Изобретение относится к авиации, а именно к наземным средствам торможения, и может быть использовано для посадки летательных аппаратов на посадочной полосе с ограниченными размерами.
Известен способ торможения летательного аппарата с помощью троса, натянутого перпендикулярно направлению посадки летательного аппарата, например, А.с. SU 1519130, МПК 6 B64F 1/02, опубл. Бюл. №3 27.01.96, по которому летательный аппарат при посадке зацепляется шасси за тормозной трос.
Однако данный способ имеет ограниченное применение из-за больших перегрузок, действующих на организм человека.
Известен способ посадки летательного аппарата с использованием газодинамического торможения воздушным потоком, формируемым источниками струй, размещенными на посадочной площадке, направленными на нижнюю часть крыльев и фюзеляжа летательного аппарата, патент RU 2005669 С1, МПК 6 B64F 1/02, опубл. в Бюл. №1 15.01.94.
Недостатком данного способа является ограниченная возможность применения - в основном для малых летательных аппаратов, так как для летательных аппаратов нормальных размеров получение и удержание требуемой расчетной скорости и плотности встречного воздушного потока с постоянно меняющимися направлением и расстоянием от источника до объекта представляет сложную проблему. Кроме того, расположение в центре посадочной полосы плоского сопла ограничивает движение летательного аппарата в случае незануления его скорости.
В качестве прототипа изобретения выбран способ с использованием устройства для посадки летательного аппарата, А.с. SU 1818279, МПК 6 B64F 1/02, опубл. Бюл. №20 30.05.90, по которому посадка летательного аппарата без шасси производится на движущуюся по направлению посадки летательного аппарата ленту конвейера, выполненную из упругих продольных элементов, при этом конвейер снабжен приводом и тормозным аппаратом.
Недостатком данного способа являются значительные продольные размеры ленты конвейера, обусловленные величиной пути торможения, кроме того, конструкция конвейера не позволяет приземляться самолетам в штатном режиме, т.е. для осуществления посадки на шасси требуется отдельная посадочная полоса.
Изобретение направлено на обеспечение безопасности и комфортности при посадке летательного аппарата, сокращение длины его пробега по полосе, широкого спектра торможения без удлинения посадочной полосы, возможности посадки летательных аппаратов в штатном режиме для данных размеров полосы, ее удлинения, т.е., продления без демонтажа конвейерного устройства.
Результат достигается тем, что в способе, включающем посадку летательного аппарата на движущуюся посадочную полосу, выполненную в виде ленточного конвейера с приводом и тормозным аппаратом, движущуюся посадочную полосу в виде автоматически управляемого конвейера устраивают в конце взлетно-посадочной полосы заподлицо с последней, при этом ширина ленты равна ширине посадочной полосы, а длина превышает жесткую базу шасси приземляющегося летательного аппарата, движение ленты конвейера осуществляют навстречу направлению движения приближающегося летательного аппарата со скоростью, близкой к скорости его движения по взлетно-посадочной полосе перед заходом на ленту конвейера, в дальнейшем скорость ленты автоматически согласуют с заданным режимом торможения приземляющегося летательного аппарата.
Результат достигается также тем, что скорость движения летательного аппарата по взлетно-посадочной полосе перед заходом на ленту конвейера фиксируют датчиками, установленными вдоль посадочной полосы, которые автоматически передают данные на командо-контроллер скорости движения ленты конвейера.
Результат достигается также тем, что фиксацию летательного аппарата на ленте конвейера осуществляют с помощью лучей, например, лазерной установки или светового реле, устанавливаемых в начале и в конце ленты конвейера.
Сущность изобретения поясняется чертежом, на котором показано: приземлившийся летательный аппарат, например самолет 1, на посадочную полосу 2; движущаяся в обратном направлении посадки лента 3 конвейера 4 с приводом и тормозным аппаратом, датчики 5 определения и передачи скорости движения самолета 1 по посадочной полосе 2 перед заходом на ленту 3 конвейера 4, лучевые датчики 6 и 7, фиксирующие («удерживающие») летательный аппарат на ленте 3 конвейера 4. Датчики 6 и 7, 4, «просвечивающие» лучами переднюю и заднюю область конвейера 4, устанавливают рядом с конвейером. Ширина ленты 3 равна ширине посадочной полосы, а длина ленточного конвейера превышает жесткую базу (расстояние между осями передних и задних шасси 8). Посадочную полосу 2, при необходимости, можно наращивать (удлинять) участками 9.
Предложенный способ осуществляется следующим образом. При посадке самолета 1 на посадочную полосу 2 с ограниченными размерами, недостающими для его торможения, в конце полосы 2 устраивают конвейер 4 с движущейся в обратном направлении лентой 3. По ходу движения по полосе 2 самолет заходит на движущуюся в обратном направлении ленту 3. Скорость движения ленты 3 задают близкой к скорости движения летательного аппарата 1 на посадочной полосе 2 перед заходом его на ленту 3. Самолет 1 заходит на ленту 3 и продолжает двигаться относительно ленты 3, которая «бежит» ему навстречу с первоначальной скоростью, равной скорости движения самолета по полосе перед заходом на ленту 3, поэтому самолет 1, находящийся на движущейся ему навстречу ленте 3 практически стоит на месте относительно конструкций конвейера 4 и посадочной полосы 2.
Скорость движения летательного аппарата 1 перед заходом на ленту определяют с помощью датчиков 5, установленных с обеих сторон (для дублирования) посадочной полосы 2, которые передают данные на командо-контроллер конвейера 4. Последний задает скорость движения ленты 3. После захода летательного аппарата 1 на ленту 3 конвейера 4, скорость движения ленты 3 с помощью электронного устройства согласуют с выбранным режимом торможения приземлившегося летательного аппарата 1: чем сильнее торможение летательного аппарата, тем медленнее движется лента 3. Изменяя степень торможения летательного аппарата 1 на ленте 3, можно в широких пределах варьировать временем и комфортностью посадки приземлившегося летательного аппарата.
Для фиксирования («удержания») летательного аппарата 1 на ленте 3 конвейера 4 рядом с ним устанавливают лучевые датчики 6 и 7, например, с лазерным излучением, или световое реле, или т.п. устройства, которые фиксируют поступательное движение летательного аппарата 1 относительно конвейера 4. При пересечении элементами (например, шасси) летательного аппарата 1 датчиков 6 скорость ленты 3 увеличивают, 7 - уменьшают, возвращая летательный аппарат 1 в центральную часть ленточного конвейера 4.
Заявленное предложение исключает аварийную ситуацию, при которой летательный аппарат выкатывается за пределы посадочной полосы со всеми вытекающими отсюда негативными последствиями, позволяет широко варьировать временем торможения летательного аппарата, находящегося на движущейся в обратном направлении ленте конвейера.
Технический результат изобретения состоит в повышении безопасности и комфортности пассажиров при посадке летательного аппарата как на укороченную посадочную полосу, так и обычную при запоздалом касании взлетно-посадочной полосы. Установленный заподлицо с посадочной полосой конвейер позволяет, при необходимости, наращивать посадочную полосу, а также приземляться соответствующим данной полосе летательным аппаратам в штатном режиме при отключенном и заторможенном конвейере.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| Способ торможения летательного аппарата при посадке | 2019 |
|
RU2722597C1 |
| Устройство для посадки летательного аппарата | 1990 |
|
SU1818279A1 |
| Наземное подвижное средство посадки (НПСП) беспилотного летательного аппарата (БЛА) и способ посадки БЛА на НПСП | 2016 |
|
RU2624522C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2483986C2 |
| ТЕЛЕЖКА-ШАССИ АЭРОДРОМНОГО ОБСЛУЖИВАНИЯ ТЯЖЕЛОГО САМОЛЕТА | 2005 |
|
RU2299158C1 |
| Устройство для торможения самолета | 2019 |
|
RU2720386C1 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| БЕСПИЛОТНАЯ АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2578830C1 |
Изобретение относится к авиации, а именно к наземным средствам торможения, и может быть использовано для посадки летательных аппаратов на посадочные полосы с ограниченными размерами, а также при запоздалом касании шасси посадочной полосы. При посадке летательного аппарата на движущуюся посадочную полосу, выполненную в виде автоматически управляемого ленточного конвейера с приводом и тормозным аппаратом, конвейер устраивают в конце взлетно-посадочной полосы заподлицо с последней. Ширина ленты равна ширине посадочной полосы, а длина превышает жесткую базу шасси приземляющегося летательного аппарата. Движение ленты конвейера осуществляют навстречу направлению движения приближающегося летательного аппарата со скоростью, близкой к скорости его движения по взлетно-посадочной полосе перед заходом на ленту конвейера. В дальнейшем скорость ленты автоматически согласуют с заданным режимом торможения приземляющегося летательного аппарата. Достигается повышение безопасности и комфортности пассажиров и экипажа при посадке летательных аппаратов на укороченную посадочную полосу, сокращение длины пробега летательного аппарата по полосе, возможность посадки летательных аппаратов в штатном режиме, возможность удлинения посадочной полосы без демонтажа конвейерного устройства. 2 з.п. ф-лы, 1 ил.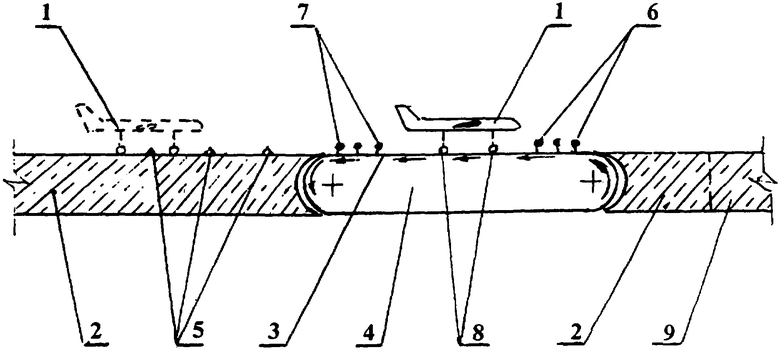
1. Способ посадки летательного аппарата, включающий посадку его на движущуюся посадочную полосу, выполненную в виде ленточного конвейера с приводом и тормозным аппаратом, отличающийся тем, что движущуюся посадочную полосу в виде автоматически управляемого конвейера устраивают в конце взлетно-посадочной полосы заподлицо с последней, при этом ширина ленты равна ширине посадочной полосы, а длина превышает жесткую базу шасси приземляющегося летательного аппарата, движение ленты конвейера осуществляют навстречу направлению движения приближающегося летательного аппарата со скоростью, близкой к скорости его движения по взлетно-посадочной полосе перед заходом на ленту конвейера, в дальнейшем скорость ленты автоматически согласуют с заданным режимом торможения приземляющегося летательного аппарата.
2. Способ по п.1, отличающийся тем, что скорость движения летательного аппарата по взлетно-посадочной полосе перед заходом на ленту конвейера фиксируют датчиками, установленными вдоль посадочной полосы, которые автоматически передают данные на командо-контроллер скорости движения ленты конвейера.
3. Способ по п.2, отличающийся тем, что фиксацию летательного аппарата на ленте конвейера осуществляют с помощью лучей, например, лазерной установки, или светового реле, устанавливаемых в начале и в конце ленты конвейера.
| Устройство для посадки летательного аппарата | 1990 |
|
SU1818279A1 |
| Рекомбинантная химерная обратная транскриптаза, обладающая повышенной процессивностью и устойчивостью к ингибиторам амплификации, и способ ее получения | 2020 |
|
RU2762291C1 |
| СЛОИСТЫЕ ЧАСТИЦЫ КЛЕТОЧНОЙ КУЛЬТУРЫ И СПОСОБЫ ИХ ПОЛУЧЕНИЯ | 2016 |
|
RU2762292C2 |

