Данное изобретение относится к области зондовой микроскопии и, в частности, к системе обнаружения, используемой для контроля положения зонда микроскопа относительно поверхности образца.
Принцип сканирующего зондового микроскопа (SPM) состоит в осуществлении механического сканирования по поверхности образца с помощью нанометрового наконечника зонда, чтобы сформировать изображение образца. Элементы в изображении получаются в результате изменений во взаимодействии между наконечником и образцом.
Конкретным примером SPM является атомно-силовой микроскоп (AFM), в котором контролируется силовое взаимодействие между образцом и острым наконечником зонда. Зонд в типичном AFM включает в себя очень маленький кантилевер, который прикрепляется к опоре в своем основании и имеет наконечник на противоположном (свободном) конце. Когда наконечник зонда приводится в непосредственную близость с образцом, возникает сила взаимодействия между образцом и наконечником. Если наконечник находится в движении, например колеблется, то сила взаимодействия модифицирует это движение некоторым образом. Если наконечник неподвижен, то указанная сила переместит наконечник относительно поверхности образца.
В ходе сканирования интенсивность взаимодействия между наконечником и поверхностью образца будет меняться, так как меняются характеристики поверхности под наконечником зонда. Трехкоординатный сканер высокого разрешения обычно создает относительное движение между образцом и зондом, приводя в движение либо образец и/или опору зонда. Влияние силы взаимодействия либо на положение и/или на движение наконечника зонда контролируется в ходе сканирования. При стандартной работе AFM интенсивность силы взаимодействия поддерживается постоянной. То есть наблюдается ее влияние на зонд и работает система обратной связи для регулирования расстояния между образцом и основанием зонда в ответ на любое изменение, чтобы привести наблюдаемый параметр в заранее установленное значение, заданное значение. Данные, ассоциированные с этой регулировкой (традиционно, вертикальное или "z"-перемещение), накапливаются и могут использоваться для построения изображения образца по участку его поверхности.
Как указано выше, регулировки, выполненные для расстояния основание - образец, традиционно считаются проходящими в вертикальном или _z_ направлении, при этом поверхность образца сканируется в плоскости x, y. Это правило будет соблюдаться в этом раскрытии, хотя следует учитывать, что микроскоп может располагаться так, что образец не ориентирован на горизонтальную поверхность, и поэтому регулировка по обратной связи не происходит в вертикальном направлении. То есть термин "вертикальный" нужно понимать как означающий просто "перпендикулярный" плоскости образца, или то же самое, что перпендикулярный плоскости, в которой сканируется поверхность образца. Традиционно это обозначается z-направлением, как указано осями прямоугольной системы координат, показанной на фиг.1.
Интерпретация изображения, сформированного AFM, в некоторой степени будет зависеть от характера исследуемой поверхности. Топография поверхности обычно вносит самый значимый вклад в изображение, причем высота образца тщательно прослеживается зондом, когда он осуществляет сканирование, но другие характеристики, например гидрофобность и гидрофильность поверхности, вязкоупругость и т.д., также могут вносить свой вклад. Зонд и микроскоп могут быть дополнительно приспособлены для измерения других свойств образца, например магнитных или электрических полей, посредством подходящих сил взаимодействия.
AFM могут быть спроектированы для работы в ряде режимов формирования изображений. При контактном режиме зонд пребывает практически в постоянном контакте с образцом. При динамическом режиме зонд колеблется, не образуя или образуя прерывистый контакт с образцом.
Если используется неподвижный наконечник для зондирования поверхности, то его положение в ходе сканирования контролируется с использованием влияния, которое сила взаимодействия оказывает на изгиб или отклонение кантилевера. Поскольку сила взаимодействия между наконечником и поверхностью изменяется, то наконечник либо притягивается, либо отталкивается от поверхности. Это перемещение наконечника сообщается части кантилевера в зонде, который соответственно отклоняется или изгибается вдоль своей длины. AFM в этой компоновке предписывается измерять отклонение кантилевера с помощью измерительного детектора, например системы с оптическим затвором или другого детектора отклонения, который хорошо известен в данной области техники. Отклонение в этом контексте относится к наклону верхней поверхности зонда, которая обычно используется для предоставления указания изгиба кантилевера.
В качестве альтернативы зонд может колебаться вертикально на одной из его резонансных частот или около них. Изменения во взаимодействии образца-зонда влияют на движение зонда. В частности, можно контролировать амплитуду, фазу и резонансную частоту этих колебаний, и расстояние зонд-образец может регулироваться, чтобы поддерживать постоянное среднее взаимодействие.
Независимо от режима работы, AFM могут использоваться для получения изображений на атомной шкале у широкого спектра образцов в ряде сред (воздух, жидкость или вакуум). Как правило, они применяют пьезоэлектрические приводы, детекторы отклонения с оптическим затвором и очень маленькие кантилеверы, произведенные с использованием методик производства кремния. Их высокое разрешение и универсальность привели к применению в различных областях, например в промышленном надзоре, производстве полупроводников, биологическом исследовании, материаловедении и нанолитографии.
Термины "зонд", "наконечник" и "кантилевер" часто используются взаимозаменяемо в этой области, но для целей этого описания термины требуют более строгого определения. Наконечник (или, если это лучше подходит к контексту, наконечник зонда) относится к трехмерной, часто конической или пирамидальной структуре, которая располагается на свободном конце балки кантилевера. Наконечник сходится в точку, которая является ближайшей точкой взаимодействия с опрашиваемой поверхностью. Кантилевер является самой балкой, за исключением наконечника, которая поддерживает наконечник на одном конце, а на другом удерживается микроскопом. Кантилевер и наконечник вместе называются зондом.
Фиг.1 иллюстрирует основные компоненты традиционного AFM 10. Этот AFM 10 известного уровня техники содержит перемещаемый столик 12, на котором устанавливается образец 14, который нужно исследовать с помощью зонда 16. Зонд 16 содержит балку 18 кантилевера и наконечник 20, который сходится в элементарную точку 20a и который располагается в направлении одного конца балки 18 кантилевера. Другой конец балки 18 кантилевера закрепляется в держателе 22. Система 24 z-позиционирования, содержащая пьезоэлектрические приводы, которые функционируют для перемещения столика 12 по направлению к зонду 16 и от него (z-направление), подсоединяется к столику 12. Дополнительные приводные средства (не показаны) подключаются либо к держателю 22, столику 12, либо к обоим и функционируют для обеспечения относительного движения между образцом 14 и зондом 16 в плоскости (x, y) образца. Источник 26 света выполнен с возможностью излучения луча L, который направляется на верхнюю поверхность 18b (оборотную сторону) балки 18 кантилевера в положении, в котором устанавливается наконечник 20. Свет, отраженный от обратной стороны 18b кантилевера, распространяется в измерительный детектор положения (PSD), обычно расщепленный фотодиод 28, и формируется сигнал обратной связи. Выход детектора 28 соединяется посредством контроллера 30 обратной связи с системой 24 z-позиционирования.
Сигнал обратной связи от PSD может обрабатываться для извлечения таких величин, как отклонение зонда, амплитуда, фаза или другие параметры. Для простоты этот AFM известного уровня техники будет описываться как работающий в контактном режиме с использованием обратной связи на основе отклонения зонда.
Зонд 16 обычно изготавливается (для AFM) из кремния или нитрида кремния. Как правило, кантилевер 18 составляет примерно 100-200 мкм в длину, 20-50 мкм в ширину и около 0,5 мкм в толщину, но этот размер, конечно, может меняться в соответствии с применением. Форма также может меняться: как правило, она прямоугольная или треугольная с наконечником 20 в его вершине в последнем случае. Наконечник 20 обычно составляет 5 мкм в его основании, 3-10 мкм в высоту и радиусом кривизны на конце в 10-20 нм. При использовании элементарная точка 20a на конце наконечника 20 направлена на образец.
При получении изображения образца AFM 10 известного уровня техники работает следующим образом. Используя систему 24 z-позиционирования, наконечник 20 сначала перемещается в направлении образца 14, пока кантилевер 18 не отклонится на предварительно установленный уровень. Эта предварительно установленная степень отклонения кантилевера 18, например, указанная на фиг.1 с помощью контура P1 зонда, является заданным значением для контроллера 30 обратной связи.
Отклонение кантилевера 18 контролируется с использованием светового луча L и детектора 28. Детектор 28 разделен по его длине на независимые области A и B детектора. Выходной сигнал от детектора является разностью между силой света, освещающего область A, и света, освещающего область B. Поэтому разность силы, выведенная из детектора, представляет отклонение кантилевера. Детектор 28 располагается так, что когда кантилевер 18 изгибается в положение P1 (заданное значение), то световой луч L, падающий на обратную сторону 18b кантилевера, отражается по траектории D1 и попадает практически одинаково на области A и B. То есть IA-IB~0, где IA и IB представляют силу света, освещающего области A и B соответственно. Точное значение IA-IB может регулироваться, и это значение используется для выявления положения заданного значения отклонения.
Наконечник 20 теперь осуществляет сканирование вдоль поверхности образца 14, обычно следуя растровой картине. Когда наконечник 20 встречает часть поверхности с увеличенной высотой, наконечник 20, который следует по поверхности, дополнительно подталкивается вверх. Это, в свою очередь, заставляет зонд 16 увеличивать свой изгиб, например, до положения P2. При нахождении зонда 16 в этом положении меняется угол падения между световым лучом L и поверхностью, заданной обратной стороной 18b кантилевера. Световой луч L соответственно отражается по другой траектории D2 и поэтому попадает в большей степени на область A детектора, чем на область B. То есть разность силы IA-IB света между светом, падающим на две части детектора 28, изменилась с его предыдущего значения (заданного значения). Поэтому можно увидеть, что значение разности силы света обеспечивает указание отклонения кантилевера и, что важно, указание того, насколько он отклонился от заданного значения. Контроллер 30 обратной связи настроен для регулирования вертикального положения держателя 22 зонда, чтобы удалять его от образца 14 и, таким образом, возвращать сигнал отклонения, принятый от детектора 28, в заданное значение (IA-IB~0 в приведенном примере). Зонд 16 соответственно поддерживается в ориентации, показанной как P1.
Наоборот, когда наконечник 20 встречает часть поверхности с уменьшенной высотой, отклонение на балке 18 кантилевера, которое происходит в результате изгибания от заданного значения, толкает наконечник 20 вниз. Зонд 16 поэтому уменьшит свой изгиб и примет ориентацию, например показанную с помощью P0. В этой ориентации угол падения светового луча L на обратную сторону 18b кантилевера является таким, что луч L отражается по траектории D0. Область B детектора соответственно освещается полнее, чем область A. Контроллер 30 обратной связи снова регулирует вертикальное положение держателя 22 зонда, чтобы переместить его к образцу 14 и, таким образом, сохранить сигнал отклонения в заданном значении. Зонд 16 соответственно поддерживается в ориентации, показанной как P1.
Таким образом, обратная связь системы микроскопа гарантирует, что отклонение зонда 16, которое определяется углом наклона обратной стороны 18b кантилевера над наконечником, поддерживается практически постоянным в ходе сканирования. Это, в свою очередь, гарантирует, что сила взаимодействия между наконечником 20 зонда и образцом 14, которая служит для притяжения или отталкивания наконечника от поверхности, также поддерживается практически постоянной. Когда сканирование продолжается, вертикальное положение держателя, заданное системой z-позиционирования, измеряется для предоставления указания высоты поверхности образца. Регулировки, выполненные системой 24 z-позиционирования в ходе сканирования, используются для построения изображения.
Последние достижения в зондовой микроскопии привели к более скоростным методикам сканирования с меньшим временем сбора данных. С помощью этого нового поколения микроскопа, например, которое описано в заявках на патент PCT, а именно публикациях WO 02/063368 и WO 2004/005844, становится все более очевидным, что ограничения, налагаемые самими компонентами AFM, ограничивают время сбора изображений.
Со ссылкой на возможности AFM известного уровня техники, описанного выше, когда скорость сканирования увеличивается, можно установить три отдельных режима работы AFM.
В AFM известного уровня техники, описанном выше, наконечник 20 постоянно перемещается вдоль поверхности образца, чтобы охватить установленное количество пикселей в секунду. Отклонение кантилевера контролируется, и система обратной связи выполняет постоянные регулировки в вертикальном расстоянии между зондом 16 и образцом 14, чтобы удерживать зонд 16 в заданной ориентации P1 изгиба. Скорость, с которой изменение в отклонении может обнаруживаться, а затем вертикальное расстояние может ответно регулироваться, по существу устанавливает верхний предел скорости сканирования для первого (самого медленного) режима. Чтобы собрать точную информацию, взаимодействие зонда-образца должно быть постоянным во всех положениях пикселей. То есть расстояние зонд-образец должно регулироваться системой обратной связи по временной шкале, которая короче, чем используется зондом для сбора данных изображения, соответствующих одному положению пикселя. То есть до того, как растровое сканирование переместит зонд в новое положение пикселя.
Однако, когда скорость сканирования увеличивается, AFM входит во второй режим, в котором у системы обратной связи нет достаточного времени, чтобы возвращать зонд в установленное отклонение в пределах одной области пикселя. Система обратной связи соответственно будет отставать от системы сбора данных, и информация о высоте (полученная из вертикальной регулировки) не будет отражать истинную высоту наконечника зонда (а отсюда и высоту образца) в положении пикселя. Число пикселей должно быть уменьшено либо путем увеличения размера каждого пикселя, что уменьшает разрешение изображения, либо путем замедления сканирования с последующим увеличением времени сбора данных.
Чтобы уменьшить влияние этого ограничения, данное исследование концентрируется на повышении скорости системы обратной связи: то есть эффективном расширении диапазона первого режима. Один подход использует два исполнительных механизма для обеспечения перемещения кантилевера в z-направлении. Первый исполнительный механизм приводит в движение узел зонда с последующим ограниченным откликом обратной связи. Тем не менее предоставляется второй исполнительный механизм, который составляет одно целое с зондом и поэтому может быть задействован для перемещения только зонда. Диапазон перемещения, обеспечиваемый этим дополнительным исполнительным механизмом, меньше, чем обеспечиваемый первым механизмом, но так как он используется для воздействия только на зонд, его время отклика короче. Таким образом, начальная регулировка в высоте наконечника может быть выполнена посредством быстрого исполнительного механизма с более медленной, серьезной регулировкой, следующей в установленном порядке. Однако это использование вложенных систем обратной связи с интегрированным дополнительным исполнительным механизмом столкнулось с ограниченным успехом. Частично это обусловлено сложностью в интерпретации отклика систем обратной связи и, соответственно, в определении высоты наконечника. Без этой информации нельзя сделать точный вывод о топографии поверхности (или другой характеристике образца).
Альтернативным подходом является управление AFM в режиме, допускающем некоторое изменение в отклонении кантилевера. В этом режиме измеряется отклонение кантилевера и данные, ассоциированные с этим отклонением, собираются и используются для построения изображения. Поэтому работа в этом режиме неизбежно влечет за собой усовершенствованные методики измерения для извлечения полезной информации из отклонения зонда. Как будет подробнее объясняться ниже, система обнаружения из известного уровня техники, которая показана на фиг.1, может быть приспособлена для работы в этом режиме, но такая адаптация может привести к потере измерительной информации, что для многих применений не является удовлетворительным.
Если скорость сканирования увеличивается еще больше, то происходит переход в третий режим, в котором AFM из известного уровня техники полностью непригоден для работы. Выше определенной скорости сканирования можно вызвать неустановившееся движение кантилевера 18. То есть если в ходе сканирования наконечник встречает, например, более высокую область на поверхности образца, то наконечник 20 подаст импульс, который может вызвать неустановившееся движение балки кантилевера. Если это неустановившееся движение происходит, когда зонд следует по профилю поверхности, то оно нарушит ориентацию зонда в любом заданном положении поверхности и поэтому ограничит информацию, доступную из слежения за отклонением зонда. Отклонение уже никоим образом не относится к высоте зонда. Это описывается J.P. Howard-Knight и J.K. Hobbs в "Video rate atomic force microscopy using low stiffness, low resonant frequency cantilevers", Appl. Phys. Lett 93 104101 (2008) и также будет подробнее объясняться ниже.
Обращаясь теперь снова к системе из известного уровня техники, показанной на фиг.1, понятно, что когда наконечник 20 зонда следует по поверхности образца 14, его вертикальное положение в каждой точке на линии сканирования предоставляет прямое указание на топографию образца 14. Строго поэтому измерение высоты точки 20a наконечника выше контрольного уровня, например поверхности столика 12, дало бы истинное указание высоты образца.
В первом режиме скорости сканирования система из известного уровня техники из фиг.1 просто контролирует разность между силой света, падающего на область A и падающего на область B. Никакого специального измерения отклонения не производится; AFM из известного уровня техники является обнуляющей системой, в которой необходимо только поддерживать отклонение постоянным. Информация о высоте зонда получается от приводных механизмов, которые управляют системой обратной связи для обеспечения постоянного отклонения.
Переходя теперь ко второму режиму скорости сканирования, понятно, что система из известного уровня техники могла бы использоваться для измерения разности между силой света, падающего на область A и падающего на область B. То есть AFM может быть задействован не как обнуляющая система, но и как система, которая извлекает данные (разность силы) света непосредственно в результате исследования образца. Такие данные, конечно, полезны лишь в случае, если информацию, относящуюся к высоте зонда над контрольной точкой, например поверхностью столика, можно извлечь из измеренных данных отклонения.
Измерение разности силы света между двумя частями детектора ясно предоставляет указание направления, в котором свет отражается от обратной стороны 18b кантилевера. Направление отражения, в свою очередь, зависит от угла, под которым наклонена обратная сторона 18b кантилевера. Для небольших углов изменение наклона равно углу, на который поворачивается балка 18 кантилевера, и поэтому пропорционально изменению высоты в наконечнике 20. Нужно отметить, что положения P0, P1 и P2, проиллюстрированные на фиг.1, значительно увеличены в целях наглядности, и во многих ситуациях балка 18 кантилевера не изгибается значительно, и это небольшое приближение угла является приемлемым. Также очевидно, что положение, в котором измеряется отклонение, является положением на обратной стороне 18b балки кантилевера, а не положением точки 20a наконечника. Эти две точки разнесены на величину, равную перпендикулярной высоте наконечника 20. Для небольших отклонений она может допускаться постоянной в ходе сканирования.
Независимо от этих приближений измерение высоты наконечника 20 через его отклонение имеет предубеждение в своем основании в том, что его [измерение] относительно несложно реализовать. В первом режиме сканирования не нужно измерять колебание в отклонении зонда; оно поддерживается постоянным в обнуляющей системе. Даже во втором режиме сканирования работа сканирующего зондового микроскопа на сегодняшний день находилась в условиях, для которых вышеупомянутые допущения действительны.
Несмотря на несомненно всеобщее доверие к измерению высоты зонда через его отклонение, примеры прямого измерения высоты описываются в патентах US 5144150 (Yoshizumi), EP 1892727 (Mitutoyo) и EP 2017599 (Mitutoyo). Микроскопы, описанные в этих документах, используют интерферометр для получения информации, относящейся к высоте зонда.
US 5144150 описывает использование контактного зонда для измерения конфигурации искривленной поверхности, например поверхности сферической линзы, или линзы Френеля, или рельефа на полупроводнике. Проблема в измерении таких поверхностей состоит в том, что может оказываться неприемлемое давление на поверхность образца, когда, например, балка кантилевера изгибается, когда зонд следует по особенно высокой области поверхности. Решение состоит в обеспечении того, что изгибание балки кантилевера поддерживается практически постоянным, когда сканируется поверхность образца. Это достигается путем присоединения основания кантилевера к так называемому оптическому зонду. Оптический зонд фокусируется на обратной стороне балки кантилевера выше наконечника. Если наконечник перемещается относительно основания (то есть балка изгибается), то наконечник смещается от фокальной точки оптического зонда. Оптический зонд затем физически перемещается, чтобы вернуть наконечник в фокальную точку и, таким образом, сохранить расстояние наконечник - оптический зонд. Посредством соединения между оптическим зондом и основанием кантилевера эта так называемая "система с автоматической фокусировкой" гарантирует, в свою очередь, что кантилевер возвращается в исходную конфигурацию изгиба. Другими словами, оптическая система обратной связи используется для поддержания кантилевера в практически постоянном отклонении. При этом эта компоновка аналогична системам AFM из известного уровня техники, которые работают в режиме постоянного взаимодействия, описанном выше.
В отличие от AFM постоянного взаимодействия, которые просто получают z-положение зонда из расстояния по вертикали, необходимого для перемещения основания кантилевера для сохранения положения отклонения, микроскоп по US 5144150 непосредственно измеряет скорость обратной стороны наконечника, используя интерферометрию. Из этой информации о скорости можно получить высоту зонда в конкретной точке при сканировании. Скорость зонда измеряется по интерференции лазерного луча, отраженного от обратной стороны наконечника, с опорным лучом. Луч подвергается доплеровскому сдвигу по частоте при отражении от движущегося зонда. Это использование интерферометрии обеспечивает указание высоты зонда независимо от его отклонения или отклонения связанной балки кантилевера.
Однако компоновка, описанная в US 5144150, не преодолевает никакие ограничения, налагаемые на скорость сканирования. Ее можно задействовать только в первом режиме. Система обратной связи для поддержания отклонения кантилевера не может немедленно реагировать на изменение отклонения, и соответственно скорость сканирования ограничивается таким образом, что время, необходимое на сбор пикселей изображения, превышает время отклика системы обратной связи с автофокусировкой. Следует отметить, что эта система из известного уровня техники включает в себя дополнительную систему обратной связи, которая обеспечивает отражение лазерного луча интерферометрической системы от обратной стороны зонда по траектории его падения, независимо от наклона зонда. То есть скорость сканирования ограничивается временем отклика более медленной из этих двух систем.
Две заявки Mitutoyo, EP 1892727 и EP 2017599, имеют отношение к повышению точности, с которой зондовые микроскопы могут работать, а отсюда и повышению разрешения изображения. Это достигается путем получения прямого измерения высоты зонда относительно фиксированной контрольной точки с использованием интерферометрии. В одном варианте осуществления луч, отраженный от обратной стороны зонда, интерферирует с опорным лучом и извлекается разность хода. Это решает проблему ошибок движения, вносимых сканерами: движение в z-направлении наконечника зонда возникает исключительно из формы поверхности образца. Любая ошибка сканера заставит зонд изогнуться, что не может не повлиять на прямое измерение высоты.
Система, описанная в EP 1892727, не использует никакой системы обратной связи. То есть никакой регулировки не выполняется для предотвращения чрезмерного изгибания зонда, что соответственно ограничивается сканированием очень плоских поверхностей.
EP 2017599 описывает разработку устройства, описанного в ранней заявке Mitutoyo, в котором осуществляется обратная связь. Эта система обратной связи упрощается относительно ранее описанного AFM из известного уровня техники с обратной связью в том, что используется одиночный датчик для обнаружения как контактного усилия (сигнала обратной связи), так и перемещения (высоты) зонда. Небольшое вертикальное высокочастотное колебание (дрожание) сообщается зонду, когда он осуществляет сканирование. Амплитуда этой вибрации предоставляет информацию в отношении интенсивности силы взаимодействия. Прямой сигнал высоты, измеренный интерферометром, соответственно обладает низкочастотной составляющей, которая соответствует изменению высоты образца, с привнесенной высокочастотной составляющей, которая получается в результате дрожания. Используются фильтры для разделения двух составляющих при обработке сигналов. Высота основания зонда регулируется, чтобы сохранить постоянной амплитуду высокочастотной составляющей. Эта компоновка однако не преодолевает никакого из ограничений, накладываемых на скорость сканирования. Результаты с точными данными могут быть получены, только если у системы обратной связи есть достаточно времени для отклика на любые изменения в высоте поверхности, то есть если амплитуда дрожания поддерживается постоянной между моментами сбора данных изображения. Данные не могут собираться на большей скорости, так как в первом случае измерение амплитуды требует контроля колебания в течение некоторого количества циклов (5-10 в этом случае) и, во-вторых, приводящей в направлении z системе необходимо время для регулировки положения зонда, чтобы восстановить амплитуду в ее установленное значение. Это устройство поэтому можно задействовать только в первом режиме сканирования.
Таким образом, зондовые микроскопы из известного уровня техники являются либо непригодными для работы вне первого (медленного) режима сканирования, определенного выше, либо ограничиваются в своем применении относительно плоскими образцами.
Недостатки, присущие зондовым микроскопам из известного уровня техники, дополнительно подчеркиваются путем рассмотрения дополнительных сложностей, встречающихся при попытке сканирования на очень высоких скоростях в третьем режиме сканирования, то есть если скорость достаточна для возбуждения неустановившегося движения кантилевера. Такая ситуация возникает, если кантилевер реагирует на импульс, выданный, например, при обнаружении более высокой области поверхности образца, который превышает частоту его первого ограниченного резонанса. При этих обстоятельствах не только наклон кантилевера в его наконечнике будет, вероятно, иметь другую величину по отношению к его установившемуся (заданному) наклону, но он также может быть в противоположном направлении. Неустановившееся движение будет менять угол кантилевера в положении и во времени. Проблема иллюстрируется со ссылкой на фиг.2.
Отметим, что существуют два возможных механических состояния кантилевера: наконечник может ограничиваться при контакте с поверхностью образца или он может быть свободным. Условия резонанса кантилевера в этих состояниях называются ограниченными и неограниченными резонансами соответственно.
Фиг.2a, b, с, d иллюстрируют различные ситуации, в которых наконечник 20 зонда получил импульс от поверхности образца 14. Как и раньше, зонд 16 содержит наконечник 20, соединенный с балкой 18 кантилевера. Указывается точка 20a зонда, ближайшая к образцу и обратной стороне 18b кантилевера, которая используется для измерения отклонения. Устойчивое состояние, т.е. номинальное положение обратной стороны 18b кантилевера, показано пунктирной линией 40. Под "номинальным" подразумевается, что если бы работала обратная связь, то это было бы положением, в котором нужно удерживать обратную сторону 18b. То есть это эквивалентно ориентации P1 зонда на фиг.1. Входящий световой луч L показан справа от каждой фигуры, а слева - предполагаемое направление 42 отражения, показанное в виде пунктирной линии, для зонда в номинальном положении. То есть пунктирная линия 42 соответствует D1 на фиг.1.
На фиг.2а и 2b положение поверхности образца указывается сплошной линией 44. Это положение 44 поверхности фактически является минимумом, и для ясности этого примера наконечник 20 следует по поверхности и притягивается вниз от номинального положения. Фиг.2a иллюстрирует ситуацию, в которой полученный от образца импульс, который вызывает это перемещение, является относительно медленным в масштабе времени и который продолжительнее времени установки кантилевера 18. То есть любое неустановившееся движение угаснет за время, которое требуется зонду для отклика на профиль поверхности. Когда наконечник 20 опускается для контакта с поверхностью 44, балка 18 кантилевера изгибается вниз и обратная сторона 18b кантилевера отклоняется влево от чертежа. Соответственно, световой луч L измерения отражается от обратной стороны 18b кантилевера по траектории 46. Траектория выхода луча соответственно обнаруживается как сдвигающаяся против часовой стрелки, что показано стрелкой 48. Для контраста фиг.2b иллюстрирует пример мгновенного положения зонда 16, когда импульс, полученный от образца 14, находится в масштабе времени, который короче времени установления кантилевера 18. Как и раньше, наконечник 20 притягивается вниз к уровню 44 поверхности, но неустановившееся колебание кантилевера 18 означает, что будет наблюдаться пульсация по всей его длине. Мгновенное расположение зонда поэтому может быть таким, как показано на фиг.2b. Соответственно, обратная сторона 18b кантилевера будет колебаться около точки 20a контакта зонда с образцом, так как распространяется пульсация. Мгновенное положение, в котором обратная сторона 18b кантилевера отклонена вправо, показано на фиг.2b. В этом случае световой луч L отражается по траектории 50. Траектория выхода луча соответственно наблюдается смещенной по часовой стрелке, как указано стрелкой 52.
Таким образом, видно, что несмотря на следование по одному и тому же положению поверхности мгновенное измерение отклонения зонда дало бы противоположные результаты в отличающихся ситуациях, показанных на фиг.2a и 2b.
На фиг.2c и 2d положение поверхности образца было поднято, как указано сплошной линией 54. Это положение 54 поверхности поэтому соответствует максимуму, и наконечник 20, следующий по поверхности, поднимается вверх от номинального положения. Фиг.2c иллюстрирует ситуацию, в которой полученный от образца импульс, который вызывает это перемещение, является относительно медленным в масштабе времени, который продолжительнее по времени установления кантилевера 18. То есть любое неустановившееся движение угаснет за время, которое требуется зонду для отклика на профиль поверхности. Когда наконечник 20 поднимается вместе с поверхностью 54, балка 18 кантилевера изгибается вверх, и обратная сторона 18b кантилевера отклоняется вправо от чертежа. Соответственно, опрашивающий световой луч L отражается от обратной стороны 18b кантилевера по траектории 56. Траектория выхода луча соответственно наблюдается смещенной по часовой стрелке, как указано стрелкой 58. Аналогично показанному на фиг.2b фиг.2d иллюстрирует пример мгновенного положения зонда 16, когда импульс, полученный от образца 14, находится в масштабе времени, который короче времени установления кантилевера 18. Как и на фиг.2c, наконечник 20a зонда поднимается вместе с уровнем 44 поверхности, но неустановившееся колебание кантилевера 18 означает, что будет наблюдаться пульсация, так как переходные режимы распространяются по всей длине. То есть обратная сторона 18b кантилевера будет колебаться около точки 20a контакта зонда с поверхностью. Ее мгновенное расположение может быть, например, таким, как показано. В примере фиг.2d обратная сторона 18b кантилевера отклоняется влево. В этом случае световой луч L отражается по траектории 60. Траектория выхода луча соответственно наблюдается смещенной против часовой стрелки, как указано стрелкой 62.
Снова наблюдается измерение того же положения 54 поверхности для создания значительно отличающихся результатов, если вызывается неустановившееся движение. То есть, если скорость, на которой зонд осуществляет сканирование по всей поверхности, заставляет зонд реагировать на особенности поверхности в период времени, который короче времени установления кантилевера, ограничение, которое задает начало третьего режима скорости, может быть переформулировано в виде: период сбора пикселей (среднее время, затраченное на формирование изображения той части поверхности, которая соответствует одному пикселю в изображении) становится меньше времени установления кантилевера.
Следует понимать, что положения зонда 16, показанные на фиг.2b и 2d, являются мгновенными. Переходные режимы будут распространяться по балке 18 кантилевера, и если их не подавить, то наблюдаются в виде качания обратной стороны 18b кантилевера и последующего быстрого колебания направления отраженного луча. Если переходные режимы подавляются, например, с использованием балки кантилевера с низкой добротностью Q, то исходное отклоняющее перемещение обратной стороны 18b установится значительно быстрее.
В заявке на патент PCT WO 2005/008679 описывается гибридная система, которая лучше приспособлена для измерения топографии неровных поверхностей образцов. Усовершенствованная механическая система для слежения за наконечником на поверхности образца реализуется в сочетании с электронным механизмом обратной связи. Электронный механизм обратной связи используется для проведения регулировок в вертикальном расстоянии основания зонда и опоры образца, хотя и в масштабе времени, большем скорости сбора пикселей. Вообще эти регулировки по обратной связи выполняются в течение периода, охватывающего несколько линий сканирования, но в пределах каждой линии сканирования должны измеряться колебания высоты наконечника над поверхностью образца. Предполагается, что в масштабе линии сканирования поверхность образца достаточно плоская, чтобы ограничения системы обнаружения не были слишком строгими. Измеренные колебания высоты допускают формирование изображения колебаний топографии поверхности по каждой линии сканирования, и электронные сигналы обратной связи используются для регулирования каждой линии сканирования до базового уровня. Усовершенствованная механическая система слежения необходима для поддержания наконечника в лучшем контакте с поверхностью, когда он встречает неровности. Это позволяет собирать более точную информацию о высоте в масштабе времени каждой линии сканирования. Однако это устройство из известного уровня техники, хотя и допускает функционирование во втором режиме скорости, не учитывает переходные режимы кантилевера. Хотя и обеспечивается лучшее слежение, которое соответственно сдерживает начало третьего режима, такой микроскоп остается неспособным к получению точных результатов при работе в третьем режиме.
Цель настоящего изобретения - предоставить систему обнаружения для использования вместе со сканирующим зондовым микроскопом, которая допускает получение информации, относящейся к высоте наконечника зонда, когда он осуществляет сканирование поверхности образца на скоростях, превышающих предел, установленный системой обратной связи для поддержания параметра обратной связи в заранее установленном значении. В частности, целью является предоставление системы обнаружения, способной допускать получение значимой информации, пока зонд подвергается неустановившемуся движению.
Соответственно, настоящее изобретение предоставляет систему обнаружения для использования вместе со сканирующим зондовым микроскопом, причем система содержит источник света для формирования луча, чтобы освещать зонд, содержащий кантилевер с опорным (основным) и свободным концами, причем свободный конец поддерживает острый наконечник, средство сбора для сбора света, отраженного от зонда, где луч освещает верхнюю поверхность зонда в окрестности его наконечника, и отраженный свет содержит две составляющие: первую составляющую, от которой получается указание отклонения верхней поверхности зонда, и вторую составляющую для передачи в систему обнаружения высоты, выполненную с возможностью извлечения из этой составляющей информации, относящейся к положению верхней поверхности зонда относительно контрольной точки.
Эта компоновка обладает преимуществом в том, что система обнаружения может использоваться для формирования изображения поверхности образца во всех трех режимах работы. Применительно к этому изобретению "отклонение" не нужно понимать как ограниченное значением, очевидным в известном уровне техники, описанном в этом документе. Вместо этого его нужно понимать как включающее либо угол ориентации или наклон верхней поверхности зонда (как в известном уровне техники), либо как некоторое другое угловое измерение, полученное из ориентации кантилевера. Это может включать в себя измерение, полученное из расстояния по вертикали между его опорным и основным концами (или даже другим положением на его длине). Просто заявленное "отклонение" кантилевера следует понимать как некоторый показатель формы изгиба, вызванного в кантилевере в результате взаимодействия зонда с образцом. Контроль отклонения верхней поверхности зонда позволяет использовать обратную связь для поддержания постоянной средней силы взаимодействия между наконечником зонда и образцом. Это обладает эффектом ограничения возможных напряжений в образце и/или зонде в результате чрезмерно большой применяемой силы взаимодействия. Между тем разность хода, измеренная системой обнаружения высоты, является прямым измерением высоты зонда. Независимо от отклонения кантилевера это измерение является точным указанием высоты зонда относительно положения, установленного контрольной точкой. Так как это измерение не зависит от отклонения, на него не влияет ни время отклика системы обратной связи, ни (теоретически) наличие неустановившегося движения, которое может динамически менять отклонение кантилевера, но не влияет на его высоту.
Как дополнительное следствие независимости высоты измерения от отклонения отсутствует требование наличия любых сведений о вертикальной (z) высоте основания зонда. В системах AFM из известного уровня техники измеряется высота основания, чтобы извлечь данные, с помощью которых нужно сформировать изображение. В AFM в соответствии с настоящим изобретением изображение формируется непосредственно из выходного сигнала интерферометра. Соответственно, тогда как в известном уровне техники входные сигналы в систему приведения в действие, ответственную за регулирование вертикальной высоты (z) основания, должны калиброваться по фактической достигнутой высоте, в настоящем изобретении такое требование по калибровке отсутствует.
В идеале система обнаружения высоты включает в себя интерферометр, выполненный с возможностью обнаружения разности хода между второй составляющей отраженного света и опорным лучом высоты. Такой интерферометр допускает создание точных измерений этой оптической разности хода, а отсюда и относительной высоты зонда. Предпочтительно, чтобы интерферометр являлся гомодинным интерферометром, который включает в себя средство для формирования пары квадратурных интерферограмм, которая может подвергаться методикам точного счета полос по нескольким полосам. Это повышает точность системы обнаружения высоты и увеличивает диапазон перемещения кантилевера, который может обнаруживаться. Квадратурные интерферограммы могут формироваться светоделителем с расщепляющим фазы покрытием.
Первая составляющая также может передаваться интерферометру, при этом интерферометр дополнительно выполнен с возможностью обнаружения оптической разности хода между первой составляющей отраженного света и опорным лучом отклонения, который распространяется по оптической траектории, чья длина задается положением на кантилевере, удаленным от его свободного конца и предпочтительно находящимся на его опорном конце, посредством этого предоставляя информацию в отношении наклона кантилевера. То есть в этом случае измерение отклонения получается из разности вертикальной высоты между свободным концом кантилевера и вторым положением по его длине, фактически из показателя его среднего наклона. В этом варианте осуществления интерферометр может использоваться для извлечения информации о высоте и отклонении, которая уменьшает количество необходимых компонентов.
В качестве альтернативы первая составляющая может передаваться детектору отклонения, причем детектор отклонения выполнен с возможностью предоставления указания отклонения верхней поверхности зонда. Поэтому сигнал отклонения может быть получен с использованием любого детектора отклонения, известного из предшествующего уровня техники.
В частности, детектор отклонения может быть вторым интерферометром, причем второй интерферометр выполнен с возможностью обнаружения оптической разности хода между первой составляющей отраженного света и опорным лучом отклонения, который распространяется по оптической траектории, чья длина задается положением на кантилевере, удаленным от его свободного конца и предпочтительно находящимся на его опорном конце. В качестве альтернативы детектор отклонения может быть расщепленным фотодиодом, расположенным так, что первая составляющая отраженного света падает на две части диода с относительной силой, определенной по углу ориентации верхней поверхности зонда.
Система также может включать в себя светоделитель, выполненный с возможностью разделения отраженного света на первую и вторую составляющие, упоминаемые выше.
Зонд предпочтительно содержит наконечник, установленный около свободного конца кантилевера, при этом кантилевер поддерживается в своем опорном конце, и где верхняя поверхность зонда, которая освещается лучом, находится над наконечником.
Зонд также может включать в себя исполнительный механизм, который функционирует для перемещения наконечника зонда. В одном варианте осуществления это может достигаться путем изменения угла ориентации верхней поверхности зонда в области его наконечника. Этот исполнительный механизм выполнен с возможностью приведения в движение гораздо меньшей нагрузки, чем любые приводные механизмы, которые выполнены с возможностью вертикального перемещения узла зонда и/или держателя. По этой причине он предлагает возможность быстрого отклика по обратной связи. Вложенные системы обратной связи известного уровня техники, которые также используют такой составной исполнительный механизм, имеют недостаток, заключающийся в том, что интерпретация цепей обратной связи и, следовательно, определение высоты зонда, является чем-то сложным. Данный вариант осуществления настоящего изобретения избегает этого, так как высота зонда измеряется напрямую независимо от положения, в которое приведен любой исполнительный механизм обратной связи.
Согласно второму аспекту настоящего изобретения предоставляется сканирующий зондовый микроскоп для формирования изображения образца в соответствии с взаимодействием между образцом и зондом, причем микроскоп содержит средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца, и систему обнаружения зонда, которая описана в этом документе.
Средство привода предпочтительно содержит двухкоординатный сканер, выполненный с возможностью обеспечения относительного движения между зондом и поверхностью образца в плоскости, практически параллельной поверхности образца, и приводной механизм z-направления, выполненный с возможностью обеспечения относительного движения в направлении, перпендикулярном поверхности образца. В такой компоновке указание отклонения верхней поверхности зонда, полученное из системы обнаружения зонда, может включаться в систему обратной связи, содержащую приводной механизм z-направления, где приводной механизм z-направления выполнен с возможностью возврата отклонения зонда на заданный уровень. Приводной механизм z-направления может включать в себя приводной механизм основания, выполненный с возможностью перемещения основания зонда и/или исполнительного механизма, который составляет одно целое с зондом и выполнен с возможностью перемещения наконечника зонда.
В отличие от AFM из известного уровня техники система обратной связи может работать в масштабе времени, который продолжительнее, чем используется двухкоординатным сканером для перемещения зонда между пикселями изображения без неоправданного влияния на качество изображения, записанного микроскопом из этого изобретения.
Двухкоординатный сканер предпочтительно содержит резонатор, выполненный с возможностью придания колебаний либо зонду плюс опоре, либо образцу плюс опоре на резонансной частоте или близкой к ней.
Согласно третьему аспекту настоящее изобретение предоставляет сканирующий зондовый микроскоп для формирования изображения образца в соответствии с взаимодействием между образцом и зондом, причем микроскоп содержит средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца, и систему обнаружения зонда, выполненную с возможностью предоставления указания положения зонда относительно контрольной точки в направлении, практически перпендикулярном поверхности образца, где
зонд содержит кантилевер с опорным и свободным концами, причем свободный конец поддерживает острый наконечник;
средство привода содержит двухкоординатный сканер, выполненный с возможностью обеспечения относительного движения между зондом и поверхностью образца в плоскости, практически параллельной поверхности образца, причем сканер включает в себя по меньшей мере один резонатор, выполненный с возможностью придания колебаний либо зонду, либо образцу плюс опоре на резонансной частоте или близкой к ней, и приводной механизм z-направления, выполненный с возможностью обеспечения относительного движения в направлении, практически перпендикулярном поверхности образца; и
система обнаружения зонда содержит источник света для формирования луча, чтобы освещать зонд, средство сбора для сбора света, отраженного от зонда, где луч освещает верхнюю поверхность зонда в окрестности его наконечника, и систему обнаружения высоты, выполненную с возможностью извлечения из света, отраженного от зонда, информации, относящейся к положению верхней поверхности зонда относительно эталонной точки.
Система обнаружения высоты в идеале включает в себя интерферометр, выполненный с возможностью обнаружения разности хода между светом, отраженным от зонда, и опорным лучом высоты.
Согласно четвертому аспекту настоящее изобретение предоставляет способ обнаружения света, отраженного от верхней поверхности сканирующего зонда, причем способ включает в себя этап направления светового луча на верхнюю поверхность в точке непосредственно над наконечником зонда, сбора света, отраженного от верхней поверхности и направления его в детектор высоты, выполненный с возможностью формирования изображения, указывающего высоту наконечника зонда над эталонным уровнем.
В идеале вышеупомянутому способу предшествует этап нахождения точки на верхней поверхности, которая находится непосредственно над наконечником зонда. Этот этап предпочтительно включает в себя этапы:
(а) направления света на верхнюю поверхность;
(b) придания колебаний зонду около его наконечника с тем, чтобы изменить угол верхней поверхности;
(с) контроля выходного сигнала детектора высоты;
(d) изменения положения точки на верхней поверхности, в которую падает свет; и
(е) повторения этапов (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате отклонения зонда.
Это предоставляет удобную методику для минимизации влияний переходных процессов на качество изображения.
Зонд предпочтительно содержит кантилевер, удерживаемый в его основании и поддерживающий наконечник на свободном конце или рядом с ним, причем верхняя поверхность зонда, которая освещается лучом, находится на свободном конце кантилевера или рядом с ним.
В качестве альтернативы этап нахождения местоположения точки на верхней поверхности может включать в себя этапы:
(а) направления света на верхнюю поверхность кантилевера;
(b) перемещения основания кантилевера вертикально, в то же время поддерживая наконечник в неподвижном положении, чтобы изменить угол ориентации кантилевера;
(с) контроля выходного сигнала детектора высоты;
(d) изменения положения точки на верхней поверхности, в которую падает свет; и
(е) повторения этапов (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате перемещения основания зонда.
В вариантах осуществления, для которых сигнал обратной связи получается из указания ориентации зонда, сигнал обратной связи является таким, чтобы вызвать регулировку высоты основания, так что зонд возвращается в предустановленную ориентацию, тогда этап перемещения основания кантилевера вертикально может осуществляться путем изменения предустановленной ориентации.
В качестве альтернативы этап нахождения местоположения точки на верхней поверхности может включать в себя этапы:
(а) направления света на верхнюю поверхность;
(b) перемещения наконечника зонда на известное расстояние и, предпочтительно, сканирования зондом по образцу с известным колебанием высоты;
(с) контроля выходного сигнала детектора высоты;
(d) изменения местоположения точки на верхней поверхности, в которую падает свет; и
(e) повторения этапов (c) и (d) до тех пор, пока выходной сигнал детектора высоты не соответствует предполагаемому для известного перемещения.
В качестве альтернативы он может включать в себя этапы:
(а) направления света на верхнюю поверхность;
(b) сканирования зондом со скоростью, достаточной для возбуждения неустановившегося движения;
(с) контроля выходного сигнала детектора высоты;
(d) изменения местоположения точки на верхней поверхности, в которую падает свет; и
(е) повторения этапов (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате неустановившегося движения.
Согласно пятому аспекту настоящее изобретение предоставляет способ сбора данных с использованием сканирующего зондового микроскопа, причем способ содержит этапы:
(а) перемещения зонда, содержащего кантилевер с опорным и свободным концами, причем свободный конец поддерживает острый наконечник, в непосредственную близость с поверхностью образца;
(b) направления светового луча на верхнюю поверхность зонда в точке непосредственно над наконечником; и
(c) сканирования зондом по поверхности образца, одновременно собирая и анализируя свет, отраженный от верхней поверхности зонда, причем приводной механизм z-направления функционирует для приведения основания зонда вертикально в ответ на сигнал обратной связи, полученный при анализе первой составляющей собранного света, из которого получается указание отклонения верхней поверхности зонда, и где вторая составляющая собранного света передается интерферометру, выполненному с возможностью обнаружения разности хода между этой составляющей и опорным лучом высоты и выполненному с возможностью формирования изображения, указывающего высоту наконечника зонда над эталонным уровнем; где отклик на сигнал обратной связи происходит в большем масштабе времени, чем масштаб времени, в котором собираются несколько пикселей изображения.
Варианты осуществления изобретения сейчас будут описываться только в качестве примера и со ссылкой на прилагаемые чертежи.
Фиг.1 - схематическая иллюстрация компонентов атомно-силового микроскопа известного уровня техники, показывающая типичную систему обнаружения отклонения.
Фиг.2 - последовательность примеров возможных ориентаций наконечника и кантилевера при формировании изображения на частотах сканирования ниже ((а) и (c)) и выше ((b) и (d)) пороговой величины, при которых наблюдается неустановившееся движение кантилевера.
Фиг.3 - схематическая иллюстрация компонентов атомно-силового микроскопа с системой обнаружения зонда в соответствии с настоящим изобретением.
Фиг.4 - схематическая иллюстрация системы обнаружения зонда в соответствии с настоящим изобретением, встроенной в высокоскоростной сканирующий зондовый микроскоп.
Фиг.5 - схематическая иллюстрация интерферометрической системы обнаружения высоты для использования с настоящим изобретением.
Фиг.6 - схематическая иллюстрация влияния изменения точки на обратной стороне кантилевера, в которой измеряется высота.
Фиг.7 - схематическая иллюстрация устройства, используемого для наладки системы обнаружения из настоящего изобретения при подготовке к осуществлению сканирования поверхности образца.
Со ссылкой на фиг.3 схематически показана реализация AFM, указанного в целом позицией 70, который использует первый вариант осуществления детектора, созданного в соответствии с аспектом настоящего изобретения. Элементам, общим для AFM из известного уровня техники, описанного ранее со ссылкой на фиг.1, присвоены такие же номера позиций. Соответственно, показанное устройство AFM содержит перемещаемый столик 12, приспособленный для вмещения образца 14, чья поверхность должна быть исследована зондом 16. Зонд 16 содержит балку 18 кантилевера и наконечник 20, который сходится в точку 20a и который располагается в направлении одного конца балки 18 кантилевера. Другой конец балки 18 кантилевера поддерживается держателем 22.
Один или несколько приводных двигателей (72, не показаны) используются для приведения образца 14 (вместе со столиком 12) и/или зонда 16 таким образом, что они могут сканироваться относительно друг друга в трех измерениях: в направлениях x, y и z. По традиции в данной области техники ось z в прямоугольной системе координат будет считаться осью, перпендикулярной плоскости, занятой образцом 14. То есть интенсивность силы взаимодействия между зондом 16 и образцом 14 зависит как от двухкоординатного положения наконечника 20 на образце 14 (пикселе, который он изображает), так и от высоты над ним.
Среди различных приводных двигателей система 72 z-позиционирования является наиболее важной для целей этого изобретения. Система 72 z-позиционирования содержит пьезоэлектрические возбудители, которые функционируют для перемещения наконечника 20 по направлению к образцу 14 и от него (z-направление). В этом варианте осуществления система z-позиционирования соединяется с держателем 22 зонда. В качестве альтернативы она может соединяться с предметным столиком 12 (как показано на фиг.1), и она может содержать не пьезоэлектрические приводные механизмы, например звуковую катушку или тепловой биморфный привод. Дополнительные двигатели подключаются либо к держателю 22, столику 12 или к обоим и функционируют для обеспечения относительного движения между образцом 14 и наконечником 20 в плоскости (x, y) образца, так что наконечник 20 осуществляет сканирование растровым способом или иным образом образца 14.
В одном варианте осуществления система z-позиционирования может включать в себя как приводной механизм столика (или держателя), который описан выше, так и дополнительный исполнительный механизм, который составляет одно целое с самим зондом. Этот составной исполнительный механизм может использоваться для управления отклонением зонда с более быстрым откликом по обратной связи, чем возможен с помощью приводного механизма узла.
Зонд 16 является малоинерционным зондом AFM, и во время сканирования развивается сила взаимодействия между наконечником 20 и поверхностью образца. Механизм 74 обнаружения зонда, который подробнее будет объясняться ниже, выполнен с возможностью получения указания как о вертикальном (z) перемещении точки 18b на обратной стороне кантилевера над наконечником 20, так и его отклонении (наклоне). Данные, относящиеся к вертикальному перемещению, анализируются и выводятся на дисплей (не показан). Информация, относящаяся к наклону/отклонению обратной стороны 18b кантилевера, вводится в контроллер 30 обратной связи, который в свою очередь подключен к приводному механизму системы 72 z-позиционирования.
Отметим, что для удобства характеристика "вертикальный" применяется к движению системы микроскопа в z-направлении. Как понятно из предыдущих комментариев, движение не ограничивается ситуациями, в которых ось z микроскопа ориентирована вертикально. Микроскоп может размещаться в любой удобной ориентации, которая соответствует цели.
Зонд 16 обычно изготавливается (для AFM) из кремния или нитрида кремния и получает форму и размер, которые описаны ранее в отношении известного уровня техники.
При получении изображения образца AFM 70 работает следующим образом. Используя систему 72 z-позиционирования и дополнительные приводные механизмы, образец 14 сначала приводится в контакт с наконечником 20 в начальном положении растрового (x, y) сканирования. Традиционно в терминологии AFM говорится, что наконечник 20 приводится в контакт с образцом 14, когда атомная сила взаимодействия находится в отталкивающем режиме. Как только зонд 16 устанавливает контакт с поверхностью образца, наконечник 20 соответственно отталкивается вверх. Основание кантилевера 18 на стороне, удаленной от наконечника, поддерживается в нужном положении с помощью держателя 22, и поэтому кантилевер 18 изгибается или отклоняется вверх. По традиции и как описано в отношении известного уровня техники, держатель 22 опускается, перемещая зонд 16 в направлении образца 14, пока изгиб кантилевера не достигнет заранее установленного уровня. Этот заранее установленный уровень является заданным значением для контроллера 30 обратной связи.
Когда сканирование продолжается, наконечник 20 перемещается вверх и вниз, так как высота поверхности образца меняется. Когда он перемещается, изменяется степень наклона, что изменяет сигнал, подаваемый на контроллер 30 обратной связи, и система 72 z-позиционирования регулируется. Когда основание зонда регулируется в ответ на обратную связь, тогда применяют следующие заключения. Так как наконечник перемещается по образцу со скоростью v, он следует по поверхности образца и поэтому встречает колебания высоты поверхности на частоте ftrack, которая пропорциональна v. Неустановившееся движение будет вызвано в кантилевере с временем τ спада или установления. Время отклика системы обратной связи равно времени, которое требуется системе обратной связи для обнаружения изменения в параметре обратной связи и соответственного регулирования высоты основания зонда.
Можно выделить три режима скорости сканирования:
- Если время отклика системы обратной связи меньше интервала времени между моментами сбора данных, то у системы обратной связи есть достаточно времени для регулирования высоты зонда, пока зонд собирает данные, относящиеся к высоте поверхности в одной точке изображения. То есть для всех точек изображения зонд может считаться имеющим постоянное отклонение, а отсюда сила взаимодействия между зондом и образцом также может считаться постоянной. Это первый режим скорости, в котором системы известного уровня техники, использующие обратную связь, допускают извлечение точной информации о поверхности. Однако устройство согласно этому изобретению отличается от предшествующего уровня техники тем, что информация, относящаяся к высоте зонда, получается непосредственно системой 74 обнаружения.
- Если время отклика системы обратной связи больше интервала времени между моментами сбора данных, то обратная связь служит только для поддержания постоянного среднего отклонения. В этом втором режиме скорость наконечника такова, что колебания поверхности отслеживаются на большей частоте, чем может обеспечиваться временем отклика у системы обратной связи, и поэтому такие колебания должны измеряться непосредственно системой обнаружения высоты зонда. Сигнал обратной связи используется для поддержания постоянного среднего отклонения, что смягчает экстремумы интенсивности взаимодействия, испытываемые зондом, которые могут вызвать повреждение зонда, образца или обоих.
- В третьем режиме сканирования время установления кантилевера больше интервала времени между моментами сбора данных, и любое неустановившееся движение, вызванное в кантилевере, не затухнет до того, как зонд переместится на последующие области изображения у образца. Однако система обнаружения высоты из настоящего изобретения допускает извлечение измерения высоты зонда при наличии такого движения. Это, в свою очередь, дает указание высоты образца при условии, что наконечник поддерживает контакт с образцом.
Этим режимам даны широкие определения, и начало каждого зависит, конечно, от конкретных рабочих условий и параметров микроскопа и исследуемого образца.
Работа системы 74 обнаружения в соответствии с настоящим изобретением сейчас будет описываться подробнее. Источник света (не показан) испускает лазерный луч 76, который фокусируется объективом 78 на обратную сторону 18b кантилевера. Отраженный свет 80a, b, c собирается объективом 78 и направляется к неполяризирующему светоделителю 82. Как видно из фиг.3, наклон кантилевера 18b влияет на угол, под которым отражается свет. Если зонд поддерживается в его установленном положении обратной связи, то отраженный луч следует по траектории 80b. Однако если обратная сторона 18b кантилевера отклоняется влево (относительно чертежа), то отраженный луч 80а будет отклоняться против часовой стрелки, а наклон вправо отклонит отраженный луч 80c по часовой стрелке. Так как обратная сторона 18b кантилевера располагается в фокальной точке объектива 78 или рядом с ней, изменение угла в отраженном луче преобразуется в боковое смещение после объектива. То есть наклон влево кантилевера создает левое боковое смещение отраженного луча, а наклон вправо формирует правое боковое смещение относительно установленного положения обратной связи.
Светоделитель 82 устроен так, что он отражает под 90° практически половину 84a, b, c света, падающего на него, и пропускает другую половину 86a, b, c. Прошедшая составляющая света 86a, b, c вводится в интерферометр 88. Работа этого интерферометра будет подробнее описываться со ссылкой на фиг.5. Таким образом, отраженный луч 86a, b, c все же интерферирует с опорным лучом, отраженным от верхней поверхности столика 12. В качестве альтернативы может использоваться другая неподвижная точка с известным отношением к поверхности столика. Это предоставляет меру разности хода между двумя лучами, а отсюда и указание высоты обратной стороны 18b кантилевера над поверхностью столика. Колебания этой измеренной высоты извлекаются для формирования изображения.
Составляющие 84a, b, c, отраженные от светоделителя 82, собираются объективом 90 на детекторе 28 отклонения. Как и в известном уровне техники, детектор 28 разделен по его длине на независимые области A и B детектора. Выходные сигналы, сформированные из этих областей, вводятся в дифференциальный усилитель 92, который выводит сигнал, равный разности между двумя каналами. Детектор 28 лежит на одной прямой с собирающей лучи оптикой, так что когда обратная сторона 18b кантилевера отклоняется в установленное положение отклонения, то выходной сигнал из дифференциального усилителя также будет принимать заданное значение. То есть отраженный свет 80b, 84b распределяется между каналами A и B таким образом, что разность в выходе канала является установленным значением. Наклон влево обратной стороны 18b кантилевера означает, что сигнал от детектора 28 увеличивается в канале B, приводя к спаду в выходном сигнале из дифференциального усилителя 92. Наоборот, наклон вправо означает, что канал A принимает увеличение сигнала, и дифференциальным усилителем 92 формируется усиление выходного сигнала. Контроллер 30 обратной связи управляет системой 72 z-позиционирования, чтобы сохранить в заданном значении сигнал, принятый от дифференциального усилителя 92.
Независимо от сигнала обратной связи, или то же самое, что отклонение кантилевера, истинная высота зонда над поверхностью измеряется интерферометрической системой обнаружения высоты. Система обратной связи используется соответственно для гарантии, что среднее отклонение поддерживается на постоянном уровне.
Важно, что свет 76 в системе обнаружения фокусируется на обратной стороне 18b кантилевера. По этой причине система z-позиционирования также соединяется с объективом 78 и устроена так, что если зонд 16 поднимается или опускается, то объектив 78 поднимается или опускается на равную величину. В альтернативном варианте осуществления объектив 78 выбирается имеющим глубину фокуса больше диапазона перемещения, предполагаемого у наконечника. Соответственно, нет необходимости регулировать положение объектива относительно наконечника 20.
Нужно отметить, что хотя это изобретение описывается со ссылкой на фиг.3, которая иллюстрирует атомно-силовой микроскоп, видно, что эта система обнаружения может использоваться для всех сканирующих зондовых микроскопов, в которых важно точно определить высоту наконечника зонда.
В дополнительных вариантах осуществления сканирующие приводные механизмы (x, y) (не показаны на чертеже) и система 72 z-позиционирования могут заменяться любым подходящим средством привода, которое может быть не пьезоэлектрическим. Приводные механизмы могут прикрепляться к предметному столику 12, держателю 22 зонда или их сочетанию.
Детектор 28 отклонения, описанный выше, может быть заменен альтернативным известным средством измерения отклонения кантилевера 18. Например, кантилевер может быть образован из интегрированных пьезорезистивных датчиков. Система обнаружения высоты, аналогичная используемой для измерения высоты кантилевера, также может использоваться для измерения отклонения. То есть интерферометр используется для измерения высоты наконечника 20 относительно высоты основания кантилевера.
Источник света, используемый в этом варианте осуществления, является лазерным источником, но доступны и альтернативные источники. Для интерферометрического обнаружения свет должен быть когерентным до степени, требуемой спецификой интерферометра.
Неустановившееся движение кантилевера дает фундаментальное ограничение скорости, с которой может быть реализована обратная связь. Кантилеверу необходимо позволить устанавливаться в течение времени, необходимого системе обратной связи для измерения и регулирования отклонения. В противном случае неустановившееся движение создаст неправильную информацию об отклонении. Разные способы измерения отклонения соответственно накладывают немного разные ограничения на систему управления с обратной связью. При измерении отклонения с использованием угла кантилевера время отклика системы управления с обратной связью должно превышать время установления у ограниченного кантилевера. Однако если используется система обнаружения высоты (например, интерферометр, упоминаемый выше), то время отклика у системы управления с обратной связью ограничивается только резонансной частотой неограниченного кантилевера.
Альтернативное устройство AFM, которое особенно подходит для использования с системой обнаружения из этого изобретения, показано на фиг.4. На этой фигуре один или оба сканирующих приводных механизма (x, y) заменяются резонатором 94. Резонатор 94 является узлом качающегося привода, предназначенным для придания колебания предметному столику на его резонансной частоте или около нее. Такие резонансные сканирующие микроскопы обеспечивают очень быструю и стабильную возможность сканирования, которая может легко превосходить пороговый предел для работы в режиме постоянного взаимодействия. В качестве альтернативы резонатор 94 может быть предназначен для придания колебания узлу зонда на его резонансной частоте или близкой к ней.
Со ссылкой на фиг.5 подробнее показаны оптические компоненты системы 74 обнаружения. Как и на предыдущих фигурах, общим компонентам назначаются одинаковые позиции. Свет от лазерного источника 100 разделяется вторым светоделителем 102 на падающий луч 76 и опорный луч 104. Падающий луч 76 фокусируется объективом 78 на обратной стороне 18b кантилевера. После отражения от кантилевера луч 80 разделяется первым светоделителем 82. Как описывалось ранее, первая составляющая 84 направляется в детектор 90, 28, 92 отклонения, а вторая составляющая 86 - в интерферометр 88.
Внутри интерферометра луч 86, который отражен от кантилевера 18b, разделяется светоделителем 106. Опорный луч 104 направляется на соответствующим образом установленный ретрорефлектор 108, а после этого на светоделитель 106. Ретрорефлектор 108 расположен так, что он обеспечивает постоянную длину оптической траектории относительно вертикального (z) положения образца. Светоделитель 106 обладает поглощающим энергию покрытием и делит на падающий 86 и опорный 104 лучи для создания первой и второй интерферограмм с относительным фазовым сдвигом ~90°. Две интерферограммы обнаруживаются соответственно на первом 112 и втором 114 фотодетекторах.
В идеале сигналы фотодетектора являются комплементарными синусоидальным и косинусоидальным сигналами с разностью фаз в 90°. Кроме того, они не должны иметь сдвига постоянной составляющей, иметь одинаковые амплитуды и зависеть только от положения кантилевера x и длины волны λ лазера. Используются известные способы для контроля выходных сигналов фотодетектора 112, 114 наряду с изменением оптической разности хода, чтобы определить и применить исправления ошибок, возникающих в результате того, что два сигнала фотодетектора не являются полностью гармоническими с одинаковой амплитудой и со сдвигом фаз на 90 градусов. Аналогичным образом также корректируются уровни сдвига постоянной составляющей в соответствии со способами, известными в данной области техники.
Эти сигналы фотодетектора подходят для использования с традиционным интерферометрическим устройством реверсивного счета полос и устройством подразделения полос, которые могут предоставляться в виде специализированных аппаратных средств или в виде программируемого компьютера. Использование квадратурного устройства счета полос допускает измерение перемещений в положении кантилевера с точностью до λ/8. Это составляет до 66 нм для 532-нанометрового света. Известные методики подразделения полос на основе арктангенса сигналов допускают повышение точности до нанометрового масштаба или меньше.
Интерферометрические способы извлечения разности хода между двумя когерентными лучами хорошо известны в данной области техники и поэтому не будут описываться подробнее.
В описанном выше варианте осуществления опорный луч выполнен с возможностью иметь постоянную длину оптической траектории относительно z-положения образца. Он соответственно мог бы отражаться от поверхности столика, на который устанавливается образец, или от ретрорефлектора, чье положение связано с положением столика, как описано выше. В качестве альтернативы отношение между отражателем и z-положением образца не должно быть фиксированным. В таком варианте осуществления опорный луч может отражаться от фиксированной точки, причем фиксированная точка имеет известное (но меняющееся) отношение с z-положением образца. Высота наконечника поэтому выводится из измеренной методом интерферометрии разности хода и z-положения образца относительно фиксированной или неподвижной точки.
Интерферометр, описанный в этом документе, является одним примером гомодинной системы. Конкретная описанная система предлагает некоторое количество преимуществ для этого применения. Использование двух квадратурных интерферограмм дает возможность измерения перемещения кантилевера по нескольким полосам, а отсюда и в большем диапазоне перемещения. Использование фазосдвигающего покрытия на светоделителе 106 представляет интерферометр, чувствительный к поляризационному эффекту, например, возникающему от изменений в поляризации, когда световой луч отражается от кантилевера. Пример интерферометра на основе этих принципов описывается в US 6678056. Альтернативные интерферометрические системы, допускающие измерение изменения в длине оптической траектории, также могут применяться с этим изобретением. Подходящий гомодинный поляризационный интерферометр описывается в вышеупомянутом патенте EP 1892727, а подходящий гетеродинный интерферометр описывается в вышеупомянутом патенте US 5144150.
Понятно, что вышеописанный AFM допускает работу во втором режиме скорости сканирования. Информация о высоте, извлеченная системой обнаружения, представляет истинную высоту зонда, а отсюда и топографию поверхности образца. Это не зависит от положения основания зонда относительно наконечника, то есть от отклонения. Соответственно, хотя отклонение может колебаться около его среднего значения в ходе сканирования, это значение отклонения является особым для измерения высоты с помощью интерферометрии.
Однако при переходе в третий режим скорости сканирования необходимо включить дополнительный этап при подготовке к работе AFM согласно изобретению. Как было показано со ссылкой на фиг.2, если в кантилевере вызывается неустановившееся движение, то это проявляется в виде качательного движения обратной стороны 18b кантилевера. Чтобы избежать видимости этих воздействий в виде дефектов в изображении высоты, важно, чтобы опрашивающий лазерный луч 76 в системе обнаружения фокусировался на точке этого движения. То есть в положение над точкой 20a наконечника. Это может достигаться опытным путем посредством контроля выходного изображения и регулирования положения обнаружения падающего луча 76, пока не минимизируются или даже исчезнут периодические колебания, наложенные на изображение. То есть перед тем или когда устройство 70 используется для извлечения данных на скорости сканирования в третьем режиме, зонд и интерферометр должны быть установлены в правильное расположение.
Вторая причина, почему важно положение, в котором опрашивающий луч падает на обратную сторону кантилевера, будет показана со ссылкой на фиг.6. Эта фигура показывает три возможных положения падения лазерного луча на обратную сторону 18b кантилевера. В ситуации (а) зонд 16 находится в одной ориентации, а в ситуации (b) он проследовал за ступенькой на поверхности образца во вторую ориентацию. Если лазерный луч выставлен в положение A, справа от наконечника 20 зонда, то понятно, что измеренное изменение высоты A2-A1 больше высоты ступеньки, так как отклонение находится в малом угле в ситуации (b). Наоборот, если луч выставлен в положение C, то измеренное изменение C2-C1 меньше истинной высоты ступеньки. Правильный размер высоты ступеньки можно получить, только если лазерный луч точно выставлен в положение B: над самой близкой точкой соприкосновения (контакта) между наконечником 20 и образцом 14. То есть важно привести интерферометр точно в соответствие с геометрией зонда.
Как проблема истинной высоты, так и проблема влияния переходных процессов могут быть решены одинаковыми способами, так как они по существу преодолевают их путем позиционирования падающего луча непосредственно над точкой наконечника. Следует отметить, что проблема истинной высоты касается как второго, так и третьего режимов скорости сканирования; она возникает в результате разрешения наклону/отклонению кантилевера меняться, когда извлекается интерферометрическая информация о высоте. Соответственно, чтобы получить самую точную графическую информацию, этап приведения в соответствие системы обнаружения высоты и геометрии зонда следует выполнять для режимов скорости сканирования, в которых наклону/отклонению кантилевера разрешено меняться.
Как указано выше, выравнивание может достигаться эмпирическим путем на высоких скоростях сканирования либо до, либо в ходе сканирования, на которых вызываются переходные процессы. В качестве альтернативы может использоваться система регулирования, проиллюстрированная на фиг.7. В этой системе устройство 120 возбуждения лучом настроено для возбуждения колебаний в балке 18 кантилевера. Обратная сторона 18b кантилевера соответственно будет колебаться или качаться, результат чего можно наблюдать в свете, отражающемся от этой поверхности 18b, в виде периодических колебаний сигнала в системах обнаружения отклонения и высоты. В показанном варианте осуществления система 122 управления настроена для контроля выходного сигнала системы 88 обнаружения высоты. Если периодическое колебание в этом выходном сигнале наблюдается, когда колеблется кантилевер, то система 122 управления отправляет сигнал одному или нескольким приводным механизмам 124, которые, в свою очередь, перемещают точку обнаружения (в которой свет падает на обратную сторону 18b кантилевера) в сторону. Регулировка точки обнаружения продолжается до тех пор, пока не будут минимизированы воздействия качания в сигнале обнаружения высоты.
В варианте осуществления из фиг.7 приводной механизм 124 показан соединенным с системой 88 обнаружения высоты и соответственно функционирует для сдвига ориентации света, как указано стрелками 126, падающего на обратную сторону 18b кантилевера, так что смещается точка обнаружения. В качестве альтернативы приводной механизм или приводные механизмы 124 соединяются с самим зондом и они выполнены с возможностью перемещения зонда в сторону по направлению от системы 122 управления, а значит смещения точки обнаружения таким образом. То есть точка обнаружения регулируется либо путем перемещения зонда, либо ориентации света, падающего на зонд.
Колебания кантилевера 18, а отсюда и качание его обратной стороны 18b, формируются известным устройством 120 колебания луча, например пьезоэлектрическим преобразователем. В качестве альтернативы кантилевер 18 может быть приспособлен воспринимать электрические или магнитные поля. Колебания тогда могут формироваться посредством колебательных электрических или магнитных полей, на которые кантилевер 18 реагирует механически.
Альтернативным способом установки точки обнаружения является изменение высоты основания кантилевера наряду с контролем сигнала обнаружения высоты. Точка обнаружения на обратной стороне 18b кантилевера тогда может регулироваться для минимизации колебаний в сигнале обнаружения высоты, вызывающих изменения в высоте основания кантилевера. Высота основания может регулироваться с помощью различных механизмов, но одна полезная методика предназначена для изменения заданного значения обратной связи. Это заставит вертикальное расстояние между основанием кантилевера и образцом изменяться до тех пор, пока не будет достигнуто новое заданное значение. Этот способ обладает преимуществом возможности управления максимальной и минимальной силой, приложенной между образцом и наконечником.
Дополнительным вариантом является перемещение наконечника кантилевера на известное вертикальное расстояние, например, путем сканирования образца с известным колебанием высоты, например образца со стандартной ступенькой. Положение точки обнаружения на обратной стороне 18b кантилевера тогда регулируется до тех пор, пока сигнал обнаружения высоты не укажет правильное перемещение или колебание высоты.
Это в целом относится к определению местоположения обратной стороны 18b кантилевера непосредственно над точкой 20a наконечника эмпирически, а не геометрически от самого зонда. Причина в том, что всегда имеется некоторая неопределенность в положении наконечника при использовании современных способов производства зонда. Конечно, как только найдено положение наконечника для конкретного зонда с помощью эмпирической методики, например описанной выше, можно зарегистрировать его и соответственно избежать необходимости повторных эмпирических определений для последующих применений того же зонда.
Этот признак изобретения особенно подходит для использования с резонансными сканирующими микроскопами, например, описанными в публикации WO 2004/005844, в которой по меньшей мере одна составляющая растрового сканирования выполняется быстро путем возбуждения резонансных колебаний зонда (или то же самое, что образцу и столику). Такая скорость сканирования весьма вероятно вызовет неустановившееся движение кантилевера, что сделало бы неясным изображение, полученное системами обнаружения известного уровня техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| ЗОНД ДЛЯ АТОМНОГО СИЛОВОГО МИКРОСКОПА | 2004 |
|
RU2356110C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СОБСТВЕННЫХ КОЛЕБАНИЙ ИГЛЫ ЗОНДА СКАНИРУЮЩЕГО МИКРОСКОПА | 2019 |
|
RU2703607C1 |
| ЗОНД ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2320034C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
| ЗОНД ДЛЯ ЗОНДОВОГО МИКРОСКОПА С ИСПОЛЬЗОВАНИЕМ ПРОЗРАЧНОЙ ПОДЛОЖКИ, СПОСОБ ИЗГОТОВЛЕНИЯ ЗОНДА И УСТРОЙСТВО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2321084C2 |
| КОМПЛЕКТ ЗОНДОВ ДЛЯ МИКРОСКОПА СО СКАНИРУЮЩИМ ЗОНДОМ | 2007 |
|
RU2459214C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
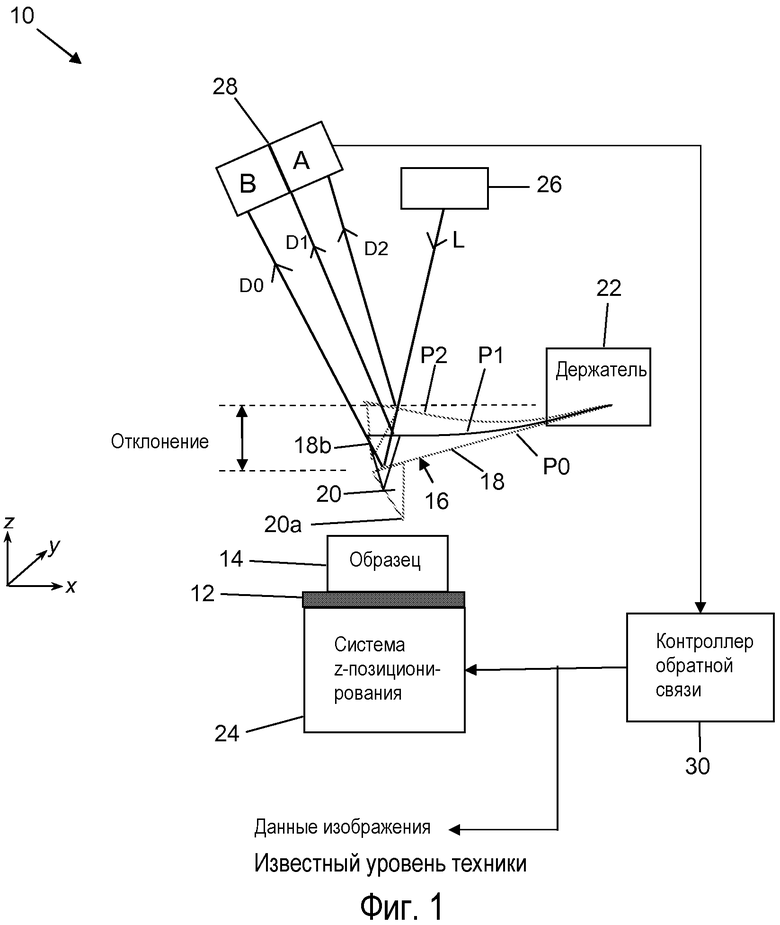

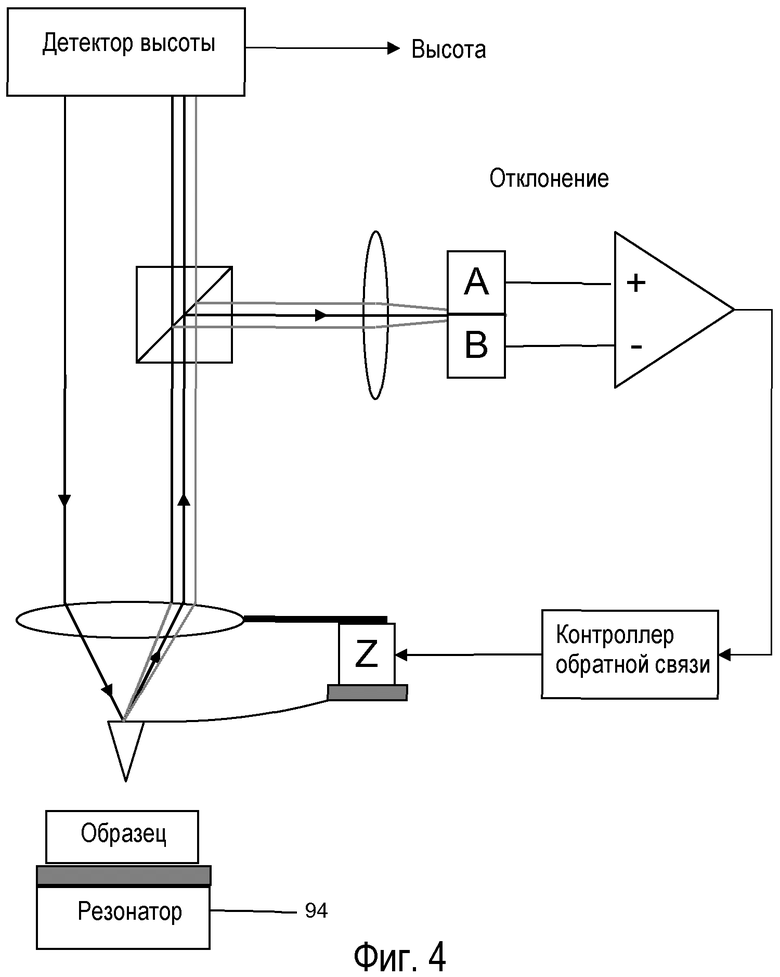
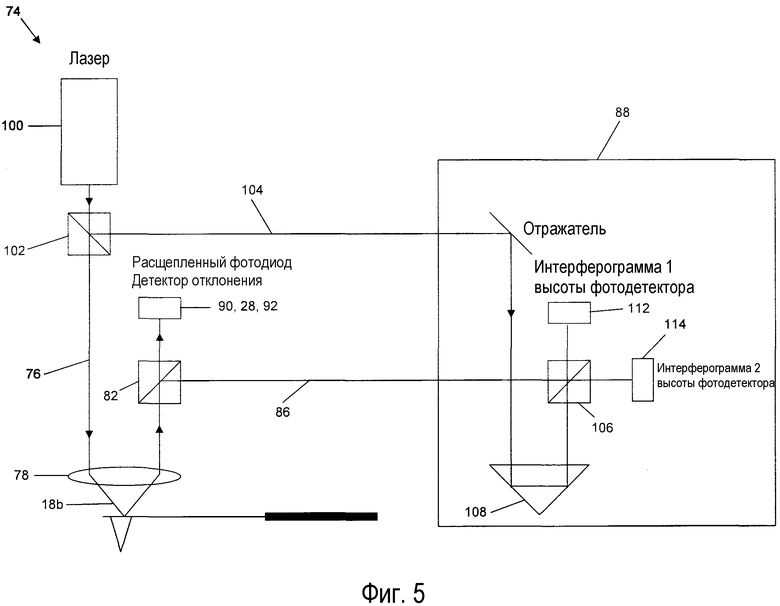
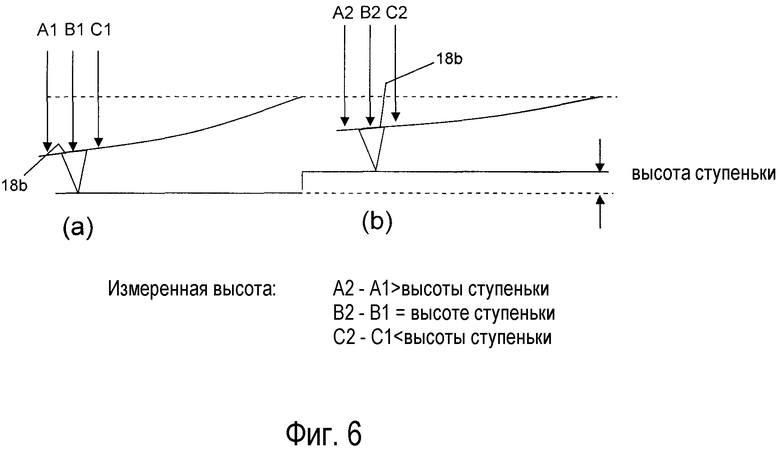
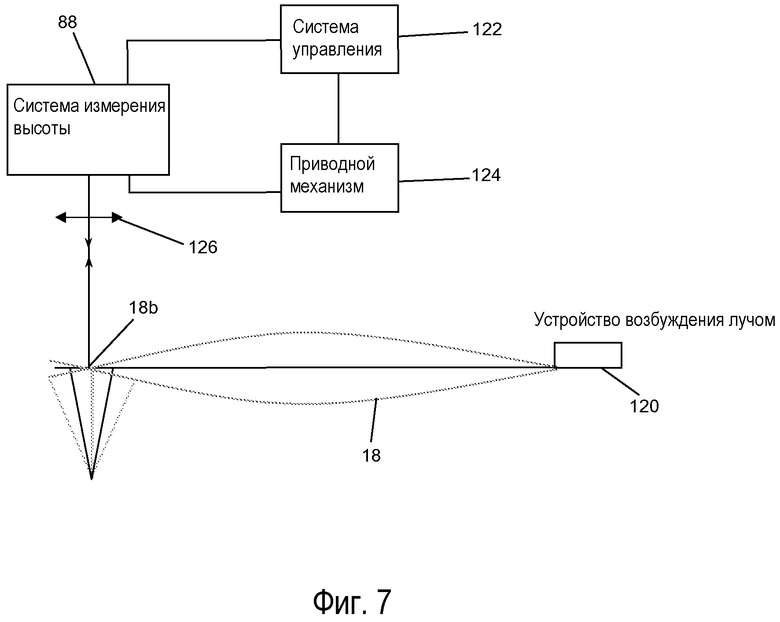
Система обнаружения зонда (74) для использования со сканирующим зондовым микроскопом содержит систему обнаружения высоты (88) и систему обнаружения отклонения (28). Когда сканируется поверхность образца, свет, отраженный от зонда (16) микроскопа, разделяется на две составляющие. Первая составляющая (84) анализируется системой обнаружения отклонения (28) и используется в системе обратной связи, которая поддерживает среднее отклонение зонда по существу постоянным во время сканирования. Вторая составляющая (86) анализируется системой обнаружения высоты (88), от которой получается указание высоты зонда над фиксированной контрольной точкой и посредством этого изображение поверхности образца. Технический результат - повышение функциональности, улучшение качества изображения. 7 н.з. и 30 з.п. ф-лы, 7 ил.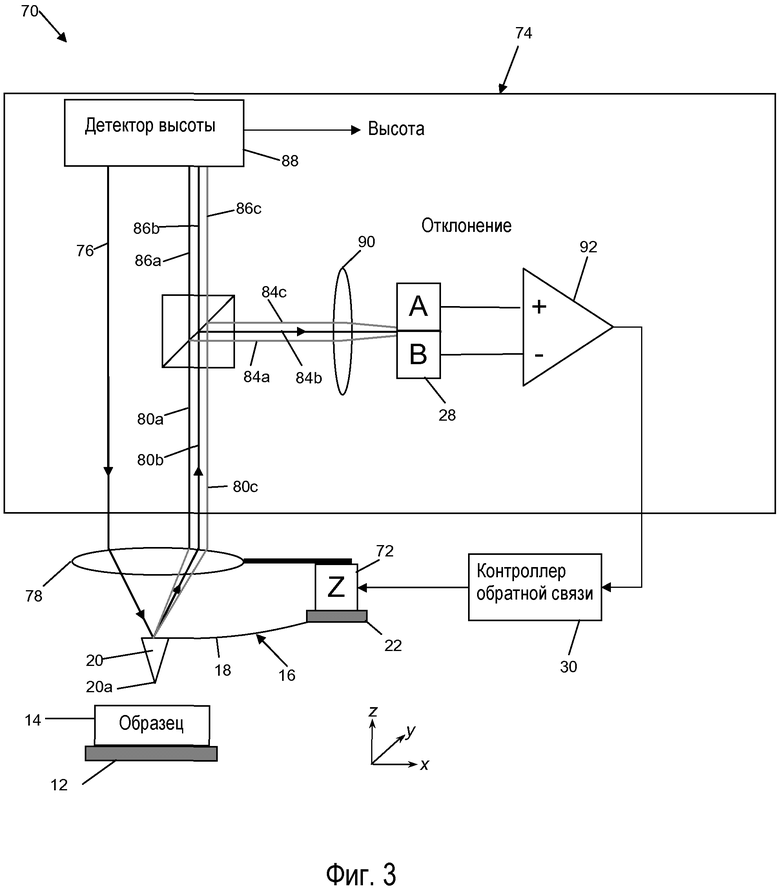
1. Система обнаружения для использования со сканирующим зондовым микроскопом, причем система содержит источник света для формирования луча, чтобы освещать зонд, содержащий кантилевер с опорным и свободным концами, причем свободный конец поддерживает острый наконечник, средство сбора для сбора света, отраженного от зонда, при этом луч освещает верхнюю поверхность зонда в окрестности его наконечника, и отраженный свет содержит две составляющие: первую составляющую, от которой получается указание отклонения верхней поверхности зонда, и вторую составляющую для передачи в систему обнаружения высоты, выполненную с возможностью извлечения из этой составляющей информации, относящейся к положению верхней поверхности зонда относительно контрольной точки.
2. Система обнаружения по п.1, в которой система обнаружения высоты содержит интерферометр, выполненный с возможностью обнаруживать разность хода между второй составляющей отраженного света и опорным лучом высоты.
3. Система обнаружения по п.2, в которой интерферометр включает в себя средство для формирования пары фазовых квадратурных интерферограмм.
4. Система обнаружения по п.3, где система включает в себя устройство счета полос, выполненное с возможностью создания выходного сигнала, зависящего от количества полос, обнаруженных в каждой интерферограмме.
5. Система обнаружения по п.4, в которой устройство счета полос включает в себя устройство подразделения полос.
6. Система обнаружения по любому из пп.3-5, в которой средство для формирования пары фазовых квадратурных интерферограмм является светоделителем с расщепляющим фазы покрытием.
7. Система обнаружения по любому из пп.2-5, в которой первая составляющая также передается интерферометру, причем интерферометр дополнительно выполнен с возможностью обнаружения оптической разности хода между первой составляющей отраженного света и опорным лучом отклонения, который распространяется по оптической траектории, чья длина задается положением на кантилевере, удаленным от его свободного конца, посредством этого предоставляя информацию относительно отклонения кантилевера.
8. Система обнаружения по п.7, в которой положение на кантилевере, удаленное от его свободного конца, является опорным концом кантилевера.
9. Система обнаружения по любому из пп.1-5, в которой первая составляющая передается детектору отклонения, причем детектор отклонения выполнен с возможностью предоставления указания отклонения верхней поверхности зонда.
10. Система обнаружения по п.9, в которой детектор отклонения является вторым интерферометром, причем второй интерферометр выполнен с возможностью обнаружения оптической разности хода между первой составляющей отраженного света и опорным лучом отклонения, который распространяется по оптической траектории, чья длина задается положением на кантилевере, удаленным от его свободного конца.
11. Система обнаружения по п.10, в которой положение на кантилевере, удаленное от его свободного конца, является опорным концом кантилевера.
12. Система обнаружения по п.9, в которой детектор отклонения является расщепленным фотодиодом, расположенным так, что первая составляющая отраженного света падает на две части диода с относительной силой света, определенной по углу ориентации верхней поверхности зонда.
13. Система обнаружения по любому из пп.1-5, причем система включает в себя светоделитель, выполненный с возможностью разделения отраженного света на первую и вторую составляющие.
14. Система обнаружения по любому из пп.1-5, в которой зонд содержит наконечник, установленный около свободного конца кантилевера, при этом кантилевер поддерживается в своем опорном конце, и где верхняя поверхность зонда, которая освещается лучом, находится над наконечником.
15. Система обнаружения по любому из пп.1-5, в которой зонд включает в себя исполнительный механизм, который функционирует для перемещения наконечника зонда.
16. Сканирующий зондовый микроскоп для формирования изображения образца в соответствии с взаимодействием между образцом и зондом, причем микроскоп содержит средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца, и систему обнаружения зонда по любому из пп.1-15.
17. Сканирующий зондовый микроскоп по п.16, в котором средство привода содержит двухкоординатный (x, y) сканер, выполненный с возможностью обеспечения относительного движения между зондом и поверхностью образца в плоскости, по существу параллельной поверхности образца, и приводной механизм z-направления, выполненный с возможностью обеспечения относительного движения в направлении, перпендикулярном поверхности образца.
18. Сканирующий зондовый микроскоп по п.17, в котором указание отклонения верхней поверхности зонда, полученное от системы обнаружения зонда, включается в систему обратной связи, содержащую приводной механизм z-направления, где приводной механизм z-направления выполнен с возможностью возврата указания угла ориентации зонда на заданный уровень.
19. Сканирующий зондовый микроскоп по п.18, в котором приводной механизм z-направления включает в себя приводной механизм основания, который выполнен с возможностью перемещения основания зонда.
20. Сканирующий зондовый микроскоп по п.19, в котором приводной механизм z-направления также включает в себя исполнительный механизм, который составляет одно целое с зондом, причем исполнительный механизм функционирует для перемещения наконечника зонда.
21. Сканирующий зондовый микроскоп по пп.18, 19 или 20, в котором система обратной связи работает в масштабе времени длиннее, чем масштаб, требуемый двухкоординатному (x, y) сканеру для перемещения зонда между пикселями изображения.
22. Сканирующий зондовый микроскоп по любому из пп.18-20, где двухкоординатный (x, y) сканер содержит резонатор, выполненный с возможностью придания колебаний либо зонду, либо образцу плюс опоре на резонансной частоте или близкой к ней.
23. Способ обнаружения света, отраженного от верхней поверхности сканирующего зонда, причем способ содержит этапы, на которых находят положение точки на верхней поверхности, которая находится непосредственно над наконечником зонда, направляют световой луч на верхнюю поверхность в точке непосредственно над наконечником зонда, собирают свет, отраженный от верхней поверхности, и направляют его в детектор высоты, выполненный с возможностью формирования изображения, указывающего высоту наконечника зонда над контрольным уровнем, при этом этап на котором находят положение точки на верхней поверхности, включает в себя этапы, на которых:
(a) направляют свет на верхнюю поверхность;
(b) придают колебания зонду около его наконечника с тем, чтобы изменить угол верхней поверхности;
(c) контролируют выходной сигнал детектора высоты;
(d) изменяют положение точки на верхней поверхности, в которую падает свет; и
(e) повторяют этапы (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате отклонения зонда.
24. Способ по п.23, в котором зонд содержит кантилевер, удерживаемый в его опорном конце и поддерживающий наконечник на свободном конце или рядом с ним, причем верхняя поверхность зонда, которая освещается лучом, находится на свободном конце кантилевера или рядом с ним.
25. Способ по любому из пп.23-24, в котором зонд является частью сканирующего зондового микроскопа, который включает в себя систему обнаружения по пп.1-15.
26. Способ обнаружения света, отраженного от верхней поверхности сканирующего зонда, содержащего кантилевер, причем способ содержит этапы, на которых находят положение точки на верхней поверхности, которая находится непосредственно над наконечником зонда, направляют световой луч на верхнюю поверхность в точке непосредственно над наконечником зонда, собирают свет, отраженный от верхней поверхности, и направляют его в детектор высоты, выполненный с возможностью формирования изображения, указывающего высоту наконечника зонда над контрольным уровнем при этом этап, на котором находят положение точки на верхней поверхности, включает в себя этапы, на которых:
(a) направляют свет на верхнюю поверхность кантилевера;
(b) перемещают основание кантилевера вертикально, в то же время поддерживая наконечник в фиксированном положении так, чтобы изменить угол ориентации кантилевера;
(c) контролируют выходной сигнал детектора высоты;
(d) изменяют положение точки на верхней поверхности, в которую падает свет; и
(e) повторяют этапы (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате перемещения основания зонда.
27. Способ по п.26, в котором зонд содержит кантилевер, удерживаемый в его опорном конце и поддерживающий наконечник на свободном конце или рядом с ним, причем верхняя поверхность зонда, которая освещается лучом, находится на свободном конце кантилевера или рядом с ним.
28. Способ по любому из пп.26-27, в котором зонд является частью сканирующего зондового микроскопа, который включает в себя систему обнаружения по пп.1-15.
29. Способ по п.26, в котором сигнал обратной связи получается из указания ориентации зонда, сигнал обратной связи является таким, чтобы вызвать регулировку высоты основания, так что зонд возвращается в предустановленную ориентацию, и где этап, на котором перемещают основание кантилевера вертикально, осуществляется путем изменения предустановленной ориентации.
30. Способ обнаружения света, отраженного от верхней поверхности сканирующего зонда, причем способ содержит этапы, на которых находят положение точки на верхней поверхности, которая находится непосредственно над наконечником зонда, направляют световой луч на верхнюю поверхность в точке непосредственно над наконечником зонда, собирают свет, отраженный от верхней поверхности, и направляют его в детектор высоты, выполненный с возможностью формирования изображения, указывающего высоту наконечника зонда над контрольным уровнем при этом этап, на котором находят положение точки на верхней поверхности, включает в себя этапы, на которых:
(a) направляют свет на верхнюю поверхность;
(b) перемещают наконечник зонда на известное расстояние;
(c) контролируют выходной сигнал детектора высоты;
(d) изменяют положение точки на верхней поверхности, на которую падает свет; и
(e) повторяют этапы (c) и (d) до тех пор, пока выходной сигнал детектора высоты не соответствует предполагаемому для известного перемещения.
31. Способ по п.30, в котором этап (b) содержит этап, на котором сканируют зондом по образцу с известным колебанием высоты.
32. Способ по п.30, в котором зонд содержит кантилевер, удерживаемый в его опорном конце и поддерживающий наконечник на свободном конце или рядом с ним, причем верхняя поверхность зонда, которая освещается лучом, находится на свободном конце кантилевера или рядом с ним.
33. Способ по любому из пп.30-32, в котором зонд является частью сканирующего зондового микроскопа, который включает в себя систему обнаружения по пп.1-15.
34. Способ обнаружения света, отраженного от верхней поверхности сканирующего зонда, причем способ содержит этапы, на которых находят положение точки на верхней поверхности, которая находится непосредственно над наконечником зонда, направляют световой луч на верхнюю поверхность в точке непосредственно над наконечником зонда, собирают свет, отраженный от верхней поверхности, и направляют его в детектор высоты, выполненный с возможностью формирования изображения, указывающего высоту наконечника зонда над контрольным уровнем, при этом этап, на котором находят положение точки на верхней поверхности, включает в себя этапы, на которых:
(a) направляют свет на верхнюю поверхность;
(b) сканируют зондом со скоростью, достаточной для возбуждения его неустановившегося движения;
(c) контролируют выходной сигнал детектора высоты;
(d) изменяют положение точки на верхней поверхности, на которую падает свет; и
(e) повторяют этапы (c) и (d) до тех пор, пока не минимизированы изменения, видимые в выходном сигнале детектора высоты в результате неустановившегося движения.
35. Способ по п.34, в котором зонд содержит кантилевер, удерживаемый в его опорном конце и поддерживающий наконечник на свободном конце или рядом с ним, причем верхняя поверхность зонда, которая освещается лучом, находится на свободном конце кантилевера или рядом с ним.
36. Способ по любому из пп.34-35, в котором зонд является частью сканирующего зондового микроскопа, который включает в себя систему обнаружения по пп.1-15.
37. Способ сбора данных, использующий сканирующий зондовый микроскоп, причем способ содержит этапы, на которых:
(a) перемещают зонд, содержащий кантилевер с опорным и свободным концами, причем свободный конец поддерживает острый наконечник, в непосредственной близости с поверхностью образца;
(b) направляют световой луч на верхнюю поверхность зонда в точке непосредственно над наконечником; и
(c) сканируют зондом по поверхности образца, одновременно собирая и анализируя свет, отраженный от верхней поверхности зонда, причем приводной механизм z-направления функционирует для приведения основания зонда вертикально в ответ на сигнал обратной связи, полученный при анализе первой составляющей собранного света, из которого получается указание отклонения верхней поверхности зонда, и где вторая составляющая собранного света передается интерферометру, выполненному с возможностью обнаружения разности хода между этой составляющей и опорным лучом высоты и выполненному с возможностью формирования изображения, указывающего высоту наконечника зонда над контрольным уровнем.
| US 2007234786 A1, 11.10.2007 | |||
| US 20070278177 A1, 06.12.2007 | |||
| WO 2005069802 A2, 04.08.2005 |

