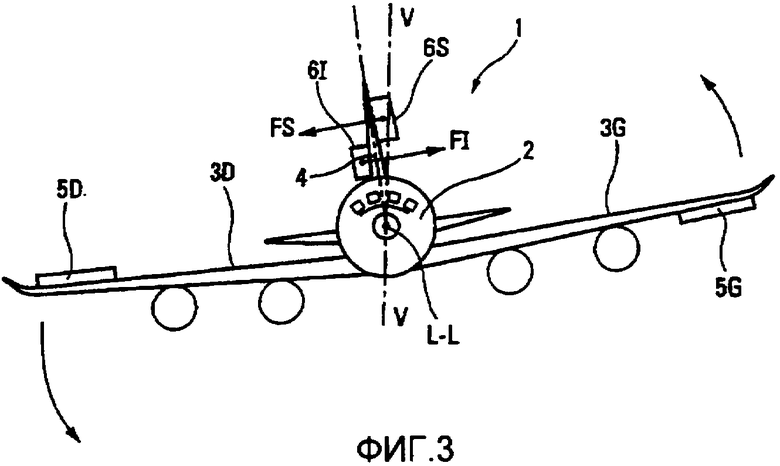
| U S4455004 А, 19.06.1984 | |||
| FR 2850084 А, 23.07.2004 | |||
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |

