Изобретение относится к приборам для определения угловых координат источников импульсного лазерного излучения и может быть использовано при защите различных объектов от направленного прицеливания.
Известны различные типы современных комплексов, позволяющих в любое время года и суток обнаружить средства нападения на больших дальностях и в широком диапазоне высот, определить их точные координаты и государственную принадлежность, известен целый арсенал прицелов, приборов ночного видения, используемых для обнаружения боевых единиц противника и наведения на цель, в которых применяются источники импульсного лазерного излучения, поэтому возникает необходимость в разработке средств противодействия обнаружению и прицеливанию.
Известна малогабаритная лазерная локационная аппаратура дистанционной разведки оптических и оптико-электронных средств "Антиснайпер-М" http://www.ess.ru/publications/2_2004/volkov/volkov.htm. В приборе "Антиснайпер-М" применяется лазерный осветитель, для повышения чувствительности приемного канала применяется матрица ПЗС, с цифровым блоком обработки изображения. При этом повышение чувствительности достигается за счет пространственного и временного интегрирования сигналов накопительных элементов матрицы. Недостатком известной лазерной локационной аппаратуры является малая дальность обнаружения, обусловленная активным принципом построения, и невозможность контролировать окружающее пространство в непрерывном режиме.
Известно устройство обнаружения источников лазерного излучения, выбранное в качестве прототипа (RU 2248587С2, 20.03.2005). Известное устройство содержит, в том числе, блок обнаружения, состоящий из двух датчиков, и блок управления, которые позволяют определять угловые координаты источников лазерного излучения. Однако в известном устройстве в качестве датчиков обнаружения предлагается использовать элементы пассивной локации, такие как многоэлементные ИК-датчики или ИК-головки самонаведения. Такие датчики, по соображениям селекции фона, принципиально имеют малое угловое поле, а также с помощью известного устройства невозможно контролировать окружающее пространство в непрерывном режиме.
Техническим результатом предлагаемого изобретения является увеличение дальности обнаружения источника лазерного излучения и угла обзора пространства до величины не менее полусферы, возможность контролировать окружающее пространство в непрерывном режиме и увеличение точности определения угловых координат источника лазерного излучения.
Предлагаемое устройство определения угловых координат источника импульсного лазерного излучения содержит блок управления, фотоприемное устройство на основе фотодиода, два сверхширокоугольных объектива, в фокальной плоскости которых расположены соответственно две светочувствительные матрицы, причем блок управления соединен с обеими светочувствительными матрицами и фотоприемным устройством. Время накопления сигнала каждой из светочувствительных матриц, с одной стороны, настолько мало, что обеспечивает отсутствие дневного фона, а с другой стороны, превышает время сброса накопленного сигнала второй матрицей, что обеспечивает непрерывность обзора пространства. Блок управления обеспечивает поочередное накопление сигнала светочувствительными матрицами и переключение в момент появления сигнала на выходе фотоприемного устройства светочувствительной матрицы, находящейся в режиме накопления, после его завершения, в режим считывания сигнала блоком управления. Последний имеет возможность определения угловых координат импульсного лазерного источника излучения и времени появления импульсов на выходе фотоприемного устройства.
Кроме того, фотоприемное устройство может дополнительно содержать входной оптический элемент, установленный перед фотодиодом и выполненный в виде полусферической линзы из рассеивающего материала, например из молочного стекла.
Кроме того, в устройство может быть дополнительно введен последовательный интерфейс обмена информацией с внешними устройствами, соединенный с блоком обработки сигналов.
На фиг.1 показана функциональная схема и состав предлагаемого устройства определения угловых координат источника импульсного лазерного излучения.
1 - сверхширокоугольный объектив типа «рыбий глаз» (190°);
2 - светочувствительная матрица (КМОП 640×480);
3 - фотоприемное устройство на основе PIN-фотодиода;
4 - полусферическая линза из молочного стекла (МС20);
5 - электронный блок управления;
6 - последовательный интерфейс обмена информацией с внешними устройствами;
7 - внешнее питание устройства;
На фиг.2 показаны временные диаграммы работы устройства определения угловых координат источника импульсного лазерного излучения.
8 - накопление сигнала на первой матрице;
9 - сброс информации на первой матрице;
10 - накопление сигнала на второй матрице;
11 - сброс информации на второй матрице;
12 - импульсы фотоприемного устройства;
13 - считывание сигнала со второй матрицы, поскольку первый из импульсов фотоприемного устройства на временной диаграмме пришел во время накопления сигнала именно на второй матрице;
14 - обработка считываемой информации (сигнала) в электронном блоке управления.
В устройстве использованы сверхширокоугольные объективы 1 типа «рыбий глаз» и фотоприемное устройство 3 на основе фотодиода с дополнительным рассеивающим элементом, что увеличивает угол пространственного обзора устройства до величины полусферы. Устройство обнаружения импульсного лазерного излучения и определения его координат может быть использовано, например, в системах для обнаружения летательного аппарата, боевой машины и т.п., снабженных лазерным дальномером или подсветчиком.
Предлагаемое устройство работает следующим образом.
Исходным состоянием, в котором устройство находится большую часть времени, является «ожидание» прихода лазерного импульса. В этом состоянии блок управления 5 обеспечивает поочередное накопление сигнала 8, 10 (фиг.2) светочувствительными матрицами 2, что дает возможность контролировать окружающее пространство в непрерывном режиме и в отсутствие импульса от фотодиодного приемника 3 - поочередное сбрасывание накопленного сигнала 9, 11 (фиг.2). Минимальное время экспозиции светочувствительной матрицы определяется тем, что за это время необходимо успеть сбросить накопленный сигнал с другой матрицы. Время сбрасывания накопленного сигнала не превышает 10 мкс, в то время как для считывания сигнала необходимо время приблизительно в 103 раз больше, то есть около 10 мс.
При поступлении импульса 12 (фиг.2) от фотоприемного устройства 3, означающего факт облучения устройства импульсом лазерного излучения, блок управления 5 переключает накапливающую в данный момент сигнал матрицу, после окончания режима накопления (окончания времени экспозиции), в состояние считывания сигнала (информации) блоком управления 5, а не в состояние сброса, как до этого.
С началом считывания 13 (фиг.2) блоком управления 5 изображения с одной из матриц блок управления 5 начинает цикл определения угловых координат источника зарегистрированного (пришедшего) импульса лазерного излучения 14 (фиг.2). Процедура измерения угловых координат занимает дополнительно не более 6 мс.
И при этом блок управления 5 прекращает режим накопления сигнала обеими матрицами до окончания обработки сигнала и определения угловых координат.
После окончания процедуры измерения угловых координат устройство выдает по последовательному интерфейсу обмена с внешними устройствами 6 угловые координаты и время прихода зарегистрированного фотоприемным устройством импульса, после чего снова возвращается в исходное состояние, «ожидая» прихода следующего импульса. При этом блок управления 5 снова обеспечивает режим поочередного накопления сигнала светочувствительными матрицами 2.
Кроме того, одновременно с каждым пришедшим импульсом от фотоприемного устройства 3, даже во время процедуры измерения угловых координат ранее пришедшего импульса, блок управления 5 фиксирует время прихода очередного импульса лазерного излучения 12 (фиг.2) и посылает внешнему устройству информацию о времени прихода импульса и интервале времени, прошедшем с момента регистрации предыдущего импульса. Анализ времяимпульсной модуляции излучения лазерного источника может быть использован для целей распознавания свой-чужой.
Таким образом, устройство может измерять угловые координаты приходящих импульсов лазерного излучения с частотой до 60 Гц и регистрировать время прихода импульсов лазерного излучения с частотой до нескольких МГц. Кроме того, повышается безопасность экипажа самолета или боевой машины, применяющих предлагаемое устройство, поскольку предлагаемое устройство работает в пассивном режиме и, следовательно, никак не обнаруживает себя и вместе с тем непрерывно контролирует окружающее пространство на предмет обнаружения лазерных систем наведения на самолет или боевую машину, имеющих данное устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСПЕКТРАЛЬНОЕ ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО РАЗВЕДКИ ЦЕЛЕЙ | 2015 |
|
RU2613587C2 |
| Оптико-электронная система для определения спектроэнергетических параметров и координат источника лазерного излучения инфракрасного диапазона | 2015 |
|
RU2616875C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2021 |
|
RU2774945C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ИЗМЕРЕНИЯ СКОРОСТИ, ДАЛЬНОСТИ И УГЛОВЫХ КООРДИНАТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2521203C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОСТРАНСТВЕННОЙ МОДЕЛИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2679923C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
Изобретение относится к приборам для определения угловых координат источников импульсного лазерного излучения и может быть использовано при защите различных объектов от направленного прицеливания. Техническим результатом заявленного изобретения является увеличение дальности обнаружения источника лазерного излучения и угла обзора пространства, повышение точности измерения углового положения источника лазерного излучения и возможность контролировать окружающее пространство в непрерывном режиме, что увеличивает вероятность обнаружения прицеливающегося прибора и уничтожения противника, наводящего прицел. Устройство содержит блок управления, фотоприемное устройство на основе фотодиода, два сверхширокоугольных объектива, в фокальной плоскости которых расположены соответственно две светочувствительные матрицы; время накопления сигнала каждой из светочувствительных матриц, с одной стороны, настолько мало, что обеспечивает отсутствие дневного фона, а с другой стороны, превышает время сброса накопленного сигнала второй матрицей, что обеспечивает непрерывность обзора пространства; блок управления, соединенный с первой и второй светочувствительными матрицами и с фотоприемным устройством, обеспечивает поочередное накопление сигнала светочувствительными матрицами и определяет угловые координаты импульсного лазерного источника излучения и времени появления сигналов на выходе фотоприемного устройства; светочувствительную матрицу, находящуюся в режиме накопления сигнала в момент появления сигнала на выходе фотодиода, после завершения режима накопления переходящую в режим считывания сигнала блоком управления; при этом анализ время-импульсной модуляции сигнала на выходе фотоприемного устройства может быть использован для распознавания свой-чужой. 4 з.п. ф-лы, 2 ил.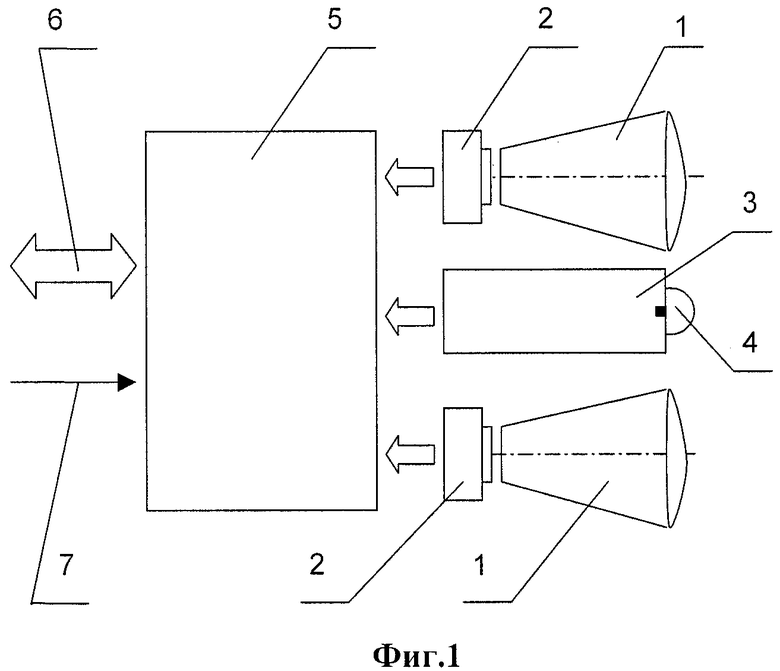
1. Устройство определения угловых координат источника импульсного лазерного излучения, содержащее блок управления, отличающееся тем, что содержит фотоприемное устройство на основе фотодиода и два сверхширокоугольных объектива, в фокальной плоскости которых расположены, соответственно, две светочувствительные матрицы, при этом блок управления соединен с первой и второй светочувствительными матрицами и с фотоприемным устройством, обеспечивает поочередное накопление сигнала светочувствительными матрицами и определение угловых координат импульсного лазерного источника излучения и времени появления сигналов на выходе фотоприемного устройства, причем анализ времяимпульсной модуляции сигнала на выходе фотоприемного устройства используется для распознавания целей свой-чужой.
2. Устройство по п.1, отличающееся тем, что время накопления сигнала каждой из светочувствительных матриц, с одной стороны, настолько мало, что обеспечивает отсутствие дневного фона, а с другой стороны, превышает время сброса накопленного сигнала второй матрицей, что обеспечивает непрерывность обзора пространства.
3. Устройство по п.1, отличающееся тем, что светочувствительная матрица, находящаяся в режиме накопления сигнала в момент появления сигнала на выходе фотодиода, после завершения режима накопления переходит в режим считывания сигнала блоком управления.
4. Устройство по п.1, отличающееся тем, что фотоприемное устройство дополнительно содержит входной оптический элемент, установленный перед фотодиодом и выполненный в виде полусферической линзы из рассеивающего материала, например из молочного стекла.
5. Устройство по п.1, отличающееся тем, что дополнительно введен последовательный интерфейс обмена информацией с внешними устройствами, соединенный с блоком управления.
| СПОСОБ ОДНОПОЗИЦИОННОГО ИЗМЕРЕНИЯ КООРДИНАТ ИСТОЧНИКА ЛАЗЕРНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2269795C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2042156C1 |
| Устройство определения направления на источник излучения | 1990 |
|
SU1764007A1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |

