Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи датчиков угла типа вращающихся трансформаторов с цифровым вычислительным устройством.
Известен преобразователь угла поворота вала в код [1] (прототип), в котором выходные сигналы датчика угла типа синусно-косинусного вращающего трансформатора, одна из входных обмоток которого запитана от источника переменного напряжения, поступают на первый и второй синхронные детекторы, а образующиеся на их выходе постоянные напряжения, пропорциональные синусу и косинусу угла поворота датчика, поочередно опрашиваются и преобразуются в код с помощью аналого-цифрового преобразователя, ключей и схемы их управления с промежуточным осреднением кодов одной из величин, приведением тем самым отсчетов синуса и косинуса угла к одному моменту времени и последующему вычислению кода угла в вычислителе как арктангенса отношения кодов синуса и косинуса.
Недостатком известного устройства является пониженная точность преобразователя из-за ошибок датчика угла.
Как известно [2], основная составляющая погрешности датчика угла типа вращающегося трансформатора имеет характер второй гармоники от угла поворота. К такой погрешности приводит, например, неравенство коэффициентов трансформации между первичной и каждой из вторичных обмоток датчика, взаимная неортогональность магнитных осей вторичных обмоток и др.
Целью предлагаемого изобретения является существенное снижение влияния погрешности датчика на ошибку преобразователя угол-код.
Эта цель достигается за счет того, что в известное устройство, содержащее первый источник переменного напряжения, подключенный к одной из входных обмоток синусно-косинусного датчика угла и к первым входам первого и второго синхронных детекторов, вторые входы которых соединены соответственно с первым и вторым выходами датчика угла, а выходы через первый и второй ключи соединены с информационным входом аналого-цифрового преобразователя, выход которого подключен к информационным входам первого, второго и третьего регистров, выход первого регистра подключен к вычислителю непосредственно, а выходы второго и третьего регистров соединены с вычислителем через осреднитель-сумматор, формирователь управляющих сигналов, обеспечивающий управление блоками преобразователя и подачу на входы вычислителя осредненных по времени кодов напряжений, пропорциональных выходным сигналам датчика угла, образующихся от первого и второго источника переменных напряжений, при этом вычислитель определяет выходные коды, соответствующие углу поворота вала датчика, при взаимно независимой запитке датчика от первого и второго источника, и находит среднее значение кода угла, девять выходов формирователя управляющих сигналов соединены с управляющими входами первого и второго ключей, первого, второго и третьего регистров, сумматора, аналого-цифрового преобразователя, вычислителя, вторым управляющим входом первого регистра, добавляется второй источник переменного напряжения с частотой, отличной от частоты первого источника, подключенный ко второй входной ранее не задействованной обмотке датчика, третий и четвертый синхронные с частотой второго источника детекторы, третий и четвертый ключи, второй источник подключен ко второй входной обмотке датчика угла и к третьему и четвертому синхронным детекторам, вторые входы которых соединены соответственно со вторым и первым выходами датчика угла, а выходы через третий и четвертый ключи подключены к аналого-цифровому преобразователю, два дополнительных выхода формирователя управляющих сигналов подключены к управляющим входам третьего и четвертого ключа.
Благодаря указанным изменениям с учетом линейности схемы преобразования, в вычислителе устройства независимо вырабатываются два значения кода угла: одно - при запитке первой входной обмотки (обмотки возбуждения) датчика от первого источника и второе - при запитке второй входной обмотки (квадратурной обмотки) датчика от второго источника.
Выразим первый кодовый эквивалент угла датчика (α) в виде:
αK1≈α+Δαmsin(2α+αΔ0),
где α - угол поворота вала датчика,
Δαm - амплитуда суммарной составляющей второй гармоники погрешности датчика,
αΔ0 - начальное смещение суммарной второй гармоники погрешности относительно магнитной оси первой входной обмотки (возбуждения) датчика.
Для второго кодового эквивалента с учетом смещения магнитной оси второй входной обмотки (квадратурной) датчика относительно первой на 90° будем иметь
αК2≈α+Δαmsin(2(α+90°)+αΔ0)=α+Δαmsin(2α+αΔ0+180°)=α-Δαmsin(2α+αΔ0)
Вырабатывая в вычислителе полусумму эквивалентов, получим для среднего значения кода:

Таким образом, выходной код угла оказывается свободен от основной составляющей погрешности датчика.
Для эффективной работы устройства необходимо выполнение следующих условий:
- форма напряжений источников должна быть близка к синусоидальной, а их частоты должны по возможности относиться друг к другу как взаимно простые числа, чтобы максимально снизить взаимное влияние напряжений в блоках синхронной демодуляции;
- частоты первого и второго источников должны быть выбраны достаточно близкими, чтобы характер погрешности датчика в основном совпадал в обоих случаях отдельной запитки датчика от одного источника.
На чертеже изображена структурная схема устройства.
Преобразователь угла поворота вала в код содержит синусно-косинусный вращающийся датчик угла (СКДУ) 1, синхронные детекторы 2, 3, 15 и 16, ключи 4, 5, 17 и 18, аналого-цифровой преобразователь (АЦП) 6, регистры 7, 8 и 9, сумматор 10, вычислитель 11, формирователь управляющих сигналов 12, источники переменного напряжения разных частот 13 и 14.
Преобразователь работает следующим образом.
Первый с частотой f1 13 и второй с частотой f2 14 источники переменного напряжения запитывают соответственно первую (возбуждения) и вторую (квадратурную) входные обмотки СКДУ 1. На первом выходе СКДУ формируются сигналы с частотой f1, промодулированные по амплитуде в функции синуса, и с частотой f2 - в функции косинуса угла α поворота вала СКДУ. На втором выходе сигналы с частотой f1 изменяются по амплитуде в функции косинуса, а с частотой f2 - в функции синуса угла α. На выходах синхронных детекторов 2, 15, 16 и 3 вырабатываются сигналы постоянного тока, соответственно пропорциональные sin1α, cos2α, sin2α, cos1α. Здесь индексы 1 и 2 при sin и cos обозначают номер источника напряжения, от которого образовалась функция.
Дальнейшая работа преобразователя осуществляется по управляющим сигналам с формирователя управляющих сигналов 12 в следующей последовательности. По первому сигналу с формирователя управляющих сигналов 12 выходное напряжение U1sin1α1 с синхронного детектора 2 через ключ 4 поступает на вход АЦП 6, где преобразовывается в код N1. По второму сигналу формирователя управляющих сигналов 12 код N1 заносится в регистр 8. По третьему сигналу формирователя управляющих сигналов 12 выходное напряжение
U1cos1α2 с синхронного детектора 3 через ключ 5 поступает на вход АЦП 6, где преобразуется в код N2, который по четвертому сигналу формирователя управляющих сигналов 12 заносится в регистр 7. По пятому сигналу формирователя управляющих сигналов 12 выходное напряжение U1sin1α3 синхронного детектора 2 через ключ 4 поступает на вход АЦП 6, где преобразуется в код N3, который по шестому сигналу формирователя управляющих сигналов заносится в регистр 9. В сумматоре 10 формируется
 ,
,
соответствующий моменту времени формирования кода N2. По седьмому и восьмому сигналам формирователя управляющих сигналов 12, поступающих соответственно на управляющий вход сумматора 10 и второй управляющий вход регистра 7, выходные коды сумматора 10 и регистра 7 поступают на входы вычислителя 11, где формируется выходной код
 ,
,
пропорциональный углу α2 в момент формирования кода N2.
Управление работой АЦП 6 производится по сигналам, поступающим с выхода формирователя управляющих сигналов 12 на управляющий вход АЦП 6. В полной аналогии с изложенным для сигналов формирователя управляющих сигналов 12 с первого по восьмой, протекает работа преобразователя для сигналов формирователя управляющих сигналов 12 с девятого по шестнадцатый, с тем отличием, что обработке подвергаются выходные напряжения U2sin2α4, U2cos2α5, U2sin2α6 с синхронных детекторов 16 и 15, которые поступают на АЦП 6 через ключи 18 и 17.
Соответственно в этом случае управляющие сигналы формирователя управляющих сигналов 12 поступают: девятый сигнал на ключ 18 (вместо ключа 4), а одиннадцатый - на ключ 17 (вместо ключа 5). В результате в вычислителе формируется код
 ,
,
пропорциональный углу α5 в момент формирования кода N5. (Здесь N4, N5, N6 - коды, пропорциональные U2sin2α4, U2cos2α5, U2sin2α6).
Наконец, в вычислителе формируется код  , пропорциональный углу α с исключенной из него составляющей ошибки, имеющей характер второй гармоники от угла поворота СКДУ.
, пропорциональный углу α с исключенной из него составляющей ошибки, имеющей характер второй гармоники от угла поворота СКДУ.
Если изменение угла α за полный цикл работы преобразователя не превышает допустимой ошибки, работа преобразователя проходит в описанном штатном режиме. Если же, наоборот, скорость изменения угла α велика и дает сравнимые с заданной погрешностью изменения угла, за цикл работы происходит автоматическое укорачивание цикла до числа тактов формирователя управляющих сигналов с первого по восьмой, т.е. возврат работы преобразователя в режиме прототипа.
Надо отметить, что современные быстродействующие модули процессора и АЦП типа, например, CPU 686 и А111-5А фирмы ПРОСОФТ, на которых может быть реализовано предложенное устройство, позволяют завершить весь цикл преобразования за время менее 70 мкс. При скорости изменения угла менее 10°/с, это дает ошибку не более 3 угл. с. Таким образом, ограничение в эффективности применения изобретения не выглядит жестким.
Реализация предложенного устройства позволила увеличить точность преобразователя на вращающемся трансформаторе в 1,5-2 раза.
Источники информации
1. Авторское свидетельство СССР №4317561, кл. Н03М 1/58, 19.10.87.
2. А.А.Ахметжанов. Высокоточные системы передачи угла автоматических устройств. "Энергия", М. 1975. Стр.89-116.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1987 |
|
SU1525916A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2012 |
|
RU2486534C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2011 |
|
RU2486535C1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2012 |
|
RU2484495C1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU903931A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2024 |
|
RU2822126C1 |
Изобретение относится к области автоматики и вычислительной техники. Технический результат заключается в повышении точности преобразователя угол-код. Он достигается тем, что в преобразователь, содержащий первый источник переменного напряжения, подключенный к одной из входных обмоток датчика угла и к первым входам первого и второго синхронных детекторов, вторые входы которых соединены соответственно с первым и вторым выходами датчика угла, а выходы через первый и второй ключи соединены с информационным входом аналого-цифрового преобразователя, выход которого подключен к информационным входам первого, второго и третьего регистров, выход первого регистра подключен к вычислителю, а выходы второго и третьего регистров соединены с вычислителем через осреднитель-сумматор, формирователь управляющих сигналов, выходы которого соединены с управляющими входами первого и второго ключей, первого, второго и третьего регистров, сумматора, аналого-цифрового преобразователя, вычислителя и вторым управляющим входом первого регистра, добавлены второй источник переменного напряжения, третий и четвертый синхронные детекторы, третий и четвертый ключи, второй источник подключен ко второй входной обмотке датчика угла и к третьему и четвертому синхронным детекторам, вторые входы которых соединены со вторым и первым выходами датчика угла, а выходы через третий и четвертый ключи подключены к аналого-цифровому преобразователю, дополнительные выходы формирователя управляющих сигналов подключены к управляющим входам третьего и четвертого ключа. 1 ил.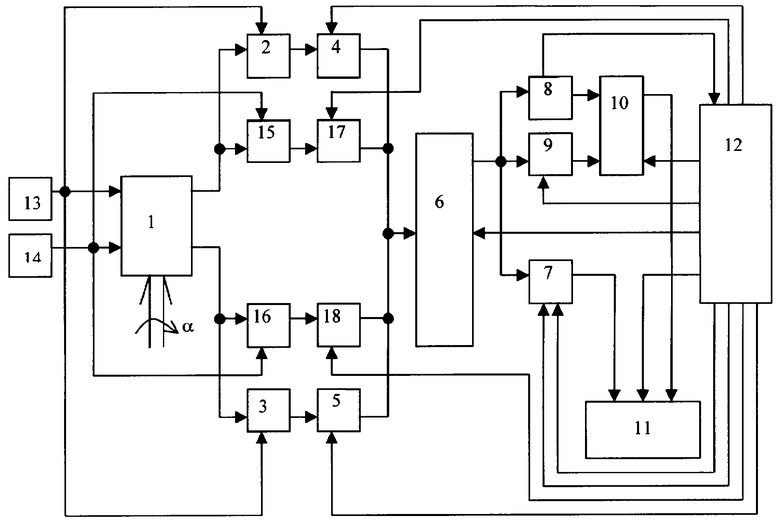
Преобразователь угла поворота вала в код, содержащий первый источник переменного напряжения, подключенный к одной из входных обмоток синусно-косинусного датчика угла и к первым входам первого и второго синхронных детекторов, вторые входы которых соединены соответственно с первым и вторым выходами датчика угла, а выходы через первый и второй ключи соединены с информационным входом аналого-цифрового преобразователя, выход которого подключен к информационным входам первого, второго и третьего регистров, выход первого регистра подключен к вычислителю непосредственно, а выходы второго и третьего регистров соединены с вычислителем через осреднитель-сумматор, формирователь управляющих сигналов, обеспечивающий управление блоками преобразователя и подачу на входы вычислителя осредненных по времени кодов напряжений, пропорциональных выходным сигналам датчика угла, образующихся от первого и второго источника переменных напряжений, при этом вычислитель определяет выходные коды, соответствующие углу поворота вала датчика, при взаимно независимой запитке датчика от первого и второго источника, и находит среднее значение кода угла, девять выходов формирователя управляющих сигналов соединены с управляющими входами первого и второго ключей, первого, второго и третьего регистров, сумматора, аналого-цифрового преобразователя, вычислителя, вторым управляющим входом первого регистра, отличающийся тем, что в него введены второй источник переменного напряжения с частотой, отличной от частоты первого источника, подключенный ко второй входной ранее не задействованной обмотке датчика, третий и четвертый синхронные с частотой второго источника детекторы, третий и четвертый ключи, второй источник подключен ко второй входной обмотке датчика угла и к третьему и четвертому синхронным детекторам, вторые входы которых соединены соответственно со вторым и первым выходами датчика угла, а выходы через третий и четвертый ключи подключены к аналого-цифровому преобразователю, два дополнительных выхода формирователя управляющих сигналов подключены к управляющим входам третьего и четвертого ключа.
| Преобразователь угла поворота вала в код | 1987 |
|
SU1525916A1 |
| Функциональный преобразователь угла поворота вала в код | 1978 |
|
SU748480A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1277401A2 |
| 0 |
|
SU156166A1 | |
| WO 9011613 A1, 04.10.1990. | |||

