Изобретение относится к области лазерной локационной техники, системам обеспечения безопасности и может быть использовано для дистанционного обнаружения и измерения координат оптических и оптико-электронных приборов: биноклей, зрительных труб, фотоаппаратов, видеокамер, стрелковых оптических прицелов, кинокамер, любых других приборов, снабженных оптическими объективами и имеющих в фокальной плоскости отражающий элемент (измерительная сетка, фотокатод электронно-оптического преобразователя, фотоприемник, матрица и др.).
Под лазерной локацией понимается режим функционирования лазерного локатора (ЛЛ), включающий в себя обзор заданной области пространства (в общем случае - по всем измеряемым координатам), обработку отраженных сигналов, принятие решения о наличии или отсутствии объектов во всей зоне в целом, либо с указанием конкретных элементов разрешения, в которых они присутствуют.
Способ обзора пространства характеризуется конфигурацией зоны обзора, последовательностью осмотра угловых позиций и длительностью зондирования.
По способам обзора пространства, включающим методы сканирования и соотношения диаграмм направленности источника и приемника оптического излучения, характеризуемых телесными углами полей зрения передающей оптической системы (ωпер) и принимающей оптической системы (ωпр), различают три варианта построения ЛЛ (Карасик В.Е, Орлов В.М. "Лазерные системы видения". - М.: Издательство МГТУ им. Н.Э. Баумана, 2001, с. 46-53; Малашин М.С., Каминский Р.П., Борисов Ю.Б. «Основы проектирования лазерных локационных систем». - М.: Высшая школа, 1983 г, с. 5-25, 118-135).
В первом варианте источник оптического излучения имеет узкое конусообразное поле зрения, а приемник оптического излучения - широкое, т.е. ωпер<<ωпр.
Изображение формируется в результате последовательного сканирования конусообразным полем зрения передающей оптической системы (ПОС) в пределах конусообразного поля зрения принимающей оптической системы (ПрОС). В качестве фотодетектора используется одноэлементный фотоприемник (фотодиод, фотоэлектронное устройство).
К достоинствам первой системы следует отнести простоту конструкции и малую вероятность ложного обнаружения объекта, т.к. даже в случае неравнояркого фона его значение на входе приемника постоянно по полю растра из-за его интегрирования по пространству. Недостатком системы является то, что отношение сигнал/шум в таких системах, как правило, невелико из-за отсутствия пространственной фильтрации.
Наиболее близким к заявляемому изобретению является способ лазерной локации второго типа, принятый за прототип (Карасик В.Е, Орлов В.М. "Лазерные системы видения". - М.: Издательство МГТУ им. Н.Э. Баумана, 2001, с. 46-53).
В прототипе ПОС имеет широкое поле зрения, освещающее все поле обзора, а ПрОС - узкое поле зрения, т.е. ωпер>>ωпр.
В этом ЛЛ сканирование отсутствует, а в качестве фотодетектора используется матричный ФПУ.
Для реализации этого метода помимо мощного импульсного источника подсвета требуется преобразователь изображения. Широкое поле подсвета позволяет за один импульс охватить большую площадь пространства и зафиксировать одновременно несколько целей, попавших в угловое поле пучка подсвета.
Недостатками такой системы являются относительно большие масса и габариты, а также невозможность сразу определить дальность до каждой из обнаруженных целей.
Цель изобретения - повышение эффективности обнаружения оптических и оптико-электронных приборов путем сокращения времени поиска при большом количестве обнаруживаемых оптико-электронных приборов (ОЭП) в заданном секторе и определения их 3-D координат.
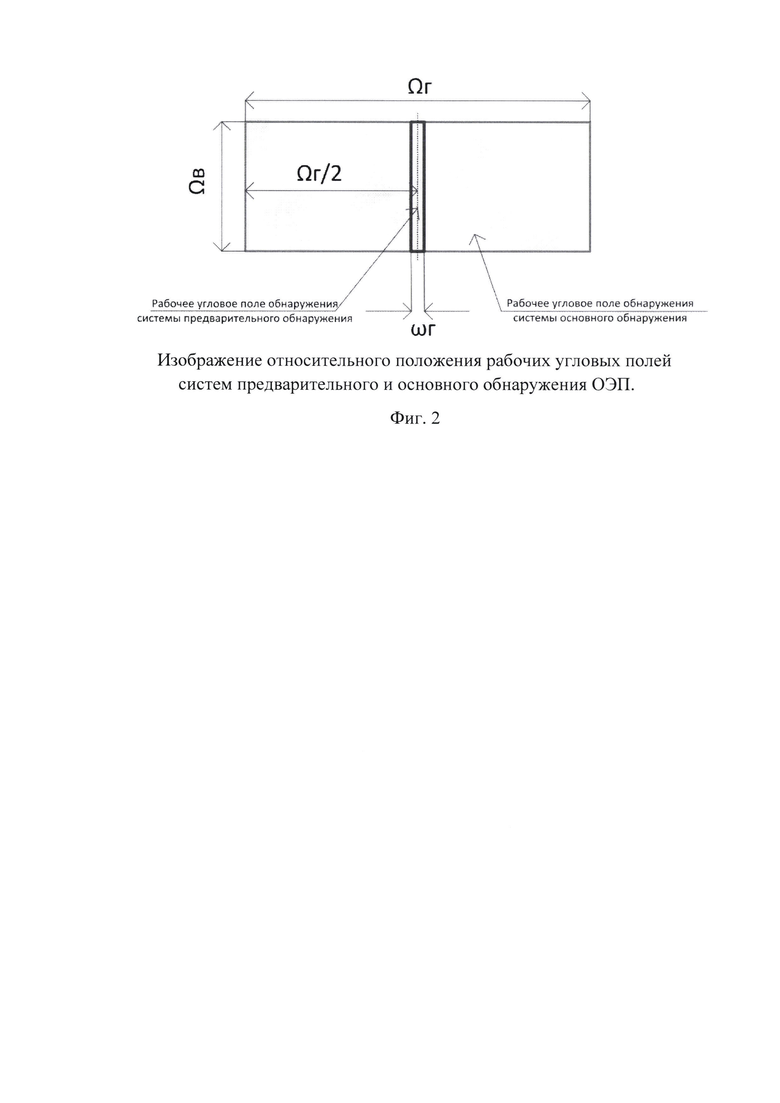
Заявленный технический результат реализуется применением двух систем обнаружения: системы предварительного обнаружения и системы основного обнаружения ОЭП, ТВ-канала, системы определения координат.
Этот результат достигается следующим образом.
Система предварительного обнаружения, состоящая из передающей системы на базе импульсного полупроводникового лазера 4 с передающей оптической системой 3 и приемной системы 5, состоящей из приемного объектива и ФПУ на базе лавинного фотодиода 6, формирует узкую вертикальную полосу размером ωг × ωв, расположенную посередине мгновенного поля обнаружения системы основного обнаружителя, сканирует поле обзора, при обнаружении вероятной цели измеряет до нее дальность.
Система основного обнаружения, состоящая из передающей системы на базе полупроводниковой лазерной решетки 8 с передающей оптической системой 7 и приемной системы 9, состоящей из приемного объектива и высокочувствительного матричного ФПУ 10 типа камеры IMX-250. Мгновенное поле зрения камеры совпадает с полем лазерного подсвета и составляет Ωг × Ωв, причем Ωв = ωв. Система обнаружения осуществляет не только поиск световозвращенных бликов от ОЭП, но и вычисление координат обнаруженной цели.
Сущность изобретения поясняется чертежами.
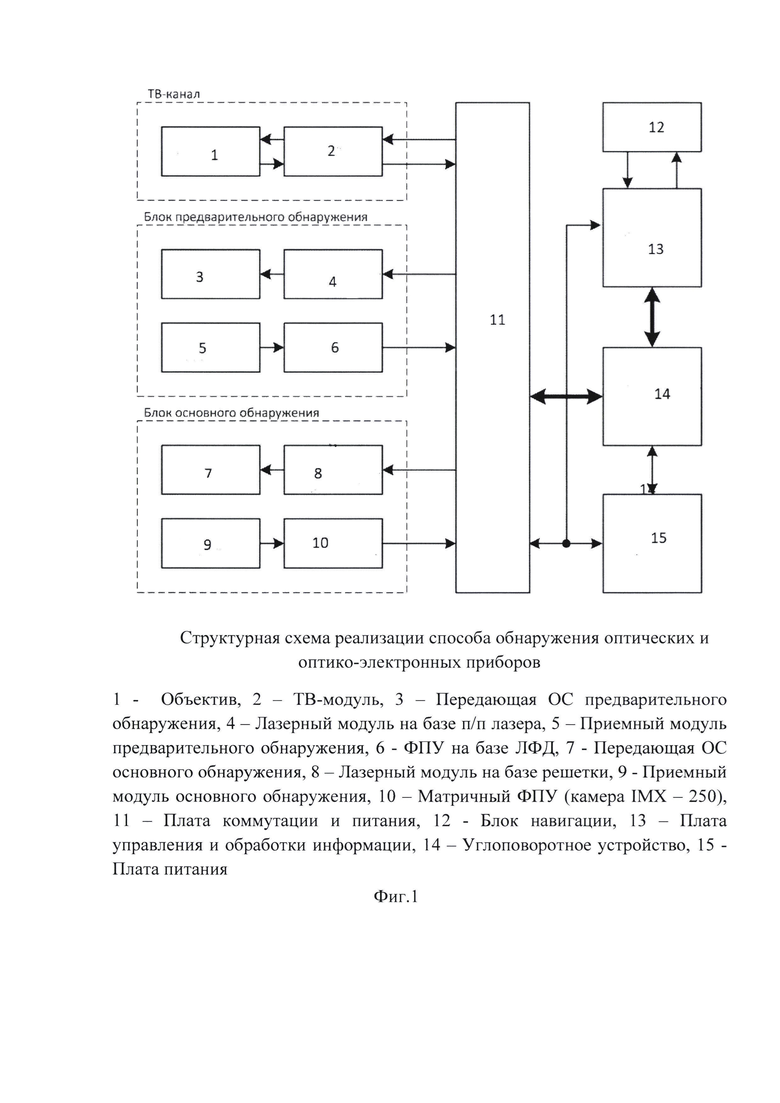
На фиг. 1 представлена возможная структурная схема реализации предлагаемого способа обнаружения, состоящая из ТВ-канала содержащего объектив 1 и ТВ-модуль 2, блоков предварительного и основного обнаружения, платы коммутации и питания 11, углоповоротного устройства 14, платы управления и обработки информации 13, блока навигации 12 и платы питания 15.
На фиг. 2 изображение относительного положения рабочих угловых полей систем предварительного и основного обнаружения ОЭП.
Рассмотрим обнаружение ОЭП с помощью предлагаемого способа.
В заданном с помощью платы управления и обработки информации секторе обзора углоповоротное устройство начинает линейное движение от одного края до другого. Блок предварительного обнаружения осуществляет непрерывное сканирование поля обзора без вынужденных остановок и дискретных механических смещений системы в ходе обзора. Остановка сканирования производится только при наличии сигнала об обнаружении вероятной цели с одновременным измерением дальности, при достижении углоповоротным устройством требуемого уровня погрешности стабилизации приступает к работе блок основного обнаружения ОЭП с дальнейшей обработкой сигналов и вычислением угловых координат с помощью блока навигации световозвращателя. Для достижения большой дальности обнаружения очень важно увеличивать именно энергию импульса подсвета, так как приемный канал на основе матричного ФПУ регистрирует энергию (экспозицию) излучения в течение времени накопления (времени экспонирования). Широкое поле подсвета у данной системы позволяет за один импульс охватить большую площадь пространства и зафиксировать одновременно десятки целей, попавших в угловое поле пучка подсвета. При этом время накопления принятых отраженных от цели импульсов практически совпадает с длительностью лазерного импульса, что обеспечивает снижение влияния фонового излучения. После регистрации излучения происходит электронная обработка сигнала (включающая селекцию на основе морфологической обработки), которая позволяет провести селекцию «ложных» целей и определить координаты «истинных». Далее движение углоповоротного устройства возобновляется до обнаружения следующей цели.
Необходимо отметить, что блок предварительного обнаружения помимо непосредственно обнаружения ОЭП вычисляет и дальность до него.
В отличие от блока основного обнаружения (с лазерной решеткой в качестве излучателя), одного лазерного импульса недостаточно для обнаружения сигнала световозвращения на фоне шумов, так как мощность одноэлементного полупроводникового лазера мала. С целью обеспечения необходимого уровня отношения сигнал/шум используется метод накопления принятых отраженных от цели импульсов. Данный метод заключается в формировании источником лазерного излучения последовательности импульсов с последующим согласованным суммировании отраженных сигналов. Амплитуда накопленного отраженного сигнала при этом увеличивается пропорционально числу суммирований N. Среднеквадратическое отклонение накопленной суммарной выборки увеличивается пропорционально  раз при предположении, что шум в каждой реализации гауссовый с нулевым средним значением. Таким образом, отношение сигнал/шум μ в одной выборке при таком методе увеличивается в
раз при предположении, что шум в каждой реализации гауссовый с нулевым средним значением. Таким образом, отношение сигнал/шум μ в одной выборке при таком методе увеличивается в  в суммарной выборке:
в суммарной выборке:
Все вышесказанное позволяет достичь заявленный технический результат, а именно повышение эффективности обнаружения оптических и оптико-электронных приборов путем сокращения времени поиска при большом количестве обнаруживаемых оптико-электронных приборов (ОЭП) в заданном секторе и определения их 3-D координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| Активно-импульсный прибор наблюдения | 2021 |
|
RU2757559C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| Способ обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2742139C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2006 |
|
RU2308746C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 1999 |
|
RU2155357C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ СВЕТОВОЗВРАЩЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2002 |
|
RU2202814C1 |
Изобретение относится к области лазерной локационной техники, системам обеспечения безопасности и может быть использовано для дистанционного обнаружения и измерения координат оптических и оптико-электронных приборов (ОЭП): биноклей, зрительных труб, фотоаппаратов, видеокамер, стрелковых оптических прицелов, кинокамер, любых других приборов, снабженных оптическими объективами и имеющих в фокальной плоскости отражающий элемент (измерительная сетка, фотокатод электронно-оптического преобразователя, фотоприемный элемент или матрица и др.). Техническим результатом является повышение эффективности обнаружения оптических и оптико-электронных приборов путем сокращения времени поиска при большом количестве обнаруживаемых ОЭП в заданном секторе обзора и определения их 3D-координат. Для этого применяются две системы обнаружения: система предварительного обнаружения и система основного обнаружения ОЭП, ТВ-канал, углоповоротное устройство, платы управления и обработки информации, коммутации и питания и блок навигации. 2 ил.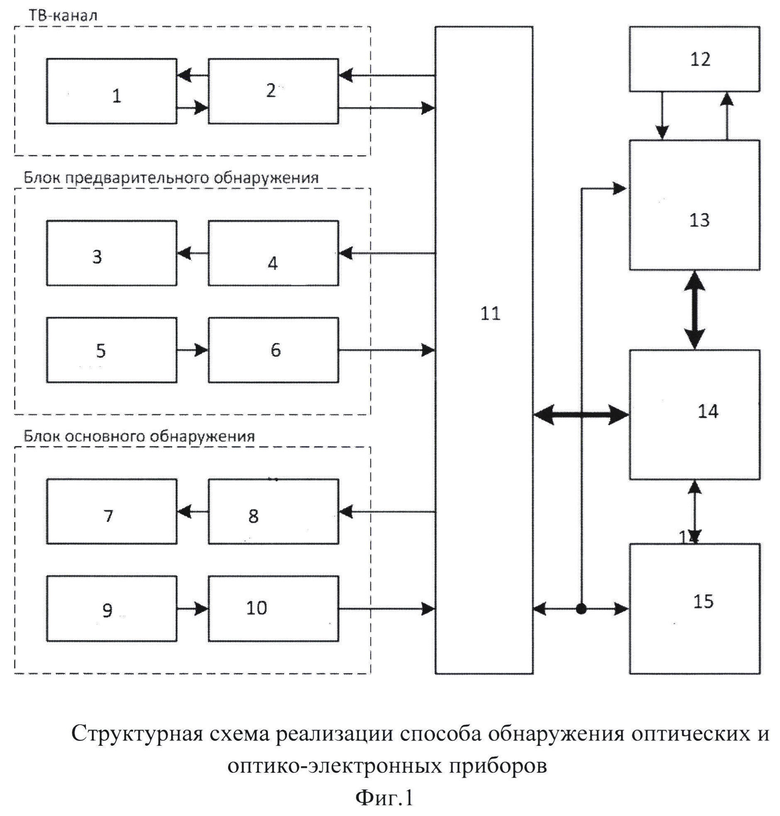
Способ обнаружения оптических и оптико-электронных приборов, основанный на облучении сектора обзора предполагаемого расположения оптических и оптико-электронных приборов лазерным излучением, приеме и обработке отраженного сигнала, отличающийся тем, что используются две системы (предварительного и основного) обнаружения оптических и оптико-электронных приборов, в заданном секторе обзора углоповоротное устройство начинает линейное движение от одного края до другого и обратно, при этом непрерывно работает система предварительного обнаружения, при появлении в приемном канале системы предварительного обнаружителя сигнала от обнаруженной цели измеряется дальность до нее, начинается процесс торможения и остановки углоповоротного устройства, при достижении углоповоротным устройством требуемого уровня погрешности стабилизации срабатывает система основного обнаружения, еще раз дообнаруживая ранее найденную световозвращенную цель и определяя ее угловые координаты с высокой точностью, одновременно сигнал с системы основного обнаружителя осуществляет процедуру селекции целей морфологическим способом, далее движение углоповоротного устройства возобновляется до обнаружения следующей цели.
| СПОСОБ СЕЛЕКЦИИ МОРСКОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2719393C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2580908C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 1999 |
|
RU2155357C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| US 2018062345 A1, 01.03.2018 | |||
| EP 0464263 A2, 08.01.1992 | |||
| 0 |
|
SU396865A1 | |
| US 2019293948 A1, 26.09.2019. | |||

